
Abstract
We study how a particular spatial structure with a buffer impacts the number of equilibria and their stability in the chemostat model. We show that the occurrence of a buffer can allow a species to persist or on the opposite to go extinct, depending on the characteristics of the buffer. For non-monotonic response functions, we characterize the buffered configurations that make the chemostat dynamics globally asymptotically stable, while this is not possible with single, serial or parallel vessels of the same total volume and input flow. These results are illustrated with the Haldane kinetic function.






Similar content being viewed by others

References
Amarasekare P, Nisbet R (2001) Spatial heterogeneity, source sink dynamics, and the local coexistence of competing species. Am Nat 158(6):572–584
Andrews JF (1968) A mathematical model for the continuous culture of microorganisms utilizing inhibitory substrates. Biotech Bioeng 10:707–723
Bush A, Cook A (1976) The effect of time delay and growth rate inhibition in the bacterial treatment of wastewater. J Theor Biol 63(2):385–395
Butler GJ, Wolkowicz GSK (1985) A mathematical model of the chemostat with a general class of functions describing nutrient uptake. SIAM J Appl Math 45:138–151
de Gooijer C, Bakker W, Beeftink H, Tramper J (1996) Bioreactors in series: an overview of design procedures and practical applications. Enzyme Microb Technol 18:202–219
Di Mattia E, Grego S, Cacciari I (2002) Eco-physiological characterization of soil bacterial populations in different states of growth. Microb Ecol 43(1):34–43
Dochain D, Bastin G (1984) Adaptive identification and control algorithms for non linear bacterial growth systems. Automatica 20(5):621–634
Dochain D, Vanrolleghem P (2001) Dynamical modelling and estimation in wastewater treatment processes. IWA Publishing, UK
Dramé A, Harmand J, Rapaport A, Lobry C (2006) Multiple steady state profiles in interconnected biological systems. Math Comput Model Dyn Syst 12:379–393
El-Owaidy H, El-Leithy O (1990) Theoretical studies on extinction in the gradostat. Math Biosci 101(1):1–26
Escudié R, Conte T, Steyer JP, Delgenès JP (2005) Hydrodynamic and biokinetic models of an anaerobic fixed-bed reactor. Process Biochem 40:2311–2323
Fredrickson A, Stephanopoulos G (1981) Microbial competition. Science 213:972–979
Freedman H, Wolkowicz G (1986) Predator-prey systems with group defence: the paradox of enrichment revisited. Bull Math Biol 48(5/6):493–508
Fritzsche C, Huckfeldt K, Niemann E-G (2011) Ecophysiology of associative nitrogen fixation in a rhizosphere model in pure and mixed culture. FEMS Microbiol Ecol 8(4):279–290
Gaki A, Al Theodorou, Vayenas D, Pavlou S (2009) Complex dynamics of microbial competition in the gradostat. J Biotechnol 139(1):38–46
Gravel D, Guichard F, Loreau M, Mouquet N (2010) Source and sink dynamics in metaecosystems. Ecology 91:2172–2184
Haidar I, Rapaport A, Gérard F (2011) Effects of spatial structure and diffusion on the performances of the chemostat. Math Biosci Eng 8(4):953–971
Harmand J, Rapaport A, Trofino A (1999) Optimal design of two interconnected bioreactors—some new results. Am Inst Chem Eng J 49:1433–1450
Harmand J, Rapaport A, Mazenc F (2006) Output tracking of continuous bioreactors through recirculation and by-pass. Automatica 42(7):1025–1032
Hasler A, Johnson W (1954) The in situ chemostat—a self-contained continuous culturing and water sampling system. Limnol Oceanogr 79:326–331
Higashi Y, Ytow N, Saida H, Seki H (1998) In situ gradostat for the study of natural phytoplankton community with an experimental nutrient gradient. Environ Pollut 99:395–404
Hill G, Robinson C (1989) Minimum tank volumes for CFST bioreactors in series. Can J Chem Eng 67:818–824
Hofbauer J, So W (1994) Competition in the gradostat: the global stability problem original research. Nonlinear Anal Theory Methods Appl 22(8):1017–1031
Jaeger W, So J-H, Tang B, Waltman P (1987) Competition in the gradostat. J Math Biol 25:23–42
Jannash H, Mateles R (1974) Experimental bacterial ecology studies in continuous culture. Adv Microb Physiol 11:165–212
La Rivière J (1977) Microbial ecology of liquid waste. Adv Microb Ecol 1:215–259
Lenas P, Thomopoulos N, Vayenas D, Pavlou S (1998) Oscillations of two competing microbial populations in configurations of two interconnected chemostats. Math Biosci 148(1):43–63
Levin S (1974) Dispersion and population interactions. Am Nat 108(960):207–228
Li B (1998) Global asymptotic behavior of the chemostat: general response functions and differential removal rates. SIAM J Appl Math 59:411–22
Loreau M (2010) From populations to ecosystems: theoretical foundations for a new ecological synthesis. Princeton University Press, Princeton
Loreau M, Daufresne T, Gonzalez A, Gravel D, Guichard F, Leroux SJ, Loeuille N, Massol F, Mouquet N (2013) Unifying sources and sinks in ecology and Earth sciences. Biol Rev 88:365–79
Lovitt R, Wimpenny J (1981) The gradostat: a bidirectional compound chemostat and its applications in microbial research. J Gen Microbiol 127:261–268
Luyben K, Tramper J (1982) Optimal design for continuously stirred tank reactors in series using Michaelis–Menten kinetics. Biotechnol Bioeng 24:1217–1220
MacArthur R, Wilson E (1967) The theory of island biogeography. Princeton University Press, Princeton
Mischaikow M, Smith H, Thieme H (1995) Asymptotically autonomous semiflows: chain recurrence and Lyapunov functions. Trans Am Math Soc 347(5):1669–1685
Monod J (1950) La technique de la culture continue: Théorie et applications. Annales de l’Institut Pasteur 79:390–410
Nakaoka S, Takeuchi Y (2006) Competition in chemostat-type equations with two habitats. Math Biosci 201:157–171
Nelson M, Sidhu H (2006) Evaluating the performance of a cascade of two bioreactors. Chem Eng Sci 61:3159–3166
Novick A, Szilard L (1950) Description of the chemostat. Science 112:715–716
Pirt J (1975) Principles of microbe and cell cultivation. Blackwell Scientific Publications, London
Rapaport A, Harmand J (2008) Biological control of the chemostat with non-monotonic response and different removal rates. Math Biosci Eng 5(3):539–547
Rapaport A, Harmand J, Mazenc F (2008) Coexistence in the design of a series of two chemostats. Nonlinear Anal Real World Appl 9:1052–1067
Schaum A, Alvarez J, Lopez-Arenas T (2012) Saturated PI control of continuous bioreactors with Haldane kinetics. Chem Eng Sci 68:520–529
Smith H, Tang B (1989) Competition in the gradostat: the role of the communication rate. J Math Biol 27(2):139–165
Smith H, Waltman P (1991) The gradostat: a model of competition along a nutrient gradient. J Microb Ecol 22:207–226
Smith H, Waltman P (1995) The theory of chemostat, dynamics of microbial competition. Cambridge studies in mathematical biology. Cambridge University Press, Cambridge
Smith H, Waltman P (2000) Competition in the periodic gradostat. Nonlinear Anal Real World Appl 1(1):177–188
Smith H, Tang B, Waltman P (1991) Competition in an n-vessel gradostat. SIAM J Appl Math 51:1451–1471
Stephanopoulos G, Fredrickson A (1979) Effect of inhomogeneities on the coexistence of competing microbial populations. Biotechnol Bioeng 21:1491–1498
Tang B (1986) Mathematical investigations of growth of microorganisms in the gradostat. J Math Biol 23:319–339
Tang B (1994) Competition models in the gradostat with general nutrient uptake functions. Rocky Mt J Math 24(1):335–349
Veldcamp H (1977) Ecological studies with the chemostat. Adv Microb Ecol 1:59–95
Wolkowicz G, Lu Z (1992) Global dynamics of a mathematical model of competition in the chemostat: general response functions and differential death rates. SIAM J Appl Math 52:222–233
Xiao D, Ruan S (2001) Global analysis in a predator-prey system with nonmonotonic functional response. SIAM J Appl Math 61(4):11445–72
Zaghrout A (1992) Asymptotic behavior of solutions of competition in gradostat with two limiting complementary substrates. Appl Math Comput 49(1):19–37
Acknowledgments
The authors are grateful to INRA and INRIA supports within the French VITELBIO (VIRtual TELluric BIOreactors) research program. The authors thank also Prof. Denis Dochain, CESAME, Univ. Louvain-la-Neuve, for fruitful discussions. The authors would also like to thank the anonymous referees for their relevant suggestions for improvements of our initial work.
Author information
Authors and Affiliations
Corresponding author
Additional information
The paper represents part of Ihab Haidar’s PhD work, thesis defended at University of Montpellier II, 34095 Montpellier, France.
Appendix
Appendix
Proof of Lemma 1
In the serial connection, the dynamics of the first tank of volume \(V_{1}\) is given by Eq. (1) where \(V\) is replaced by \(V_{1}\le V\). Its dilution rate is then equal to \(Q/V_{1}\), that is greater than \(Q/V\) and consequently one has \(S_{in}\notin \varLambda (Q/V_{1})\). According to Proposition 1, only cases 1 or 2 can occur in the first tank.
In the parallel connection, the dynamics of each tank of volume \(V_{i}\) and flow rate \(Q_{i}\) is given by Eq. (1) where \(V\) and \(Q\) are replaced by \(V_{i}\) and \(Q_{i}\). Denote \(r_{i}=V_{i}/V\) and \(\alpha _{i}=Q_{i}/Q\), and notice that one has \(\sum _{i}r_{i}=\sum _{i}\alpha _{i}=1\). Then, the dilution rate \(D_{i}\) in the tank \(i\) is equal to \(\alpha _{i}/r_{i}D\). According to Proposition 1, a necessary condition for having the washout equilibrium repulsive in each tank is to have \(D_{i}<D\) for any \(i\), that is \(\alpha _{i}<r_{i}\), which contradicts \(\sum _{i}r_{i}=\sum _{i}\alpha _{i}=1\). \(\square \)
Before giving the proof of Theorem 1, we present in the next proposition a series of results concerning the multiplicity of equilibria and the characterization of the sets \(\overline{R}_{\alpha }(D)\) defined in (14).
Proposition 2
Let Assumption 1 be fulfilled. Fix \(D>0\) and take a positive number \(\alpha \) such that \(\varLambda (\alpha D)\ne \emptyset \) and \(\lambda _{-}(\alpha D) < S_{in}\). Let \(S_{2}^{\star }(\alpha ) \in (0,S_{in})\) be such that \(\mu (S_{2}^{\star }(\alpha ))=\alpha D\). Then\(,\) for any \(r \in (0,1)\) there exists an equilibrium \((S_{1}^{\star },S_{in}-S_{1}^{\star },S_{2}^{\star }(\alpha ), S_{in}-S_{2}^{\star }(\alpha ))\) of (6), with
Furthermore\(,\) the set \(R_{\alpha }(D)\) defined in (18) is not reduced to a singleton when it is non-empty. We distinguish two different cases:
-
\((\)Case I\()\) \(\varLambda (D)=\emptyset \) or \(\lambda _{-}(D)\ge S_{in}\) or \(\lambda _{+}(D)\ge S_{in}\). One has
$$\begin{aligned} \overline{R}_{\alpha }(D) = \left| \begin{array}{ll} (0,1) &{} \quad \text{ when } R_{\alpha }(D)=\emptyset ,\\ (0,1)\setminus \left[ \min R_{\alpha }(D),\max R_{\alpha }(D)\right] &{}\quad \text{ when } R_{\alpha }(D)\ne \emptyset . \end{array}\right. \end{aligned}$$For \(r\notin \overline{R}_{\alpha }(D),\) the exist at least three equilibria with \(S_{1}^{\star } \in (\underline{S}(\alpha ),S_{in})\) when \(\varLambda (D)=\emptyset \) or \(S_{1}^{\star } \in (\lambda _{-}(D),\underline{S}(\alpha ))\) when \(\varLambda (D)\ne \emptyset \).
-
\((\)Case II\()\) \(\lambda _{+}(D)< S_{in}.\) We consider a partition of the set \(R_{\alpha }(D)\) with
$$\begin{aligned} R^{-}_{\alpha }(D)&= \{ r \in (0,1) \; \vert \; \exists s \in {\mathcal S}_{\alpha ,r}(D) \text{ s.t. } (s-\underline{S} (\alpha ))(\lambda _{+}(D)-\underline{S}(\alpha ))< 0 \},\\ R^{+}_{\alpha }(D)&= \{ r \in (0,1) \; \vert \; \exists s \in {\mathcal S}_{\alpha ,r}(D) \text{ s.t. } (s-\lambda _{+}(D))(\lambda _{+}(D)-\underline{S}(\alpha ))\ge 0\}. \end{aligned}$$Then\(,\) the set \(R^{+}(\alpha )\) is non-empty\(,\) and the set \(R^{-}(\alpha )\) is not reduced to a singleton when it is non-empty. One has
$$\begin{aligned}&\overline{R}_{\alpha }(D)\\&\quad =\left| \begin{array}{l} (0,\min R^{+}(\alpha )), \quad \text{ when } R^{-}(\alpha )=\emptyset ,\\ (0,\min R^{+}(\alpha )) \; \cap \; (0,1)\setminus [\min R^{-}(\alpha ),\max R^{-}(\alpha )],\quad \text{ when } R^{-}(\alpha )\ne \emptyset . \end{array}\right. \end{aligned}$$For any \(r\in (\min R^{+}(\alpha ),1),\) there exist at least two equilibria such that \((\underline{S}(\alpha )-S^{\star }_{1})(\lambda _{+} (D)-\underline{S}(\alpha ))\ge 0,\) and at least four for \(r\) in a subset of \((\min R^{+}(\alpha ),1)\) when \(R^{+}(\alpha )\) is not reduced to a singleton. When \(R^{-}(\alpha )\) is non-empty\(,\) for any \(r \in (\min R^{-}(\alpha ),\max R^{-}(\alpha )),\) there exist at least three equilibria such that \((\underline{S}(\alpha )-S^{\star }_{1})(\lambda _{+}(D)- \underline{S}(\alpha ))<0.\)
Remark 2
In case II, the tangency of the graphs of \(\phi _{\alpha ,r}\) and \(\mu \) occurs for a certain \(r\) with an abscissa that is located
-
either at the right of \(\lambda _{+}\) when \(\underline{S} (\alpha )<\lambda _{+}(D)\),
-
either at the left of \(\lambda _{+}\) when \(\underline{S} (\alpha )>\lambda _{+}(D)\).
These cases correspond to the subset \(R_{\alpha }^{+}(D)\) while the subset \(R_{\alpha }^{-}(D)\) corresponds to other tangencies that could occur (but that do not necessarily exist) on either side of \(\underline{S}(\alpha )\).
Proof of Proposition 2
Fix \(D\) and \(\alpha \) such that \(\varLambda (\alpha D)\ne \emptyset \) and \(\lambda _{-}(\alpha D)<S_{in}\). For simplicity, we denote by \(S_{2}^{\star }\) and \(\underline{S}\) the values of \(S_{2}^{\star }(\alpha )\) and \(\underline{S}(\alpha )\), with \(S_{2}^{\star }\) such that \(\mu (S_{2}^{\star })=\alpha D\). For each \(r \in (0,1)\), we define the function
A non-negative equilibrium for the first tank has then to satisfy \(f_{r}(S_{1}^{\star })=0\).
One can easily check that \(\phi _{\alpha ,r}(\underline{S})=1\) whatever the value of \(r \in (0,1)\). The function \(\phi _{\alpha ,r}(\cdot )\) being decreasing, one has \(\phi _{\alpha ,r}(s)>1\) for \(s<\underline{S}\) and \(\phi _{\alpha ,r}(s)<1\) for \(s>\underline{S}\). For convenience, we shall also consider the function
that is defined on the set of \(s \in (0,S_{in})\) such that \((S_{in}-s)\mu (s)\ne S_{in}-\underline{S}\). On this set, one can easily check that the following equivalence is fulfilled
From (22), one can also write
and deduce the property
Recursively, one obtains for every integer \(n\)
Consequently, the set \({\mathcal S}_{\alpha ,r}\) defined in (17) can be characterized as
or equivalently
We distinguish several cases depending on the position of \(\underline{S}\) with respect to the set \(\varLambda (D)\). In the following, we simply denote \(\varLambda \), \(\lambda _{\pm }\) and \(R_{\alpha }\) for \(\varLambda (D)\), \(\lambda _{\pm }(D)\) and \(R_{\alpha }\)(D) respectively.
Case I. When \(\varLambda =\emptyset \) or \(\lambda _{-}\ge S_{in}\), the function \(f_{r}\) is strictly positive on the interval \([0,\underline{S}]\). On the interval \(J=(\underline{S},S_{in})\), the function \(\gamma (\cdot )\) is well defined with \(\gamma (J)=(0,1)\), \(\gamma (\underline{S})=0\) and \(\gamma (S_{in})=1\). Consequently, there exists at least one solution of \(f_{r}(s)=0\), that necessarily belongs to the interval \(J\). If \(R_{\alpha }=\emptyset \), \(\gamma (\cdot )\) is increasing and there exists a unique solution of \(\gamma (S_{1}^{\star })=r\) whatever is \(r\). Notice that when the function \(\mu (\cdot )\) is increasing on \([0,S_{in}]\) (which is necessarily the case when \(\lambda _{-}\ge S_{in}\)), one has necessarily \(R_{\alpha }=\emptyset \), because the function \(f_{r}\) is decreasing. Otherwise, property (24) implies that \(\gamma \) admits local extrema, and \(\min R_{\alpha }\) and \(\max R_{\alpha }\) are respectively the smallest local minimum and largest local maximum of the function \(\gamma \) on the interval \(J\). Consequently, the set \(R_{\alpha }\) cannot be reduced to a singleton. Then, uniqueness of \(S_{1}^{\star }\) is achieved exactly for \(r\) that does not belong to \([\min R_{\alpha },\max R_{\alpha }]\). For any \(r \in (\min R_{\alpha },\max R_{\alpha })\), there are at least three solutions, that all belong to \(J\), by the Mean Value Theorem.
When \(\lambda _{-}<S_{in}\le \lambda _{+}\), we distinguish two sub-cases:
- \(\underline{S}\le \lambda _{-}\)::
-
the function \(f_{r}\) is strictly positive on \([0,\underline{S})\) and strictly negative on \((\lambda _{-},S_{in})\). Furthermore, \(f_{r}\) is decreasing on \([\underline{S}, \lambda _{-}]\). So there exists a unique root \(S_{1}^{\star }\) of \(f_{r}\) that necessarily belongs to \([\underline{S}, \lambda _{-}]\) (and the set \(R_{\alpha }\) is empty).
- \(\underline{S} > \lambda _{-}\)::
-
the function \(f_{r}\) is strictly positive on \([0,\lambda _{-}]\) and strictly negative on \([\underline{S}, S_{in})\). On the interval \(I=(\lambda _{-},\underline{S})\), the function \(\gamma (\cdot )\) is well defined and \(\gamma (I)=(0,1)\) with \(\gamma (\lambda _{-})=1\) and \(\gamma (\underline{S})=0\). If \(R_{\alpha }\) is empty, then \(\gamma (\cdot )\) is decreasing on \(I\), and for any \(r\in (0,1)\) there exits a unique \(S_{1}^{\star }\) such that \(\gamma (S_{1}^{\star })=r\). If \(R_{\alpha }\) is non-empty, property (24) implies that \(\gamma \) admits local extrema, and \(\min R_{\alpha }\) and \(\max R_{\alpha }\) are respectively the smallest local minimum and largest local maximum of the function \(\gamma \) on the interval \(I\). Then, uniqueness of \(S_{1}^{\star }\) on \(J\) is achieved exactly for \(r\) that does not belong to \([\min R_{\alpha },\max R_{\alpha }]\). For any \(r \in (\min R_{\alpha },\max R_{\alpha })\), there are at least three solutions, that all belong to the interval \(I\), by the Mean Value Theorem.
Case II. Notice that in this case (\(\lambda _{+}<S_{in}\)) the function \(\mu \) is non-monotonic. We consider three sub-cases depending on the relative position of \(\underline{S}\) with respect to \(\lambda _{+}\).
Sub-case 1: \(\underline{S} < \lambda _{+}\). As for case I, we distinguish:
- \(\underline{S}\le \lambda _{-}\)::
-
one has \(f_{r}(\underline{S})\ge 0\) and \(f_{r}(S)<0\) for any \(S \in \varLambda \). \(f_{r}(\cdot )\) being decreasing on \([0,\lambda _{-}]\), one deduces that there exists exactly one solution \(S_{1}^{\star }\) of \(f_{r}(S)=0\) on the interval \([0,\lambda _{+}]\), whatever is \(r\). Furthermore, this solution has to belong to \([\underline{S},\lambda _{-}]\). The functions \(\phi _{r}(\cdot )\) and \(\mu (\cdot )\) being respectively decreasing and increasing on this interval, one has necessarily \(\gamma ^{\prime }(S_{1}^{\star })\ne 0\) and then \(R^{-}_{\alpha }=\emptyset \).
- \(\underline{S} > \lambda _{-}\)::
-
one has \(f_{r}(S)>0\) for any \(S \in [0,\lambda _{-}]\), and \(f_{r}(S)<0\) for any \(S \in [\underline{S}, \lambda _{+}]\). On the interval \(I=(\lambda _{-},\underline{S})\), the function \(\gamma (\cdot )\) is well defined and \(\gamma (I)=(0,1)\) with \(\gamma (\lambda _{-})=1\) and \(\gamma (\underline{S})=0\). If \(R^{-}_{\alpha }\) is empty, then \(\gamma (\cdot )\) is decreasing on \(I\), and for any \(r\in (0,1)\) there exits a unique \(S_{1}^{\star } \in I\) such that \(\gamma (S_{1}^{\star })=r\). If \(R^{-}_{\alpha }\) is non-empty, property (24) implies that \(\gamma \) admits local extrema. Similarly to case I, we obtain by the Mean Value Theorem that there exists exactly one solution \(S_{1}^{\star }\) of \(\gamma (s)=r\) on the interval \([0,\lambda _{+}]\) for any \(r\notin [\min R^{-}_{\alpha },\min R^{-}_{\alpha }]\), and there are at least three solutions for \(r \in (\min R^{-}_{\alpha },\min R^{-}_{\alpha })\).
Differently to case I, we have also to consider the interval \(K=(\lambda _{+},S_{in})\) where the function \(\gamma (\cdot )\) is well defined and positive with \(\gamma (\lambda _{+})=1\) and \(\lim _{s\rightarrow S_{in}}\gamma (s)=1\). We define
that belongs to \((0,1)\). Then \(r^{+}\) belongs to \(R^{+}_{\alpha }\), and for any \(r<r^{+}\) there is no solution of \(\gamma (s)=r\) on \(K\). Thus \(r^{+}\) is the minimal element of \(R^{+}_{\alpha }\). By the Mean Value Theorem there are at least two solutions of \(\gamma (s)=r\) on \(K\) when \(r>r^{+}\). When \(R^{+}_{\alpha }\) is not reduced to a singleton, the function \(\gamma \) has at least on local maximum \(r_{M}\) and one local minimum \(r_{m}\), in addition to \(r^{+}\). By the Mean Value Theorem, there are at least four solutions of \(\gamma (s)=r\) on \(K\) for \(r \in (r_{m},r_{M})\).
Finally, we have shown that the set \(R^{+}_{\alpha }\) is non-empty, and that the uniqueness of the solution of \(\gamma (S_{1}^{\star })=r\) occurs exactly for values of \(r\) that do not belong to the set \([\min R^{-}_{\alpha },\max R^{-}_{\alpha }] \cup [\min R^{+}_{\alpha },1]\).
Sub-case 2: \(\underline{S} = \lambda _{+}\). One has \(f_{r}(\underline{S})=0\) for any \(r\), so there exists a positive equilibrium with \(S_{1}^{\star }=\underline{S}\). \(f_{r}(S)>0\) for any \(S \in [0,\lambda _{-}]\) and the function \(\gamma (\cdot )\) is well defined on \(I\cup J=(\lambda _{-},\underline{S})\cup (\underline{S},S_{in})\) with \(\gamma (I\cup J)=(0,1)\), \(\gamma (\lambda _{-})=1\) and \(\lim _{s\rightarrow S_{in}} \gamma (s)=1\). Using the L’Hôpital’s rule, we show that the function \(\gamma (\cdot )\) can be continuously extended at \(\underline{S}\):
Note that \(\mu ^{\prime }(\underline{S})<0\) so that \(\gamma (\underline{S})\) belongs to \((0,1)\), and we pose
Then, for \(r<{\bar{r}}\), there is no solution of \(\gamma (s)=r\) on \((\lambda _{-},S_{in})\), and \(\underline{S}\) is the only solution of \(f_{r}(s)=0\) on \((0,S_{in})\). On the contrary, for \(r>{\bar{r}}\), there are at least two solutions of \(\gamma (s)=r\) on \((\lambda _{-}, S_{in})\) and the dynamics has at least two positive equilibria.
Similarly, the function \(\gamma (\cdot )\) is \(C^{1}\) on \((\lambda _{-}, S_{in})\) because it is differentiable at \(\underline{S}\):
(and recursively as many time differentiable as the function \(\mu (\cdot )\) is, minus one). Then \({\bar{r}}\) is the minimal element of the set \(R^{+}_{\alpha }\), and the set \(R^{-}_{\alpha }\) is empty by definition. As previously, when \(R^{+}_{\alpha }\) is not reduced to a singleton, \(\gamma (s)=r\) has at least four solutions for \(r\) in a subset of \((\min R^{+}_{\alpha },1)\).
Sub-case 3: \(\underline{S} > \lambda _{+}\). We proceed similarly as in sub-case 1. Note first that there is no solution of \(f_{r}(s)=0\) on the intervals \((0,\lambda _{-})\) and \((\lambda _{+},\underline{S})\) whatever is \(r\).
On the set \(\varLambda \), \(\gamma (\cdot )\) is well defined with \(\gamma (\varLambda )\subset (0,1)\), \(\gamma (\lambda _{-})=1\) and \(\gamma (\lambda _{+})=1\) and we define
that belongs to \((0,1)\). One has necessarily \(r^{+}=\min R^{+}_{\alpha }\), and there is no solution of \(\gamma (S_{1}^{\star }) = r\) exactly when \(r<r^{+}\). For \(r>r^{+}\), there exist at least two solutions by the Mean Value Theorem, and four for a subset of \((r^{+},1)\) when \(R^{+}_{\alpha }\) is not reduced to a singleton.
On the interval \(J=(\underline{S},S_{in})\), the function \(\gamma (\cdot )\) is well defined with \(\gamma (J)=(0,1)\), \(\gamma (\underline{S})=0\) and \(\gamma (S_{in})=1\). There exists at least one solution of \(f_{r}(s)=0\) on this interval. If \(R^{-}_{\alpha }=\emptyset \), \(\gamma (\cdot )\) is increasing and there exists a unique solution of \(\gamma (S_{1}^{\star })=r\) on \(J\) whatever is \(r\). Otherwise, \(\min R^{-}_{\alpha }\) and \(\max R^{-}_{\alpha }\) are the smallest local minimum and largest local maximum of the function \(\gamma \) on the interval \(J\), respectively. Then, uniqueness of \(S_{1}^{\star }\) on \(J\) is achieved exactly for \(r\) that does not belong to \([\min R^{-}_{\alpha },\max R^{-}_{\alpha }]\), and for \(r \in (\min R^{-}_{\alpha },\max R^{-}_{\alpha })\), there are at least three solutions by the Mean Value Theorem. \(\square \)
For the proof of Theorem 1, we recall below a result about asymptotically autonomous dynamics (Mischaikow et al. 1995, Theorem 1.8).
Theorem 2
Let \(\varPhi \) be an asymptotically autonomous semi-flow with limit semi-flow \(\varTheta ,\) and let the orbit \({\mathcal O}_{\varPhi }(\tau ,\xi )\) have compact closure. Then the \(\omega \)-limit set \(\omega _{\varPhi }(\tau ,\xi )\) is non-empty\(,\) compact\(,\) connected\(,\) invariant and chain-recurrent by the semi-flow \(\varTheta \) and attracts \(\varPhi (t,\tau ,\xi )\) when \(t \rightarrow \infty .\)
We shall also need to treat a limiting case of the single chemostat that is not covered by Proposition 1, when one has exactly \(\mu (S_{in})=\alpha D\) for the buffer tank with \(\mu (\cdot )\) non-monotonic, that is provided by the following lemma.
Lemma 2
For any \(\alpha >0\) such that \( \alpha D\le \mu (S_{in})\) and non-negative initial condition with \(X_{2}(0)>0,\) the solution \(S_{2}(t)\) and \(X_{2}(t)\) of (6) is non negative for any \(t>0\) and one has
Proof of Lemma 2
From Eq. (6) one can write the properties
and deduces that the variables \(S_{2}(t)\) and \(X_{2}(t)\) remain non negative for any positive time. Considering the variable \(Z_{2}=S_{2}+X_{2}-S_{in}\) whose dynamics is \(\dot{Z}_{2}=-\alpha D Z_{2}\), we conclude that \(S_{2}(t)\) are \(X_{2}(t)\) are bounded and satisfy
The dynamics of the variable \(S_{2}\) can thus be written as an non autonomous scalar equation:
that is asymptotically autonomous. The study of this asymptotic dynamics is straightforward: any trajectory that converges forwardly to the domain \([0,S_{in}]\) has to converge to \(S_{in}\) or to a zero \(S_{2}^{\star }\) of \(S_{2}\mapsto \alpha D -\mu (S_{2})\) on the interval \((0,S_{in})\). Then, the application of Theorem 2 allows to conclude that forward trajectories of the \((S_{2},X_{2})\) sub-system converge asymptotically either to the positive steady state \((S_{2}^{\star },S_{in}-S_{2}^{\star })\) or to the “washout” equilibrium \((S_{in},0)\).
For \(\alpha \) such that \(\alpha D < \mu (S_{in})\), there is only one such zero, that is equal to \(\lambda _{-}(\alpha D)\) (and necessarily lower than \(S_{in}\)). We are in conditions of case 3 of Proposition 1: \(S_{in} \in \varLambda (\alpha D)\), and the convergence to the positive equilibrium is proved.
For the limiting case \(\alpha D = \mu (S_{in})\), either \(\lambda _{-}(\alpha D)=S_{in}\) when \(\mu (\cdot )\) is monotonic on the interval \([0,S_{in}]\) (then the washout is the only equilibrium), or \(\lambda _{-}(\alpha D)<S_{in}\) when \(\mu (\cdot )\) is non-monotonic. In this last situation, none of the cases of Proposition 1 are fulfilled. We show that for any initial condition such that \(X_{2}(0)>0\), the forward trajectory cannot converge to the washout equilibrium. From equations (6) one can write
If \(X_{2}(.)\) tends to \(0\), then one should have
for any finite positive \(T\). Using Taylor-Lagrange Theorem, there exists a continuous function \(\theta (.)\) in \((0,1)\) such that
with
One can then write
Note that \(S_{2}(.)\) tends to \(S_{in}\) when \(X_{2}(\cdot )\) tends to 0. So there exists \(T>0\) such that \(\tilde{S}_{2}(\tau )>\hat{S}\) for any \(\tau >T\), and accordingly to Assumption 1, there exist positive numbers \(a\), \(b\) such that \(-\mu ^{\prime }(\tilde{S}_{2} (\tau )) \in [a,b]\) for any \(\tau >T\). The following inequality is obtained
leading to a contradiction with (25). \(\square \)
Proof of Proposition 1
Let us consider the vector
whose dynamics is linear:
The matrix \(A\) is clearly Hurwitz and consequently \(Z\) converges exponentially towards \(0\) in forward time. Furthermore, variables \(S_{2}\) and \(X_{2}\) being non negative, one has also from (6) the following properties
and deduces that variables \(S_{1}\) and \(X_{1}\) stay also non negative in forward time. The definition of \(Z\) allows us to conclude that variables \(S_{1}, X_{1}, S_{2}, X_{2}\) are bounded.
From Eq. (6), the dynamics of the variable \(S_{1}\) can be written as an non-autonomous scalar equation:
When the initial condition of sub-system \((S_{2},X_{2})\) belongs to the attraction basin of the washout, the dynamics (26) is asymptotically autonomous with the limiting equation
From Theorem 2, we deduce that \(S_{1}\) converges to \(S_{1}^{\star }\), one of the zeros of the function
on the interval \([0,S_{in}]\), that are \(S_{in}\), \(\lambda _{-}(D/r)\) (if \(\lambda _{-}(D/r)<S_{in}\)) and \(\lambda _{+}(D/r)\) (if \(\lambda _{+}(D/r)<S_{in}\)). The Jacobian matrix of the whole dynamics (6) at steady state \((S_{1}^{\star },S_{in}-S_{1}^{\star },S_{in},0)\) in \((Z,S_{1},S_{2})\) coordinates is

When the attraction basin of the washout of the \((S_{2},X_{2})\) subsystem is not reduced to a singleton, one has necessarily \(\mu (S_{in})<\alpha D\) (see Lemma 2). Furthermore, one has \(f^{\prime }(S_{in})=\mu (S_{in})-D/r\) and \(f^{\prime }(S_{1}^{\star }) =-\mu ^{\prime }(S_{1}^{\star })(S_{in}-S_{1}^{\star })\) when \(S_{1}^{\star }< S_{in}\). So, apart two possible particular values of \(r\) that are such that \(r=D/\mu (S_{in})\) or \(\lambda _{-}(D/r)=\lambda _{+}(D/r)<S_{in}\), \(f^{\prime }(S_{1}^{\star })\) is non-zero and the equilibrium is thus hyperbolic. Finally, we conclude about the possible asymptotic behaviors of the whole dynamics as follows.
-
The washout equilibrium is attracting when \(\mu (S_{in})<D/r\). When \(\mu (S_{in})>D/r\), this equilibrium is a saddle (with a stable manifold of dimension one). Accordingly to the Theorem of the Stable Manifold, the trajectory solution cannot converges to such an equilibrium, excepted from a measure-zero subset of initial conditions.
-
When \(\lambda _{-}(D/r)<S_{in}\), the equilibrium with \(S_{1}^{\star }=\lambda _{-}(D/r)\) is always attracting.
-
When \(\lambda _{+}(D/r)<S_{in}\), the equilibrium with \(S_{1}^{\star }=\lambda _{+}(D/r)\) is a saddle (with a stable manifold of dimension one). Accordingly to the theorem of the Stable Manifold, the trajectory solution cannot converges to such an equilibrium, excepted from a measure-zero subset of initial conditions.
This finishes to prove the first point of the theorem.
When the initial condition of sub-system \((S_{2},X_{2})\) does not belong to the attraction basin of the washout, Proposition 1 ensures that \(S_{2}(t)\) converges towards a positive \(S_{2}^{\star }\) that is equal to \(\lambda _{-}(\alpha D)\) or \(\lambda _{+}(\alpha D)\). Then, Eq. (26) can be equivalently written as:
So the dynamics (28) is asymptotically autonomous with the limiting equation
From Theorem 2, we conclude that forward trajectories of the \((S_{1},X_{1})\) sub-system converge asymptotically either to a stationary point \((S_{1}^{\star },S_{in}-S_{1}^{\star })\) where \(S_{1}^{\star }\) is a zero of the function
on the interval \((0,S_{in})\), either to the washout point \((S_{in},0)\). We show that this last case is not possible. From Eq. (6), one has
and as \(X_{2}(t)\) converges to a positive value, we deduce that \(X_{1}(t)\) cannot converges towards \(0\).
The functions \(f_{r}\) being analytic for any \(r\), the roots \(S_{1}^{\star }\) are isolated. As for the proof of Proposition 2 we consider the function
that is analytic on its domain of definition and such that
This shows that, excepted for some isolated values of \(r\) in \((0,1)\), the zero of \(f_{r}\) are such that \(f_{r}^{\prime }(S_{1}^{\star })\ne 0\).
Let us now write the Jacobian matrix \(J^{\star }\) of dynamics (6) at steady state \(E^{\star }=(S_{1}^{\star }, S_{in}-S_{1}^{\star },S_{2}^{\star },S_{in}-S_{2}^{\star })\) in \((Z,S_{1},S_{2})\) coordinates:

Considering the following facts:
-
1.
\(A\) is Hurwitz,
-
2.
\(\varLambda (\alpha D)\ne \emptyset \) implies that \(S_{2}^{\star }\) is not equal to \(\hat{S}\). So one has \(\mu ^{\prime }(S_{2}^{\star })\ne 0\) (cf Assumption 1),
-
3.
\(f_{r}^{\prime }(S_{1}^{\star })\ne 0\) for almost any \(r\),
we conclude that any equilibrium \(E^{\star }\) is hyperbolic (for almost any \(r\)) and is
-
a saddle point when \(\mu ^{\prime }(S_{2}^{\star })>0\) or \(f_{r}^{\prime }(S_{1}^{\star })>0\),
-
an exponentially stable critical point otherwise.
Furthermore, the left endpoints of the connected components of the set \(\varGamma _{\alpha ,r}(D)\) are exactly the roots of \(f_{r}\) with \(f_{r}(S_{1}^{\star })<0\). Finally, from the Stable Manifold Theorem we conclude that, excepted from the stable manifolds of the saddle equilibria, the trajectory converges to an equilibrium that is such that \(S_{2}^{\star }=\lambda _{-}(\alpha D)\) and \(f_{r}(S_{1}^{\star })<0\). This ends the proof of the second point. \(\square \)
Proposition 3
Assume that the hypotheses 1 are fulfilled with \(\varLambda (D)\ne \emptyset \) and \(\lambda _{+}(D)<S_{in}\). There exist buffered configurations with an additional tank of volume \(V_{2}\) that possesses a unique globally exponentially stable positive equilibrium from any initial condition with \(S_{2}(0)>0,\) exactly when \(V_{2}\) fulfills the condition
where the functions \(\varphi (\cdot )\) and \(\psi (\cdot )\) are defined as follows:
and \({\bar{s}}\) is the number
The dilution rate \(D_{2} \in (0,\mu (S_{in}))\) has then to satisfy the condition
Furthermore\(,\) one has
Proof of Proposition 3
One can straightforwardly check on Eq. (5) that a positive equilibrium in the first tank has to fulfill
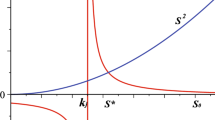
Let us examine some properties of the function \(\varphi \) on the interval \((0,S_{in})\):
-
1.
\(\varphi \) is negative exactly on the interval \(\varLambda (D)\),
-
2.
\(\varphi ^{\prime }\) is negative on \((0,\lambda _{-}(D))\) with \(\varphi (0)=S_{in}\) and \(\varphi (\lambda _{-}(D))=0\),
-
3.
\(\varphi (\lambda _{+}(D))=\varphi (S_{in})=0\) and \(\varphi \) reaches its maximum \(m^{+}\) on the sub-interval \((\lambda _{+}(D),S_{in})\), that is strictly less than \(S_{in}=\varphi (0)\),
from which we deduce that there exists a unique solution of \(\varphi (s)=c\) on the whole interval \((0,S_{in})\) exactly when \(c\in (m^{+},S_{in})\) (see Fig. 7 as an illustration).
The configurations for which there exists a unique \(S_{1}^{\star } \in (0,S_{in})\) solution of the Eq. (34) are exactly those that fulfill the condition \(D_{2}\frac{V_{2}}{V}(S_{in}-S_{2}^{\star }(D_{2}))\in (m^{+},S_{in})\), or equivalently
with \(D_{2} \in (0,\mu (S_{in}))\). Then, Theorem 1 with \(\alpha =D_{2}/D\) and \(r=1/(1+\frac{V_{2}}{V})\) guarantees that the unique positive equilibrium \((S^{\star }_{1}, S_{in}-S^{\star }_{1}, S^{\star }_{2}(D), S_{in}-S^{\star }_{2}(D))\) is globally exponentially stable on the domain \({\mathbb {R}}_{+}^{2} \times {\mathbb {R}}_{+}^{\star } \times {\mathbb {R}}_{+}\).
Among all such configurations, the infimum of \(V_{2}/V\) can be approached arbitrarily close when \(D_{2}\) is maximizing the function
on \([0,\mu (S_{in})]\), that exactly amounts to maximize the function \(\psi (\cdot )\) on the interval \([0,{\bar{s}}]\).
Finally, let \(s^{\star }\) be a minimizer of \(\varphi \) on \((\lambda _{+}(D),S_{in})\). One has \(\mu (s^{\star })>\mu (S_{in})=\mu ({\bar{s}})\) and can write
which leads to the inequality (33). \(\square \)

Illustration of the graph of the function \(\varphi \)
Rights and permissions
About this article

Cite this article
Rapaport, A., Haidar, I. & Harmand, J. Global dynamics of the buffered chemostat for a general class of response functions. J. Math. Biol. 71, 69–98 (2015). https://doi.org/10.1007/s00285-014-0814-7
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00285-014-0814-7