
Abstract
We present a method for constructing and assessing the stability of a geometrical reference frame for use in vertical crustal motion studies. Our approach exploits the fact that when we transform GPS velocity solutions from one reference frame (RF) to another one using a Helmert transformation, only the frame translation rate parameters produce significant changes in the vertical station velocities expressed in the final RF. Loosely speaking, one can select and impose a ‘vertical RF’ from an ensemble of candidate frames, without any reference to the ‘horizontal RF’ (which can be selected and imposed afterwards), by seeing how the frame translation rates vary as one moves across the ensemble of frames. We order this ensemble according to the number of stations, N, incorporated into the set VREF whose RMS vertical motion is minimized in order to realize each frame. The value of N controls the level of scatter in, and hence the degree of similarity between the vertical velocities of the stations composing VREF. We characterize a specific vertical RF as stable if all of the frames located in a large neighborhood of the ensemble which includes the specific frame are characterized by very small relative frame translation rates. In this case, the expression of vertical GPS station velocities in any of these frames would lead to very similar results. We present a case study using a very large global time series in which we find a large RF neighborhood in which vertical station velocities are globally stable at the \(\sim \)0.2 mm/year level, and a slightly smaller neighborhood in which vertical stability improves to \(\sim \)0.1 mm/year level in polar regions.



Similar content being viewed by others
References
Altamimi Z, Collilieux X, Métivier L (2011) ITRF2008: an improved solution of the International Terrestrial Reference Frame. J Geod 85:457–473. doi:10.1007/s00190-011-0444-4
Argus DF (2007) Defining the translational velocity of the reference frame of Earth. Geophys J Int 169:830–838. doi:10.1007/s00190-011-0444-4
Argus DF, Blewitt G, Peltier WR, Kreemer C (2011) Rise of the Ellsworth mountains and parts of the East Antarctic coast observed with GPS. Geophys Res Lett 38:L16303. doi:10.1029/2011GL048025
Bevis M (1986) The curvature of Wadati-Benioff zones and the torsional rigidity of subducting plates. Nature 323:52–53
Bevis M et al (2012) Bedrock displacements in Greenland manifest ice mass variations, climate cycles and climate change. Proc Natl Acad Sci. doi:10.1073 /pnas.1204664109
Boucher C, Altamimi Z, Sillard P (1998) Results and analysis of the ITRF96, Tech Note 24. Int Earth Rot Serv, Paris, p 166
Davies P, Blewitt G (2000) Methodology for global geodetic time series estimation: a new tool for geodynamics. J Geophys Res 105:11083–11100.
Hofmann-Wellenhof B, Lichtenegger H, Collins J (2001) Global Positioning System: theory and practice. Springer, New York p389
Herring T, King R, McClusky S (2010) GAMIT and GLOBK Reference Manuals, Release 10.4, Massachusetts Institute of Technology, Cambridge
Kendrick E, Bevis M, Smalley R, Brooks B (2001) An integrated crustal velocity field for the Central Andes. Geochem Geophys Geosyst 2, paper 2001GC000191
Sella GF, Stein S, Dixon TH, Craymer M, James TS, Mazzotti S, Dokka RK (2007) Observation of glacial isostatic adjustment in “stable” North America with GPS. Geophys Res Lett 34:L02306. doi:10.1029/2006GL027081
Wöppelmann G, Letetrel C, Santamaria A, Bouin M-N, Collilieux X, Altamimi Z, Williams SDP (2009) Rates of sea-level change over the past century in a geocentric reference frame. Geophys Res Lett 36:L12607. doi:10.1029/2009GL038720
Acknowledgments
This research was funded by the US National Science Foundation through grants ARC-1111882 and EAR-0911611. We thank Donald Argus and two anonymous reviewers for many useful suggestions concerning this article—their remarks prompted the addition of the two appendices. We also thank Associate Editor Peter Clarke for his efforts.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Lack of evidence for a significant drift in the scale of our GPS solutions
In this appendix we provide support for our position that there is no need to estimate a scale rate parameter in the similarity transformations that we use to estimate station positions and velocities, or to transform these velocities so as to express them in a preferred GRF. The time series produced by our geodetic analysis consists of one global polyhedron of GPS stations per day. We estimate our orbital solutions (which are relaxed from earlier IGS solutions) on a daily basis, and do this in such a way that the errors attending each daily solution for the polyhedron are nearly independent of those on the previous or following day. We routinely monitor the repeatability of the polyhedron from one day to the next, or more strictly the RMS difference between the coordinates of the two sub-polyhedra composed of all stations common to both days after these polyhedra have been aligned via an H6 transformation (i.e., we are comparing the shape and size of these polyhedra, and not their position or orientation). This practice is one of several tools we use for identifying problems in the daily processing of the raw GPS data.
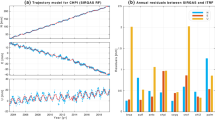
It is a simple matter to repeat this analysis with a daily H7 transformation that also estimates an apparent change of scale of the polyhedron from one day to the next. We have done this in order to search for apparently significant changes in scale during the total time period of our analysis. We pool all such scale change estimates and examine their distribution in Fig. 4a. The actual distribution is represented by the histogram, and the nearest or best fitting normal distribution is depicted by the red curve. The mean daily scale change estimate is \(-1.9 \times 10^{-12}\), and the standard deviation (SD) is \(1.7 \times 10^{-10}\). The distribution is very nearly symmetric about its mean, and the question naturally arises as to whether or not the mean scale change is significantly different from zero. We can answer this by treating the distribution as nearly normal or Gaussian, and computing a standard error for the estimated mean in standard fashion. This leads us to conclude that the mean daily scale change is \((-1.9\pm 2.3) \times 10^{-12}\) and that it is not significantly different from zero. The time series of daily scale change estimates maintains its near-symmetry about zero throughout the analysis period, but the scatter tends to increase as we go back in time and the size of the global GPS network is decreasing and positioning performance degrades (Fig. 4b). A standard autocorrelation analysis indicates that daily scale change estimates are only very weakly correlated from one day to the next. These findings suggest that daily scale change estimates are simply absorbing nearly-random measurement noise in the daily estimates of polyhedron geometry. We cannot find any compelling evidence for a systematic change in scale from day to day, or year to year.

a A histogram depicting the distribution of daily scale change estimates produced using the entire geodetic time series (see Fig. 1), and the normal distribution (red curve) obtained using the sample mean and SD. b The daily scale change estimates plotted as a time series
This conclusion is supported by the fact that within the stable neighborhood of Fig. 2, all the nearly-equivalent VRFs produce vertical velocity distributions which are nearly symmetrical about zero. This would not be the case if the scale or metric of the GPS system was drifting in time at an obvious rate, since this would produce a pronounced tendency for all GPS stations to move upwards or downwards according to the sign of the scale rate parameter. As a specific illustration, we depict the vertical velocity distribution of all 761 GPS stations that served as candidate members for VREF (Fig. 5). In our judgment, all of these stations have good or very good velocity solutions. The histogram represents the actual distribution of vertical velocity, while the red curve indicates the normal distribution implied by the sample mean (\(-0.08\) mm/year) and sample SD (1.54 mm/year). Clearly, the vertical velocity distribution is not nearly Gaussian or normal in character. But the observed distribution is nearly symmetrical about zero. If there were a scale drift of \(0.08\pm 0.01\) ppb/year, as estimated by Altamimi et al. (2011), in our GPS time series then our assumption of zero scale rate would have generated a global velocity ‘bias’ of magnitude 0.51 \(\pm \) 0.06 mm/year. This is six times larger than the central value of the actual velocity distribution (Fig. 5). We note that the very small deviation of the observed mean vertical velocity from zero might easily arise from the fact that our GPS stations only sample land masses, and do this non-uniformly, and there is no particular reason to suppose that mean value of the actual vertical crustal velocity field sampled at these GPS stations should exactly equate to zero. Of course, this logic is double-edged and it implies that one cannot rule out scale change rates which are very small indeed (say 0.01 ppb/year or less).But we see no need to complicate our geodetic analysis by invoking a correction for an artifact for which we can find no compelling or even plausible evidence.

The vertical velocity distribution of 761 GPS stations, all of which are thought to have high or very high-quality velocity solutions, as expressed in the vertical velocity frame VREF(575). The histogram depicts the actual distribution, whereas the red curve indicates thenormal or Gaussian distribution implied by the sample mean and variance. Clearly the actual vertical velocity distribution is distinctly non-Gaussian. But it is very nearly symmetrical around zero
This conclusion should not be taken as a criticism of Altamimi et al. (2011) who had to combine measurements obtained from multiple geodetic measurement systems, which are known to have scale differences, and whose ‘mixing ratio’ was changing over the time period of study. Furthermore, their underlying GPS time series was produced by averaging the solutions obtained by multiple IGS analysis centers. In contrast, we used data from a single measurement system (GPS), and analyzed it ourselves using a strictly homogeneous procedure.
A further qualification of our finding of scale stability is that it applies to a time series that begins in 1995. Geodesists working with GPS time series that began several years earlier may have been strongly affected by the transition from Block I to Block II satellites, which may explain their need to embrace scale changes. We also acknowledge that establishing that scale is stable in our time series does not imply that there is no scale bias. But a modest scale bias which is constant in time is of little concern to geophysicists, like us, who focus on crustal displacement and earth deformation.
Appendix 2: On the coupling between HREF and the final vertical GPS velocity distribution
In this appendix, we address the extent to which the ‘fixing’ of the HREF stations perturbs the vertical velocities of all GPS stations from those values encountered and adopted at the end of the search for an optimal VREF. Recall that the original search for VREF took place using velocity solutions originally expressed in ITRF2008. The way in which we subsequently shift our RF so as to ‘fix’ to a given plate, is to find a transformation that minimizes the horizontal velocities of the stations in set HREF, which are located in the stable interior of the target plate. The very notion of ‘fixing’ a plate derives from the assumption that plates (or at least their stable interiors) move about the surface of the earth as essentially rigid objects. This is an axiom of the kinematical theory of plate tectonics, but it is strictly applicable only on a spherical earth, because if the curvature of a plate changes as it moves north or south, then by necessity it must accumulate membrane strains (Bevis 1986). This requirement is usually ignored, however, because the errors attending its violation are typically so small as to be negligible.
If the earth’s surface were truly spherical, then the two components of an H6 transformation operating in rate or velocity space would be mathematically distinct in that the three frame translation rate parameters (constituting a translation rate vector) would produce both vertical and horizontal changes to the GPS velocities, whereas the three frame rotation rate parameters (constituting a rotation rate vector, often referred to as an Euler vector) would produce purely horizontal velocity changes. That is, the global velocity field associated with an Euler vector is everywhere tangential to the geosphere, and it has no vertical component. This absolute distinction between the effects of frame rotation and frame translation breaks down if the earth is not spherical. But we now show that in practice this breakdown produces effects of negligible amplitude.
Of course, when an Eulerian transformation is applied on the real (oblate) earth so as to transform a set of GPS station velocities, the velocity (or velocity perturbation) it produces at any given GPS station is still tangential to a geocentric sphere passing through that station, but, in general, this tangent plane is not parallel to the tangent plane at the nearest point on the ellipsoid. The ellipsoid has a local slope relative to the sphere, with its maximum gradients in the north or south directions, and zero gradient to the east and west. This gradient corresponds to the angular difference \({\delta \phi }\) between the geodetic and geocentric latitudes of the GPS station, which is identical to the angle between radial up and ellipsoid-normal up. As a result, the northern component \(v_{n}\) of the velocity vector expressed in the tangent plane to the sphere has a vertical component \(v_{u}\) in a local Cartesian coordinate system attached to the ellipsoid (i.e., in the topocentric system in which up is normal to the ellipsoid). If \(\delta \phi \) is expressed in radians, then
Another way to characterize this ‘coupling’ is to note that the global velocity field associated with an Euler vector (i.e., with the frame rotation rate) has no radial component, but does have an ellipsoid-normal component (except at the equator and the poles). And in geodesy, it is the ellipsoid-normal that serves to define ‘up’.
To a very good approximation \(\delta \phi =f\) sin(2\(\phi )\), where \(f\) is the flattening of the ellipsoid, so the extreme values of \(\delta \phi \) occur at latitudes of \(\pm 45^{\circ }\), where \(\delta \phi =\pm \quad f\), and \(\delta \phi \) declines to zero at the equator and either pole. Since \(f \sim \)1/298, it follows that \({\vert }\) \(v_{u}\) \({\vert }\) \(\ll \) \({\vert }\) \(v_{n}\) \({\vert }\). It is also important to note that \(v_{n}\) is just the north component of the velocity vector (associated with the Euler vector) at each GPS station, which is typically smaller and sometimes much smaller than the magnitude of the complete velocity vector, when this comparison is made all over the globe. This means the vertical velocity perturbations associated with minimizing the horizontal velocities of the stations in HREF are very small, and the vertical velocity distribution at the set of all GPS stations is dominated by the selection of VREF.
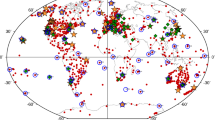
We illustrate this conclusion by showing the distribution of vertical velocities at the 761 candidate GPS stations for VREF as expressed in 5 different GRFs all of which invoke our preferred VREF, i.e., VREF(575), but involve different choices for HREF. The various HREFs attempt to fix different plates, or portions of a single plate. In one case HREF =AUST, comprising many stations in Australia plus one in New Caledonia, all of which reside in the eastern part of the Australian plate. This choice is expected to produce the biggest vertical velocity perturbations because the Australian plate has by far the largest north component of velocity of any major plate in the No Net Rotation (NNR) plate model NNR-NUVEL-1A on which ITRF2008 is partly based, so fixing this particular plate will provoke the largest possible perturbations of \(v_{n}\) (and thus \(v_{u}\); see Eq. 1). Two other choices for HREF, GNET (Greenland) and ALSK (associated with the extreme northwest portion of the North American plate), are expected to produce close to the greatest contrast with AUST in that these regions have near zero or negative northcomponents of plate velocity in an NNR frame. (Significant southward components of plate motion are rare in NNR NUVEL-1A and ITRF2008.) The impact of the various choices for HREF on the final distribution of vertical velocity at the GPS stations is shown in Fig. 6, which also lists the RMS vertical velocity associated with each choice of HREF. This statistic varies at the level \(\sim \)0.01 mm/year, about two orders of magnitude smaller than the RMS velocity itself, and nearly one order of magnitude smaller than the translational instability of the RF within the stable neighborhood of the ensemble (Fig. 2).

The impact of HREF on the final vertical velocity distribution. The histograms show the distribution of the up component of velocity at 761 stations expressed in five different RFs. Each RF is defined using VREF =VREF(575), but using different HREFs. The RF names and the region or plate which they ‘fix’ horizontally are GNET Greenland, ALSK stable portions of NE Siberia, Alaska and immediately adjacent NW Canada, ANET East Antarctica, SOAM stable South America, AUST Australia. The 761 stations chosen for this experiment are those shown (in red or blue) in Fig. 3. The RMS vertical velocity in each RF is listed in the key
This finding justifies our assertion that we can choose VREF, and thus the ‘vertical RF’, before and without any reference to HREF and the ‘horizontal RF’ (which can be selected and imposed afterwards). But in the event that the tiny perturbations produced on the vertical velocity distribution are troubling in certain applications (or perhaps to Australians), it would be a simple matter to impose a constant choice of HREF while searching for an optimum VREF using essentially the same procedure illustrated in Fig. 2. We choose not to do this, because it makes very little difference to the final result (especially outside of Australia), and because we find it convenient to select a preferred VREF and then ‘share’ it between different GRFs (e.g., those we produce for Greenland, stable South America and Antarctica). This encourages us to think very carefully about VREF and the vertical velocity frame, and then think very carefully about the various sets HREF and the horizontal velocity frame, secure in the knowledge that there is no significant ‘cross-talk’ between those two processes.
Rights and permissions
About this article
Cite this article
Bevis, M., Brown, A. & Kendrick, E. Devising stable geometrical reference frames for use in geodetic studies of vertical crustal motion. J Geod 87, 311–321 (2013). https://doi.org/10.1007/s00190-012-0600-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00190-012-0600-5