
Abstract
The gamma model is a generalized linear model for gamma-distributed outcomes. The model is widely applied in psychology, ecology or medicine. Recently, Gaffke et al. (J Stat Plan Inference 203:199–214, 2019) established a complete class and an essentially complete class of designs for gamma models to obtain locally optimal designs in particular when the linear predictor includes an intercept term. In this paper we extend this approach to gamma models having linear predictors without intercept. For a specific scenario sets of locally D- and A-optimal designs are established. It turns out that the optimality problem can be transformed to one under gamma models with intercept leading to a reduction in the dimension of the experimental region. On that basis optimality results can be transferred from one model to the other and vice versa. Additionally by means of the general equivalence theorem optimality can be characterized for multiple regression by a system of polynomial inequalities which can be solved analytically or by computer algebra. Thus necessary and sufficient conditions can be obtained on the parameter values for the local D-optimality of specific designs. The robustness of the derived designs with respect to misspecification of the initial parameter values is examined by means of their local D-efficiencies.




Similar content being viewed by others

References
Atkinson AC, Woods DC (2015) Designs for generalized linear models. In: Dean A, Morris M, Stufken J, Bingham D (eds) Handbook of design and analysis of experiments. Chapman & Hall/CRC Press, Boca Raton, pp 471–514
Burridge J, Sebastiani P (1992) Optimal designs for generalized linear models. J Ital Stat Soc 1:183–202
Burridge J, Sebastiani P (1994) D-optimal designs for generalised linear models with variance proportional to the square of the mean. Biometrika 81:295–304
Chatterjee S (1988) Sensitivity analysis in linear regression. Wiley, New York
Ford I, Torsney B, Wu CFJ (1992) The use of a canonical form in the construction of locally optimal designs for non-linear problems. J R Stat Soc Ser B (Methodol) 54:569–583
Gaffke N, Idais O, Schwabe R (2019) Locally optimal designs for gamma models. J Stat Plan Inference 203:199–214
Gea-Izquierdo G, Cañellas I (2009) Analysis of holm oak intraspecific competition using gamma regression. For Sci 55:310–322
Gregori D, Pagano E, Merletti F, Petrinco M, Bo S, Desideri A (2011) Regression models for analyzing costs and their determinants in health care: an introductory review. Int J Qual Health Care 23:331–341
Grover G, Sabharwal ASA, Mittal J (2013) An application of gamma generalized linear model for estimation of survival function of diabetic nephropathy patients. Int J Stat Med Res 2:209–219
Hardin JW, Hilbe JM (2018) Generalized linear models and extensions, 4th edn. Stata Press, Texas
Harman R, Trnovská M (2009) Approximate D-optimal designs of experiments on the convex hull of a finite set of information matrices. Math Slov 59:693–704
Kilian R, Matschinger H, Löeffler W, Roick C, Angermeyer MC (2002) A comparison of methods to handle skew distributed cost variables in the analysis of the resource consumption in schizophrenia treatment. J Mental Health Policy Econ 51:21–31
Kurtoğlu F, Özkale MR (2016) Liu estimation in generalized linear models: application on gamma distributed response variable. Stat Pap 57:911–928
McCrone P, Knapp M, Fombonne E (2005) The Maudsley long-term follow-up of child and adolescent depression. Eur Child Adolesc Psychiatry 14:407–413
McCullagh P, Nelder J (1989) Generalized linear models, 2nd edn. Chapman & Hall, London
Montez-Rath M, Christiansen CL, Ettner SL, Loveland S, Rosen AK (2006) Performance of statistical models to predict mental health and substance abuse cost. BMC Med Res Methodol 6:53–63
Ng VK, Cribbie RA (2017) Using the gamma generalized linear model for modeling continuous, skewed and heteroscedastic outcomes in psychology. Curr Psychol 36:225–235
R Core Team (2019) R: A language and environment for statistical computing. R Foundation for Statistical Computing, Vienna
Radloff M, Schwabe R (2016) Invariance and equivariance in experimental design for nonlinear models. In: Kunert J, Müller CH, Atkinson AC (eds) mODa 11-Advances in model-oriented design and analysis. Springer, Berlin, pp 217–224
Silvey SD (1980) Optimal design. Chapman & Hall, London
Wenig CM, Schmidt CO, Kohlmann T, Schweikert B (2009) Costs of back pain in germany. Eur J Pain 13:280–286
Wolfram Research, Inc. (2018) Mathematica. Wolfram Research, Inc., Champaign
Yu Y (2010) Monotonic convergence of a general algorithm for computing optimal designs. Ann Stat 38:1593–1606
Acknowledgements
The authors are thankful to Prof. Dr. Norbert Gaffke for many helpful discussions and suggestions. The work of the first author was supported by a scholarship of the state of Saxony-Anhalt.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
Lemma
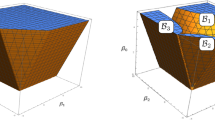
Consider a two-factor gamma model with intercept such that \(\varvec{f}(\varvec{x})=(1, x_1, x_2)^\mathsf{T}\) on the experimental region \(\mathcal {X}=[a,b]^2\), \(a,b \in \mathbb {R}\), \(a<b\) with the intensity function \(u(\varvec{x},\varvec{\beta })=1/(\beta _0+\beta _1x_1+\beta _2x_2)^2\). The vertices of \(\mathcal {X}\) are given by \((a,a)^\mathsf{T}\), \((b,a)^\mathsf{T}\), \((a,b)^\mathsf{T}\) and \((b,b)^\mathsf{T}\) with the corresponding intensities \(u_1=1/(\beta _0+\beta _1\,a+\beta _2\,a)^2\), \(u_2=1/(\beta _0+\beta _1\,b+\beta _2\,a)^2\), \(u_3=1/(\beta _0+\beta _1\,a+\beta _2\,b)^2\) and \(u_4=1/(\beta _0+\beta _1\,b+\beta _2\,b)^2\). Let \(\varvec{\beta }=(\beta _0,\beta _1,\beta _2)^\mathsf{T}\) be a parameter point such that \(\varvec{f}^\mathsf{T}(\varvec{x})\varvec{\beta }>0\) for all \(\varvec{x}\in \mathcal {X}\), or equivalently, \(\beta _0+\beta _1\,a+\beta _2\,a>0\), \(\beta _0+\beta _1\,b+\beta _2\,a>0\), \(\beta _0+\beta _1\,a+\beta _2\,b>0\) and \(\beta _0+\beta _1\,b+\beta _2\,b>0\). Then the unique locally D-optimal design \(\xi ^*\) (at \(\varvec{\beta }\)) is as follows.
-
(i)
If \(u_{(1)}^{-1}\,\ge u_{(2)}^{-1}+u_{(3)}^{-1}+u_{(4)}^{-1}\) then \(\xi ^*\) is a three-point design supported by the three vertices whose intensity values are given by \(u_{(2)}\), \(u_{(3)}\), \(u_{(4)}\), with equal weights 1 / 3.
-
(ii)
If \(u_{(1)}^{-1}\,< u_{(2)}^{-1}+u_{(3)}^{-1}+u_{(4)}^{-1}\) then \(\xi ^*\) is a four-point design supported by the four vertices \((a,a)^\mathsf{T}\), \((b,a)^\mathsf{T}\), \((a,b)^\mathsf{T}\), \((b,b)^\mathsf{T}\) with corresponding weights \(\omega _1^*,\,\omega _2^*,\,\omega _3^*,\,\omega _4^*\,>0\) and \(\sum _{k=1}^4\omega _k^*=1\).
Proof
The proof can be demonstrated by making use of the results of Gaffke et al. (2019) who derived the D-optimal designs for a gamma model with intercept on the standardized experimental region \(\mathcal {Z}=[0,1]^2\). To this end, denote \(\varvec{f}_{\varvec{\beta }}(\varvec{x})=(\varvec{f}^\mathsf{T}(\varvec{x})\varvec{\beta })^{-1}\varvec{f}(\varvec{x})\) so we have \(\varvec{M}(\varvec{x},\varvec{\beta })=\varvec{f}_{\varvec{\beta }}(\varvec{x})\varvec{f}_{\varvec{\beta }}^\mathsf{T}(\varvec{x})\). Based on equivariance (see Radloff and Schwabe 2016) a D-optimal design \(\xi ^*\) on \(\mathcal {X}\) given in the lemma can be derived by transformation of a respective D-optimal design \(\xi ^{**}\) on \(\mathcal {Z}=[0,1]^2\). Here, \(\textstyle {x_j\rightarrow z_j=\frac{x_j}{b-a}-\frac{a}{b-a},j=1,2}\). For the transformation matrix

we have \(\textstyle \varvec{f}(\varvec{z})=\varvec{B}\varvec{f}(\varvec{x})=(1,z_1,z_2)^\mathsf{T}\) with \(\textstyle \varvec{\tilde{\beta }}=\big (\varvec{B}^\mathsf{T}\big )^{-1}\varvec{ \beta }=(\tilde{\beta }_0,\,\tilde{\beta }_{1},\,\tilde{\beta }_{2})^\mathsf{T}\) where \(\textstyle \tilde{\beta }_0=\beta _0+(-a/(b-a))\,(\beta _1+\beta _2)\) , \(\textstyle \tilde{\beta }_{1}=\beta _1(1/(b-a))\) and \(\textstyle \tilde{\beta }_{2}=\beta _2(1/(b-a))\). It follows that \(\textstyle \varvec{f}_{\varvec{\tilde{\beta }}}(\varvec{z})=\bigl (\varvec{f}^\mathsf{T}(\varvec{z})\varvec{\tilde{\beta }}\bigr )^{-1}\varvec{f}(\varvec{z})\) and the information matrix is given by \(\textstyle \varvec{\tilde{M}}(\varvec{z},\varvec{\tilde{\beta }})=\varvec{f}_{\varvec{\tilde{\beta }}}(\varvec{z})\varvec{f}_{\varvec{\tilde{\beta }}}^\mathsf{T}(\varvec{z})\). It is easily seen that \(\varvec{M}(\varvec{x},\varvec{\beta }) =\varvec{B}^{-1}\varvec{\tilde{M}}(\varvec{z},\varvec{\tilde{\beta }})\varvec{B}^{-1}\), thus the derived D-optimal designs on \(\mathcal {X}\) and \(\mathcal {Z}\), respectively are equivariant. Then the results follow from Theorem 4.2 in Gaffke et al. (2019). \(\square \)
Proof of Theorem 3.3
First we give an outline of the proof. The proof is obtained by making use of the condition of the equivalence theorem (Theorem 2.1, part (a)). By that we develop a system of feasible inequalities evaluated at the vertices \(\varvec{v}_i\) for all \(i=1,\ldots ,8\). For simplification of presentation in the case \(\beta _1\ne 0\) we use the ratio \(\gamma =\beta /\beta _1\) for which the range is given by \((-\infty ,-1)\cup (-1/4,\infty )\). It turns out that some of the inequalities are implied by some others and thus the resulting system is reduced to an equivalent system of only a few inequalities. The intersection of the set of solutions of the system with the range of \(\gamma \) leads to the optimality condition (subregion) of the corresponding optimal design. For minimally supported designs given in cases (i), (ii), (iv) we display the \(3\times 3\) design matrix \(\varvec{F}\), its inverse \(\varvec{F}^{-1}\) and the \(3\times 3\) weight matrix \(\varvec{V}\). Note that for \(\beta _1\ne 0\) the intensities \(u_i=u(\varvec{v}_i,\varvec{\beta }), i=1,\ldots , 8\) are equal to \(u_{1}=\beta _1^{-2}\big (1\,+2\,\gamma \big )^{-2}\), \(u_{2}=\beta _1^{-2}\big (2\,+2\,\gamma \big )^{-2}\), \(u_{3}=u_{4}=\beta _1^{-2}\big (1+3\,\gamma \big )^{-2}\), \(u_{5}=\beta _1^{-2}\big (1+4\,\gamma \big )^{-2}\), \(u_{6}=u_{7}=\beta _1^{-2}\big (2+3\,\gamma \big )^{-2}\), \(u_{8}=\beta _1^{-2}\big (2+4\,\gamma \big )^{-2}\), respectively.
Proof of part (i): The \(3\times 3\) design matrix \(\varvec{F}=[\varvec{v}_2, \varvec{v}_3,\varvec{v}_4]^\mathsf{T}\) is given by
Hence, the condition of the equivalence theorem is given by
For the case \(\beta >0\), \(\beta _1= 0\), condition (6.3) is equivalent to
which is independent of \(\beta \) and is satisfied for all vertices \(\varvec{v}_i\) for all \(i=1,\ldots ,8\) and equality holds for the support. For the other cases, i.e., \(\beta \ge -3\beta _1\), \(\beta _1< 0\) or \(\beta > \beta _1/5\), \(\beta _1>0\) condition (6.3) is equivalent to
By some lengthy but straightforward calculations, the above inequalities can be reduced to
where the first inequality comes from vertex \(\varvec{v}_5\) and the second inequality comes from the vertices \(\varvec{v}_6\) and \(\varvec{v}_7\). The l.h.s. of each inequality is a polynomial in \(\gamma \) of degree 2 and the sets of solutions are given by \((-\infty ,-1/3]\cup [1/5,\infty )\) and \((-\infty ,-3]\cup [-1/3,\infty )\), respectively. Note that the bounds are the roots of the respective polynomials. Hence, by considering the intersection of both sets with the range of \(\gamma \), the design \(\xi _1^*\) is locally D-optimal if \(\gamma \in (-\infty ,-3]\cup [1/5,\infty )\) which is equivalent to the optimality subregion \(\beta \ge -3\beta _1\), \(\beta _1< 0\) or \(\beta > \beta _1/5\), \(\beta _1>0\) given in part (i) of the theorem.
Proof of part (ii): The \(3\times 3\) design matrix \(\varvec{F}=[\varvec{v}_3, \varvec{v}_4,\varvec{v}_5]^\mathsf{T}\) is given by
Hence, the condition of the equivalence theorem is equivalent to
and similar to part (i) the above inequalities reduce to
which arises from vertex \(\varvec{v}_2\). The set of solutions of the polynomial determined by the l.h.s. is given by \([-1/3,-5/23]\). By considering the intersection with the range of \(\gamma \), the design \(\xi _2^*\) is locally D-optimal if \(\gamma \in (-1/4,-5/23]\).
Proof of part (iii): Consider design \(\xi _3^*\). Let the associated weights be denoted as \(\omega _2^*=(5+23\,\gamma )/(16\,(1+4\,\gamma ))\), \(\omega _3^*=\omega _4^*=9\,(1+3\gamma )^2/(32\,(1+\gamma )(1+4\,\gamma ))\), \(\omega _5^*=(1-\gamma -20\,\gamma ^2)/(8\,(1+\gamma )(1+4\,\gamma ))\) where \(\gamma =\beta /\beta _1\). Note that \(\omega _2^*>0\) for all \(\gamma >-5/23\), \(\omega _3^*=\omega _4^*>0\) for all \(\gamma \in \mathbb {R}\) and \(\omega _5^*>0\) for all \(\gamma \in (-1/4,1/5)\), and it is obvious that \(\omega _2^*,\omega _3^*,\omega _5^*\) are positive over the interval \((-5/23,1/5)\) and satisfy \(\omega _2^*+\omega _3^*+\omega _4^*+\omega _5^*=1\). The \(4\times 3\) design matrix is given by \(\varvec{F}=[\varvec{v}_2, \varvec{v}_3,\varvec{v}_4,\varvec{v}_5]^\mathsf{T}\) with weight matrix \(\varvec{V}=\mathrm {diag}\big (s_{2},s_{3},s_{4},s_{5}\big )\) where \(s_{i}=\omega _{i}^*u_{i}, i=2,3,4,5\) and \(s_{3}=s_{4}\). The information matrix is given by
and hence \(\det \varvec{M}\bigl (\xi _3^*, \varvec{\beta }\bigr )=16\,s_{2}\,s_{3}^{2}+18\,s_{2}\,s_{3}\,s_{5}+s_{3}^{2}s_{5}\). Define the following quantities
Then the inverse of the information matrix is given by
Hence, the condition of the equivalence theorem can be rewritten as
which is equivalent to the following system of inequalities
where the first inequality arises form the vertices \(\varvec{v}_1\) and \(\varvec{v}_8\) and the second inequality comes from the vertices \(\varvec{v}_6\) and \(\varvec{v}_7\). Because of the complexity of the system above we employed computer algebra using Wolfram Mathematica 11.3 (see Wolfram Research, Inc. 2018) to obtain the set of solutions for \(\gamma \) as given in part (iii).
Proof of part (iv): The \(3\times 3\) design matrix \(\varvec{F}=[\varvec{v}_2, \varvec{v}_6,\varvec{v}_7]^\mathsf{T}\) is given by
The condition of the equivalence theorem is equivalent to
and the above inequalities reduce to
where the first inequality arises form the vertices \(\varvec{v}_3\) and \(\varvec{v}_4\) and the second inequality comes from vertex \(\varvec{v}_8\). In analogy to parts (i) and (ii) the sets of solutions are given by \([-1.2,-2/3]\) and \([-2,-2/3]\), respectively where the bounds are the roots of the respective polynomials. Hence, by considering the intersection of both sets with the range of \(\gamma \), the design \(\xi _4^*\) is locally D-optimal if \(\gamma \in [-1.2,-1)\). \(\square \)
Rights and permissions
About this article

Cite this article
Idais, O., Schwabe, R. Analytic solutions for locally optimal designs for gamma models having linear predictors without intercept. Metrika 84, 1–26 (2021). https://doi.org/10.1007/s00184-019-00760-3
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00184-019-00760-3