
Abstract
In this paper, we focus on a particular type of coherent system which may fail either on the failure of its first component or on the failure of its second component. We investigate the renewal of such a coherent system using two cold standby components. We obtain the reliability function of the considered coherent system which is equipped with two cold standby components. We study the problem to optimize the reliability of the system. Some stochastic ordering results are also presented. Examples are provided to illustrate the theoretical results presented in this study. Our results subsume some of the earlier results in the literature.







Similar content being viewed by others

References
Arriaza A, Navarro J, Suárez-Llorens A (2018) Stochastic comparisons of replacement policies in coherent systems under minimal repair. Nav Res Logist 65(6–7):550–565
Asadi M, Berred A (2012) On the number of failed components in a coherent operating system. Stat Probab Lett 82(12):2156–2163
Boland PJ (2001) Signatures of indirect majority systems. J Appl Probab 38(2):597–603
Eryilmaz S (2012) On the mean residual life of a k-out-of-n: G system with a single cold standby component. Eur J Oper Res 222(2):273–277
Eryilmaz S (2014a) A new look at dynamic behavior of binary coherent system from a state-level perspective. Ann Oper Res 212(1):115–125
Eryilmaz S (2014b) A study on reliability of coherent systems equipped with a cold standby component. Metrika 77(3):349–359
Eryilmaz S (2017) The effectiveness of adding cold standby redundancy to a coherent system at system and component levels. Reliab Eng Syst Saf 165:331–335
Khaledi BE, Shaked M (2007) Ordering conditional lifetimes of coherent systems. J Stat Plan Inference 137(4):1173–1184
Mahmoudi M, Asadi M (2011) The dynamic signature of coherent systems. IEEE Trans Reliab 60(4):817–822
Mirjalili A, Sadegh MK, Rezaei M (2017) A note on the mean residual life of a coherent system with a cold standby component. Commun Stat Theory Methods 46(20):10348–10358
Navarro J, Rubio R (2009) Computations of signatures of coherent systems with five components. Commun Stat Simul Comput 39(1):68–84
Navarro J, Samaniego FJ, Balakrishnan N (2011) Signature-based representations for the reliability of systems with heterogeneous components. J Appl Probab 48(3):856–867
Samaniego FJ (2007) System signatures and their applications in engineering reliability, vol 110. Springer, Berlin
Van Gemund AJ, Reijns GL (2012) Reliability analysis of \( k \)-out-of-\( n \) systems with single cold standby using pearson distributions. IEEE Trans Reliab 61(2):526–532
Wang Y (2016) Conditional k-out-of-n systems with a cold standby component. Commun Stat Theory Methods 45(21):6253–6262
Acknowledgements
The authors would like to thank the editor, the associate editor and the anonymous referees for the useful suggestions which helped improve the presentation of the paper to a great extent. The first author would also like to thank Indian Institute of Technology Kharagpur for the financial assistance.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
Proof of Theorem 2
The reliability function of a coherent system with two cold standby components can be written as
Using Eq. (4) of Eryilmaz (2014b), we can write
Next, consider the conditional probability in (19),
Therefore, using Eqs. (20) and (21) in (19), we have Eq. (4). \(\square \)
Proof of equation (13)
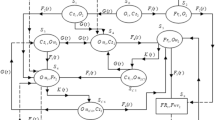
By the definition of five-component bridge system,
\(\square \)
Rights and permissions
About this article

Cite this article
Roy, A., Gupta, N. Reliability of a coherent system equipped with two cold standby components. Metrika 83, 677–697 (2020). https://doi.org/10.1007/s00184-019-00752-3
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00184-019-00752-3