
Abstract
In this paper, the problem of synchronization of a class of spatiotemporal fractional-order partial differential systems is studied. Subject to homogeneous Neumann boundary conditions and using fractional Lyapunov approach, nonlinear and linear control schemes have been proposed to synchronize coupled general fractional reaction–diffusion systems. As a numerical application, we investigate complete synchronization behaviors of coupled fractional Lengyel–Epstein systems.
Similar content being viewed by others

1 Introduction
The phenomenon of synchronization has attracted the interest of many researchers from various fields due to its potential applications in nonlinear sciences [1]. Synchronization is the process of controlling the output of a dynamical slave system in order to force its variables to match those of a corresponding master system in time [2]. Various kinds of control schemes have been introduced in the past to synchronize dynamical systems such as complete (anti-) synchronization [3], lag synchronization [4], function projective synchronization [5], generalized synchronization [6], and Q-S synchronization [7]. Recently, the topic of synchronization between dynamical systems described by fractional-order differential equations started to attract increasing attention [8,9,10,11].
Most of the research efforts have been devoted to the study of synchronization problems in low-dimensional nonlinear dynamical systems. Synchronizing high-dimensional systems in which state variables depend on not only the time but also the spatial position remains a challenge. These high-dimensional systems are generally modeled in spatial-temporal domain by partial differential systems. Recently, the search for synchronization has moved to high-dimensional nonlinear dynamical systems [12,13,14,15]. Over the last years, some studies have investigated synchronization of spatially extended systems demonstrating spatiotemporal chaos such as the works presented in [16,17,18]. Reaction–diffusion systems have shown important roles in modeling various spatiotemporal patterns that arise in chemical and biological systems [19, 20]. Reaction–diffusion systems can describe a wide class of rhythmic spatiotemporal patterns observed in chemical and biological systems, such as circulating pulses on a ring, oscillating spots, target waves, and rotating spirals. Synchronization dynamics of reaction–diffusion systems has been studied in [21, 22] using phase reduction theory. It has been shown that reaction–diffusion systems can exhibit synchronization in a similar way to low-dimensional oscillators. The effect of time-delay autosynchronization on uniform oscillations in a reaction–diffusion system has been presented in [23]. Furthermore, generalized synchronization [24], an approach based on semi-group theory [25, 26], functional spaces approach [27], the backstepping synchronization approach [28], the graph-theoretic synchronization approach [29], biological signal transmission using synchronous control [30], pinning impulsive synchronization [31], impulsive type synchronization [32], and hybrid adaptive synchronization strategy [33] for coupled reaction–diffusion systems have been introduced. To the best of our knowledge, the study of synchronization behaviors for fractional-order reaction–diffusion systems remains to this day a new and mostly unexplored field. This has motivated us to examine the phenomenon and develop suitable synchronization control laws.
This work presents a novel contribution to the topic of synchronization in some class of fractional-order spatiotemporal partial differential systems. The main aim of the present paper is to study the problem of complete synchronization in coupled fractional reaction–diffusion systems. By using fractional Lyapunov approach, nonlinear and linear control laws have been proposed to realize complete synchronization for general fractional reaction–diffusion systems. Synchronization behaviors of coupled fractional-order Lengyel–Epstein systems are obtained to demonstrate the effectiveness and feasibility of the proposed control techniques. The remainder of this paper is organized as follows: Sect. 2 illustrates some basic concepts on fractional calculus. In Sect. 3, we present two different synchronization schemes that cover two cases: nonlinear scheme and linear scheme. Finally, in order to show the applicability of the developed schemes, Sect. 4 considers the synchronization of coupled fractional Lengyel–Epstein systems. Concluding remarks are given in Sect. 5.
2 Basic concepts
Before delving into the main results and proofs of the study at hand, it is important to list some key definitions and results that will be useful at later stages.
Definition 1
The Riemann–Liouville fractional integral operator of order q of the function \(f(t)\) is defined as [34]
where Γ is a gamma function.
Definition 2
The Caputo derivative of \(f(t)\) is defined as [35]
for \(m-1< p\leq m\), \(m\in \mathbb{N}\), \(t>0\).
Theorem 1
([36])
Consider the following fractional-order system:
where \(X ( t ) \in \mathbb{R} ^{n}\), \(0< p\leq 1\), \(D_{t}^{p}\) is the Caputo fractional derivative of order p, and \(F:\mathbb{R} ^{n}\rightarrow \mathbb{R} ^{n}\). If there exists a positive definite Lyapunov function \(V ( X ( t ) ) \) such that \(D_{t}^{p}V ( X ( t ) ) <0\) for all \(t>0\), then the trivial solution of system (3) is asymptotically stable.
Lemma 1
([37])
\(\forall t>0\): \(\frac{1}{2}D_{t}^{p} ( X ^{T}(t)X(t) ) \leq X^{T}(t)D_{t}^{p} ( X(t) ) \).
3 Main results
Consider the master and the slave systems as follows:
and
where \(( u_{1}(x,t),u_{2}(x,t) ) ^{T}\) and \(( v_{1}(x,t),v _{2}(x,t) ) ^{T}\) are the corresponding states, \(x\in \varOmega \) is a bounded domain in \(\mathbb{R} ^{n}\) with smooth boundary ∂Ω, \(( d_{ij} ) \in \mathbb{R} ^{2}\), \(A= ( a _{ij} ) \in \mathbb{R} ^{2}\), \(f_{i}\), \(i=1,2\), are nonlinear continuous functions, and \(\mathbf{U}_{1}\) and \(\mathbf{U}_{2}\) are controllers to be designed. The aim of the synchronization process is to force the error between the master (4) and slave system (5), defined as
to zero. This phenomenon is called complete synchronization. We assume that the diffusive constants \(( d_{ij} ) \) satisfy
and the error system satisfies the homogeneous Neumann boundary conditions
The time partial derivatives of the error system (6) can be derived as follows:
To realize synchronization between the master and the slave systems (4) and (5), we discuss the asymptotic stability of zero solution of the error system given in Eq. (9). That is, in the following subsections, we find the controllers \(\mathbf{U}_{1}\) and \(\mathbf{U}_{2}\) in nonlinear and linear forms, such that the solution of the error system (9) goes to 0 as t goes to +∞.
3.1 Nonlinear control law
In this subsection, we outline the problem of controlling the coupled master and slave systems given in Eqs. (4) and (5) using nonlinear controllers.
Theorem 2
The master system (4) and the slave system (5) are completely synchronized under the following nonlinear control law:
where the control matrix \(C= ( c_{ij} ) _{2\times 2}\) is selected such that \(C-A\) is a positive definite matrix.
Proof
Substituting the control law given in (10) into (9) yields
We may, now, construct our Lyapunov function as
then
and by using Lemma 1
By using Green’s formula, we can get
where \(e= ( e_{1},e_{2} ) ^{T}\), and by using the assumption given in (7), the homogeneous Neumann boundary conditions (8), and the fact that \(C-A\) is a positive definite matrix, we obtain
From Theorem 1, we can conclude that the zero solution of error system (11) is globally asymptotically stable; and therefore, the master system (4) and the slave system (5) are globally completely synchronized. □
3.2 Linear control law
In the following, a linear control law is designed for the synchronization of systems (4) and (5). In this case, we assume that
where \(\alpha _{1}\), \(\alpha _{1}\), \(\beta _{1}\), and \(\beta _{2}\) are positive constants.
Theorem 3
There exists a suitable control matrix \(L= ( l_{ij} ) _{2 \times 2}\) to realize complete synchronization between the master system (4) and the slave system (5) under the following linear control law:
Proof
Substituting (14) into (9), the error system dynamics becomes
By taking the Lyapunov function \(V=\frac{1}{2}\int _{\varOmega }e^{T}e\) and using Lemma 1, Green’s formula, assumption (7), and condition (8), we get
By using the assumption (13), we obtain
The control matrix L is chosen such that \(A-L\) is a negative definite matrix. Now, we can conclude that the master system (4) and the slave system (5) are globally completely synchronized. □
4 Numerical applications
In this section, we give a numerical example showing the effectiveness and correctness of our results. Consider the following pair of master–slave system:
and
where \(t>0\), \(x\in (0,13.03)\) and \(( \mathbf{U}_{1},\mathbf{U} _{2} ) ^{T}\) is the control law to be determined. System (16) (i.e., the uncontrolled system (17)) is called the fractional-order Lengyel–Epstein system. When \(p=0.97\), \(( \delta ,\gamma ,d ) = ( 9.7607,2.7034,1.75 ) \) and the initial conditions associated to system (16) are given by \(( u_{1}(0,x),u_{2}(0,x) ) = ( \theta +0.2\cos (5 \pi x), 1+\theta ^{2}+0.6\cos (5\pi x) ) \), the solutions are shown in Figs. 1 and 2.

Dynamic behavior of solution \(u_{1}\)

Dynamic behavior of solution \(u_{2}\)
Comparing with the master–slave systems given in Eqs. (4) and (5), then the constants \(( d_{ij} ) _{2\times 2}\) and \(A= ( a_{ij} ) _{2\times 2}\) are given by
and
It is clear that assumption (13) is satisfied.
4.1 Nonlinear case
According to Theorem 2, there exists a control matrix C whose complete synchronization can be achieved between systems (16) and (17). The matrix C can be selected as
and so, simply, we can show that \(A-C\) is a negative definite matrix. Now, based on Eqs. (10) and (11) and matrices (19) and (20), the controllers can be constructed as follows:
and the error system is given by
Therefore, systems (16) and (17) are globally completely synchronized and the time evolution of the error system states \(e_{1}\) and \(e_{2}\) is shown in Figs. 3 and 4.

Time evolution of the nonlinear synchronization control error \(e_{1}\)

Time evolution of the nonlinear synchronization control error \(e_{2}\)
4.2 Linear case
First, the assumption given in Eq. (13) for the master–slave systems (16) and (17) is satisfied, and one can easily verify that
Now, according to Theorem 3, if we choose the control matrix L as
then controllers \(\mathbf{U}_{1}\) and \(\mathbf{U}_{2}\) can be designed as
It is easy to see that \(A-L\) is a negative definite matrix. Therefore, systems (16) and (17) are globally completely synchronized. In this case, the error system is described as follows:
The time evolution of the error states \(e_{1}\) and \(e_{2}\) is shown in Figs. 5 and 6.

Time evolution of the linear synchronization control error \(e_{1}\)

Time evolution of the linear synchronization control error \(e_{2}\)
5 Discussion and conclusion
The paper investigates, based on the fractional Lyapunov approach and using the master–slave concept, the synchronization control for a class of fractional spatiotemporal partial differential systems. First, a spatial-time coupling protocol for the synchronization is suggested, then novel control methods that include nonlinear and linear controllers are proposed to realize complete synchronization between coupled fractional-order reaction–diffusion systems. In both cases, the proposed control schemes stabilize the synchronization error states where the zero solution of the error system becomes globally asymptotically stable.
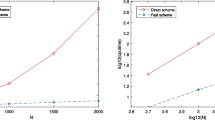
Suitable sufficient conditions for achieving synchronization of coupled fractional Lengyel–Epstein systems via suitable nonlinear and linear controllers applied to the slave are derived. As a result, from the performed numerical simulations, using the Matlab function “q-Homotopy Analysis Transform algorithm”, we can observe that the addition of the designed nonlinear and linear controllers to the controlled fractional Lengyel–Epstein system updates the coupled systems dynamics such that the system states become synchronized. Comparing the numerical simulations shown in Figs. 3, 4, 5, and 6, we can easily observe that the linear control scheme realizes synchronization faster than the nonlinear case. Also, the nonlinear control scheme requires the removal of nonlinear terms from the slave system, which may increase the cost of the controllers. So, the cost of the controllers in the nonlinear case is higher than that in the linear case.
The study confirms that the problem of complete synchronization in coupled high-dimensional fractional-order spatiotemporal systems can be realized using nonlinear and linear controllers. Also, we can easily see that the research results obtained in this paper can be extended to many other types of fractional spatiotemporal systems with reaction–diffusion terms.
References
Pikovsky, M., Rosenblum, M., Kurths, J.: Synchronization a Universal Concept in Nonlinear Sciences. Cambridge University Press, Cambridge (2001)
Luo, A.: A theory for synchronization of dynamical systems. Commun. Nonlinear Sci. Numer. Simul. 14, 1901–1951 (2009)
Li, X., Leung, A., Han, X., Liu, X., Chu, Y.: Complete (anti-)synchronization of chaotic systems with fully uncertain parameters by adaptive control. Nonlinear Dyn. 63, 263–275 (2011)
Qun, L., Hai-Peng, P., Ling-Yu, X., Xian, Y.: Lag synchronization of coupled multidelay systems. Math. Probl. Eng. 2012, 106830 (2012)
Cai, G., Hu, P., Li, Y.: Modified function lag projective synchronization of a financial hyperchaotic system. Nonlinear Dyn. 69, 1457–1464 (2012)
Ouannas, A., Odibat, Z.: Generalized synchronization of different dimensional chaotic dynamical systems in discrete time. Nonlinear Dyn. 81, 765–771 (2015)
Ouannas, A., Azar, A., Vaidyanathan, S.: On a simple approach for Q–S synchronization of chaotic dynamical systems in continuous-time. Int. J. Comput. Sci. Math. 8, 20–27 (2017)
Ouannas, A., Al-sawalha, M., Ziar, T.: Fractional chaos synchronization schemes for different dimensional systems with non-identical fractional-orders via two scaling matrices. Optik 127, 8410–8418 (2016)
Ouannas, A., Azar, A., Vaidyanathan, S.: A robust method for new fractional hybrid chaos synchronization. Math. Methods Appl. Sci. 40, 1804–1812 (2017)
Ouannas, A., Odibat, Z.: Fractional analysis of co-existence of some types of chaos synchronization. Chaos Solitons Fractals 105, 215–223 (2017)
Ouannas, A., Odibat, Z., Alsaedi, A., Hobiny, A., Hayat, T.: Investigation of Q–S synchronization in coupled chaotic incommensurate fractional order systems. Chin. J. Phys. 56, 1940–1948 (2018)
Junge, L., Parlitz, U.: Synchronization and control of couple complex Ginzburg–Landau equations using local coupling. Phys. Rev. E 61, 3736–3742 (2000)
Bragard, J., Arecchi, F., Boccaletti, S.: Characterization of synchronized spatiotemporal states in coupled nonidentical complex Ginzburg–Landau equations. Int. J. Bifurc. Chaos 10, 2381–2389 (2000)
Hramov, A., Koronovskii, A., Popov, P.: Generalized synchronization in coupled Ginzburg–Landau equations and mechanisms of its arising. Phys. Rev. E 72, 037201 (2005)
Wu, K., Chen, B.S.: Synchronization of partial differential systems via diffusion coupling. IEEE Trans. Circuits Syst. I, Regul. Pap. 59, 2655–2668 (2012)
Kokarev, L., Tasev, Z., Stojanovski, T., Parlitz, U.: Synchronizing spatiotemporal chaos. Chaos 7, 635–643 (1997)
Kocarev, L., Tasev, Z., Parlitz, U.: Synchronization of spatiotemporal chaos of partial differential equations. Phys. Rev. Lett. 79, 51–54 (1997)
Bragard, J., Boccaletti, S., Mancini, H.: Asymmetric coupling effects in the synchronization of spatially extended chaotic systems. Phys. Rev. Lett. 91, 064103 (2003)
Mikhailov, A.S., Showalter, K.: Control of waves, patterns and turbulence in chemical systems. Phys. Rep. 425, 79–194 (2006)
Mikhailov, A.S., Ertl, G.: Engineering of Chemical Complexity. World Scientific, Singapore (2016)
Nakao, H., Yanagita, T., Kawamura, Y.: Phase-reduction approach to synchronization of spatiotemporal rhythms in reaction–diffusion systems. Phys. Rev. X 4, 021032 (2014)
Kawamura, Y., Shirasaka, S., Yanagita, T., Nakao, H.: Optimizing mutual synchronization of rhythmic spatiotemporal patterns in reaction–diffusion systems. Phys. Rev. E 96, 012224 (2017)
Beta, C., Mikhailov, A.S.: Controlling spatiotemporal chaos in oscillatory reaction–diffusion systems by time-delay autosynchronization. Physica D 199, 173–184 (2004)
Hramov, A.E., Koronovskii, A.A., Popov, P.V.: Generalized synchronization in coupled Ginzburg–Landau equations and mechanisms of its arising. Phys. Rev. E 72, 037201 (2005)
García, P., Acosta, A., Leiva, H.: Synchronization conditions for master-slave reaction diffusion systems. Europhys. Lett. 88, 60006 (2009)
Acostaa, A., García, P., Leiva, H.: Synchronization of non-identical extended chaotic systems. Appl. Anal. 92, 740–751 (2013)
Ambrosio, B., Aziz-Alaoui, M.A.: Synchronization and control of coupled reaction–diffusion systems of the Fitzhugh–Nagumo type. Comput. Math. Appl. 64, 934–943 (2012)
Wu, K.N., Tian, T., Wang, L.: Synchronization for a class of coupled linear partial differential systems via boundary control. J. Franklin Inst. 353, 4062–4073 (2016)
Chen, T., Wang, R., Wu, B.: Synchronization of multi-group coupled systems on networks with reaction–diffusion terms based on the graph-theoretic approach. Neurocomputing 227, 54–63 (2017)
Zhou, L., Shen, J.: Signal transmission of biological reaction–diffusion system by using synchronization. Front. Comput. Neurosci. 11, 92 (2017)
Chen, H., Shi, P., Lim, C.C.: Pinning impulsive synchronization for stochastic reaction–diffusion dynamical networks with delay. Neural Netw. 106, 281–293 (2018)
Liu, L., Chen, W.H., Lu, X.: Impulsive \(H_{\infty }\) synchronization for reaction–diffusion neural networks with mixed delays. Neurocomputing 272, 481–494 (2018)
He, C., Li, J.: Hybrid adaptive synchronization strategy for linearly coupled reaction–diffusion neural networks with timevarying coupling strength. Neurocomputing 275, 1769–1781 (2018)
Oldham, K.B., Spanier, J.: The Fractional Calculus. Academic Press, New York (1974)
Caputo, M.: Linear models of dissipation whose Q is almost frequency independent—II. Geophys. J. R. Astron. Soc. 13, 529–539 (1967)
Chen, D., Zhang, R., Liu, X., Ma, X.: Fractional order Lyapunov stability theorem and its applications in synchronization of complex dynamical networks. Commun. Nonlinear Sci. Numer. Simul. 19, 4105–4121 (2014)
Aguila-Camacho, N., Duarte-Mermoud, M.A., Gallegos, J.A.: Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 19, 2951–2957 (2014)
Acknowledgements
The authors acknowledge Prof. GuanRong Chen, Department of Electronic Engineering, City University of Hong Kong for suggesting many helpful references.
Availability of data and materials
Not applicable.
Funding
The author Xiong Wang was supported by the National Natural Science Foundation of China (No. 61601306) and Shenzhen Overseas High Level Talent Peacock Project Fund (No. 20150215145C).
Author information
Authors and Affiliations
Contributions
AO, XW, and GG suggested the model, helped in result interpretation and manuscript evaluation. VTP, GG, and VVH helped to evaluate, revise, and edit the manuscript. XW, GG, and VVH supervised the development of work. AO and VTP drafted the article. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Ouannas, A., Wang, X., Pham, VT. et al. Synchronization results for a class of fractional-order spatiotemporal partial differential systems based on fractional Lyapunov approach. Bound Value Probl 2019, 74 (2019). https://doi.org/10.1186/s13661-019-1188-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13661-019-1188-y