
Abstract
Map information, especially volunteered geographic information (VGI) is prone to spatial inaccuracies. Due to their use as spatial reference points, spatially inaccurate landmark representations in maps might affect the ability to match maps to the represented 3D space and might compromise self-localization and orientation. Based on a map matching task in a virtual 3D environment and various degrees of spatial landmark inaccuracies in a simultaneously presented 2D map, we aimed to identify acceptable and critical values of spatial inaccuracies. Furthermore, potential effects of inaccurate semantic spatial categories were evaluated. The findings demonstrate how metric and semantic spatial inaccuracies of landmark representations affect matching of maps to the represented 3D space. Map inaccuracies corresponding to more than 10 m within 3D space and swapped landmark pictograms in a map were associated with the perception of a mismatch between maps and 3D spaces. Furthermore, the distance of landmarks to the perceiver was found to affect map matching. Spatial inaccuracies of landmark pictograms were less likely to be associated with a perceived mismatch between maps and 3D spaces when the landmarks were further away, presumably because small or moderate inaccuracies were more difficult to perceive. To reduce the identified effects of landmark inaccuracies in maps on map-matching performance, we propose to identify means to quantify the uncertainty concerning spatial landmark inaccuracies and to visually communicate this uncertainty to map users.
Zusammenfassung
Karteninformationen, insbesondere ehrenamtlich erhobene geografische Informationen, sind anfällig für räumliche Ungenauigkeiten. Aufgrund ihrer Verwendung als Referenzpunkte können räumlich ungenaue Landmarkendarstellungen in Karten die Fähigkeit beeinträchtigen, Karten mit dem dargestellten 3D-Raum abzugleichen und folglich die Positionsbestimmung und Orientierung beeinträchtigen. Basierend auf einer Kartenabgleichs-Aufgabe in einer virtuellen 3D-Umgebung und verschiedenen Graden von räumlichen Landmarkenungenauigkeiten in einer gleichzeitig präsentierten 2D-Karte sollten akzeptable und kritische Werte räumlicher Ungenauigkeiten identifiziert werden. Darüber hinaus wurden mögliche Auswirkungen von falsch zugeordneten semantischen räumlichen Kategorien bewertet. Die Ergebnisse zeigen, inwiefern metrische und semantische räumliche Ungenauigkeiten bei Landmarkendarstellungen tatsächlich die Fähigkeit beeinträchtigen können, Karten mit dem dargestellten 3D-Raum abzugleichen. Insbesondere Kartenungenauigkeiten von mehr als 10 Metern im 3D-Raum und vertauschte Landmarkenpiktogramme in einer Karte wurden mit der Wahrnehmung einer Diskrepanz zwischen Karten und 3D-Räumen in Verbindung gebracht. Darüber hinaus scheint die Entfernung von Orientierungspunkten zum Betrachter die wahrgenommene Kartenübereinstimmung zu beeinflussen, wenn Orientierungspunktpositionen in der Karte ungenau sind. Es wird vermutet, dass Ungenauigkeiten entfernter Orientierungspunkte schwieriger wahrzunehmen sind. Um die identifizierten Auswirkungen von Landmarkenungenauigkeiten in Karten auf den Kartenabgleich zu reduzieren, empfehlen wir, Mittel zur Quantifizierung der Unsicherheit bezüglich räumlicher Landmarkenungenauigkeiten zu identifizieren und diese Unsicherheit durch visuelle Darstellungsformen zu kommunizieren.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
When people navigate through unfamiliar environments, they often rely on spatial information acquired from maps to identify their current location and the direction towards a selected target location (Baskaya et al. 2016; Roskos-Ewoldsen et al. 1998). This can be achieved by comparing the arrangement of surrounding spatial objects with their map representations (Kiefer et al. 2014). Especially the relevance of landmarks for self-localization, orientation and navigation has been emphasized by different authors (Anacta et al. 2017; Elias & Paelke 2008; Kiefer et al. 2014; Wenig et al. 2017). Due to their salience, landmarks are more likely to be perceived than other spatial objects (Röser 2017; Sorrows & Hirtle 1999). Furthermore, they are argued to have a visible dominance over surrounding objects. This dominance allows to conceptualize and memorize locations of spatial objects relative to landmarks located nearby (Golledge 1999; Keil et al. 2020). Thus, landmarks are expected to act as spatial reference points and help to structure complex spatial environments (Presson and Montello 1988).
In many maps, landmarks are represented as pictograms. Through the assignment of visual properties such as color or contrast, these pictograms can be made as salient as the landmarks they represent (Keil 2021). This allows to direct visual attention towards these landmark representations and facilitate their use for spatial orientation, self-localization and navigation. Landmark pictograms in maps are usually georeferenced. This means that their locations in a map are determined by their locations within real-world space (Hackeloeer et al. 2014; Hill 2009).
For the acquisition and georeferencing of landmark representations in maps, widely used web-map services such as OpenStreetMap (OSM) and Google Maps rely on volunteered geographic information (VGI). For example, entrepreneurs can contribute information about the location and nature of their business venues and local VGI enthusiasts can contribute information about numerous types of local landmarks, for example shops, monuments or public buildings (Google LLC 2021; OpenStreetMap Foundation 2021a). The use of VGI data allows to extend maps cost-effectively, because VGI contributors usually do not receive financial compensation for their work (Sieber and Haklay 2015). However, when map data are based on VGI, data quality issues need to be considered. A key characteristic of VGI-based maps is the heterogeneity of data quality (Exel et al. 2010; Girres and Touya 2010). In the context of landmark representations in maps, heterogeneity of data quality means that the (georeferenced) locations of landmarks in maps can be more or less accurate. Inaccuracies may be caused by the lack of training or expertise of contributors, their inattentiveness, or the limited accuracy of a device used to determine geolocations, e.g., a GPS receiver (Sieber and Haklay 2015; Zandbergen and Barbeau 2011). Even if the same device is used, variations of the available GPS signal strength, for example due to shielding effects of large buildings, affect the localization accuracy (Furukawa 2015).
The relevance of landmarks as spatial reference points indicates that spatial inaccuracies of landmark representations in maps can have severe effects on map-based self-localization and spatial orientation when the landmark-based reference frame is distorted. In the context of large discrepancies between real-world landmark locations and the locations of the corresponding landmark representations in maps, distances of landmarks to other spatial objects represented in the map will not match the proportions within real-world space. If this is the case, map users might no longer be able to match the inspected map sections to the perceived real-world surroundings. Due to the relevance of effective map matching for self-localization and orientation (Kiefer et al. 2014), such discrepancies could also affect self-localization and orientation performance. Uncertainty is an established topic of cartographic research. Previous publications have addressed means to visualize uncertainty of geospatial data (e.g., Kinkeldey et al. 2014; Monmonier 2006; Schiewe and Knura 2021). Uncertainty concerning the accuracy of map data and the effectiveness of map matching has been repeatedly addressed as an issue for algorithm-based solutions (e.g., Ghys et al. 2009; Karimi et al. 2006; Lou et al. 2009). However, the human perception of inaccurately positioned landmark representations as well as the practical implications for object matching, self-localization and orientation have not yet been empirically investigated. It remains unclear to what extent spatial inaccuracies of landmark representations in maps affect the ability of map users to match map areas to the corresponding real-world spaces. The study reported in this paper addresses this research question using a map matching task in a virtual 3D environment. This virtual environment allows to display freely adjustable discrepancies between the locations of a salient landmark and its pictogram representation in a simultaneously displayed map. The aim of this approach is to assess threshold values at which people no longer perceive a match between landmark and its map representation.
We expect that low inaccuracy values do not (or barely) affect the matching of map and 3D space, because the discrepancies between 3D landmark location and pictogram location in the map are either not recognized or accepted as a minor localization error. Moderate inaccuracy values should cause uncertainty concerning the matching of map and 3D space, because the potential localization errors are too large to miss or ignore, but also too small to interpret them as a clear mismatch. According to Fischer et al. (2000), uncertainty concerning the evaluation of different choices during decision making is reflected in longer response times. This relation between uncertainty and response times is supported by the findings of Grinband et al. (2006), who used a visual length judgment task without providing a physical length reference. In this study, response times were longer when decision uncertainty was high. We expect to find similar results for responses reflecting uncertainty concerning the match of 3D stimuli and the corresponding map representations. In other words, if moderate inaccuracies lead to uncertainty, people should be less efficient in the matching of 3D environments and their map representations. Large discrepancies between landmark and pictogram location on the other hand should be easily detected and be interpreted as a certain mismatch of 3D space and map representation.
Furthermore, effects of the distance between landmark and perceiver on the certainty concerning a match or mismatch are examined. It is well known that self-to-target distance estimates are worse if the target is located farther away (Armbrüster et al. 2008; Plumert et al. 2005). Therefore, small distances between 3D landmark location and pictogram location in the map should be easier to detect if a landmark is located closer to the perceiver.
Finally, we investigate the effects of ‘semantic inaccuracies’. Such inaccuracies are based on the assignment of semantic categories to spatial objects according to their relative location to other spatial objects (cf. Zlatev 2012; Zwarts 2017). In the context of this study, the discrepancy between a landmark and its map representation could cause a placement in two different spatial semantic categories. For example, landmark pictograms might be located on the wrong side of a road or the locations of two adjacent landmark pictograms in a map might be switched. In these contexts, the two sides of a road or a reference landmark would represent separate semantic categories with no overlap (landmarks cannot be on both sides of the road simultaneously). In addition to the distance-based error information, these semantic categories provide a second cue of inaccuracy. A study of Dieckmann and Rieskamp (2007) demonstrated that inference strategies can benefit from such information redundancies. Furthermore, redundant information has been argued to support the cross-checking and validation of information (Vidal et al. 2009). Therefore, we assume that semantic spatial inaccuracies increase the likelihood of a perceived mismatch. Thus, semantic inaccuracies of landmark representations in maps could be especially critical for self-localization and orientation performance if they increase the likelihood that a false mismatch between 3D space and the map representation in its entirety (not only the landmark representations) is perceived.
Taken together, the presented study aims to quantify to what extent spatial and semantic inaccuracies of landmark representations in maps affect the matching of maps to the corresponding real-world space and, consequentially, map-based self-localization and orientation performance. The identification of thresholds for critical inaccuracy values can help cartographers as map designers to test whether maps meet the minimum requirements of georeferencing accuracy for the support of successful self-localization and orientation. For cases where the fulfillment of minimum requirements of landmark inaccuracy cannot be ensured or tested, map design implications and solutions are discussed.
2 Methods
The presented study has been reviewed and approved by the ethics committee of the Faculty of Geosciences at the Ruhr University Bochum. A screen-based experiment was used to investigate the impact of spatial inaccuracies of landmark representations in maps on successful matching of maps to 3D environments. For this purpose, virtual 3D street scenes and corresponding 2D maps were displayed simultaneously.
2.1 Participants
The study sample consisted of 37 participants (13 females, 24 males). The age range was between 18 and 39 years with a mean age of 26.62 years (SD = 4.72). Participation was rewarded with a payment of 5 €.
2.2 Research Design
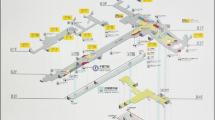
A 3D street scene was created using the 3D graphics software Blender (Version 2.82) and the Unity game engine (Version 2020.1.1f1). The scene consisted of a long road with two T-intersections. Both sides of the road were covered with numerous uniformly designed buildings and one unique building serving as a landmark (see Fig. 1). The landmark building was located along the long road on the opposite side of the two T-intersections. Two windows of the landmark building and a flag sticking out of its façade were covered with a pictogram obtained from the set of landmark pictograms used in OSM (OpenStreetMap Foundation 2021b). A scene camera was placed in the middle of the long road (170 cm height, all heights and distances based on the internal scale of Unity) between the two T-intersections. To enable a surround view, the scene camera could be rotated horizontally and vertically by moving a pc mouse. The recorded perspective was output onto a PC display (1920 × 1080 pixels, 24 inches). In the lower right corner of the screen, a map (400 × 400 pixels) was displayed that visualized the road layout around the camera location. At a resolution of four pixels per meter, the map represented an area of 100 × 100 m, or 50 m in all four directions from the camera location. In addition, the pictogram used to cover the landmarks’ windows and the flag was displayed in the map (26 × 26 pixels). Similar to the landmark, the pictogram was located alongside the long road on the opposite side of the two T-intersections (see Fig. 1). For the assessment of metric inaccuracy effects, both the landmark building location and the pictogram location in the map were randomized along the long road (z axis within 3D space in Unity, y- axis in the map) with maximum values of 40 m (160 pixels in the map) in both directions from the camera location. The maximum value of 40 m was selected to ensure that the pictograms were still fully visible in the map and not cut off by the map edges.

Stimulus design. The stimuli consisted of a 3D street scene containing numerous uniformly designed buildings and one unique landmark building. Simultaneously, a map was displayed that visualized the road layout and contained a landmark pictogram corresponding to the visualized landmark building. The metric inaccuracy of the landmark pictogram in the map depended on the randomly assigned locations of the landmark building in 3D space and the landmark pictogram in the map along the road. In the displayed example, the location of the landmark pictogram in the map is moderately inaccurate, as there is a discrepancy of 18 m between its corresponding 3D location and the location of the 3D landmark
In addition to the stimulus design mentioned above, four stimuli for the assessment of semantic inaccuracy effects were designed (see Fig. 2). In these trials, landmark and pictogram locations were fixed. The first trial was a control trial with two landmark buildings covered with two different OSM pictograms. In the map, the two used landmark pictograms were placed in the correct corresponding map locations of the 3D landmarks. The second trial displayed one landmark building and one corresponding landmark pictogram in the correct vertical (y axis) map location, but on the wrong side of the road (20 m inaccuracy on the x-axis of the map). The third trial also displayed one landmark building and one pictogram in the correct vertical map location, but in the middle of the road instead of alongside the road (10 m inaccuracy on the x-axis of the map). The last semantic inaccuracy trial displayed two landmark buildings, but the locations of the corresponding landmark pictograms in the map were switched (each 12 m inaccuracy on the y axis of the map). In all four semantic inaccuracy trials, the 3D landmarks were located in immediate proximity to the scene camera to prevent potential effects of the distance between landmark and perceiver on the results.

Maps used in the semantic inaccuracy trials. In addition to metric inaccuracy, the map pictograms displayed in these trials (except the control trial) also contained semantic inaccuracies. From left to right: control, wrong side of the road, middle of the road, two landmark positions switched. The arrows point to the map locations corresponding to the locations of the 3D landmarks (correct georeferenced locations) and were not visible to the participants
2.3 Procedure
Participants sat in front of a desk with the PC display, a computer mouse and a keyboard. In the beginning of the experiment, a short video demonstrated the experimental procedures. After that, 29 consecutive map matching trials (first 25 metric inaccuracy trials with randomized landmark and map pictogram locations, then four semantic inaccuracy trials in randomized order) were carried out. Each trial began with the presentation of the 3D scene and the corresponding map for 20 s (see Fig. 1). During this time, participants were allowed to rotate the view of the 3D scene horizontally and vertically by moving the mouse. The duration of the stimulus presentation was selected based on a pretest with varying presentation durations to ensure that participants had sufficient time to compare the locations of the landmark representation in the map and the 3D landmark. After the 20 s of stimulus presentation, a continuous scale was shown (see Fig. 3). By selecting a value on this scale, participants had to indicate whether they thought that the displayed map matched the displayed 3D scene. The left side of the scale represented a certain mismatch of map and 3D scene. The right side of the scale represented a certain match of map and 3D scene. The central area of the scale represented uncertainty concerning a match. After participants confirmed their selection by pressing a button, a three-second-long countdown was shown before the next trial began.

Map-matching response scale. The left side represented a certain mismatch of map and 3D scene. The right side represented a certain match of map and 3D scene
2.4 Measures
2.4.1 Landmark Inaccuracy
The spatial inaccuracy of the landmark representation in the map was calculated as the meter distance between the 3D landmark location and the 3D location corresponding to the map location of the landmark representation. As the locations of the 3D landmark and the landmark representation were randomized with maximum values of 40 m (or 160 pixels in the map) in both directions of the long road, the highest possible value of landmark inaccuracy was 80 m.
2.4.2 Perceived Match
As mentioned in the procedure, the perceived match of 3D space and map was assessed using a continuous scale. The selected positions on this scale were scored as numeric values ranging from zero (left side of the scale corresponding to a certain mismatch) to one (right side of the scale corresponding to a certain match).
2.4.3 Match Uncertainty
To investigate the uncertainty of participants concerning the match of the 3D space and the map representation, the values of the perceived match were rescored into match uncertainty values. This was achieved by scoring the middle of the continuous scale (corresponding to the highest uncertainty concerning a match of the 3D space and the map) as one and the right and left side of the scale (corresponding to no uncertainty concerning the match) as zero. Thus, match uncertainty equals:
where
The match uncertainty scores reflect that observers can be certain concerning a match between 3D space and a map representation, but also certain concerning a mismatch between 3D space and a map representation. In both cases, match uncertainty values will be low.
2.4.4 Landmark Distance to the Perceiver
The distances of landmarks to the perceiver were measured in meters and ranged from zero to 40 m. These values were based on the randomized location of the landmark buildings along the z-axis (depth) within 3D space. Thus, a value of zero means that the landmark is on the same z-location as the scene camera. As the scene camera was located in the middle of the road and the buildings alongside the road, thus on different locations on the x-axis, the calculated values did not equal the exact distance between 3D landmark and the virtual location of the perceiver. To plot differences of landmark inaccuracy-based match uncertainty based on the distances of landmarks to the perceiver, values were categorized into four value intervals (< 10 m, < 20 m, < 30 m, ≥ 30 m).
2.5 Statistics
The responses of two participants were excluded from the analyses, because they scored almost all trials either as certain matches or certain mismatches. This indicates that these participants either did not understand the instructions or did not carry out the task attentively. Thus, the sample size used in the statistical analyses was reduced to 35 participants.
Due to the presence of several pronounced outliers, the assumed effect of landmark inaccuracy on the perceived match between the 3D space and the map was assessed using Spearman’s correlation coefficient. Furthermore, a generalized mixed-effects model (gamma distribution) was applied to investigate a potential interaction effect of landmark inaccuracy and the landmark distance to the perceiver on the perceived match between the 3D space and the map. To account for participant-based variance, repeated measures of participants were specified as a random effect. As the gamma distribution of the applied model cannot process values of zero, one data transformation (all values of zero transformed to 0.0001) and one data filter (all values of zero removed from the dataset) were used and separate models were calculated for both approaches.
Potential effects of match uncertainty on task efficiency were investigated based on a Spearman correlation test between match uncertainty values and the time used to select a value on the response scale.
To identify critical cutoff scores of landmark inaccuracies for the successful matching of 3D space and map, match uncertainty and landmark inaccuracy values were plotted. Values were plotted once for all responses, and once separately for the four specified intervals of landmark distance to the perceiver (< 10 m, < 20 m, < 30 m, ≥ 30 m).
Differences of the perceived match between the 3D space and the map between the four semantic inaccuracy trials were compared using the Friedman test. Post hoc Wilcoxon signed-rank tests were used to compare the mean scores separately for all pairs of semantic inaccuracy trials. To account for the increased likelihood of null hypothesis rejections due to multiple tests, Bonferroni corrections were applied. Furthermore, to assess potential effects of different semantic inaccuracies on task efficiency, mean response times were compared between the semantic trials using the Friedman test.
3 Results
The landmark inaccuracy in meters was significantly and negatively correlated to the perceived match between the 3D space and the map (rs(873) = − 0.63, p < 0.001). Stimuli with a low spatial discrepancy between the 3D landmark location and the pictogram location in the map were mostly scored as a certain match, whereas stimuli with a high spatial discrepancy were mostly scored as a certain mismatch (see Fig. 4). The generalized mixed-effects models backed this finding with a significant main effect of landmark inaccuracy on the perceived match scores in both the model based on transformed values of zero (β = -0.081, 95% CI [− 0.097, − 0.065], SE < 0.001, p < 0.001) and the model based on removed values of zero (β = − 0.067, 95% CI [− 0.074, − 0.06], SE = 0.003, p < 0.001). The effect sizes are supported by very narrow confidence intervals. The interaction effect between landmark inaccuracy and the landmark distance to the perceiver was not significant in the model based on transformed values of zero (β = 0.0004, 95% CI [− 0.0001, 0.001], SE < 0.001, p = 0.12), but a significant interaction effect was found in the model based on removed values of zero (β = 0.0006, 95% CI [0.0003, 0.0008], SE < 0.001, p < 0.001). However, compared to the very small effect size, the confidence interval was relatively wide.

Perceived match of the 3D space and the map based on the spatial inaccuracy of the landmark pictogram displayed in the map
A significant positive correlation was found between the match uncertainty and the response time of the continuous response scale (rs(873) = 0.23, p < 0.001). Thus, participants required significantly more time to respond if they were uncertain whether the map and the 3D space matched.
Based on the plotted match uncertainty and landmark inaccuracy values with smoothed conditional means (LOESS, locally weighted scatterplot smoothing) in Fig. 5, cutoff scores for the shifting of match uncertainty can be identified. Match uncertainty values were moderate when landmark inaccuracy values were low, as many participants perceived a certain match between the 3D space and the map (as visible in the perceived match scores in Fig. 4). With increasing landmark inaccuracy values, match uncertainty values rose to its maximum at approximately 12 m of landmark inaccuracy. At even higher landmark inaccuracy values, match uncertainty dropped down again, because more participants were certain that the 3D space and the map did not match. After a steady drop at approximately 20 m of landmark inaccuracy, the dropping rate decreased.

Uncertainty concerning the match of the 3D space and the map based on the spatial inaccuracy of the landmark pictogram displayed in the map. Uncertainty was highest for landmark inaccuracy values of approximately 12 m and low for extremely low or high landmark inaccuracy values
By plotting the smoothed conditional means separately for the specified landmark distance intervals (see Fig. 6), the significant interaction effect between landmark inaccuracy and the landmark distance to the perceiver can be visually interpreted. The different mean curves demonstrate that if landmarks were farther away from the perceiver, the drop of the curves towards lower uncertainty values (certain identification of a mismatch between the 3D space and the map) was associated with higher landmark inaccuracy values.

Uncertainty concerning the match of the 3D space and the map based on the spatial inaccuracy of the landmark pictogram displayed in the map. Smoothed conditional mean curves are plotted separately for each landmark distance interval. If landmarks were farther away from the perceiver, higher landmark inaccuracy values were required for the identification of a certain mismatch between the 3D space and the map. Maximum inaccuracy values of landmarks closer to the perceiver were smaller, because the maximum distance of both the landmark and the map pictogram to the perceiver was 40 m in both directions from the perceiver. Therefore, if the landmark was located close to the perceiver, high landmark inaccuracy values were mostly based on the distance of the landmark pictogram to the perceiver
As shown in Fig. 7, almost all participants scored the semantic control trial as a certain match between the 3D space and the map (M2LMs correct position = 0.991). The trials with landmark pictograms located on the wrong side of the road or with two landmark pictograms with switched map locations on the other hand were scored by most participants as a certain mismatch between the 3D space and the map (Mwrong side of road = 0.194, M2 LMs positions switched = 0.143). The responses to the trial with a landmark pictogram in the middle of the road were wide spread with some participants scoring it as a certain mismatch between the 3D space and the map and other participants scoring it as a certain match (Mmiddle of road = 0.419). However, Fig. 7 demonstrates that a certain mismatch was still the most common response for landmark pictograms in the middle of the road.

Responses concerning the perceived match of 3D space and map in one control trial and the three trials containing different types of semantic landmark inaccuracies
Comparing the scores of the perceived match in the semantic inaccuracy trials using the Friedman test demonstrated significant differences between the mean scores (X2F(3) = 87.469, p < 0.001). The Bonferroni-corrected post hoc Wilcoxon signed-rank tests (see Table 1) revealed that all mean score differences except the difference between ratings concerning landmarks on the wrong side of the road and two landmarks with switched positions were statistically significant. However, no statistically significant response time differences were found between the semantic inaccuracy trials (Mwrong side of road = 4.436, Mmiddle of road = 5.305, M2 LMs positions switched = 4.935, M2 LMs correct position = 4.011, X2F(3) = 2.908, p = 0.406).
4 Discussion
The presented findings provide the foundation for a first empirical investigation of the effects of landmark inaccuracies in maps on map matching. As expected, higher spatial inaccuracies of landmark representations in maps were associated with the perception of a mismatch between 3D spaces and their map representations despite the correct spatial representation of the other map elements (the road structure). This demonstrates the relevance of landmarks as spatial reference points used to structure complex environments (Presson and Montello 1988), as the participants obviously relied on the 3D landmarks and its map representations for map matching.
Consistent with our predictions, match uncertainty based on the inaccuracies of landmark map locations had a reversed U-shape with moderate uncertainty values for low and high landmark inaccuracies and higher uncertainty values for moderate landmark inaccuracies. Interestingly, even if the positions of landmark representations in the maps perfectly matched the location of the corresponding 3D landmark, a moderate uncertainty concerning the perceived match was observed (see Fig. 5). Uncertainty values of landmarks with no or extremely low spatial inaccuracies were even higher compared to landmarks with extremely high spatial inaccuracies. Thus, it seems to be more difficult to identify a perfect match that to identify a clearly pronounced mismatch between a landmark and its representation in a map.
In agreement with the findings of Fischer et al. (2000) and Grinband et al. (2006), high uncertainty concerning the match of 3D scenes and maps was associated with a higher response time. Thus, match uncertainty due to moderate spatial inaccuracies of landmark representations in maps seems to impair map matching efficiency. Based on the peak value of match uncertainty identified in Fig. 5, task efficiency was found to be worst at approximately 12 m of landmark inaccuracy. However, if we consider tasks effectiveness, the ability to successfully match a 3D space to its corresponding map representation, a different critical score of landmark inaccuracy can be identified. Figure 4 shows that at approximately 10 m of landmark inaccuracy, the average perceived match score drops below 0.5. This means that participants perceiving landmark inaccuracies of more than 10 m leaned towards the perception of a mismatch of the 3D landmark and the map representation. In the context of map-based real-world orientation, this can be problematic, because it implies that map matching can fail due to a single inaccurately georeferenced map element. As map matching is a prerequisite for effective map-based self-localization and orientation (Kiefer et al. 2014), we can deduce from our data that performance on map-based spatial tasks similar to our experimental design might suffer if spatial inaccuracies of landmark representations in maps are larger than 10 m.
The significant interaction effect between landmark inaccuracy and the landmark distance to the perceiver supports our assumption that small or moderate inaccuracies are less likely to affect the map matching performance if the landmark is further away from the perceiver. This fits to previous findings, which showed that self-to-target distance estimations are worse if the target is further away (Armbrüster et al. 2008; Plumert et al. 2005). As visible in Fig. 6, participants were less likely to perceive a certain mismatch between the 3D space and the map based on moderate spatial inaccuracies of landmarks if the landmarks were further away. However, we have to consider that a significant interaction effect was only found in the model based on removed values of zero. This illustrates that the interaction effect between landmark inaccuracy and the landmark distance to the perceiver is only weakly pronounced. Furthermore, due to the small effect size and the wide confidence interval of the interaction effect, we cannot deduce precise cutoff scores for different landmark distances or distance intervals. Future studies could address the identification of such cutoff scores by placing landmarks on fixed intervals (e.g., every 2 m) instead of selecting landmark locations randomly.
The absence of a significant interaction effect between landmark inaccuracy and the landmark distance to the perceiver in the model with increased values of zero could also be a pointer towards potential issues of extreme responses. Figure 4 demonstrates that the perceived match was scored as exactly one or zero in many trials. A sudden shift from numerous scores of exactly one to numerous scores of exactly zero can be observed at approximately 10 m of landmark inaccuracy. This demonstrates that some participants tended to score extreme as either a certain match or a certain mismatch. The tendency to select extreme values could be partially based on the experimental design. Although a continuous scale was used, the question concerning a match or mismatch could already stimulate binary responses, because the possibility of a map mismatch is explicitly addressed. In a real-world orientation scenario on the other hand, we would expect a much more continuous shift towards a certain mismatch with increasing inaccuracy of landmark pictograms, because people are not explicitly confronted with the possibility that a displayed map (for example selected based on a GPS signal) does not match the surrounding space. Therefore, instead of immediately rejecting the map information, people should be more likely to experience uncertainty concerning the map information. Thus, removing values of zero might actually have made the model more representative of a real-world orientation scenario. To address the issue of extreme responses, future studies should assess match uncertainty in a way that less explicitly communicates the possibility of a mismatch between the 3D space and the map representation.
The investigation of semantic spatial properties demonstrated that semantic spatial inaccuracies of landmark representations in maps affect the likelihood that a mismatch between a 3D space and a map is perceived. This supports the assumption that people rely on semantic categories to conceptualize spatial environments (Zlatev 2012; Zwarts 2017). The findings also confirm the relevance of redundant information for inference strategies (Dieckmann & Rieskamp 2007) and its use for cross-checking and validation (Vidal et al. 2009). However, in the context of landmark inaccuracies, it is important to consider that semantic inaccuracy provides a redundancy of false information, namely that the perceived map does not represent the perceived 3D space. Thus, information redundancy increases the likelihood of a false alarm. Due to the relevance of landmarks as spatial reference points (Presson and Montello 1988), we can expect that the increased likelihood to perceive a mismatch between the 3D space and the map will also affect self-localization and orientation performance.
The comparison of the three investigated semantic inaccuracy types revealed different likelihoods that a certain mismatch between the 3D space and the map is perceived. Especially when landmark representations were located on the wrong side of the road and when the positions of two landmark pictograms were swapped, participants were unable to match the 3D space to the corresponding map. However, to assess the effect of the semantic inaccuracy, perceived match values need to be compared to the perceived match values of landmark representations with similar metric inaccuracy values but no semantic inaccuracy (see Fig. 4). This comparison demonstrates that when landmarks in maps were located on the wrong side of the road or in the middle of the road, perceived match scores were very similar to trials with similar metric inaccuracies but no semantic inaccuracy. This indicates that these semantic inaccuracies barely, if at all, affected the ability to match 3D spaces to their map representations in this specific task. However, if the locations of two landmark pictograms in the map were swapped, far less participants identified a match between the 3D space and the map when compared to trials with similar metric inaccuracies but no semantic inaccuracy. This could be another indicator for the relevance of landmarks as spatial reference points (cf. Keil et al. 2020; Presson and Montello 1988). Semantic inaccuracies based on the (wrong) location of landmark representations relative to other map elements seem to have no additional effect on map matching, as long as the other map elements are no relevant spatial reference points. Another explanation could be that landmark pictograms usually communicate semantic information (Keil et al. 2019), for example the categorization as a specific store type or a public service building. The combination of spatial semantics with functional semantics (“the restaurant is on the left side of the shoe store”) might have a stronger effect on effective map matching than the communication of only spatial semantics (“the restaurant is on the left side of the road”). Thus, future studies need to assess whether the reduced map matching ability associated with swapped landmark locations is due to the use of landmarks as important spatial reference points or the functional semantics of the pictograms. This could be achieved using visually salient landmarks without apparent semantic associations and by representing the landmarks in the maps based on their visual characteristics instead of using pictograms.
In addition to the specific limitations mentioned above, some additional limitations of the presented need to be considered. First, potential effects of map scale were not considered in this study. Using different map scales might affect to what extent spatial inaccuracies of landmark pictograms are perceived and affect map matching. In large scale maps, small or moderate spatial inaccuracies could be less problematic, because they correspond to smaller (pixel) distances in the map. To address this assumption, future studies need to use different map scales in map matching tasks. Second, despite the use of a pretest to select the optimal stimulus presentation duration, several participants reported that the duration was too long and they felt bored after they successfully compared the locations of the landmark pictogram in the map and the 3D landmark. Therefore, follow-up studies could apply shorter stimulus presentation durations. More time pressure could also lead to more uncertain responses as participants have less time to revalidate their decision concerning a perceived match or mismatch. Furthermore, introducing more time pressure could better simulate real-world map matching scenarios, e.g., during car-based navigation. Third, individual differences of spatial abilities might have affected the perception of a match or mismatch between the 3D scenes and the maps. For example, as participants were able to rotate the camera, the rotation of the map often did not align with the rotation and viewing direction of the camera. In these cases, people skilled in mental rotation tasks should be better able to match 3D objects to their map representations. Therefore, assessing spatial abilities of map users could help to better understand the relation between spatial inaccuracies of landmark representations and map matching. Fourth, with the exception of two trials (one with no spatial inaccuracies and one with switched pictogram locations), only scenes with a single landmark were displayed. Real-world scenarios on the other hand often contain multiple landmarks that are visible at the same time. If only a minority of real-world landmarks is represented at considerably inaccurate map locations, other landmarks might help to maintain map matching performance. To address this issue, future studies need to investigate scenarios with multiple landmarks and landmark representations with varying degrees of spatial inaccuracy. Finally, the identified critical thresholds of spatial inaccuracies of landmark representations might not be applicable as a general rule. Under other circumstance, e.g., when a map with a different map scale is used, lower or higher values of spatial inaccuracy might be required to perceive a mismatch between a 3D landmark and its map representation. Thus, further research is required to broaden our understanding of how spatial inaccuracies of map elements affect successful map matching.
5 Outlook
The findings of the presented study demonstrate that inaccurately georeferenced landmarks can affect peoples’ ability of matching maps to the represented 3D environments. The most obvious resolution, i.e., reducing landmark inaccuracies in maps, is unfortunately not a feasible approach, because we can assume that these inaccuracies are usually not implemented deliberately. Contributors of geographic information might simply not be able to provide more accurate spatial information and map creators might not be able to verify the accuracy of contributed geographic information. This is especially the case for VGI-based maps with their numerous contributors and the resulting heterogeneity of data quality (Exel et al. 2010; Girres & Touya 2010). Thus, the accuracy of landmark locations in maps, especially in VGI-based maps can be uncertain. MacEachren et al. (2005) suggest to communicate the uncertainty of geospatial information uncertainty by visualizing it in the map. The open data approach of VGI-based maps like OpenStreetMap provides numerous opportunities to calculate spatial uncertainty estimates, for example based on the number of contributors of a geolocation and the spread of contributions. These uncertainty estimates could then be used to visualize uncertainty in maps. Such a proactive approach of communicating spatial uncertainty might increase the awareness of map users concerning potential spatial landmark inaccuracies and thereby help to maintain the ability to match maps to the corresponding 3D spaces and, consequentially, also maintain self-localization and orientation performance.
References
Anacta VJ, Schwering A, Li R, Muenzer S (2017) Orientation information in wayfinding instructions: evidences from human verbal and visual instructions. Geo J 82(3):567–583. https://doi.org/10.1007/s10708-016-9703-5
Armbrüster C, Wolter M, Kuhlen T, Spijkers W, Fimm B (2008) Depth perception in virtual reality: distance estimations in peri- and extrapersonal space. Cycberpsychol Behav 11(1):9–15. https://doi.org/10.1089/cpb.2007.9935
Baskaya A, Wilson C, Özcan YZ (2016) Wayfinding in an unfamiliar environment: different spatial settings of two polyclinics. Environ Behav 36(6):839–867. https://doi.org/10.1177/0013916504265445
Dieckmann A, Rieskamp J (2007) The influence of information redundancy on probabilistic inferences. Mem Cognit 35(7):1801–1813. https://doi.org/10.3758/BF03193511
Elias B, Paelke V (2008) User-centered design of landmark visualizations. In: Meng L, Zipf A, Winter S (eds) Map-based Mobile Services. Springer, pp. 33–56. https://doi.org/10.1007/978-3-540-37110-6_3
Fischer GW, Luce MF, Jia J (2000) Attribute conflict and preference uncertainty: effects on judgment time and error. Manage Sci 46(1):88–103. https://doi.org/10.1287/mnsc.46.1.88.15131
Furukawa H (2015) Empirical evaluation of the pedestrian navigation method for easy wayfinding. In: Chakrabarti S, Saha HN (eds) International Conference and Workshop on Computing and Communication (IEMCON), (pp. 1–7). IEEE. https://doi.org/10.1109/IEMCON.2015.7344437
Ghys, K., Kuijpers, B., Moelans, B., Othman, W., Vangoidsenhoven, D., & Vaisman, A. (2009). Map Matching and Uncertainty: an Algorithm and Real World Experiments. In O. Wolfson, D. Agrawal, & C.-T. Lu (Eds.), Proceedings of the 17th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems (p. 468). ACM Press. https://doi.org/10.1145/1653771.1653846
Girres J-F, Touya G (2010) Quality assessment of the French OpenStreetMap dataset. Trans GIS 14(4):435–459. https://doi.org/10.1111/j.1467-9671.2010.01203.x
Golledge RG (1999) Human wayfinding and cognitive maps. In: Golledge RG (ed) Way finding behavior: cognitive mapping and other spatial processes. The Johns Hopkins University Press, pp 5–45
Google LLC (2021) Einen Brancheneintrag auf Google My Business hinzufügen oder Anspruch darauf erheben. https://support.google.com/business/answer/2911778?co=GENIE.Platform%3DDesktop&hl=de
Grinband J, Hirsch J, Ferrera VP (2006) A neural representation of categorization uncertainty in the human brain. Neuron 49(5):757–763. https://doi.org/10.1016/j.neuron.2006.01.032
Hackeloeer A, Klasing K, Krisp JM, Meng L (2014) Georeferencing: a review of methods and applications. Ann GIS 20(1):61–69. https://doi.org/10.1080/19475683.2013.868826
Hill LL (2009) Georeferencing: The geographic associations of information. MIT Press.
Karimi HA, Conahan T, Roongpiboonsopit D (2006) A methodology for predicting performances of map-matching algorithms. In: Carswell JD, Tezuka T (eds) Lecture notes in computer science. Web and wireless geographical information systems, vol. 4295, pp. 202–213. Springer, Berlin, Heidelberg. https://doi.org/10.1007/11935148_19
Keil, J. (2021). The salience of landmark representations in maps and its effects on spatial memory [Dissertation]. Ruhr University Bochum, Bochum. https://doi.org/10.13154/294-8216
Keil J, Edler D, Dickmann F, Kuchinke L (2019) Meaningfulness of landmark pictograms reduces visual salience and recognition performance. Appl Ergon 75:214–220. https://doi.org/10.1016/j.apergo.2018.10.008
Keil J, Edler D, Reichert K, Dickmann F, Kuchinke L (2020) Structural salience of landmark pictograms in maps as a predictor for object location memory performance. J Environ Psychol 72:101497. https://doi.org/10.1016/j.jenvp.2020.101497
Kiefer P, Giannopoulos I, Raubal M (2014) Where am i? Investigating map matching during self-localization with mobile eye tracking in an urban environment. Trans GIS 18(5):660–686. https://doi.org/10.1111/tgis.12067
Kinkeldey C, MacEachren AM, Schiewe J (2014) How to assess visual communication of uncertainty? A systematic review of geospatial uncertainty visualisation user studies. Cartogr J 51(4):372–386. https://doi.org/10.1179/1743277414Y.0000000099
Lou Y, Zhang C, Zheng Y, Xie X, Wang W, Huang Y (2009) Map-matching for low-sampling-rate GPS trajectories. In: Wolfson O, Agrawal D, Lu C-T (eds) Proceedings of the 17th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems. ACM Press. https://doi.org/10.1145/1653771.1653820
MacEachren AM, Robinson A, Hopper S, Gardner S, Murray R, Gahegan M, Hetzler E (2005) Visualizing geospatial information uncertainty: what we know and what we need to know. Cartogr Geogr Inf Sci 32(3):139–160. https://doi.org/10.1559/1523040054738936
Monmonier M (2006) Cartography: uncertainty, interventions, and dynamic display. Prog Hum Geogr 30(3):373–381. https://doi.org/10.1191/0309132506ph612pr
OpenStreetMap Foundation (2021a). Getting involved. https://wiki.openstreetmap.org/wiki/Getting_Involved
OpenStreetMap Foundation (2021b). SymbolsTab. https://wiki.openstreetmap.org/wiki/SymbolsTab
Plumert JM, Kearney JK, Cremer JF, Recker K (2005) Distance perception in real and virtual environments. ACM Trans Appl Percept 2(3):216–233. https://doi.org/10.1145/1077399.1077402
Presson CC, Montello DR (1988) Points of reference in spatial cognition: stalking the elusive landmark. Br J Dev Psychol 6(4):378–381. https://doi.org/10.1111/j.2044-835X.1988.tb01113.x
Röser F (2017) A cognitive observer-based landmark-preference model. KI Künstliche Intelligenz 31(2):169–171. https://doi.org/10.1007/s13218-016-0475-3
Roskos-Ewoldsen B, McNamara TP, Shelton AL, Carr W (1998) Mental representations of large and small spatial layouts are orientation dependent. J Exp Psychol Learn Mem Cogn 24(1):215–226. https://doi.org/10.1037/0278-7393.24.1.215
Schiewe J, Knura M (2021) Consideration of uncertainty information in accessibility analyses for an effective use of urban infrastructures. ISPRS Int J Geo Inf 10(3):171. https://doi.org/10.3390/ijgi10030171
Sieber RE, Haklay M (2015) The epistemology(s) of volunteered geographic information: a critique. Geo Geogr Environ 2(2):122–136. https://doi.org/10.1002/geo2.10
Sorrows ME, Hirtle SC (1999) The nature of landmarks for real and electronic spaces. In: Freksa C, Mark DM (eds) Spatial Information Theory. Cognitive and Computational Foundations of Geographic Information Science: International Conference on Spatial Information Theory (pp. 37–50). Springer. https://doi.org/10.1007/3-540-48384-5_3
van Exel M, Dias E, Fruijtier S (2010) The impact of crowdsourcing on spatial data qualityindicators. GIScience. http://giscience2010.org/index6b70.html
Vidal MC, Carvalho PV, Santos MS, Santos IJD (2009) Collective work and resilience of complex systems. J Loss Prev Process Ind 22(4):516–527. https://doi.org/10.1016/j.jlp.2009.04.005
Wenig N, Wenig D, Ernst S, Malaka R, Hecht B, Schöning J (2017) Pharos: improving navigation instructions on smartwatches by including global landmarks. In: Rogers Y, Jones M, Tscheligi M, Murray-Smith R (eds) Proceedings of the 19th International Conference on Human-Computer Interaction with Mobile Devices and Services (pp. 1–13). ACM. https://doi.org/10.1145/3098279.3098529
Zandbergen PA, Barbeau SJ (2011) Positional accuracy of assisted GPS data from high-sensitivity GPS-enabled mobile phones. J Navig 64(3):381–399. https://doi.org/10.1017/S0373463311000051
Zlatev J (2012) Spatial semantics. Oxford University Press. https://doi.org/10.1093/oxfordhb/9780199738632.013.0013
Zwarts J (2017) Spatial semantics: modeling the meaning of prepositions. Lang Ling Compass 11(5):e12241. https://doi.org/10.1111/lnc3.12241
Acknowledgements
This study is part of the VGIscience Priority Programme “Volunteered Geographic Information: Interpretation, Visualisation and Social Computing” (SPP 1894) funded by the German Research Foundation (314977345, KU 2872/6-2 and FD 771/11-2). The authors have no competing interests to declare that are relevant to the content of this article.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Keil, J., Edler, D., Dickmann, F. et al. Uncertainties in Spatial Orientation: Critical Limits for Landmark Inaccuracies in Maps in the Context of Map Matching. KN J. Cartogr. Geogr. Inf. 72, 243–254 (2022). https://doi.org/10.1007/s42489-022-00105-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42489-022-00105-7