
Abstract
Landmarks, salient spatial objects, play an important role in orientation and navigation. They provide a spatial reference frame that helps to make sense of complex environments. Landmark representations in maps support map matching and orientation, because matching landmarks to their map representations provides information about spatial directions and distances. However, effective landmark-based map matching demands sufficiently accurate georeferencing of the landmarks represented in a map, because spatial inaccuracies of landmark representations cause distortions of the spatial reference frame and derived directions and distances. The requirement of accurate landmark georeferencing imposes difficulties on the use of maps based on Volunteered Geographic Information (VGI) for map matching. Differences of the motivation, competence, and available apparatus of volunteers can cause great variations of the data quality in VGI-based maps, including spatial accuracy of landmark representations. In a series of experiments, we investigated and quantified to what extent spatial inaccuracies of landmark representations in VGI-based maps affect map matching. Based on the findings, we were able to identify critical thresholds for spatial landmark inaccuracies. Furthermore, we explored potential ways to sustain successful map matching at higher degrees of spatial landmark inaccuracies. Through visual communication of spatial uncertainties, we were able to make map users more resilient to potential inaccuracies and sustain successful map matching.
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others

Keywords
1 Introduction
In unfamiliar environments, people tend to use maps for orientation and navigation (Roskos-Ewoldsen et al. 1998). By matching spatial representations in maps to real-world objects, people identify their own location and obtain spatial information about orientation and route directions that are necessary for effective navigation (Kiefer et al. 2014). In the context of such a map matching process, landmarks, salient spatial objects with a fixed geographic location (Anacta et al. 2017; Bestgen et al. 2017; Claramunt and Winter 2007), have been discussed to play an important role (see Chap. 8). In maps, landmarks are often represented as pictograms that communicate semantic information about the nature or purpose of the represented landmark (Keil 2021). Furthermore, Peebles et al. (2007) found that people tend to use single landmarks and their map representations to match 2D maps to 3D spaces.
In recent years, due to the widespread use of mobile Internet and smartphones, paper maps have been increasingly replaced by online map services. The advantages of these online maps are their convenient availability and their ability to record and display one’s own position in real time and to calculate and display routes in real time. Furthermore, they are—in comparison to printed maps—(often) more up to date, since these digital maps do not have to be reprinted after each modification. A particular phenomenon that has arisen in connection with online maps are maps based on Volunteered Geographic Information (VGI), with maps based on the OpenStreetMap (OSM) project as the most prominent representatives of this map category. Opposed to “traditional” commercial or official maps, VGI-based maps are created in a process that allows and even encourages the participation of map users (Goodchild 2007). Volunteers can add or modify map content and thereby contribute to the map creation process.
The use of VGI data can provide substantial benefits, in particular in regard to the quality of a map. In areas with numerous volunteers, these volunteers are able to make corrections to the map at very short notice if local conditions change, for example, when a road is closed or a new building is built (Barrington-Leigh and Millard-Ball 2017; Olteanu-Raimond et al. 2017). Thus, the availability of VGI data has improved geographic information (Flanagin and Metzger 2008) and the way such information is spread and processed. Volunteers also share the role of map users of this geographic information. Hence, the data provided clearly relies on individual experiences and thus shares a natural, implicit advantage over commercial products. As a result, the involvement of volunteers in map creation can lead to the mapping of spatial elements that are less relevant from the point of view of a public or commercial authority but are very relevant for certain groups of map users. For example, OSM contains many hiking trails that are not mapped in official maps (See et al. 2017). However, the source of these advantages of VGI-based maps is directly linked to disadvantages in terms of data quality (cf. Bégin et al. 2013).
Overall, there is an ongoing and thorough discussion on quality issues of such spatial data, mainly in comparison to commercial products (e.g., Degrossi et al. 2018; Flanagin and Metzger 2008; Senaratne et al. 2017; Zhang and Malczewski 2017). In regions with only a few active volunteers who provide VGI data, the maps are usually much less detailed (Rousell and Zipf 2017), and map errors tend to get fixed late, if at all. It is also known that interindividual differences between volunteers affect the quality of VGI-based maps. These differences include personal motivations, skills and mapping expertise, as well as the technical equipment used, for example, devices to record GPS data (Van Exel et al. 2010). These between-region and interindividual differences result in a pronounced heterogeneity of data quality (c.f. Chap. 3) and completeness available in VGI-based maps (Girres and Touya 2010). Thus, data quality and data characteristics are of a strongly heterogeneous nature in the case of VGI. Most map readers, however, do not question data quality when, for example, using OSM or are even not aware of the fact that maps are based on OSM. They are not aware of the very different characteristics of VGI as opposed to traditional or commercial datasets (Skopeliti et al. 2017). In contrast, Schiewe and Schweer (2013) report “a rather high degree of awareness of uncertainty problems” in OSM users. But this awareness circulates around completeness and up-to-dateness of the data, while localization errors and thematic inaccuracies remain unaware (Schiewe and Schweer 2013). As a result, it can be assumed that map readers treat every available landmark in the same way, independent of its representational quality.
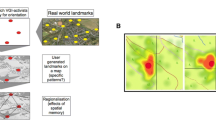
In the context of successful map matching, two potential problems arise from the described disadvantages of VGI-based maps. First, in some cases, there may not be a sufficient number of spatial reference points represented in certain map areas that would be necessary for successful map matching. And second, localization errors of important spatial reference points to be used as landmarks in navigation and orientation (see Fig. 9.1) could potentially lead to unsuccessful map matching, i.e., elements in real space not being recognized in the map or landmarks represented in the map are not identified in real space.

Inaccuracies of landmark representations in maps. Due to data quality issues intrinsic to VGI data, individual landmark representations in VGI-based maps can be spatially more or less inaccurate. For example, the gas station represented in the map above may also be located on the other side of the road or on a different location along the road. If spatial inaccuracies are too high, map users may experience difficulties when trying to match map representations to the represented real-world environment (Ⓒ OpenStreetMap contributors)
As part of the SPP 1894 (Volunteered Geographic Information (VGI): Interpretation, Visualization and Social Computing) of the DFG, the sub-project on “The Effects of Landmark Uncertainty in VGI-based Maps: Approaches to Improve Wayfinding and Navigation Performance” carried out by the Ruhr-Universität Bochum (RUB) and the International Psychoanalytical University Berlin (IPU) addresses these presumed effects of spatial landmark inaccuracies on map matching, orientation, and navigation performance. The first aim was to assess and quantify to what extent spatial inaccuracies of landmark representations affect map matching and, consequentially, orientation and navigation (see Sect. 9.2). In a second step, approaches for reducing the assumed negative effects of landmark inaccuracies in maps on map matching are being developed and evaluated (see Sect. 9.3).
2 Effects of Landmark Inaccuracies on Map Matching
In a first experiment of the SPP 1894 sub-project, we aimed to investigate and quantify how spatial inaccuracies of landmark representations in maps affect the ability of map users to match the map to the represented 3D environment. For this purpose, we created a virtual 3D environment and a digital map that allowed us to fully control the locations of a landmark building and its pictogram representation in the map (see Fig. 9.2).

Stimulus design. Participants saw a 3D environment containing a landmark building and a corresponding map representation. Random spatial inaccuracies were applied to the landmark representation in the map (here, landmark building matching the map representation)
The locations of both the 3D landmark and the landmark representation were fully randomized, independent of each other along the road. Consequentially, the spatial inaccuracy of the landmark representations was different in each trial. After each trial, participants used a continuous scale to respond to what extent they perceived (as pedestrians) the map as matching the 3D environment. For full details on the study design, see Keil et al. (2022a).
The results demonstrated a pronounced and significant nonlinear relation between the spatial inaccuracy of the landmark representation in the 2D map and the perceived match between the 3D environment and the map (see Fig. 9.3). A tipping point was observed at approximately 10 meters of spatial inaccuracy, i.e., 10-meter walking distance in a virtual 3D environment. Maps with less spatial inaccuracy were mainly rated as matching the 3D environment. Maps with more than 10 meters of spatial inaccuracy were mainly rated as not matching the 3D environment.

Relation between inaccuracies of the landmark representation in the map and the perceived match between the 3D environment and the map. Values of one represent a certain match, values of zero represent a certain mismatch, and values between zero and one represent uncertainty concerning a match or mismatch. If spatial inaccuracies of the landmark representation were too high, maps were perceived as not matching the represented 3D environment
These findings suggest that inaccuracies of a landmark’s map representation of more than 10 meters for a pedestrian observer and map user are recognized. Map users then seem to start to mismatch map and 3D space representations, meaning that they are getting unable to match a corresponding map to the represented 3D space, although in the present experiment, only one map element (the landmark pictogram) is spatially inaccurate. However, some issues concerning the generalizability of these findings still need to be considered. First, in this experiment, only one fixed map scale was applied. However, most modern digital maps support dynamic adjustments of the visualized map scale. Selecting smaller map scales results in smaller misplacements of spatially inaccurate landmark representations in terms of pixels or millimeters. Consequentially, spatial landmark inaccuracies could be more difficult to recognize if a smaller map scale is used. Hence, how specific spatial inaccuracies of landmark representations affect map matching also needs to be quantified with different map scales in future experiments (see Keil et al. 2022a).
A second limitation concerning the generalizability of the findings is that the experiment was carried out with controlled virtual 3D environments. Although full experimental control is important to isolate the effect of the spatial inaccuracy of the landmark pictogram on map matching, it needs to be considered that people who carry out a map matching task are usually confronted with complex real-world environments containing numerous spatial elements that can act as helpful spatial reference points or as distractors. For example, an unusual route shape could support the map matching process or visually highly salient spatial objects that attract visual attention but are not represented in the map could disturb the map matching process. How the perception of complex real-world environments affects the map matching process still needs to be investigated. Still, one could assume that the effects observed in this experiment could be less pronounced in real-world environments because the salience of a single landmark and its map representation is less pronounced.
Finally, maps often represent more than one landmark in a map section. Due to the heterogeneity of VGI-based maps (Girres and Touya 2010), only some of these landmark representations may be significantly spatially inaccurate. If this is the case, other landmark representations could still be used to maintain successful map matching. Thus, how exactly one or some spatially inaccurate landmark representations affect map matching if other spatially more accurate landmark representations are available needs to be addressed in future studies.
Despite these mentioned limitations, the findings demonstrate that spatial inaccuracy of landmark representations in maps can jeopardize successful map matching and most likely also orientation and navigation performance. Therefore, finding ways for reducing the impact of spatial landmark pictogram inaccuracies on the map matching process seems to be a relevant topic for further research (cf. next paragraph).
3 Visualizing Spatial Uncertainty
In a second experiment, we aimed to assess ways to reduce the negative effect of spatial inaccuracies of landmark representations on map matching. According to Padilla et al. (2021), uncertainty concerning data quality is an issue of most data and can affect all kinds of decision-making. However, people may not be aware of these data quality issues. Thus, if map users do not consider during navigation that some landmark representations may be more or less spatially accurate, they could interpret a map as representing another spatial environment and not the currently perceived one. Pang et al. (1997) argue that by visualizing data uncertainty, people are provided with important information of data quality and can therefore make more informed decisions. However, according to Mason et al. (2016), there is a “lack of comprehensive and generalizable empirical studies across the entire domain of uncertainty visualization.” Therefore, we investigated the effects of visualizing uncertainty concerning the correct location of map-based landmark representations on map matching. For this purpose, the uncertainty visualization variables transparency and size were selected and manipulated based on suggestions of MacEachren (1992) and MacEachren et al. (2005). Furthermore, an uncertainty area visualization already used by the commercial map provider Google Maps to visualize uncertainty of GPS locations was investigated and compared to the other visualizations as well (see Fig. 9.4).

Visualizations for spatial uncertainty. Pictogram transparency (left), size (middle), and circular (transparent) uncertainty areas (right) were used to visualize uncertainty concerning the correctness of the landmark pictogram location
The stimulus design was the same as in the first experiment, with one exception. In addition to the control condition with the unmodified landmark pictogram, three different visualizations for spatial landmark uncertainty were compared in a within-subject design. In four sets of twelve trials, participants either saw a map with an unmodified landmark pictogram (control condition), a transparent pictogram, a pictogram with modified size, or a pictogram with a circular transparent uncertainty area (see Fig. 9.4). The level of transparency, the size of the landmark pictogram, or the uncertainty area was linked to the spatial inaccuracy of the landmark pictogram in the map. Again, participants used a continuous scale ranging from 0 to 1 after each trial to indicate to what extent they perceived the map as matching the 3D environment. For more study details, see Keil et al. (2022b).
The results demonstrate that participants are less likely to perceive a mismatch between the 3D environment and the map (mismatches represented by low perceived match scores), if the size of the landmark pictogram was modified or if an uncertainty area was added around the landmark pictogram to illustrate uncertainty (see Fig. 9.5). However, adding transparency to the landmark pictogram did not lead to fewer perceived mismatches between the 3D environments and the maps compared to the control condition. Figure 9.6 shows that if pictogram size or uncertainty areas are used to communicate uncertainty concerning the correct location of the landmark representation, a larger landmark inaccuracy was accepted by the participants to still be perceived as a match between the 3D environment and the map. Based on this result, it seems that in map matching (i.e., comparison of map and 3D space), the size of the pictogram or the size of the uncertainty area placed around the pictogram are particularly suitable for depicting spatial uncertainty. These two pictogram variants seem to support the processing of uncertainty by map users significantly better than, for example, the also tested transparency representations of pictograms.

Perceived match per landmark pictogram condition. Participants significantly less often perceived a mismatch between the 3D environment and the map representation (mismatches represented by low perceived match scores) when potential spatial inaccuracies of landmark representations were visualized by increasing the landmark pictogram size or by adding a circular uncertainty area

Relation between inaccuracies of the landmark representation in the map and the perceived match between the 3D environment and the map per landmark pictogram condition. When uncertainty concerning the correct location of the landmark representation in the map was visualized by increasing the pictogram size or adding a circular uncertainty area, higher values of spatial landmark pictogram inaccuracy were required for participants to perceive a certain mismatch between the map representation and the represented 3D environment
Based on these initial findings, we conclude that uncertainty visualization can be used to reduce the negative effects of spatial inaccuracies of landmark representations in maps on map matching. Especially, modifying the size of pictograms as suggested by MacEachren et al. (2005) and adding transparent uncertainty areas around the landmark pictogram proved to communicate spatial uncertainty effectively and to improve successful map matching. It seems likely that an explanation for the fact that adding transparency to landmark pictograms did not prove to be effective in communicating spatial uncertainty needs to consider the difficulties to registering different transparency levels of our map users in the experiment, as only one landmark pictogram was visible simultaneously.
Concerning the generalizability of these findings, two issues need to be addressed. First, Fig. 9.6 reveals a data artifact for extremely high landmark inaccuracy values in the size condition (green line). Opposed to the other visualizations, uncertainty increased when spatial inaccuracy values were extremely high. This particular artifact might be explained by the fact that pictogram size in this condition was directly linked to the spatial inaccuracy of the landmark pictogram. Thus, if the spatial inaccuracy was extremely high, the pictogram was extremely large and covered large areas of the map. However, if the pictogram gets too large, it will make the map unreadable, and map matching will become impossible. This artifact demonstrates that, as also stressed by Kinkeldey et al. (2014), new ways to visualize uncertainty call for studies to investigate their usability. Potential usability issues of the addressed uncertainty visualizations need to be identified in further extensive series of usability tests to ensure that the general map reading ability is not impaired. For example, as a consequence of the identified data artifact, maximum values for the pictogram size could be defined.
The second issue is related to the values used to control the intensity of the uncertainty visualization. In this experiment, the spatial inaccuracy of the landmark representations was used to control the transparency or size of landmark pictograms or the uncertainty area around the pictogram. In a real application scenario, however, these values would not be available. If precise information concerning the correct landmark location would be available, then in most cases, the errors could easily be corrected, and an uncertainty visualization would not be required. Instead, measures for uncertainty based on the available metadata related to VGI contributions need to be developed, or average inaccuracy values need to be estimated and applied to the uncertainty visualization. For example, an uncertainty score could be calculated based on the number and spread of VGI contributions linked to a specific landmark pictogram, the number of contributions of a contributor, or the number of corrections linked to the contributions of a contributor. The development of such uncertainty value calculations and their evaluation in applied user studies are subject to future research.
4 Conclusion and Outlook
The studies reported above provide first insights into how spatial inaccuracies of landmark representations in maps affect map matching. Our first study demonstrates that spatially inaccurate landmark representations reduce the likelihood of successful map matching. This could create problems for real-world orientation and navigation, especially in VGI-based maps, due to their great heterogeneity in terms of data quality (Girres and Touya 2010; Rousell and Zipf 2017). In a second study, we were able to show that by visualizing uncertainty concerning the spatial accuracy of landmark representations, the negative effects on map matching can be reduced. Especially modifying the size of landmark pictograms as suggested by MacEachren et al. (2005) or adding uncertainty areas as used in Google Maps proved to maintain successful map matching at higher levels of spatial landmark inaccuracies. We argue that it is this visualization of spatial uncertainty that provides the information required for more informed decision-making (Padilla et al. 2021; Pang et al. 1997).
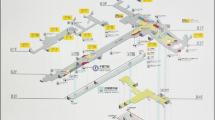
In future studies, the generalizability of the identified relation between spatial inaccuracies of landmark representations and map matching to real-world environments needs to be investigated. As previously argued, it is assumed that the negative effect on map matching will be less pronounced in real-world environments compared to the virtual 3D environment used in the first experiment of our SPP 1894 sub-project. The higher complexity of real-world environments should provide both more spatial reference points that are represented in maps and further distractors (like persons, building facades, cars, etc.) that are not represented in maps. Both the additional spatial reference points and the distractors are expected to compete with the landmark representations for visual attention. In consequence, this distribution of attention across more objects is assumed to reduce the relevance of the landmark representations for map matching. To test this assumption, it is necessary to conceptually extend the experiment design of the two studies reported above (see Keil et al. 2022a,b). Instead of using virtual 3D scenes in the map matching task, 360-degree images of real-world scenes with landmarks that are also included in the corresponding OSM map section may be tested (see Fig. 9.7).

Map matching with 360-degree photos. Due to the higher number of real-world distractors and spatial reference points in the maps obtained from OSM (Ⓒ OpenStreetMap contributors), effects of spatial landmark inaccuracies in the maps are assumed to be less pronounced compared to experimentally fully controlled virtual environments
In addition, to investigate the effect of map scale on the relationship between spatial inaccuracy of landmark representations and map matching, in future studies, different map scales should be used. It is expected that the results of such studies will not only provide a deeper understanding of the role of individual landmark representations for map matching in the context of spatial inaccuracies in real-world environments. They will also provide new findings on the effects of different map scales and potential usability issues of the used uncertainty visualizations in widespread maps as OSM.
Furthermore, potential ways to quantify spatial uncertainty based on available OSM metadata need to be explored, developed, and tested. This will allow visualizing different levels of uncertainty based on the suggested data quality levels of different OSM map regions. Finally, the effects of the uncertainty visualizations on orientation ability and navigation performance (i.e., real-world map matching) also need to be investigated with regard to different target groups. The results can not only provide detailed information on how spatial inaccuracies of landmark representations in maps affect map matching. They will also show how successful map matching can be maintained by providing map users with information about the uncertainty of map content to support more informed decision-making.
References
Anacta VJA, Schwering A, Li R, Muenzer S (2017) Orientation information in wayfinding instructions: evidences from human verbal and visual instructions. GeoJournal 82(3):567–583
Barrington-Leigh C, Millard-Ball A (2017) The world’s user-generated road map is more than 80% complete. PloS One 12(8):e0180698
Bégin D, Devillers R, Roche S (2013) Assessing volunteered geographic information (vgi) quality based on contributors’ mapping behaviours. Int Arch Photogramm Remote Sens Spat Inf Sci 2013:149–154
Bestgen AK, Edler D, Kuchinke L, Dickmann F (2017) Analyzing the effects of vgi-based landmarks on spatial memory and navigation performance. KI-Künstliche Intelligenz 31(2):179–183
Claramunt C, Winter S (2007) Structural salience of elements of the city. Environ Plann B Plann Des 34(6):1030–1050
Degrossi LC, Porto de Albuquerque J, Santos Rocha Rd, Zipf A (2018) A taxonomy of quality assessment methods for volunteered and crowdsourced geographic information. Trans GIS 22(2):542–560
Flanagin AJ, Metzger MJ (2008) The credibility of volunteered geographic information. GeoJournal 72(3):137–148
Girres JF, Touya G (2010) Quality assessment of the french openstreetmap dataset. Trans GIS 14(4):435–459
Goodchild MF (2007) Citizens as sensors: the world of volunteered geography. GeoJournal 69(4):211–221
Keil J (2021) The salience of landmark representations in maps and its effects on spatial memory. doctoralthesis, Ruhr-Universität Bochum, Universitätsbibliothek. https://doi.org/10.13154/294-8216
Keil J, Edler D, Dickmann F, Kuchinke L (2022a) Uncertainties in spatial orientation: Critical limits for landmark inaccuracies in maps in the context of map matching. KN J Cartogr Geogr Inf, 1–12. https://doi.org/10.1007/s42489-022-00105-7
Keil J, Edler D, Kuchinke L, Dickmann F (2022b) Visualization of spatial uncertainty improves map matching. Abstr ICA 5:55. https://doi.org/10.5194/ica-abs-5-55-2022. https://www.abstr-int-cartogr-assoc.net/5/55/2022/
Kiefer P, Giannopoulos I, Raubal M (2014) Where am i? Investigating map matching during self-localization with mobile eye tracking in an urban environment. Trans GIS 18(5):660–686
Kinkeldey C, MacEachren AM, Schiewe J (2014) How to assess visual communication of uncertainty? A systematic review of geospatial uncertainty visualisation user studies. Cartogr J 51(4):372–386
MacEachren AM (1992) Visualizing uncertain information. Cartogr Perspect (13):10–19
MacEachren AM, Robinson A, Hopper S, Gardner S, Murray R, Gahegan M, Hetzler E (2005) Visualizing geospatial information uncertainty: what we know and what we need to know. Cartogr Geogr Inf Sci 32(3):139–160
Mason JS, Klippel A, Bleisch S, Slingsby A, Deitrick S (2016) Special issue introduction: approaching spatial uncertainty visualization to support reasoning and decision making. Spat Cogn Comput 16(2):97–105
Olteanu-Raimond AM, Hart G, Foody GM, Touya G, Kellenberger T, Demetriou D (2017) The scale of vgi in map production: a perspective on european national mapping agencies. Trans GIS 21(1):74–90
Padilla L, Kay M, Hullman J (2021) Uncertainty visualization. Wiley, New York, pp 1–18. https://doi.org/10.1002/9781118445112.stat08296. https://onlinelibrary.wiley.com/doi/abs/10.1002/9781118445112.stat08296
Pang AT, Wittenbrink CM, Lodha SK, et al (1997) Approaches to uncertainty visualization. Vis Comput 13(8):370–390
Peebles D, Davies C, Mora R (2007) Effects of geometry, landmarks and orientation strategies in the ‘drop-off’orientation task. In: International Conference on Spatial Information Theory. Springer, pp 390–405
Roskos-Ewoldsen B, McNamara TP, Shelton AL, Carr W (1998) Mental representations of large and small spatial layouts are orientation dependent. J Exp Psychol Learn Mem Cogn 24(1):215
Rousell A, Zipf A (2017) Towards a landmark-based pedestrian navigation service using osm data. ISPRS Int J Geo-Inf 6(3):64
Schiewe J, Schweer MK (2013) Vertrauen im rahmen der nutzung von karten. KN J Cartogr Geogr Inf 63(2):59–66
See L, Estima J, Pődör A, Arsanjani JJ, Bayas JCL, Vatseva R (2017) Sources of VGI for mapping. Ubiquity Press, London, pp 13–35. https://doi.org/10.5334/bbf.b
Senaratne H, Mobasheri A, Ali AL, Capineri C, Haklay M (2017) A review of volunteered geographic information quality assessment methods. Int J Geogr Inf Sci 31(1):139–167
Skopeliti A, Antoniou V, Bandrova T (2017) Visualisation and communication of vgi quality. Mapping and the citizen sensor. Ubiquity Press, London, pp 197–222
Van Exel M, Dias E, Fruijtier S (2010) The impact of crowdsourcing on spatial data quality indicators. In: Proceedings of the GIScience 2010 Doctoral Colloquium, Zurich, Switzerland, pp 14–17
Zhang H, Malczewski J (2017) Accuracy evaluation of the canadian openstreetmap road networks. Int J Geospat Environ Res 5(2). https://dc.uwm.edu/ijger/vol5/iss2/1/
Acknowledgements
This research was supported by the German Research Foundation DFG within Priority Research Program 1894 Volunteered Geographic Information: Interpretation, Visualization and Social Computing (VGIscience, Landmark Uncertainty, DI 771/11-2, KU 2872/6-2).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2024 The Author(s)
About this chapter

Cite this chapter
Keil, J., Dickmann, F., Kuchinke, L. (2024). Addressing Landmark Uncertainty in VGI-Based Maps: Approaches to Improve Orientation and Navigation Performance. In: Burghardt, D., Demidova, E., Keim, D.A. (eds) Volunteered Geographic Information. Springer, Cham. https://doi.org/10.1007/978-3-031-35374-1_9
Download citation
DOI: https://doi.org/10.1007/978-3-031-35374-1_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-35373-4
Online ISBN: 978-3-031-35374-1
eBook Packages: Computer ScienceComputer Science (R0)