
Abstract
When disasters such as floods or earthquakes occur, we may not have a support of regular infrastructure based networks. This proves fatal because people who are trapped can not be easily located by search and rescue team. In such cases, airborne network consisting of miniaturized drones can be extremely beneficial in providing quick and effective coverage of the affected area, in an on-demand manner providing instant insights to rescue teams. While the challenges offered by such networks are plenty, the ongoing research and development shows promise to make such a technology more reliable and effective. In this paper, we discuss various disaster events in which network of drones can play a vital role in offering support to rescue operations. Mainly, the article discusses the protocols proposed by researchers for various layers of protocol stack including physical layer, data link layer, network layer, transport layer, application layer along with clustering protocols, time synchronization protocols and localization protocols. Finally, a brief summary of software simulation platforms and testbeds, along with future trends of Flying Ad-hoc networks have been provided.
Similar content being viewed by others


1 Introduction
In Flying Ad-hoc network (FANET), one of the unmanned aerial vehicles (UAVs) can be directly connected to the infrastructure while the other UAVs in the system might have a multi-hop communication where each node serves as a relay as well as data collecting node [1]. The entire FANET network system can be operated or controlled autonomously on the basis of pre-planned flight plans. They can be flown by an electronic equipment adapted to the vehicle and on a Ground Control Station (GCS). It is common to associate the vehicle with the term Remotely Piloted Vehicle (RPV), since the vehicle is remotely piloted and operated by radio-controlled devices [2]. In the literature other terms also indicate such categories of vehicles, such as: Drone or ROA (Remotely Operated Aircraft) and the network of multiple such vehicles in the air is termed as FANET or unmanned aerial system (UAS) [3]. So,the complete network topology of the FANET system is shown in Fig. 1. Figure 1 depicts that messages or data can be exchanged between the Ground Station (GS) and a UAV or between the UAVs within the network by the means of network interface [4]. As FANET architecture is an ad hoc communication architecture, it provides connectivity without the need of infrastructure.It also helps in establishing the network and provides real time communication within the network in areas where the connectivity has been hampered or not been available [5]. There are three types of network architectures for FANETs namely, UAV ad-hoc network, Multi-Group UAV Ad-hoc Network and Multi-Layer UAV Ad-hoc Network that has been proposed in [6] and are elaborated below:

Architecture of Flying Ad-hoc Network
-
1.
UAV Ad-hoc Network In an UAV ad-hoc network, individual UAV contributes towards data forwarding process in the network, as shown in Fig. 1. In this particular framework, the backbone UAV acts as a link between the Base Station (BS) and the member UAVs.The backbone UAV is generally fitted with two radios: a low-power short-range and a high-power long-range radio. A low-power short-range radio is used to communicate among drones, and a high-power long-range radio is needed to connect to the BS. Since only one backbone UAV is connected with the BS in the UAV ad-hoc network framework, the transmission range provided by the network is substantially extended. Consequently, this network topology is best suited for surveillance, surveillance operation and other missions where a small number of homogenous UAVs are required for deployment.
-
2.
Multi-Group UAV Ad-Hoc Network As depicted in Fig. 1 the ad-hoc multi-group UAV network is mainly an integration of swarm UAV network and a centralized network system architecture. In this architecture, the backbone UAV of each group is further connected to the Base Station(BS) in a centralized manner, forming an ad-hoc network. Intra-group communication is carried out without the use of a BS within the ad hoc UAV network, while cross-group communication is carried out using the backbone UAV. This network design is appropriate for missions that require the deployment of a wide variety of UAVs. However, due to its semicentralized nature, the network design lacks stability.
-
3.
Multi-Layer UAV Ad-Hoc Network The multi-layer UAV ad-hoc network, which is represented in Figure 1, is another framework for integrating numerous groups of heterogeneous UAVs. In this architecture, networking between member UAVs within a particular group constitutes an ad hoc network of UAVs. The backbone UAVs of all groups are connected to each other in ad hoc manner. However, only one backbone UAV from a group is further connected to the BS. As a result, this architecture is adapted to missions involving a large number of heterogeneous UAV.
Over the past few decades, the development of UAV has opened new opportunities for agricultural remote sensing. Precision agriculture, which is generally accompanied as a system in which the management process is done at the perfect time, the right location, and even with the optimal intensity, is one of the most prominent applications of UAVs. Furthermore, because of the merits of UAVs, such as their simplicity of cognitive processing and great adaptability, they can provide a fast and effective way to extract phenotypic information on diverse crops in farms. Agricultural UAVs are also useful in areas where ground-based equipment struggle to carry out farming activities. Although agricultural UAVs have demonstrated significant benefits and features in reality, their level of AI still requires optimization and refinement in a number of areas, including data collecting, management systems, and safety considerations [7, 8].
In the recent decade, UAVs have become an important technology to enforce protection and surveillance systems due to their dependability and potency [9]. For example, UAVs equipped with a camera can be used in traffic surveillance to monitor roads and collect traffic data in order to amend the road safety. This data is the basis for traffic control and management, as well as transit planning. Moreover, UAVs can fly in dangerous conditions such as very bad weather conditions or evacuation conditions to obtain surveillance data in actual time [10].
In the last decade, UAVs have attracted too much attention from both industry and academia, especially due to their importance and possibilities in military applications. UAVs improve accessibility and connectivity for military applications [11]. For instance, they can be fortified with live video communication to weapons or ground troops to protect the spirits of military soldiers. Moreover, UAVs can be fitted with gyro stabilized electro-optical and thermal infrared cameras to be utilized by military forces for the target acquisition and reconnaissance and surveillance-related tasks. Besides the payloads for military purposes, they are also suited for civil applications such as border security and search and rescue in emergencies [12].
The main use cases of UAVs involve emergencies such as disaster management [13]. UAVs play a significant role to boil down the adverse repercussions of catastrophes by assisting essential aid in the rescue operations. They may have access to calamity zones where people are unable to gather information for search and rescue in the event of a disaster. UAVs, due to their flexibility and mobility, can be employed to provide wireless coverage to the devices in disaster areas for the use of rapid service recovery after tragedies. Additionally, UAVs can transport medical supplies to areas that have already been devastated without human interventions. In Sect. 2, we provide the details of possible applications of FANET in disaster management and in search and rescue operations.
2 Disaster Management
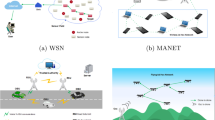
Large-scale natural disasters measure the most basic human survival instinct by inflicting life and property with major, and sometimes unpredictable, losses. Various different forms of natural disaster such as earthquake, tsunami, landslide, forest fire and so on have caused losses not only in terms of material but also in the lives. This recognizes the need to strengthen disaster resilience, and the need of Wireless Sensor Network (WSN) technology and UAVs to improve the ability to predict, evaluate and respond to disasters [14]. Researchers have found that FANETs can serve as one of the most powerful tools, during the time of any natural disaster. It can help in many ways, such as finding the location of the camp, assessing damage and relief operations. As we know that during any disaster, there is limited or almost negligible land mode of transportation and communication, so at that time it is only the UAVs network system that can be leveraged because UAVs can fly as low 30 m above the ground and therefore act as a handy feasible tool for monitoring the area, assessing the severity of the situation, rescuing the trapped people and so on. The Ad-hoc network and UAV supported disaster applications that are considered in this domain are: (a) tracking, forecasting and early warning systems, (b) fusion of disaster information, (c) situational awareness and logistics, (d) assessment of damage, (e) search and rescue missions [13]. The various applications of the FANETs system has depicted in Figure 2. It illustrates that UAVs can help in managing as well as monitoring any disaster such as Flood, Earthquake, Search and Rescue (SAR) operations, and Pandemic situation. This section focuses on a detailed review of UAV-based Disaster Management applications.
2.1 Forest Fire
Wildfire or the forest fire is one of the world’s most costly and deadly natural catastrophes. It’s instant impact includes the devastation to millions of hectares of forest resources, evacuation of thousands of people, burning of houses, loss of infrastructure, and, most significantly, danger to people’s lives. It may also cause damage in the different forestry activities that generate wood fiber and biomass fuels and other types of agriculture, destroying habitats along with its adverse effects on the quality of water and other environmental services. It is very difficult to monitor, control, survey the forest fires or wildfires with human involvement. Searching and rescuing the people from the risky fire zone is also challenging. Various technologies, including ground sensors, Remotely Riloted Vehicles (RPV) or satellite imagery, have been utilized for detection and monitoring the forest fire. However, these techniques do not provide an effective solution for detecting and tracking wildfires [15, 16].

Applications of FANET
This motivates researchers to develop a FANET based forest fire monitoring system for remote and hard to reach areas. This network system uses autonomous UAVs with the key benefit of providing on-demand surveillance services than existing approaches that use satellite imagery and manned aircraft. After reviewing the advantages of the FANET technology, the state forest department of India have started deploying the system with the aim to gather images along the fire perimeter and upload the position of the fire perimeter to the nearest base station as regularly and with as little latency as possible.
The recent forest fire in Uttarakhand, India which occurs in May 2019, has been massive in the history of this state.
This wildfire has burned 1,682,800 m2 and 1,892,500 m2 of forest land in the Nainital, Almora district of Uttarakhand respectively. In order to rescue from the wildfire, the state forest department of Uttarakhand has deployed FANETs system. The UAVs were equipped with the announcement system to create awareness among the locals so that they can handle the situation effectively. This system has helped in checking the instances of fire and also provides the helpline numbers and other contact details that can be used for assistance during this fire break out [17]. So, the use of the FANETs system in this disaster has proved to be a feasible solution for rescuing the people. By using the image processing or remote sensing tools and methodologies we can do the post disaster damage assessment of the forest by using all the images which are captured by the UAVs. As a result, these UAV assisted network devices are being used to control, monitor, assist the forest fires.
Recently, UAVs have acquired an important role for detection and monitoring of forest-fires and gas/chemical plumes [18]. Generally, UAVs act as sensor nodes which can either remain stationary or move slowly around the areas of interest, i.e. areas where there is a higher probability of fire or gas. When an event is detected by UAV, the other UAVs should change formation, through a collaborative system, and move towards the event fringe to monitor it. During these situations, the connectivity between UAVs is a prerequisite.
2.2 Flood
The most prominent natural disasters are floods, making thousands of fatal accidents worldwide each year. When these events occur, they are considered to be dangerous or deadly due to its short time span. With advance alertness, most of these types of casualties could be prevented, but still monitoring it in real time is very critical. Therefore, the use of FANET can be an effective solution to monitor and gather all critical flood-related details [19, 20].
In India, drones were used during the Uttarakhand floods in 2013 [21] and subsequently during the Kerala floods in 2018 by the National Disaster Management Authority (NDMA) [22]. This multi-UAV network can capture the real time high resolution images of disaster zones. It covers the large areas producing vast amounts of data and transfers the information to nearby rescue teams in a very less time. This allows the emergency teams to map all the disaster areas from the remote locations that ultimately helps them in performing risk and damage assessment promptly. It also facilitates real-time identification or tracking of the individual and enables faster and safer search and rescue operations. As a result, FANET is a reliable and feasible solution for monitoring the floods. Moreover, it also accelerates the relief operations while providing a more targeted response.
2.3 Pandemic Situations
The FANETs network system plays a vital role during any pandemic times [23]. UAVs provide major benefits over conventional methods of operations. They decrease physical risks while reducing response time and costs drastically. They also help to strengthen the safety during any pandemic situations. These UAVs can reach as low as above the ground where normal airplanes can’t. In terms of service and maintenance, they have a major cost advantage. Recently, UAVs or drones are being used for vital services during Covid-19 pandemic [24]. The services and operations include the control of locust, the disinfection of polluted areas, thermal scanning of fever detection groups, information broadcasting and so on. Also, to resolve supply chain shortages, UAVs have been used to transport emergency medical supplies, first aid and critical food products to remote and inaccessible areas.
FANET is made up of many UAVs that collaborate to monitor the hazardous area and also helps in rescuing the people from the danger zone. UAVs must constantly retransmit, or relay messages through the wireless channel in order to ensure that each UAV understands the condition of the FANET network. This is performed to maintain the coordination between the UAVs. The advantages of FANET is that these systems are highly mobile and efficient in nature and also have the ability to carry payloads such as cameras, sensors along with the built in navigation system and other safety features. It makes it easy to guide, search and rescue people from the inaccessible regions. Thus, nowadays different organizations have started using the FANETs network during natural calamities [25]. Some of these examples of integrating the FANET in rescue operations from large-scale disaster events include (a) natural disasters of Indonesia [26, 27], (b) earthquake of Nepal [28, 29], (c) forest fire of Dehradun [30] and (d) forest fire of California [31].
3 Peculiar Characteristics of FANET System
With the rising interest toward using FANET networks for different applications, different architectures to coordinate the simultaneous flights of UAVs and drones have been used by various researchers. The architecture design varies based on the application, expected quality-of-service (QoS), and type of UAVs. In a FANET system, we may have a heterogeneous set of UAVs and sensors, and failure of one UAV is expected not to affect the whole mission. To allow easy deployment of the system, human intervention should be minimized. Unlike other systems, FANET system does not rely merely on a centralized base station control for navigation or coordination. Each UAV in the network is capable of performing tasks independently. At the same time, we expect all UAVs to be able to share their metadata (e.g., locations, states, and images) with direct communication among themselves [32].
In FANET, UAVs have two core features: relaying communications between UAVs and UAVs (U2U) and retrieving network data. Furthermore, UAVs can perform two additional functions:they can act as remote support units, extending infrastructure coverage and establishing a complicated network of independent resources. Moreover, two networking modes are always activated in a FANET architecture based on the role of UAVs: UAV-to-UAV (U2U) and UAV-to-Infrastructure (U2I). Therefore, one of the drones is called the backbone drone because it serves as a portal in the FANET system framework. The backbone UAV gathers information from the member UAVs (via U2U) and then transmits it to the Ground Station (GS) mostly through U2I communication. Thus, the use of FANET for a variety of services such as data transmission and network communication is challenging, particularly in terms of energy efficiency and QoS [33, 34].
FANET is a specialized variant of ad-hoc networks with specific technical constraints such as node mobility, scalability of the network, network topology, robustness and synchronization among the UAVs [35]. The various features like node mobility, radio propagation and topological changes of the FANET system and the details are described in Sects. 3.1, 3.2 and 3.3 respectively.
3.1 Node Mobility and Mobility Models
UAVs travel at speeds between 30 to 45 m/s, creating a significant challenge in terms of maintaining data links and coverage quality [36]. FANETs have a relatively long internode distance as compared to the available ad hoc network technologies. Due to the extreme mobile nodes, any change in the topology creates severe communication constraints. To mitigate the restriction of node mobility, numerous mobility models have been proposed. A multi-UAV system’s speed and location variation can be addressed by using mobility models. In a delimited scenario, a mobility model illustrates the mobility of nodes in a network,(i.e., variations in the position, speed). According to the deployed mobility model, it enables nodes to respond to the requirements of each application, increasing dynamism and improving efficiency of the network. In addition, researchers can also use mobility models to emulate FANETs more effectively. Even though nodes in FANETs are highly mobile, selecting the appropriate mobility model for each simulation scenario is critical for analysing network efficiency before a real implementation and achieving as realistic results as possible [37]. A brief review of the various mobility models used in FANET system are given in the following subsections.
3.1.1 Randomized Mobility Models
The most basic and widely used models for simulating the movement of a node in an ad hoc network are random mobility models. Each node chooses its own path, velocity, and duration, without any consideration from the other nodes. Within this category, the following mobility models are distinguished: Random Walking, Random Waypoint, and Random Direction. For example, in the Random Way Point model (RWP) each node selects its destination within the simulation region and its speed S ranges between “[Smin, Smax]” at random. In addition to that, the node starts moving at a moderate speed towards the destination, and once there, it seems stable for a particular time “Tpause” [38].
3.1.2 Path-Planned Mobility Models
These mobility models are characterized by nodes following a pre-calculated trajectory without taking any random direction. The nodes are made to follow a sequence of movement patterns, that vary at irregular intervals amongst each model’s distinct patterns. The Semi-Random Circular Movement (SRCM) and Paparazzi models are both included in this category (PPRZM). The former (SRCM) is a good model for simulating the activity of UAVs that collect data by flying around a location in circles with varying radius. The latter (PPRZM) is a stochastic mobility model based on the Paparazzi autopilot software for UAV. This Paparazzi autopilot presents five possible movements: Stay-At, Eight, Way-Point, Scan, and Oval. Thus, the PPRZM mobility model is based on a state machine where each state is one of the possible movements that a UAV can do [39, 40].
As a result, mobility models are frequently employed in both cellular and ad-hoc networks to analyse newly established algorithms or protocols. Due to the agile movement of UAVs, the selection of a proper mobility model is necessary in FANET to produce results with optimum precision and conformity.
3.2 Radio Propagation Model
FANET network architecture supports Line-of-Sight (LoS) communication with little provisions for NLoS communication between sender and receiver. NLoS highlights the uniqueness of FANET. In addition, understanding the features of the radio network is essential for preparing and implementing in FANETs. Also, for estimating the power acquired in an aerial network from a drone to a base station (or vice versa) or from two UAVs requires unique channel modelling for each instance, by taking into consideration the unique propagation qualities of such networks, such as the high chance of a direct ray, ground reflection effects, 3-D aircraft rotation impacts (roll, pitch, and yaw), changes in atmospheric features, or fluctuations in distance between nodes. So, scientists have developed a number of theoretical, empirical, and semi-empirical methods to approximate a channel loss mechanism under which electromagnetic radiation is attenuated as a result of these properties [41].
3.3 Topology Changes
The structure of the FANET is based on node mobility and density. Variations in inter-nodal distances enable the system’s topology to change, resulting in a topological update. A topological update is performed whenever a UAV is deleted or added to an existing system.Link problems and ineffective communication are major research concerns.
FANET has more unique features and functions, and has the potential to play a significant role in different applications. These distinct characteristics create a set of requirements that must be considered in order for it to be deployed effectively. It can have a layered structure architecture that includes physical layer, data link layer, network layer, transport and application layer. The scientific research in the layer architecture of FANET technology has gained attention because of the escalation in demand of UAVs in various different applications. In Sect. 4, we discuss and review the protocol stack layer challenges and emerging solutions for the same.
4 Protocol Stack Development of Flying Ad-Hoc Networks
Network designer has to choose an appropriate type of network architecture based on the requirement of applications and availability of resources at hand. A still larger challenge has been in terms of protocol stack development. Ideally, the network protocol stack has been expected to be application-aware leading to optimal network performance with efficient use of resources. The protocol stack of FANETs consist of five layers namely: Physical, Data Link, Network, Transport and Application Layer respectively. The study of the design and development of various protocols to different layers of the FANET protocol stack has been briefly described in Sect. 4.
4.1 Physical Layer
The first Layer in the FANET Protocol Stack is Physical Layer. This layer deals with the signal propagation from UAV-2-UAV and UAV-2-Base Station (BS). The main concerned in this layer is antenna design as it affects the connectivity due to the variable distance between nodes. The network’s reliability is reflected in the antenna design. Because they transmit the signal in both directions, omnidirectional antennas have a performance issue. The signal is sent from the transmitter to the receiver using a novel directional antenna that prevents it from spreading in any other directions. Due to the higher channel capacity of radio waves, the propagation range of directional antennas is larger. To increase the communication range, real-time applications need lower data-packet latency at relay nodes [42]. This section examines the networking technologies used in FANET’s physical layer. As the networking systems consist of spectrum free bands, which ultimately results in providing the light-weight as well as cost-effective communication connections between nodes. The various communication technologies like: WiFi,Bluetooth, ZigBee and LTE are appropriate for FANET system and the description of all these technologies are given in the following subsections.
4.1.1 WiFi (IEEE 802.11)
Wireless Fidelity, and WiFi is a short-range networking technology consisting of a set of design specifications for WLANs (Wireless Local Area Networks) operating at the radio frequencies. The 2.4 GHz, 3.6 GHz, 5 GHz and 60 GHz are among the most widely used frequencies [43]. For several FANET applications, IEEE 802.11a/b/g/n/ac variants may provide the throughput needed for large-sized data transfers such as videos and images. A conventional Wi-Fi system has a transmitting range of about 100 meters. With the aid of ad-hoc networking between the UAVs, the transmitting range can be expanded up to several kilometres. In a standard 802.11 network, clients discover and connect with Wireless Local Area Networks (WLANs) based on announcements from Access Points (APs) [44, 45]. As a result, a number of researchers have measured Wi-Fi efficiency in terms of throughput, Received Signal Strength Indicator (RSSI), and the distance of a wireless connection from a UAV to GS. It’s also proposed that using a 802.11a wireless connection for UAV and GS is beneficial for FANET-based applications.
4.1.2 Bluetooth
Bluetooth operates on the unlicensed 2.4 GHz spectrum, which has a range of 10 to 200 metres. It’s hardware exists in a range of variants, with data rates varying from 1 to 3 Mbps. On the other hand, the high data rate is 24 Mbps. Bluetooth Low Energy (BLE) was introduced by the Bluetooth Special Interest Group (SIG) in the Bluetooth 4.0 specifications [46]. The main goals of Bluetooth 5 are to increase speed, range of transmission, energy consumption, and compatible with other short-range technologies. Furthermore, Bluetooth 5 is capable of broadcasting richer data that goes beyond positioning information and contains multimedia and URL files. Due to the major advancements, Bluetooth 5 seems to be a feasible candidate for the implementation of FANET system at such a reduced cost and with low power consumption in the future [47]. As a result,the Bluetooth based UAV technology now comprises one master and up to seven slave UAVs stations, according to researchers. The results indicate that Bluetooth-based FANET system provides efficient connectivity while using minimal computing resources [48].
4.1.3 ZigBee (IEEE 802.15.4)
This innovation is typically used in low-data-rate applications which necessitates long-lasting batteries and safe networking. It covers a range of 10 to 100 metres. It is less expensive and more convenient to use than Bluetooth and Wi-Fi. It has a data rate of 250 kbps and operates in the 2.4 GHz frequency band. It has 16 channels, each with a bandwidth requirement of 5 MHz [49]. ZigBee has been used for indoor localization and intra-cluster connectivity in FANET and may be a good choice for low-data-rate FANET applications [50].
4.1.4 Long Term Evolution (LTE)
LTE provides reliable wireless communication, mobility, and a high data rate, which can significantly improve control and protection.With scalable bandwidths up to 20 MHz, 15 MHz, 10 MHz and below 5 MHz, LTE is designed for IP. The paired spectrum Frequency Division Duplexing (FDD) as well as the unpaired spectrum Time Division Duplexing (TDD) are also supported. Even though it can achieve a fair performance within 30 km and have an adequate performance up to 100 km, the optimum cell size is 5 km [51]. As a result, a number of studies have shown the feasibility of FANET-based real-time video streaming and surveillance over the 4G-LTE network [52].
In accordance with the above review, we can say that the communication technologies such as Bluetooth, ZigBee, Wi-Fi or LTE can be considered for medium-range FANET applications depending on range and throughput needs. But to manage or control the link between all UAVs is essential and challenging. Therefore, Sect. 4.2 discuss the Medium Access Control (MAC) challenges or protocols that are designed by various researchers.
4.2 Data Link Layer
Data Link layer is the second layer of Protocol Stack. And, MAC is a sub-layer of the specified data link layer within the network protocol stack. This layer is mainly responsible for controlling access to shared support. And the protocols that are designed or introduced by the researchers at this layer plays a vital role in controlling and managing the shared communication medium among all the nodes in the network. Therefore, MAC protocol used in wireless sensor network provide self-organizing capabilities to the network by providing necessary infrastructure for hop-by-hop wireless communication. The important attributes of MAC layer protocols are energy efficiency, scalability, network throughput, fairness, latency, and bandwidth utilization [53].
A fundamental issue in the FANET system is that the network architecture changes continuously due to the fact that the UAV nodes are mobile, fly at various speeds, and in different directions. One of the most distinguishing features of FANET is its high mobility, which imposes significant restrictions on the MAC layer. The FANET frequently modify the quality of the connections because of their great mobility and the changing distances between the nodes. Additionally, any changes in link quality and failures have a direct impact on FANET MAC designs. Another design issue for the FANET MAC layer is transmission delay. There should be a minimum delay in transferring the packets, especially for real-time applications, and this creates the significant issues when designing MAC protocols for FANETs [54].
The various challenges such as: Energy Usage, Fairness, Variation in Link Quality, Optimal Channel Utilization or Packet Latency The taxonomy of the MAC protocols for UAVs is shown in Fig. 3. Figure 3 depicts that the various contention based, collision free and hybrid MAC protocols have been proposed by the researchers. Therefore, Sects. 4.2.1, 4.2.2 and 4.2.3 gives the brief overview of the various FANET based MAC protocols.
4.2.1 Contention Free MAC Protocol
Contention-free MAC protocols eliminate the issue of collisions in the network by preallocating the transmission resources to the nodes in the network. They are based on one of the three conventional techniques for scheduling wireless channels: Time Division Multiple Access (TDMA), Frequency Division Multiple Accesses (FDMA), or Code Division Multiple Access (CDMA). There are two types of MAC protocols based on allocations, such as CU-MAC (Centralized UAV Multiple Access Control) [55] and UD-MAC (UAV Delay-Tolerant Multiple Access Control) [56].
Researchers have proposed the CU-MAC [55] protocol for the fixed wing UAV Wireless Network. The CU-MAC protocol utilizes a mobility prediction based time-frame optimization scheme to overcome channel resource loss and provide reliable broadcast service for safety packets.

Taxonomy of MAC protocols used in FANET system
UD-MAC, the delay-tolerant multiple access MAC control for 3D UAVNs has been proposed in [56]. In this MAC protocol, UAV mobility pattern is used for constructing delay-tolerant transmissions. UAVs have limited power and they need to recharge at the control station. By using Store-Carry-Forward (SCF) method, a UAV can store and carry the data of other UAVs along with the returning path. The returning UAVs are discovered by the ground station through the Control and Non-Payload Communication links (CNPC). CNPC packets sent by UAV contain state information, GPS information, and Frame Check Sequence (FCS). These state information indicates whether the UAV is returning or not, and GPS contains the location, direction, and acceleration of the UAV.
4.2.2 Competitive or Contention Based MAC Protocols
The communicating nodes compete to access the shared medium through random access. The characteristic of this kind of MAC protocol is that all nodes share a channel, so it is necessary to have a competition mechanism between the nodes to establish the communication connection. Here, advantage is that these protocols do not need to implement the complex time synchronization and control scheduling algorithm. Moreover, in this it is not essential to save, maintain or share the state information. Furthermore, if topology is changed, these protocols may well adapt to the network system [67]. Typically, there are Sensor MAC (S-MAC) [57], Timeout MAC (T-MAC) [58], Pattern MAC (P-MAC) [59], Demodulation-Free random Access Control (DFRA) [60], Opportunistic ALOHA (O-ALOHA) [61] and Adaptive-Opportunistic ALOHA (AO-ALOHA) [62].
The Sensor-MAC (S-MAC) [57] protocol utilizes the synchronization intervals which are maintained at the cluster level, including periodic sleep-listen schedules configured in accordance with the synchronized intervals. A virtual cluster is formed by the neighbouring nodes, which establish a common sleep schedule for all the nodes in a virtual cluster. If two nodes are in distinct virtual clusters, they will only wake up during the listen times of both clusters. Also, considering the fact that sensor nodes in S-MAC must follow to two separate schedules, an increase in the energy consumption due to idle listening and overhearing is inevitable.
The researchers introduced the Time-out-MAC (T-MAC) [58] to address the S-MAC issue with unpredictable traffic loads. In T-MAC, synchronization during the listening periods within virtual clusters has broken, that is one of the main reasons for causing the early sleeping problem.The PMAC protocol [59], like S-MAC and T-MAC, provides a binary string including sleep wake information, where each character indicates the state of the node over a specific time period: 1 for listening, and 0 for sleep. When there is no information transmission inside the system, the nodes lower their listening time, and they can also predict the next activity of their neighbour. If the neighboring node wishes to communicate, it will enter the listening mode, which reduces energy loss. However, researchers have adapted and improvised the P-MAC protocol to enhance the network system’s energy efficiency or minimize the delay [68].
Also to overcome the challenges of S-MAC, P-MAC and T-MAC protocol, the DFRA-MAC [60] protocol for the UAV networks has been proposed by academicians. The DFRA aims to help UAVs to join in the group of network created by UAVs without demodulating the property field of MAC header. DFRA exploits Adaptive Feature Extraction Algorithms (AFEA) and a Machine Learning Classifier (MLC). In the AFE algorithm, a UAV first senses the channel and receives signal strength of samples, and then adjusts the discretization threshold based on the samples. Support Vector Machine (SVM) is used for spectrum sensing, modulation classification, power allocation, and user identification.
In comparison to S-MAC, T-MAC, P-MAC, and DFRA, Opportunistic ALOHA (O-ALOHA) [61] is a framework that includes channel state information into the ALOHA protocol enabling sensor nodes with mobile agents. And when the mobile agent sends a beacon, in that interval each sensor starts calculating its fading status. In the domain of cross layer design for UAV-based wireless sensor networks, numerous studies have been conducted on the O-ALOHA system. Moreover, O-ALOHA has also been deployed effectively in other FANET network systems [69].
An UAVs has an ability to collect data consistently from ground sensors that are deployed in a random manner, Adaptive-Opportunistic ALOHA (AO-ALOHA) [62] employs a priority-based method for assigning the channel as well as avoiding the collision, and the most importantly, the priority may get modified dynamically depending on the position and dispersion of the sensors. But unlike Opportunistic ALOHA protocol, the Adaptive-Opportunistic ALOHA framework incorporates a handshake within each time period of data transmission to improve throughput while maintaining an acceptable system bit error rate.
4.2.3 Hybrid MAC Protocols
The hybrid MAC protocols combine the advantages of contention free and contention based MAC protocols on demand. Contention-based protocols adapt easily to changing network scenarios and are better suited for networks with low loads. Nevertheless, they do not perform well when the node density increases in the network. On the other hand, contention-free protocols eliminate collisions and have better channel utilization at higher loads. However, they also face some challenges in the synchronization of allocated resources.
Therefore, the hybrid MAC Protocol for UAV system has been discussed by the researchers in [70]. These protocols include: Location-Oriented Directional MAC protocol (LODMAC) [63], FANET multi-channel MAC protocol (FM-MAC) [64], collision coordination-based MAC protocol (CC-MAC) [65] and collision-free MAC protocol (CF-MAC) [66]. Therefore, this subsection gives the brief summary of all those hybrid protocols which are illustrated in Fig. 3.
Researchers has introduced LODMAC [63] MAC protocol for switched beam directional antennas. This protocol eliminates the range asymmetry because all of the control, location and data packets are transferred directionally. Also, with the usage of switched beam directional antenna communications, the transfer range is increased which results in reduced hop counts and average network delays. The proposed LODMAC protocol characteristics have been coded and modified for making its use in 3D environments.
A multi-Channel MAC protocol for FANETs (FM-MAC) [64] has been introduced by academicians. FM-MAC combines the advantages of the multi-channel and directional antennas. Basically, this protocol aims to provide different QoS for safety and service packets. In FM-MAC, researchers proposed a mobility prediction based channel reservation method, which can address the serious link interruption. UAVs’ position is obtained by the directional antennas. But this FM-MAC protocol has high localization error.
To overcome the localization error, researchers propose a hybrid Collision Coordination-based MAC protocol (CC-MAC) [65]. CC-MAC protocol is integrated with CSMA/CA and TDMA protocols. To design this protocol, authors considered a swarm of UAVs in two categories: A master of node and anchor of nodes, where anchor nodes are used to collect the data and master nodes are used as a gateway to transmit the data. This protocol aims to coordinate data transmission between nodes, so more than one node can transmit data simultaneously without any collision.
But the CC-MAC protocol is not suitable for the dense UAV network.Therefore, a hybrid Collision-Free MAC Protocol (CF-MAC)[66] for the dense UAV networks has introduced by researchers. The CF-MAC is combined with Carrier-Sense Multiple Access (CSMA) and TDMA protocol. In this, UAVs consist of half-duplex radio and omnidirectional antenna, which allows the UAVs to rapid access of network and location estimation to reduce the collision probability. This protocol helps in eliminating the hidden terminal problem without the use of RTS/ CTS packets.
The discussion here on Data Link Layer (DLL) suggests that the MAC protocol must be designed to produce high throughput and low power consumption for Multi-UAVsystem. In addition, due to the movement of UAVs, there is a short period of time during which data transfer must take place among UAVs. Therefore, when designing the MAC protocol for FANETs, changes in link quality and failures must be taken into account. The highly dynamic nature of UAVs in FANETs results in sudden changes in network topology and also makes inter-UAV routing a challenging task. To resovle this challenge, various Protocols has been introduced at the third layer i.e Routing Layer of FANET Protocol Stack by the researchers. And the brief review of all these protocols has given in Sect. 4.3.
4.3 Routing Layer
FANET’s routing layer is responsible for discovering neighbours, routing packets, and connecting networks. The tremendously changing nature of UAVs generates sudden changes in the network architecture and make routing between the UAVs complicated [71]. Different challenges such as: high mobility, sparse deployment,frequent topology changes or Energy Consumption have occured while designing the routing protocols for UAVs. To address all these challenges, researchers propose different Routing Schemes for the FANET system [72].
Earlier efforts in designing of networking protocols encircled around MANET and VANET architecture [73]. Additionally, a number of routing protocols, including the flooding, dynamic source routing, and pre-computed routing are applied in wireless and ad hoc networks. However, due to the features of UAVs, such as speed and fast changes in node-to-node connectivity, these protocols must be updated and adapted to address these network concerns [74]. Routing Protocols for the Multi-UAV or FANET system that are found in the literature can be categorize into Network topology, Bio-Inspired, Position and Hierarchical based routing protocols. The complete categorization of the FANET routing protocols are represented in Fig. 4. And the brief review of all the protocols which are mentioned in Figure 4 has given in Sects. 4.3.1, 4.3.2, 4.3.3 and 4.3.4 respectively.
4.3.1 Network Topology Based Protocols
In the Network Topology based Protocols, all the communication between UAVs has been done by using IP addresses of mobile nodes or UAVs. However, in [35] the Network Topology Based Routing Protocols have been discussed by the researchers. As mentioned in Fig. 4, this category is classified in the following three categories: (i) Proactive, (ii) Reactive, (iii) Hybrid. And the overview of all these protcols have been discussed in the following subsections.
-
(A)
Proactive Routing Protocols
This section gives the review of Proactive Routing Protocols. As illustrated in Fig. 4, the Proactive Routing Protcols include: “Destination- Sequenced Distance Vector” (DSDV) [75], “Optimized Link State Routing” (OLSR) [76], “Directional Optimized Link State Routing Protocol” (D-OLSR) [77],”Mobile and Load-aware Optimized Connection State Routing Protocol” (ML-OLSR) [78] or “Cartography Enhanced Optimized Link State Routing Protocol” (CE-OLSR) [79] and the brief overview of these protocols has been discussed below.
Destination-Sequenced Distance Vector (DSDV) [75] is the proactive routing protocol contains a routing table for each node that is refreshed periodically. Each node within this routing protocol category stores multiple tables that indicate the full topology of the FANET system. The key advantages of DSDV are its flexibility and the use of sequence numbers, which ensures that data is transmitted without loops. However, it increases the overhead costs as a result of maintaining up-to-date data. And also network performance may be impacted when control messages have been sent out inappropriately even when no data traffic is available. Therefore, the simulation or the experiment analysis which are conducted by the various reasearchers [80,81,82,83] signifies that DSDV routing protocols are ineffective in extremely competitive mobile and wide UAV networks. Also, as the network topology changes or a link fails, this protocol respond slowly.
OLSR [76] is the proactive routing protocols in which the routes are constantly saved and maintained in the tables. As a result, if a path is needed, the protocol establishes the path immediately to every potential destinations, without any kind of initial delay. OLSR uses a specific packet, which involves many messages, to maintain a network communication between the UAVs. Three different types of messages can be carried in OLSR packets, each with its own purpose: HELLO message, which is sent on a regular basis to determine neighbour connectivity, connection sensing, and the MPR (Multipoint Relay) signal; Multiple Interface Declaration (MID) message, that accomplishes the network and systems declaration on a node, and Topology Control (TC) message, that advertises to establish connection information. Therefore, different academicians have done various experiments and simulation for devloping a FANET system by using OLSR Routing Protcol [80, 81, 84, 85]. The results outlines that use of OLSR for different FANET scenarios leads to generate the high network overhead due to it’s periodic flooding behavior.
To determine a complete knowledge about the network communication between drones, OLSR uses a Link State Routing strategy, D-OLSR [77] is a more advanced form of OLSR that employs directional antennas on aircraft so as to increase the data rate. The ML-OLSR [78] has been addressed to avoid high-speed UAVs from being selected as MPRs. CE-OLSR [79] is a more enhanced form of the OLSR protocol [76] that accommodates for high mobility in extremely complex networks such as FANETs.
-
(B)
Reactive Routing Protocols
The Reactive Routing Protocol (RRP) is classified as an on-demand routing method as it discovers and maintains network path on request. If there is data to send, the routing table is modified on a continuous basis. There is no need to calculate a path between the two nodes because they do not have any connection. As a result, these routing protocols only keep the paths that are currently being used. As a result, it solves the overhead issue of the Proactive Routing Protocol. There are two types of messages developed in this routing model: (1) Route Request and (ii) Route Reply messages. A Route Request message is sent from the source UAV to all of its neighbours in order to find the path. So, this can be achieved by using a flooding method. On the other hand, the Route Reply message, has been initiated by the destination UAV and message is sent to the source UAV by the means of unicast communication. By using this routing method, it is not needed to update all tables in the network. As there are no intermittent changes, these kind of protocols save bandwidth. RRP’s drawback is that it takes substantial amount of time to locate a path. As a consequence, network congestion could be higher during the optimum route seeking phase.
The brief overview of Reactive Routing Protocols has been discussed in this section. The Reactive Routing Protcols include: Dynamic Source Routing (DSR) [86], Ad Hoc On-Demand Distance Vector (AODV) [87], Time Slotted AODV [88], Multicast Ad hoc On-demand Distance Vector (M-AODV) [89] and are illustrated in Fig. 4.
DSR [86] allows a network to self-configure, self-organize, and function without requiring any infrastructure. It is primarily used for wireless sensor networks consist of several hops and is used for its reactive structure. In DSR, when a source has data to deliver, it just attempts to find a way to a destination. Due to the high versatility of UAVs, proactive approaches for upgrading the routing table really isn’t suitable. On the other hand, repetitive route searching using a reactive strategy before each packet distribution can be challenging.
An improved variant of both the DSDV and DSR routing protocols is AODV [87]. It inherits DSDV’s intermittent updates and DSR’s hop-to-hop routing. Because of its reactive behavior, AODV only finds a path when needed and do not save all those path to the destinations that are not currently communicating. This routing method is divided into three stages: (i) Path discovery, (ii) packet transmission, and (iii) route management. When a source UAV wants to send a packet, it first performs a path discovery process to determine the intended UAV’s geolocation, and then forwards the packet along a predetermined route to avoid a loop during the packet transmission step. The route management process is used to repair broken links. However, in literature [80, 81, 83, 84] it is found that the various researchers have developed or simulated the Multi-UAV system by using AODV Protocol. And the results outlines that due to the extreme flexible or mobile aspect of UAVs, network interference is a problem with AODV for FANET scenarios.
A time-slotted on-demand routing mechanism is also introduced for FANETs [88]. This is a time-slotted version of Ad-hoc On-Demand Distance Vector Routing (AODV). It utilizes a random-access mode to send its control packets, while this methodology uses the dedicated time slots in which only one UAV can send the packets of data. This routing approach not only improves the throughput, but also reduces the network collisions and improves ratio of packet transmission.
M-AODV (Multicast Ad hoc On-demand Distance Vector) [89] is an improvised version of AODV [87] that employs the multipath routing technique to connect a group of nodes. This protocol can be directly introduced to FANETs by developing multiple tree using a reactive mechanism (i.e., discovery procedure).
-
(C)
Hybrid Protocols
It takes advantages from proactive and reactive protocols. All these routing protocols will play an increasingly important role in the FANET network communication. In practical application, UAV can choose different technologies according to the requirements of the actual scene, choose high efficient transmission mode according to corresponding communication protocol, establish reliable route, improve transmission efficiency of the network, which makes high quality communication between UAV and other communication facilities possible. Also, these protocols can quickly deal with the change of network topology when used in the FANET [90]. This section gives the review of the Hybrid Routing Protocols. As mentioned in Fig. 4, Hybrid Protocols includes:Zone Routing Protocol(ZRP) [91], Hybrid Wireless Mesh Protocol (HWMP) [92], Sharp Hybrid Adaptive Routing protocol (SHARP) [93] and Temporarily Ordered Routing Algorithm (TORA) [94].
ZRP [91] has been founded on the principle of zones, and it can handle large networks with a variety of mobility patterns. During this whole process, every UAV has its own region, and there might be a chance that the zones of adjacent UAVs would be overlapped. A region’s diameter has been determined by a radius of length R, wherein R is the number of UAVs at the zone’s perimeter. The number of UAVs in the area may be achieved by adjusting the system throughput of the drones. However, routing within a zone is referred to as intra-zone routing. Intra-zone routing uses a “proactive routing” method to preserve the route. If the source and destination UAVs are both in the same zone, the source UAV will start transmitting the data automatically. Otherwise, inter zone routing is used to transfer data packets outside of the zone, and a reactive routing technique is used to maintain and identify the optimum pathways.
HWMP [92] is a dynamic routing system designed for Wireless Mesh Networks and deployed for FANETs. HWMP employs a combination of reactive and proactive techniques to determine the path of routing and generate a tree in advance. The reactive and constructive solutions are built on the AODV protocol as well as a traditional shortest path protocol, both can be used concurrently. A source unmanned aircraft can communicate with a destination drone using the reactive technique. The UAVs uses this technique, either when the topology changes regularly, or when there is no source UAV. Therefore, researchers have simulated or tested the FANET secenarios by using HWMP protocol [81, 95]. The simulation result outlines that the constructive method is an efficient alternative for UAVs when there is no change in the topology of the network (i.e., static).
SHARP [93] offers a trade-off between constructive and reactive routing through dynamically adjusting the number of routing control packets exchanged proactively. The amount of hops or the shortest distance across which packets containing the information can be transmitted, has been used to generate proactive zones that surround a group of UAVs. When the destination UAV is not in the constructive region, the reactive function is used.
TORA [94] is a decentralized hybrid routing technology that’s suitable for FANETs and other extremely sophisticated networks. TORA is only responsible for updating and maintaining the connection links between adjacent UAVs. The basic goal of TORA is to reduce the number of data packets that are being transferred during any change in the topology of the network. It builds and maintains a Directed Acyclic Graph (DAG) that includes various routes among adjacent UAVs. Furthermore, TORA usually prefers the longer routes in order to reduce costs. The simulation analysis for Ad-hoc Network by using TORA protocol concludes that this protocol employs both reactive and constructive processes, depending on the network’s state, and establishes new routes in the event of connection failures [96].

FANET routing protocols
4.3.2 Bio Inspired Based Routing Protocols
The biological behavior of insects, such as bees, ants, and even particle swarms, provides valuable support for various FANET issues, especially when it comes towards maintaining connections between UAVs. For the FANET network, a variety of bio-inspired routing algorithms have been designed to resolve various routing problems [113]. As illustrated in Fig. 4, the protcols include: An “Ant Colony Optimization based Polymorphism-Aware Routing algorithm”(APAR) [112], “Bee colony algorithm for FANET routing” (Bee-Adhoc) [111] and “Position Based Ant Colony Routing Algorithm” (POSANT) [110]. Therefore, this section gives the review of these protocols.
APAR (An ant colony optimization based Polymorphism-Aware Routing algorithm) [112] is a swarm-based routing technology developed exclusively for FANET. The well-known DSR [86] is integrated to the particle swarm optimization technique in APAR. As during discovery phase, the number of pheromones as well as the distance travelled by packets are considered as performance evaluators for networking the route. When determining a route selection or making any decision related to network path the parameters such as congestion (i.e., buffer usage and channel loading) and stability (i.e., mobility and inter-connection) must be considered.
BeeAdhoc [111] is a routing algorithm which relies mostly on working theory of a Bee-Hive, that is established on a simple division of tasks among all the bees (UAVs). There are two different types of bees included in this research: foragers and scouts. Two separate aspects are addressed throughout the Bee Ad Hoc process: (i) reconnaissance or scouts and (ii) resource collecting. In the first aspect, the network floods with both forward as well as backward scouts with the source ID, number of hops, and limited residual energy, results in generating the several pathways between communication nodes. The packets which contains the data or the information are transported from the source to the destination through forager bees in the second aspect. Furthermore, the forager-bees transfer the data packets along the specified networking path (i.e., the shortest path consist of high energy level UAVs).
POSANT (Position Based Ant Colony Routing Algorithm) [110] is a routing protocol premised on the ant colony approach and can be used in FANETs. During the exploration process, POSANT uses geographical locations and positions to allow each UAV to choose the best next hop. Consequently, the number of ant generations (control messages) is reduced while the end-to-end transmission time has decreased. Also, communication can only occur when a trajectory is formed between the drones.
4.3.3 Position Based Routing Protocols
For effective routing, Position-based routing methods have been established, which assume that the location of drones has specified. These protocols claim that the source unmanned aircraft is aware of the physical location of the transmitting UAVs and sends messages to the target UAVs without evaluating it’s path. In general, each aircraft evaluates its own location using a GPS system or some other form of the positioning system. The two different types of position-based routing protocols have influenced the evolution of these protocols: In the first group, the sender of a packet uses a position facility to determine the physical location of the receiver, as well as a forwarding technique to deliver information packets to the targeted UAV. In the second group, each UAV uses the integrated GPS to evaluate its own location. In most instances, the sender uses a geographical positioning service to determine the receiver’s location and communicates without conducting a detection method. Since then, many protocols have been created to prevent disconnections or to re-establish connections between UAVs.
As mentioned in Fig. 4, this category is classified in the following three sub-categories:(i) Reactive, (ii) Greedy, (iii) Predictive Position based Routing Protocols. And the overview of all these protcols have been discussed in the following subsections.
-
(A)
Reactive Position Based Routing Protocol In the Reactive Position Routing, whenever the target location broadcast the request, then it is the responsibility of the senders to establish the entire or proper route pathways for their intended receivers. This whole preocess is totally dependent on a discovery method. And, if the connection gets hampered, then in this situation these type of protocols either recover immediately or select the alternate paths to resend the data. So, in this [114] researchers have proposed the UAV assisted reactive routing protocol. As illustrated in Fig. 4, the reactive protocols include: Reactive-Greedy-Reactive (RGR) [109], Geographic Position Mobility Oriented Routing (GPMOR) [108] or Multipath Doppler Routing (MUDOR) [107] and the brief overview of these protocols has been further discussed in this section. RGR [109] is a FANET-specific routing protocol with two different modes: reactive and geographical. The first mode is dependent on the AODV protocol and can be used when the network seems to have a low number of connection problems. The second mode, GGF (Greedy Geographic Forwarding), is utilized to facilitate the broadcasting the packets containing the information because communication network fluctuates due to either high mobility or a relatively less UAVs are in the network. However, based on the neighbor discovery technique, it is claimed that each drone knows the locations of its neighbor. When AODV fails, the location of the destination has been assumed to be determined so that data packets can be forwarded from the nearest UAV to the destination. Also, the GGF mode is triggered, when a connection between the source and the destination is interrupted. GPMOR [108] has been proposed as a solution for FANETs. The traditional position-based approaches [115] depend entirely on the drones position data. This routing system has been developed to determine if it can deliver efficient and scalable data forwarding in terms of throughput and delay. MUDOR [107] is a DSR-inspired position-based reactive routing protocol specifically developed for FANETs systems. The key criteria for determining any possible networking paths depending upon Doppler exchange of control packets are reliability and termination time. The routing decision encompasses the routes with the longest lifespan along with considering all estimated Doppler values. The relative velocity of any two adjacent Drones has been determined by using Doppler values obtained in the discovery process (i.e., the broadcast of RREQ).
-
(B)
Greedy Position Based Routing Protocols When a UAV Ad-hoc network gets completely interconnected but location of the target is known or determined in advance, then in this case data packets are more frequently forward to UAVs. By making use of a Greedy Forwarding (GF) method. The approach helps in reducing the amount of hops and distance to the destination. Furthermore, the use of GF algorithm in the routing protocols reduces the data transmission time. As we know that, FANET connectivity is inconsistent at all times because of the highly dynamic nature of UAVs, so in that case the Greedy Forwarding approach is inefficient. To make this approach efficient, researchers propose the various Greedy Routing Protocols for FANET system. As illustrated in Fig. 4, the protocols include: Greedy Perimeter Stateless Routing for Wireless Networks (GPSR) [106], Geographic Load Share Routing (GLSR) [105], Mobility Prediction based Geographic Routing (MPGR) [104] or Greedy Distributed Spanning Tree Routing (GDSTR) [103]. And this section gives the brief review of these protocols. GPSR [106] is a position based Routing protocol that is stateless. Here, Greedy and Perimeter Forwarding are the two stages of this greedy routing technology. The location of the destination node is expected to be determined in the first stage to function properly, and the node closest to the target is selected as the network packet’s subsequent hop. The greedy forwarding mode might collapse at any time given to the network’s adaptability if the chosen next hop is the one closest to the destination and that there are no nodes in the zone. In this circumstance, the second stage will begin regulating and forwarding packets according to the right-hand rule until the network has been gradually joined and the greedy phase has returned. In such a fully deployed FANET, the GPSR protocol has been implemented [116]. GLSR [105] is an enhanced form of GPSR routing protocol [106]. GLSR needs to take advantage of all feasible routing channels between communicating drones in order to adapt to FANETs. The data packets are sent to the drones, allowing it to move towards the destination. In order to do this, a geographical advance measure is calculated for each UAV neighbour, which makes it possible to calculate the optimal routes to the destination. Furthermore, each UAV has a buffer for sending the data packets, and the quantity of loading and sending the information is taken into consideration while selecting the perfect path [117]. MPGR [104] is a greedy forwarding-based FANET positional routing protocol. It is a mobility prediction system based on the Gaussian distribution function that relies on GPSR. This can save costs by assisting in the selecting the most relevant next hop, resulting in more reliable communication path between UAVs. By broadcasting a Neighbour Discovery (ND) packet, MPGR implements another position-sharing methodology. The delivery mode and the destination location are both contained in each ND packet. Each neighbouring UAV responds with its adjacent neighbour list, allowing the UAV sender to form its own table of neighbours. Also, to make this protocol more effective for different UAV scenarios, researchers make use Adaptive Beacon scheme. This scheme estimates the position of the adjacent drones based on mobility data of UAVs in order to avoid connection failures between UAVs. In contrast to conventional geographical routing, researchers have proposed GDSTR protocol for 3D networks [103]. GDSTR is a greedy routing protocol that uses a tree like alternate routing topology. GDSTR protocol also collects the geographical coordinates of UAVs utilizing two dimensional convex hulls and applies two-hop neighbour information during the greedy expedition to optimize the shortest path. Each drone maintains a record of zones that is covered by the sub-tree under each of its neighbouring tree in order to choose the most appropriate route for movement toward the target. Whenever a UAV root seeks to communicate with UAV, it forwards the data packet through the tree till it reaches the networking subtree. A subtree’s transited UAV is generally known as anchor node. When the packet reaches the root, it get destroyed because the root is present in every sub-tree (that is, optimum local). To overcome this issue, the various 3D Geographic Routing Protocols have been proposed by researchers and the review of different protocols have discussed in [118]. Also, in this protocol,the data packet is transferred to UAV using the right-hand rule.
-
(C)
Predictive Position Based Routing Protocol The connectivity between the drones is inconsistent and often deteriorates because of the highly diverse versatility of UAVs. There are several approaches that can be extracted from the predetermined actions of UAVs to establish network algorithms that resolve this issue. Additionally, these protocols can be used to estimate how long wireless connections between UAVs could last. Furthermore, the transmission of data often necessitates an entire routing path to the destination, which appears to be a difficult strategy to implement because connection termination must constantly be calculated. Furthermore, there is a high uncertainty, especially when FANETs use a 3D architecture, that raises additional challenges. This motivate researchers to propose the the Predictive Position Based Routing Protocols. As mentioned in Figure 4, these protocols include: Geographic Routing protocol for Aircraft Ad hoc Network (GRAA) [102], Predictive-Optimized Link State Routing Protocol (P-OLSR) [101] or Adaptive Beacon Position Prediction(ABPP) [100]. And the description of these protocols has been discussed below. GRAA [102] is location-based routing technique that allows for UAV mobility predictions when transferring data.GRAA has been established on GPSR [106], under which the UAV considers various parameters such as location and speed of all neighbors, including the destination node, before transmitting data. To prevent packet failure, all the subsequent hops to the destination is determined. P-OLSR (Predictive-Optimized Link State Routing Protocol) [101] is FANET-specific routing version of the OLSR protocol. As the term indicates, it uses the locations of aircraft to determine the resiliency of the connections among drones and choose the one with the least amount of packet loss. It can be achieved by exchanging the messages that contain not only path state information, but also relevant data about UAV mobility (i.e. positions, location and velocities). This enables the measurement of a metric known as Expected Transmission Count (ETX) to specify, how long the drone stays in range and how successfully the connections grow. This results in minimizing the amount of inconsistent connections. ABPP [100] is a prediction-based routing technology designed specifically for FANET. The weighted linear regression model is used by ABPP to leverage UAV location. ABPP also comprises a fuzzy controller for adaptively adjusting the frequency of beacon broadcast, with the estimated error degree and beacon interval as input and output, respectively. ABPP uses a GPSR-based spatial routing protocol that captures the time and location of adjacent drones.
4.3.4 Hierarchical Based Routing Protocol
In general, the hierarchical routing protocol is dependent on the creation of clusters, each of which is supervised by a cluster head (CH). This is beneficial in terms of decrease in the number of packets which are transmitted to ground stations and also minimize the energy consumption among drones. As a drawback, cluster formation is extremely challenging when it comes to hierarchical protocols, and in the most of the cases, they do not accept disconnections between node frequently. In this section, cluster-based routing protocols for UAV networks are reviewed with regard to their key features, distinguishing characteristics, and potential advantages. Therefore, researchers has introduced different hierarchical based routing protocols as mentioned in Fig. 4. These protcols include: UAV Routing Protocol (URP) [99], Efficient Routing Strategy for UAVs(ERSUAV) [98] or Intelligent Multi-Hop Routing protocol based on Localisation (IMRL) [97]. This section gives the brief review of these protocols. Also, Hierarchical Routing Protocols also dependent on clustering algorithms. The details of the clustering protocols is discussed in the next section.
URP [99]is a dynamic cluster-based routing system with the goal of gathering information from a particular location. And for selecting the Cluster Head, researchers have used Naive Based classifier [119]. In this, a UAV-based mobile sink node collects data from scattered nodes based on a random walk or predefined path. A UAV sends a beacon message to activate all sensor nodes residing in its neighbours, and it makes a cluster by considering path and data type. The advantage of URP is that it can be effectively used in a deployed UAV network without any existing infrastructure.
ERSUAV [98] is a hierarchical routing algorithm that helps to develop an effective routing strategy for UAVs. This protocol combine the advantages of WSN as well as drone in order to make efficient use of clustering on the same framework as introduced by researchers in [120]. Its primary purpose is to reduce delay and conserve energy. The distance between the nodes affects the latency and power usage.
Intelligent Multi-Hop Routing protocol based on Localisation (IMRL)[97] is a fuzzy-based cluster routing technique that outperforms previous systems in terms of energy efficiency, localization accuracy, and data transfer. IMRL routing uses a weighted centroid localization procedure, wherein the positions of the UAV nodes are selected using a fuzzy logic inference based on the collected signal intensity indication values. When GPS signals are extremely inadequate because of multipath fading and jamming, IMRL routing can be employed efficiently.
From the literature, it is observed that the routing protcols can be optimized in designing or simulating the Multi-UAV system for different disaster applications. But to tranfer the data without any loss and handle the congestion there is a need to develop protocols at fourth layer i.e Transport Layer of FANET Protocol Stack. Therefore, Sect. 4.4 discusses the transport layer challenges and protocols that has been designed by researchers.
4.4 Transport Layer
The consistency in the FANET designs is intimately connected to the stability in the communication architecture, and establishing a reliable transport mechanism is necessary, especially in a highly complex environment [121]. A FANET transport protocol is expected to have the following important features:
-
1.
Reliability: The significant role of transport layer protocols in communication networks is reliability. To achieve optimal functionality, messages must be transmitted effectively to a target node. For different FANET applications, the protocol should provide various consistency levels.
-
2.
Congestion control: The typical consequences of a congested network are the decrease in packet delivery ratio and the increase in latency. If a FANET is congested, collaboration and collision avoidance between UAVs cannot be performed properly. A congestion control mechanism is necessary to achieve an efficient and reliable FANET design.
-
3.
Flow control: Because of a fast sender or multiple senders, the receiver may be overloaded. Flow control can be a serious problem especially for heterogeneous multi-UAV systems.
FANET systems are first deployed using existing transport protocols. A multi-UAV systems incorporating FANET communication architecture is presented by researchers. The system is IP-based, and the transport layer supports both TCP and UDP transport protocols [122]. On the other hand, TCP is not suitable for use in designing the FANET network [123]. The framework mechanism supports TCP flow control, and its window size fluctuates continuously. However, it is difficult to calculate with precision the duration of the round trip. To address these issues, the researchers came up with a various protocol for the transport layer. As illustrated in Figure 5, the protocols include: Joint Architecture for Unmanned Systems(JAUS) [124], Predictably Reliable Real Time Transport (PRRT) [125], Low- Latency Reliable Transmission (LRT) [126] or MultiPath Transmission Control Protocol (MPTCP) [127]. This section provides an overview of these protocols which has been established specifically for the FANET network system.

Taxonomy of transport layer protocol
JAUS [124] is a new standard for communication between UASs. Since JAUS was originally designed for ground systems or stations [128]. It has now been extended to include all types of unmanned vehicles (Aerial, ground, surface-of-water, and underwater vehicles). Also, it can include efficient transport protocols, each with their own set of packet structures and semantics. In this JTCP/JUDP is implemented besides the TCP/UDP like a wrapper. Additionally, JAUS recommends the J Serial protocol for transparent data transports, that includes the data sets of variable-length and size, in case of low-bandwidth serial links are used.
PRRT Protocol [125] is an open transport protocol that provides a latency-aware, partially reliable datagram delivery service. This protocol is based on the two different modes. First, PRRT employs cross-layer pacing to achieve predictably low end-to-end delay by keeping buffers empty. Second, Adaptive Hybrid Automatic Repeat request (AHARQ) is used to adapt the redundancy to the current channel characteristics and application requirements. Finally, PRRT consists of send and receive methods which are specifically used in the control applications, as they allow to delay the sending of the data for a particular time duration that is appropriate for the current bottleneck of the system. Also, it controls the treatment of packet expiry dates based upon reception.
LRT [126] is a UDP-based application-level reliable transport protocol for latency-sensitive applications over various networks. It is an online network coding based Low-latency Reliable Transmission (LRT) protocol that facilitates network-connected UAV applications. This protocol can be divided into four sublayers based on the flow of the data. First layer is responsible for providing a user interface for the data transmission. Then a second layer is known as division and reconstruct layer and takes the responsibility of transforming messages into equal-sized symbols and the reverse operation. At the third layer, all the coder instances are placed in the queues for the convenience of scheduling.Finally, the bottom layer consists of a packet module and acknowledge module which deals with the actual transmission using UDP. It provides low latency transmission service comparable to that of UDP while guaranteeing reliability as data transmission like TCP. This protocol ensures the flight safety in-terms of the transmission of UAV commands and mission related data.
MPTCP [127] is a protocol that aims to build a group of cooperating UAVs that communicate with each other using multiple network interfaces, as they fly. To achieve optimal transmission in the UAV network, researchers propose a novel mathematical model that establishes a relationship between multiple interfaces and transmission types. In this protocol, transmission types are modelled as services and interfaces as resources. And the relationships between services and resources are assigned fitness scores. The protocol ensures an autonomous and self-organizing communication system between UAVs. Researchers have showcased the implementation of MPTCP protocol for designing the UAV surveillance system [129].
There are various transport layer protocols that has been discussed in Sect. 4.4. The researchers are making using use of these protocols in developing the multi-UAV system so that the data is not lost during transmission. And also, the reliability of the system could be maintained. But the integrity of the data is still a challenge in these protocols. This motivate researchers to introduce protocols at fifth layer i.e Application Layer of Protocol Stack of FANETs. Therefore, Sect. 4.5 discuss all the functionlaties and the framework which are introduced by researchers and are essential in designing the FANET system.
4.5 Application Layer
The application layer can make use of the data received by forwarding devices.It can help improve the network’s communication links, raise the network’s resistance to cyber and physical security threats, and control data transfer in the network. This is accomplished by utilising the underlying layers to create a controllable drone network [130]. The UAV-network system can significantly enhance the network coverage, robustness, and reliability. This is incredibly useful for increasing drone deployment efficiency, especially for surveillance and rescue applications. Additionally, in applications where swarm UAV/drones or resources are required, the application layer allows multiple elements to be incorporated without disrupting the layer [131]. Drones are vulnerable to security concerns such as drone data manipulation or communication link interruption between drones in some cases. In this way, the application layer contributes to the network’s security against potential threats. In the field of data management, the various functionalities of application layer are also visible. Furthermore, data routing can be regulated by the application layer to ensure that the necessary data packets are delivered to the appropriate entities while maintaining strong data packet accuracy [132]. But before developing UAVs framework some considerations should be taken into account or the challenges/ functionalities occur at the application layer are as follows:
-
1.
Real-time management: UAV task allocation, mission management, and flight control algorithms should be provided for real-time execution and path planning which requires reliable communications.
-
2.
Reliable Connection: These devices require continuous connectivity between UAVs-GS, UAVs-UAVs so that they can access all the information when required. The assumption of a reliable connection is valid for all the operations in different emergency, military as well as civilian application scenarios, where networks are available for Wifi/Zigbee/LTE connections.
-
3.
Context perspectives: The availability of some services depends on some contexts such as the device’s location, energy level, or specific sensor readings.
Secton 4 has discussed all the FANET Protocol stak layer Protocols which has been proposed for designing or developing the multi-UAV system for different FANET scenarios. Along with these protocols, other algorithms such as Time Synchronization, Localization has been introduced to build an autonomous behaviour of Swarm-UAVs network system. Additionally, clustering algorithms is also used by the researchers. Therefore, the details of the all these protocols have been discussed in Sects. 5, 6 and 7 respectively.
5 Clustering Protocols for FANET System
When a FANET is highly porous, it is preferable to group the whole network structure into zones or clusters, each of which is managed by a cluster-head (CH). When one UAV attempts communicate with another UAV, the transmission can be done through their respective CHs. Clustering is an effective technique for networking and managing the large scale ad-hoc network. Clustering provides many benefits such as scalability, reliability, fault tolerance, data aggregation, energy efficiency, coverage, connectivity, and reduced delay [133]. The cluster-based protocols will be used more popularly in the future as the number of UAVs is increased in UAV networks. This section deals with the clustering protocols which are used in the different FANET or UAV based applications. As mentioned in Fig. 6, the Clustering Protocols are divided into two categories: (i) Deterministic and (ii) Probabilistic Clustering protocols. The review of these protocols has been given in Sects. 5.1 and 5.2 respectively.
5.1 Deterministic Clustering Protocols
In deterministic clustering algorithm, reliable parameters are used to choose or select a CH. The most commonly used parameters are residual energy, centrality, proximity and degree of the node. By hearing and exchanging messages, the nodes get information from the adjacent nodes. Therefore, the researchers propose the various deterministic clustering protocols for FANET system as mentioned in Figure 6. These protocols include: Coverage Efficient Clustering Algorithm (CECA) [134], Mobility Control based Clustering (MOOC)[135], Mobility Prediction Clustering Algorithm (MPCA) [136], Density-Based Spatial Clustering of Application with Noise (DBSCAN) [137] or Clustering Algorithm (CA) [138]. The review of these protocols has been discussed below.
As we know, the most important and challenging task for the UAVs is area coverage, which requires the UAV to explore the whole region in order to collect the information. To overcome this challenge, CECA [134] has been proposed by researchers for FANETs by jointly optimizing the clustering, positions, and transmit powers, to maximize the coverage efficiency under the delay and power constraints. In CECA, all UAVs exchange the data with a leader UAV-enabled Mobile Edge Computing (MEC) server under some delay constraints. In case of swarm-UAVs based system, this protocol first determines CH for each zone that consist of UAVs, and then chooses the cluster members (CMs) according to the minimum delay with the CH. The placements/positions of UAVs must be optimized in order to meet the delay restrictions and improve coverage efficiency. Also, a coverage performance statistic, which is defined as the ratio of the area of the covered region of N UAVs to N times the area of the covered region of a single UAV, is also used to assess and estimate the UAV network range efficiency. Basically, a coverage-efficient clustering algorithm (CECA) has been proposed by researchers. And it is based on the block-coordinate descent method to solve the joint communication and formation planning problem. Specifically, the clustering, relative positions, and transmit powers were jointly optimized to maximize the coverage efficiency under the delay constraints.
In designing the FANETs network system, there is a conflict between area coverage and network connectivity which is required for clustering and data transmission among UAVs.

Taxonomy of FANET clustering protocol
To resolve this conflict, researchers has proposed MOOC [135] protocol for area coverage in FANETs. It is a virtual force-based mobility control protocol that is designed to improve the coverage efficiency and maintain network connections. Also, network connectivity between UAVs in MOOC protocol can be ensured by cascading leader-follower connection approach. MOOC is the first protocol which utilizes mobility control to improve clustering performance so as to maximize the area coverage in FANETs. In MOOC, three different mobility control schemes are put forward for orphan nodes, CMs and cluster heads, respectively. Also, a mobility control strategy is designed for different types of nodes based on virtual forces, considering both reducing overlapped coverage and maintaining connections to improve clustering performances.
MPCA [136] is a hierarchical routing technique that attempts to create clusters based on UAV movement prediction. Two parameters are used to estimate mobility: (i) link expiration time and (ii) dictionary tried structure. Each pair of UAVs’ locations and speeds are used to determine the first parameter. Whereas, the possibility of a UAV remaining in the cluster is determined by the second parameter. As a result, these two characteristics are critical for forming more stable clusters and improving network performance. Hence, clusters can be simply formed based on the speeds, locations, and positions of UAVs. Depending on the type of UAV, communication is accomplished by inter-cluster and intra-cluster techniques (i.e. when UAVs are belonging to the cluster or not).
DBSCAN [137]is an embedded distribution clustering algorithm for UAV networks. DBSCAN estimates the geolocation of moving devices through Extended Kalman Filters (EKFs). DBSCAN’s purpose is to provide an ideal sensor manager and path planner for tracking many mobile agents. The UAV selects the cluster and obtains the CM’s position and velocity via DBSCAN routing. Once the UAV has chosen a cluster, it employs the best sensor manager and path planner to get the cluster’s geo-located targets [142].
CA [138] is a routing protocol based on the formation of dynamical clusters depending on the mission adopted in FANET. CA develops ground clusters that are associated with mission data.Each cluster is represented by a Cluster Head (CH) that the ground station selects based on its geographic position. In turn, the CH exchanges data with the UAVs.
5.2 Probabilistic Clustering Protocol
The fundamental objective of cluster-based probabilistic algorithm is to expand network endurance. Here, the CH is randomly selected across multiple probabilistic clustering algorithms. The Figure 6 outlines a number of probabilistic cluster routing protocols for the FANET network system. These protocols include: Multi-cluster Swarm Control Scheme(MSCS) [141], Mobility and Location-Aware Stable clustering algorithm (MLSC) [140], Multi-Cluster communication protocol for FANETs [49] or Energy Aware Link based Clustering (EALC) [139]. And the overview of these protocols has been discussed below.
Researchers has introduced MSCS [141] for UAVs network system. It is a new cooperative and adaptive algorithm for multi-clustered, integrated UAV swarms. By Using an adaptive multi-clustered leader-follower strategy, this scheme allows multiple UAVs in a swarm formation to organise their navigation and route planning operations. The swarm members follow a dynamically elected leader based on the UAV with the best fit to lead the swarm towards the destination. The coordination of the UAVs is achieved through SBP (Swarm Broadcast Protocol), a single-hop broadcast UAV-to-UAV (U2U) communication protocol, which allows swarm members to exchange information about their current location and their local cluster leader. The advantage of the algorithm is that all the UAVs cooperate and communicate with each other in order to plan and coordinate their movement in diversified environments that can contain various ground and aerial obstacles.
MLSC [140] has introduced by researchers to enhance the stability and accuracy of the network by reducing unnecessary overheads and network latency through incorporating several design factors with minimum resource constraints. In MLSC, initially, the number of UAVs are organized into clusters. Within the cluster, data is collected at the CH, and forwarded to the base station/ground station. And then the optimal deployment of the UAVs is done in such a way that they cover the maximum area while using a minimum transmit power. For the geographical area, the number of CH UAVs are equipped with a single antenna. This is done so as to maximize the coverage performance by ensuring that the coverage fields of UAVs do not overlap. Furthermore, in order to find the optimal cluster size and to minimize the network overhead, the relationship between the maximum coverage probability of CH and cluster size is estimated. The MLSC protocol maintains link stability so that both the packet loss rate as well as the network latency can be reduced.
Multi-Cluster communication protocol for FANETs [49] is that FANET network system which necessitates an adaptive, reliable, delay-bounded, and scalable communication network among UAVs for the effective data transmission and communication. Maintaining the required level of Quality of Service (QoS) becomes a challenging task due to communication protocol complexity, rigidity, cost of commercial-off-the-shelf (COTS) components, restricted radio bandwidth, high mobility, and computational resources.
To overcome this challenge, an efficient Multi-Cluster Communication as well as network management protocol for FANETs has been proposed by researchers [143]. Basically, it uses a less complex, low cost IEEE 802.15.4 MAC protocol for inter-cluster and intra cluster communication among UAVs. This protocol deals with the two types of modes (i) Beacon enabled mode and (ii) beaconless mode. Both these modes have been considered with Guaranteed Time Slots (GTS) and virtual Time Division Multiple Access (TDMA) respectively. The advantages of this protocol is that it reduces the communication cost, optimizes the performance of the network, eliminates the collisions and medium access delays.
EALC [139] has been proposed to address two significant issues in UAV routing: short flight durations and ineffective routing. To resolve both problems, the authors used K-means density clustering. An optimum cluster extends the life of the cluster and lowers routing cost. EALC employs a variation of the K-means density method in the selection of CHs. In the traditional K-means density approach, the degree of neighbourhood is represented by a single parameter,but,for the selection of an appropriate CH, EALC considers two parameters: energy level and distance to neighbours. EALC aims at improving the life of the cluster, improving energy consumption and saving the energy of the node by efficiently selecting the transmission power of the nodes. For enhancing the lifetime and energy consumption of a cluster, EALC integrates a two bio-inspired algorithms namely: Ant Colony Optimization (ACO) and Wolf optimization-based clustering techniques.
In EALC, nodes are grouped into clusters using a K-means shortcircuited fitness algorithm and communicate via CH. UAV nodes communicate the energy level and position of CHs on a regular basis. By limiting the transmission range and efficiently consolidating the grid, EALC simplifies trajectory calculations and reduces drone energy.
6 Time Synchronization
One of the most fundamental services required in wireless sensor networks is time synchronisation [144]. It can meet coordination and data reliability needs with precision. GPS-based time synchronisation is a widely used, high-accuracy time synchronisation method. However, the node’s energy consumption and the solution’s deployment cost are both significant [145]. Therefore, this section deals with the various time synchronization protocols [146] which are developed by researchers for FANETs.
The IEEE 1588 standard proposes and defines the Precision Time Protocol (PTP) [147, 148] which is a time synchronisation protocol. It follows a client-server architecture which is implemented at the application layer level and is highly accurate. Reference Broadcast Synchronization (RBS) [149] is a low-precision time synchronisation mechanism used in single-hop networks.
Researchers has introduced Time synchronization Protocol for Sensor Networks (TPSN) [150] for Ad-hoc networks. It is a time synchronization protocol for mono-hop and multi-hop networks that is implemented in the Media Access Control (MAC) layer. Flooding time synchronization protocol (FTSP) [151, 152]is the most common time synchronization technique used in wireless sensor networks for multi-node communication.
However, the challenges associated with these time synchronization protocols are energy consumption and the time synchronization errors (i.e. accuracy) [153]. This section gives the overview of the various time synchronization protocols that has been developed by the researchers for UAV networks.
Clock synchronization for swarm UAV [154] is a key technology of the swarm UAV ad hoc network. The idea behind this protocol is that the whole network is divided into a series of small networks. Basically, in order to form MFSP (Mean field based Clock-Synchronization Protocol) two algorithms are used. First, the time-delay estimation algorithm which is based on gray prediction. And second, an energy-minimized clock synchronization algorithm is used based on average field theory. Also, it first uses a kalman filter to accurately estimate the clock deviation from neighbouring nodes, and then uses the average field theory to synchronize distributed networks. Once synchronization is done, the energy of the small network nodes or the entire network can be minimized. This whole process is known as network-wide synchronization. The advantage of the protocol is that it increases the synchronization speed, and reduces the network overhead. It provides the basic service for different FANET applications such as information exchange, collaborative transmission, data fusion, and energy management among swarm UAV.
High Precision Time Synchronization Protocol of UAVs [155] is a protocol which is based on the short wave side tone ranging signal for the formation of UAV networks. It is a method which directly measures the transmission delay by using the phase relationship of multi-side signal carrier and the frequency of side tone signal. This protocol is designed to realize the unidirectional correction of the signal transmission delay. This protocol improves the synchronization accuracies between UAVs. Also, the algorithm has high robustness and survivability. It also contributes to the surveillance and monitoring of UAVs.
Generally, for the formation of the FANET network system, traditional centralized time synchronization approach is applied in large-scale distributed UAV networks. But the challenge associated in that approach is error accumulation and the complex changes in the network topology.To overcome this challenge, researchers propose a distributed time synchronization method for the formation of UAV networks [156]. This results in taking the Ultra Wide-Band (UWB) signals as an information carrier. Here in this approach, UWB communication systems are used in the formation of the UAV network. Here in this, each UAV sends its current time information, to its corresponding neighbor nodes. After receiving the information, they do a simple arithmetic average and put the average value as the clock tick for the next time then broadcast the information again. This process is repeated several times, till an identical clock reaches on average, that results in an implementation of the distributed time synchronous for the whole formation of the FANET network system. The protocol helps in minimizing the transmission delay.
UAV assisted low energy consumption time synchronization Protocol [157] is an algorithm especially designed for the large scale WSN and is based on cross communication technology. This technique sends time synchronization data packets for calibration using a UAV.Additionally, Configurable Topology Control (CTC) is used to provide UAV data transmission coverage and a high success rate. A UAV can send a high-power temporal sync packet to low-power sensors without using relays. This algorithm can achieve accurate time synchronization with almost zero energy consumption for the sensor nodes. It is a CTC-based method of sending time synchronisation data packets. It broadcasts time synchronization data packets using a commercial high-power Wi-Fi equipment to ensure that the UAV can accomplish time synchronization globally and efficiently.
7 Localization
Localization in the FANET is required in trajectory or path planning [158]. Various localization methods such as global positioning system, tag and proximity-based localization exist in the FANET network system [159]. But, due to the high speed and various mobility models of multi-UAV systems, FANET needs very precise location data with shorter time intervals. Therefore, a lot of work has been carried out for localization of devices in order to increase the accuracy and also to locate all the nodes/UAVs in the network system [160, 161]. This section provides a summary of the localization protocols developed by the researchers for multi-UAV network system.
UAV-assisted Wireless localization [162] is a localization and a path planning approach that is specifically used in the FANET network system. In this approach, the UAVs can extract one-hop neighbor information from the devices that may have run out of power by using directed Wireless Power Transfer (WPT). Basically, it autonomously localizes all wireless nodes, which are reachable through a single starting node in a network. By using the K-means Clustering algorithm in UAV-assisted localization not only helps in optimizing the trajectory of the UAV but also to minimize energy spent during WPT. Furthermore, localization by clustering the probabilistic region can reduce the average energy spent by half approximately.
UAV-assisted ground user localization [163] is a localization solution for FANET network systems. It is a protocol which consists of a mixture of Line of Sight (LoS) and non-LoS (NLoS) based signal power and implemented by using Least Square (LS) algorithm. This model has an ability to ensure localization in a variety of different FANET scenarios such as natural disaster, traffic congestion and so on. This protocol can provide high reliable wireless communications for ground devices as well as enhance the capacity and the coverage of wireless sensor ad-hoc networks. Also, the UAVs with their adaptive altitude, can enable LoS transmission links for ground devices more probably.
Artificial Bee Colony (ABC) Localization Algorithm[164] has developed to locate the position of UAVs efficiently by considering a circle packing method so as to maximize the coverage and minimize the transmission power in UAVs. Here, in this algorithm, a set of UAVs can be successfully used as wireless base stations or stations for the users inside a building when mobile cellular networks are down. Therefore, the role of a wireless base station is assigned to a UAV and its optimal location is determined by the Artificial Bee Colony (ABC) algorithm.
Swarm Intelligence Localization (SIL) Protocol [165] is the boundary-based optimization protocol that takes the essence of Particle Swarm Optimization (PSO)[166] method to detect the location of the target UAV node. This protocol also follows the grouping method to accomplish fast convergence. In this novel approach, noise parameters are modelled by using a uniformly distributed standard value with respect to distance and the environment. The SIL algorithm is scalable in such a way that with the increased number of target nodes, the number of localized target nodes is also increased.
A Flight Path Planning robust localization system by using multiple UAVs has been proposed by the researchers [167]. In this system, UAVs are classified into two types according to task: a main UAV and subsidiary UAVs. A main UAV performs inspections in the vicinity of the infrastructure facility. Subsidiary UAVs assists position estimation of the main UAV by transmitting their position to the main UAV. This method focuses on utilizing information from external sensors for localization of a UAV with constraints on payload and computing resources. Subsidiary UAVs estimate the main UAV’s position by using two pieces of information: absolute position and relative position between the main UAV and the subsidiary UAVs. Therefore, it is important to plan the position of the subsidiary UAVs according to the inspection path of the main UAV.
Localization and synchronization are fundamental services in a FANET network system since it is required to know the position, the global time of sensor nodes and also to relate a given event detection to a specific location and time. But there are errors associated with the existing localization and synchronization algorithms. So,to overcome the problem of locating and synchronizing the clock of sensor nodes, researchers has developed Joint 3D Localization and Synchronization Algorithm [168] for UAV System. Here, the UAV is outfitted with a GPS receiver and navigates around the sensor field, disseminating its position and clock time, allowing sensor nodes to determine its place, duration, and geolocation. The hybrid solution exhibits three main advantages for the localization and synchronization systems: (i) all network nodes are able to estimate their localization and local time with high accuracy; (ii) this approach is efficient for both sparse and dense networks and (iii) It also reduces cost of the network [169].
Sections 5, 6 and 7 have discussed all the protocols that would help in developing an autonomous multi-UAV system. To design, simulate or to test a FANET system prior to its real time implementation, there are platorms, testbeds and frameworks that has proposed by various researchers. And the brief review of all the simulators and test beds has discussed in Sect. 8.
8 Network Simulators and Test Beds
Researchers and academicians are developing network simulators and testbeds for Flying Ad-hoc system. This method has also stimulated the interest of the industry, with several enterprises emphasizing on the construction of realistic network simulators for testing network designs before implementing it into a real world scenario, and thus reducing costs and risks. A lot of work has been done in this field, with the key motivations as follows: i) the importance of simulators in the implementation of emerging technology, ii) its ability for low-cost training, and iii) its research effectiveness [170]. UAVs may operate as a single searching unit under human control or as part of an aerial swarm capable of forming an aerial network or swarms of UAVs. Connectivity or the communication between swarms of UAVs can be realized by using various different test beds and simulators. FANETs model simulator and testbeds can be classified into two main categories: i) framework that is designed for a single UAV, ii) framework that models the action of a group of UAVs. The key difference between them is that in the later one, each UAVs movements are dependent on the movements of the other UAVs [171]. Sections 8.1 and 8.2 focuses on established FANET test beds and simulations to give a brief insight to FANET researchers. And the description of the testbeds and simulators are given in Table 1.
8.1 Test Beds
At the University of Colorado, one of the first test beds for FANET was implemented [172].It was designed and manufactured with IEEE 802.11b radio equipment installed on small UAVs, as well as a Fidelity-Comtech GPS and bidirectional amplifier with a 1W output. Another multi-UAV testbed that can handle UAV-to-UAV communication is the Berkley Aerobot Team (BEAR) [173]. This research facility consists of a fleet of UAVs from BEAR helicopters, fixed-wing UAVs, unmanned land robots and a mobile land station. It also includes 802.11 wireless network cards in rotorcraft-based unmanned aerial vehicles (RUAVs)[174] that can be used for FANET.
A real-time indoor Autonomous Vehicle test Environment (RAVEN)[175] has been introduced by researchers for testing multi-UAV systems. This test bed uses a motion capture system to enable rapid prototyping of aerobatic flight controllers for helicopters and airplanes. Another indoor testbed which is known as General Robotics, Automation, Sensing, and Perception (GRASP) [176] developed at the University of Pennsylvania.It is established to facilitate research into the coordinated, dynamic flight of tiny UAVs, which might be used for reconnaissance, surveillance, manipulation, and transportation.
Moreover, swarm methodologies have been proposed to control the multi-UAV networks in [177] in a test bed called Sensing Unmanned Autonomous Aerial Vehicles (SUAAVE).The main objective of the test bed is to build and control a UAV swarm through an ad hoc network.It can be used for the creation of innovative UAV swarm communication architectures and protocols.
The research and development in the field of outdoor UAV testbeds are conducted at the Georgia Institute of Technology.The name given to the research project is UAV Research Facility (UAVRF) [178]. The UAVRF operates a variety of multi-UAV systems and conducts flying testing to verify research results. Within UAVRF, the researcher designed a FANET implementation using the IEEE 802.11 communication hardware [179].
8.2 Network Simulators
In [180, 181] researchers have described some of the open source simulators for UAVs. In [182] an open source simulator known as Flight Gear has been developed for simulating real-time 3D UAV models. Flight Gear incorporates and emulates features such as temperature, flight modes, and geographic conditions. This simulator is critical for learning about complex models of flying vehicles as well as checking flight control rules.
Regarding multi-UAV applications, several simulators have been developed in order to test UAVs physical movements, the communications architecture and also new application areas [183, 184].
One of the first simulators for testing multi-UAV communications is Real Time multi-UAV simulator (RMUS) [185]. It emulates direct communication links between UAVs according to IEEE 802.11 standards. Another option for simulating the multi-UAV environment is X-plane flight [186]. It is the simulator which can be used in conjunction with MATLAB for simulating the multi-UAV networks. In this simulator, MATLAB is used to implement various multi-UAV control algorithms, which are then simulated in the flight simulator [187].
Autonomous flight and autopilot features are now implemented simulation. Among open source autopilot simulators, Ardupilot and PX4 are most widely used. Ardupilot [188] has a wider range of supported platforms and hardware, including Pix-hawk, NAVIO and Erle-Brain. Some commercial vehicles, such as the 3DR Solo, have also used Ardupilot. In order to test Ardupilot’s capabilities, several UAV simulators have been built on top of it.
For instance, Gazebo [189] extends the range of simulated devices to include land rovers, planes, and small robots using the Robot Operating System (ROS) [190]. Ardupilot is also used in XPlane-10, Real Flight, and a few other commercial simulators, but they mainly concentrate on motion and navigation.
The most common simulation platform for simulating topology control is Gazebo [189]. It can represent the physical characteristics of a UAV in a practical way. This simulation platform can also be used to build topology control algorithms such as swarm collision avoidance. Gazebo is used to model practical physical parameters of UAVs. However, accurate simulation of network protocols cannot be accomplished using network simulators or robotic simulators alone. So, in order to achieve accurate simulations of FANETs, researchers combined a network simulator with a robot simulator [191].
For testing and simulating the thousands of micro as well as mini swarms, researchers has proposed an open source simulator which is known as Simbeeotic [192]. It is a Micro-Aerial Vehicle Swarm Experiment Simulator and Test Bed. It can simulate the physical movements of the UAV swarm as well as the communication architecture between UAVs. It is also possible to develop algorithms and rapid prototyping with Simbeeotic. It supports both pure simulation and hardware-in-loop experimentation. Simbeeotic can cover a complete view of the UAV swarm system, including actuation, sensing, and communication.
There are other Network Simulators which is important to accurately simulate UAV operations in order to build efficient UAV systems and applications.As a result, various simulators, such as NS-2 [193], NS-3 [194] , QualNet [195], OMNET++ [196], and so on have been developed to simulate and test network protocol operation for FANETs. These simulators are categorised as network simulators because they support node mobility through a pre-defined trace file or Gauss-Markov mobility.
From the discussion of Sect. 8, we can say that alot of research is going on in the field of multi-UAV testbeds or simulators. Moreover, researchers are making use of the mentioned simulators in simulating or testing a FANET system for various application areas such as disaster, agriculature and so on. Section 9 describes the current research, new approach and technology that are developing by the various researchers to enhance the performance or increase the security of FANET system. And, some open issues related to multi-UAV system are also discussed.
9 Current State of Art and Regulations
A swarm of aerial drones is a collection of several drones that works together to accomplish a mission goal in a self-organized and flexible manner. The current UAV swarm framework is designed on complex networks, in which each aircraft is represented as a node and each link indicates sharing of information between drones. Even though previous theoretical research studies have addressed several technical challenges in UAV swarm communication architectures and routing protocols, but still there are many intriguing, essential, and yet complex and open research issues that need to be investigated further. Some of them are briefly summarized as follows:
-
1.
Multilayer infrastructure not only adapt to the peculiarities of UAV swarm communication more effectively, but also introduces new issues. As gateway UAVs plays a vital role in swarm interaction, so the framework must have a capability to identify the gateway UAVs failure. Additionally, if a UAV collapses, then a reliable algorithm must exist for selecting the next UAV to serve as a gateway. Simultaneously, the information saved in the defective gateway UAV should be capable to coordinate with the standby data.
-
2.
The rapid movement characteristics of UAVs and the substantial change in the network architecture can result in an intermittent connection of swarm communication. This has always been a significant issue with routing protocols. As a result, establishing the solution to the issue of inconsistent connectivity will remain at the center of research in the future.
-
3.
At present, the majority of the proposed methodologies are designed to improve performance of the network system. But, on the other hand security is an essential component that could not get neglected in every network communication. As a result, there is a need to introduce new routing techniques, which involves security components.
-
4.
Energy efficiency plays a significant role in UAV systems subject to energy constraints. In some aspects, the challenge of energy savings in UAV systems are somewhat similar to those of wireless sensor systems. Various energy-efficient routing techniques for UAV networks were explored, but the relevance of such protocols in UAV network scenarios has yet to be verified.
9.1 Internet of Flying Things (IoFT)
The Internet of Things (IoT) is a new technology that connects anything, including sensors, actuators, and mobile devices, at any time and from anywhere. The IoT objects can accumulate, integrate, and exchange data among each other through a network infrastructure. These artifacts will be structurally designed and synchronized with one another to support a variety of IoT services. It offers several intelligent computing technologies, such as cloud computing, edge computing, and fog computing, which are generally paired with wireless networks (3G, 4G/LTE, 5G) for faster and more accurate data processing and storage [197].
However, to improve the efficiency and performance in terms of connectivity, coverage, stability and so on, IoT capabilities can be integrated in the UAV itself. That means, the Internet of Flying Things (IoFT) has emerged as a practical solution to solve challenges such as UAV trajectory, routing optimization, resource allocation, secure communication between UAVs etc [198,199,200]. This technology provides many benefits in terms of reliability and robustness, faster computation, data storage and retrieval, security and reducing real time latency. So, IoFT is currently influencing the various application domains, such as smart agriculture, environmental pollution monitoring disaster management, video streaming surveillance, object tracking, smart city, smart industry, etc.
9.2 FANET and Machine Learning
FANETs are one of the most important branches of wireless ad-hoc networks, consisting of multiple UAVs performing assigned tasks and communicating with each other. Nowadays FANETs are being used for different applications such as handling traffic congestion, remote data collection, remote sensing, network relaying, and delivering products [201]. However, there are some major challenges, such as adaptive routing protocols, flight trajectory selection, energy limitations, charging, and autonomous deployment that need to be addressed in FANETs. The main obstacles are the high mobility and unpredictable changes in the topology of FANETs. To overcome these shortcomings researchers have introduced Reinforcement Learning (RL) or deep RL algorithms in FANETs [202]. However, RL can be computationally expensive, but the outcome from using RL is promising in providing better performance in parameters such as energy consumption, flight time, communication delay, QoS and network lifetime.
9.3 UAV Data Analytics
With the rapid development of new technologies, efficiency of obtaining low altitude UAV images is increasing rapidly. The high-resolution images or videos which are captured by the multi-UAVs are used for various tasks such as maintenance, surveying, mapping and monitoring [203]. UAV data processing can be done by making use of established software such as Pix4D, sky-catch and so on. These already established softwares have offered an intelligent data analysis solution to make unstructured drone data into actionable and gain meaningful information from it [204].
10 Conclusion
UAVs are proving to be an important tool in many applications such as civil, commercial, defense, agriculture and so on. UAVs have capacity to offer essential support in disaster rescue operations. They can provide quick and effective survey (or coverage) of the affected area to assess the damage as well as to chalk a rescue strategy. This process can help to speed up the disaster management operation while reducing the risk to the life of personnel involved. In some cases, UAVs can be used to provide timely disaster warnings as well.
Though the single UAV usage and deployment itself has its own challenges, there are many benefits that the multi-UAV system can offer. It can provide robustness and reliability in critical applications such as disaster rescue operation. It also has capacity to provide wider surveillance in lesser amount of time. Co-operative nature of swarm of drones can prove beneficial in quickly adapting to the situation’s requirement. To make such multi-UAV networking system, efficient and tailor-made protocol stack is a must. In this paper, we discussed the challenges in developing protocols at different layers of the stack as well as efforts of researchers in developing various such protocols. A brief survey of various available software and for implementing these networks have also been provided. Future trends such as IoFT and use of machine learning have been highlighted.
References
Singh K, Verma AK (2019) Flying Adhoc Networks concept and challenges. In: Advanced methodologies and technologies in network architecture, mobile computing, and data analytics. IGI Global, Hershey, pp 903–911
Bekmezci I, Sahingoz OK, Temel Ş (2013) Flying Ad-hoc Networks (FANETs): a survey. Ad Hoc Netw 11(3):1254–1270
Agrawal DP (2017) Applications of sensor networks. In: Embedded sensor systems. Springer, Singapore, pp 35–63
Gupta L, Jain R, Vaszkun G (2015) Survey of important issues in UAV communication networks. IEEE Commun Surv Tutorials 18(2):1123–1152
Bekmezci İ, Ülkü EE (2015) Location information sharing with multi token circulation in Flying Ad-Hoc Networks. In: 2015 7th international conference on recent advances in space technologies (RAST). IEEE, pp 669–673
Li J, Zhou Y, Lamont L (2013) Architectures communication, protocols for networking unmanned aerial vehicles. In: IEEE Globecom workshops (GC workshops). IEEE 2013, pp 1415–1420
Deng L, Mao Z, Li X, Hu Z, Duan F, Yan Y (2018) UAV-based multispectral remote sensing for precision agriculture: a comparison between different cameras. ISPRS J Photogram Remote Sens 146:124–136
Kim J, Kim S, Ju C, Son HI (2019) Unmanned aerial vehicles in agriculture: a review of perspective of platform, control, and applications. IEEE Access 7:105100–105115
Li K, Voicu RC, Kanhere SS, Ni W, Tovar E (2019) Energy efficient legitimate wireless surveillance of UAV communications. IEEE Trans Vehicular Technol 68(3):2283–2293
Najiya K, Archana M (2018) UAV video processing for traffic surveillence with enhanced vehicle detection. In: 2018 Second international conference on inventive communication and computational technologies (ICICCT). IEEE, pp 662–668
Zeng Y, Zhang R, Lim TJ (2016) Wireless communications with unmanned aerial vehicles: opportunities and challenges. IEEE Commun Mag 54(5):36–42
Abdallah A, Ali MZ, Mišić J, Mišić VB (2019) Efficient security scheme for disaster surveillance UAV communication networks. Information 10(2):43
Erdelj M, Natalizio E (2016) UAV-assisted disaster management: applications and open issues. In: International conference on computing, networking and communications (ICNC). IEEE, pp 1–5
Erdelj M, Natalizio E, Chowdhury KR, Akyildiz IF (2017) Help from the sky: leveraging UAVs for disaster management. IEEE Pervasive Comput 16(1):24–32
Skorput P, Mandzuka S, Vojvodic H (2016) The use of Unmanned Aerial Vehicles for forest fire monitoring. In: International symposium ELMAR. IEEE, pp 93–96
Afghah F, Razi A, Chakareski J, Ashdown J (2019) Wildfire monitoring in remote areas using autonomous unmanned aerial vehicles. In: IEEE Conference on Computer Communications Workshops (INFOCOM Workshops) (IEEE INFOCOM 2019). IEEE, pp 835–840
Massive Wildfires in Uttrakhand (2021) https://timesofindia.indiatimes.com/city/dehradun/massive-wildfires-in-ukhand-almora-nainital-worst-hit/articleshow/69298238.cms. Accessed July 2021
Burgués J, Marco S (2020) Environmental chemical sensing using small drones: a review. Sci Tot Environ 748:141172
Salmoral G, Rivas Casado M, Muthusamy M, Butler D, Menon PP, Leinster P (2020) Guidelines for the use of unmanned aerial systems in flood emergency response. Water 12(2):521
Popescu D, Ichim L, Stoican F (2017) Unmanned aerial vehicle systems for remote estimation of flooded areas based on complex image processing. Sensors 17(3):446
Drones Scan Flood Hit Uttrakhand (2021) https://www.livemint.com/Politics/ZDib5YWR1G2Mcuth1kbwyO/Drones-scan-floodhit-Uttarakhand.html. Accessed July 2021
Drones to the Rescue (2021) https://www.thehindubusinessline.com/opinion/drones-to-the-rescue/article31500737.ece. Accessed July 2021
Euchi J (2020) Do drones have a realistic place in a pandemic fight for delivering medical supplies in healthcare systems problems. Chin J Aeronaut 34(2):182–190
A Drone Being Used for Locusts Control (2021) https://www.dnaindia.com/india/report-from-fighting-covid-19-to-locusts-drones-showcase- their-potential-and-wide-user-applications-2833235 accessed date: July 2021. Accessed July 2021
Estrada MAR, Ndoma A (2019) The uses of unmanned aerial vehicles-UAV’s-(or drones) in social logistic: natural disasters response and humanitarian relief aid. Procedia Comput Sci 149:375–383
Drones for Disaster Recovery (2021) https://www.terra-drone.net/global/2019/05/15/terra-drone-indonesia-lidar-drones-for-disaster-recovery-palu/. Accessed July 2021
Drones Assess the Aftermath of Indonesia’s Destructive Earthquake (2021) https://medium.com/aerial-acuity/drones-assess-the-aftermath-of-a-indonesias-destructive-earthquake-1e60611d0abd. Accessed July 2021
How Drones Are Helping Nepal Recover From The Earthquake (2021) https://www.huffpost.com/entry/nepal-earthquake-drones_n_7232764 (accessed date:July 2021). Accessed July 2021
Mapping Nepal (2021) Drones and the future of disaster relief. https://www.pix4d.com/blog/mapping-nepal (accessed date:July 2021). Accessed July 2021
Drones With Mikes to Fight Wildfires (2021) https://timesofindia.indiatimes.com/city/dehradun/now-mike-fitted-drones-to-fight-forest-fires/articleshow/69286260.cms. Accessed July 2021
How Drones are Useful in Forest Fire Response in California (2021) https://flytnow.com/drones-in-forest-fire-response/. Accessed July 2021
Singh SK et al (2015) A comprehensive survey on FANET: challenges and advancements. Int J Comput Sci Inf Technol 6(3):2010–2013
Hayat S, Yanmaz E, Muzaffar R (2016) Survey on unmanned aerial vehicle networks for civil applications: a communications viewpoint. IEEE Commun Surv Tutorials 18(4):2624–2661
Mozaffari M, Saad W, Bennis M, Nam Y-H, Debbah M (2019) A tutorial on UAVs for wireless networks: applications. challenges, and open problems. IEEE Commu Surveys Tutorials 21(3):2334–2360
Sahingoz OK (2014) Networking models in Flying Ad-hoc Networks (FANETs): concepts and challenges. J Intell Robot Syst 74(1):513–527
Mukherjee A, Dey N, Kausar N, Ashour AS, Taiar R, Hassanien AE (2019) A disaster management specific mobility model for Flying Ad-hoc Network. In: Emergency and disaster management: concepts, methodologies, tools, and applications. IGI Global, Hershey, pp 279–311
Kumari K, Maakar S, Sah B (2015) A brief survey of mobility model for FANET. In: Proceedings of national conference on innovative trends in computer science engineering, pp 106–108
Bouachir O, Abrassart A, Garcia F, Larrieu N (2014) A mobility model for UAV ad hoc network. In: International conference on unmanned aircraft systems (ICUAS). IEEE, pp 383–388
Bujari A, Calafate CT, Cano J-C, Manzoni P, Palazzi CE, Ronzani D (2017) Flying Ad-hoc Network application scenarios and mobility models. Int J Distrib Sensor Netw 13(10):1550147717738192
Sanchez-Garcia J, Garcia-Campos J, Toral S, Reina D, Barrero F (2015) A self organising aerial ad-hoc network mobility model for disaster scenarios. In: 2015 International conference on developments of E-systems engineering (DeSE). IEEE, pp 35–40
Al-Hourani A, Chandrasekharan S, Kandeepan S, Jamalipour A (2017) Aerial platforms for public safety networks and performance optimization. In: Wireless public safety networks, vol 3. Elsevier, Amsterdam, pp 133–153
Sun X, Ng DWK, Ding Z, Xu Y, Zhong Z (2019) Physical layer security in UAV systems: challenges and opportunities. IEEE Wirel Commun 26(5):40–47
Joh H, Yang I, Ryoo I (2016) The Internet of everything based on energy efficient P2P transmission technology with bluetooth low energy. Peer-to-Peer Netw Appl 9(3):520–528
Cheng C-M, Hsiao P-H, Kung H, Vlah D (2006) Performance measurement of 802.11 a wireless links from UAV to ground nodes with various antenna orientations. In: Proceedings of 15th international conference on computer communications and networks. IEEE, pp 303–308
Khan MA, Qureshi IM, Khanzada F (2019) A hybrid communication scheme for efficient and low-cost deployment of future Flying Ad-hoc Network (FANET). Drones 3(1):16
Bluetooth Core Specification, Bluetooth Special Interest Group (SIG) (2016) https://www.bluetooth.com/specifications/bluetooth-core-specification. Accessed July 2021
Afonso JA, Coelho ET, Carvalhal P, Ferreira MJO, Santos C, Silva LF, Almeida H (2006) Distributed sensing and actuation over bluetooth for unmanned air vehicles. In: Proceedings of IEEE international conference on robotics and automation, Orlando
Noor F, Khan MA, Al-Zahrani A, Ullah I, Al-Dhlan KA (2020) A review on communications perspective of Flying Ad-Hoc Networks: key enabling wireless technologies, applications, challenges and open research topics. Drones 4(4):65
Zafar W, Khan BM (2017) A reliable, delay bounded and less complex communication protocol for multicluster FANETs. Digit Commun Netw 3(1):30–38
Van den Bergh B, Chiumento A, Pollin S (2016) Ultra-reliable IEEE 802.11 for UAV video streaming: from network to application. In: International symposium on ubiquitous networking, Springer, Singapore, pp 637–647
Lin X, Yajnanarayana V, Muruganathan SD, Gao S, Asplund H, Maattanen H-L, Bergstrom M, Euler S, Wang Y-PE (2018) The sky is not the limit: LTE for unmanned aerial vehicles. IEEE Commun Mag 56(4):204–210
Qazi S, Siddiqui AS, Wagan AI (2015) UAV based real time video surveillance over 4G LTE. In: 2015 International conference on open source systems & technologies (ICOSST). IEEE, pp 141–145
Bazan O, Jaseemuddin M (2011) A survey on MAC protocols for wireless adhoc networks with beamforming antennas. IEEE Commun Surv Tutorials 14(2):216–239
Vashisht S, Jain S, Aujla GS (2020) Mac protocols for unmanned aerial vehicle ecosystems: review and challenges. Comput Commun 160:443–463
Li A, Wu G, Dong C, Zhang L (2020) CU-MAC: a MAC protocol for centralized UAV networks with directional antennas. IEICE Trans Commun 103(5):537–544
Liu X, Wei Z, Feng Z, Ning F (2017) UD-MAC: delay tolerant multiple access control protocol for unmanned aerial vehicle networks, in, (2017) IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC). IEEE 2017:1–6
Ye W, Heidemann J, Estrin D (2002) An energy-efficient MAC protocol for wireless sensor networks. In: Proceedings of twenty-first annual joint conference of the IEEE computer and communications societies, vol 3. IEEE, pp 1567–1576
Van Dam T, Langendoen K (2003) An adaptive energy-efficient MAC protocol for wireless sensor networks. In: Proceedings of the 1st international conference on embedded networked sensor systems, pp 171–180
Zheng T, Radhakrishnan S, Sarangan V (2005) PMAC: an adaptive energy-efficient MAC protocol for wireless sensor networks. In: 19th IEEE international parallel and distributed processing symposium, pp 1–8. https://doi.org/10.1109/IPDPS.2005.344
Wang W, Dong C, Zhu S, Wang H (2017) DFRA: demodulation-free random access for UAV ad-hoc networks. In: 2017 IEEE international conference on communications (ICC). IEEE, pp 1–6
Venkitasubramaniam P, Adireddy S, Tong L (2003) Opportunistic ALOHA and cross layer design for sensor networks. In: IEEE military communications conference, 2003 (MILCOM 2003), vol 1. IEEE, pp 705–710
Wang L, Li H, Jiang Y (2016) Adaptive-opportunistic ALOHA: a media access control protocol for unmanned aerial vehicle-wireless sensor network systems. Int J Distrib Sensor Netw 12(8):1550147716662785
Temel S, Bekmezci I (2015) LODMAC: location oriented directional MAC protocol for FANETs. Comput Netw 83:76–84
Wu G, Dong C, Li A, Zhang L, Wu Q (2018) FM-MAC: a multi-channel MAC protocol for FANETs with directional antenna. In: IEEE global communications conference (GLOBECOM). IEEE, pp 1–7
Say S, Inata H, Shimamoto S (2016) A hybrid collision coordination-based multiple access scheme for super dense aerial sensor networks. In: IEEE wireless communications and networking conferencea hybrid collision coordination-based multiple access scheme for super dense aerial sensor networks. IEEE, pp 1–6
Jiang A, Mi Z, Dong C, Wang H (2016) CF-MAC: a collision-free MAC protocol for UAVs ad-hoc networks. In: IEEE wireless communications and networking conference. IEEE, pp 1–6
Sotheara S, Aso K, Aomi N, Shimamoto S (2014) Effective data gathering and energy efficient communication protocol in Wireless Sensor Networks employing UAV. In: IEEE wireless communications and networking conference (WCNC). IEEE, pp 2342–2347
Sailaja S, Benakop PG (2018) Energy efficient and delay aware P-MAC protocol for wireless sensor network. Energy 8(3):37–45
Li H, Wang L, Pang S, Towhidnejad M (2014) A cross-layer design for data collecting of the UAV-wireless sensor network system. In: 12th IEEE International conference on embedded and ubiquitous computing. IEEE, pp 242–249
Ramli MR, Kim D-S, Lee JM (2018) Hybrid MAC protocol for UAV-assisted wireless sensor networks. Internet Things 14:100088
Secinti G, Darian PB, Canberk B, Chowdhury KR (2018) SDNs in the sky: robust end-to-end connectivity for aerial vehicular networks. IEEE Commun Mag 56(1):16–21
Khan MF, Yau K-LA, Noor RM, Imran MA (2020) Routing schemes in FANETs: a survey. Sensors 20(1):38
Hussen HR, Choi S-C, Park J-H, Kim J (2018) Performance analysis of MANET routing protocols for UAV communications. In: 2018 10th international conference on ubiquitous and future networks (ICUFN). IEEE, pp 70–72
de Silva R (2018) Next hop node selection in private UAV networks. In: 2018 International conference on advanced technologies for communications (ATC). IEEE, pp 248–252
Perkins CE, Bhagwat P (1994) Highly dynamic destination-sequenced distance-vector routing (DSDV) for mobile computers. ACM SIGCOMM Comput Commun Rev 24(4):234–244
Clausen T, Jacquet P, Adjih C, Laouiti A, Minet P, Muhlethaler P, Qayyum A, Viennot L (2003) Optimized Link State Routing Protocol (OLSR). IETF RFC 3626
Alshbatat AI, Dong L (2010) Cross layer design for mobile ad-hoc unmanned aerial vehicle communication networks. In: 2010 International conference on networking, sensing and control (ICNSC). IEEE, pp 331–336
Zheng Y, Wang Y, Li Z, Dong L, Jiang Y, Zhang H (2014) A mobility and load aware OLSR routing protocol for UAV mobile ad-hoc networks. In: Proceedings of IETICT, 2014, pp 1–7
Belhassen M, Belghith A, Abid MA (2011) Performance evaluation of a cartography enhanced OLSR for mobile multi-hop ad hoc networks. In: 2011 Wireless advanced. IEEE, pp 149–155
Singh K, Verma AK (2015) Experimental analysis of AODV, DSDV and OLSR routing protocol for flying adhoc networks (FANETs). In: 2015 IEEE international conference on electrical, computer and communication technologies (ICECCT). IEEE, pp 1–4
Vasiliev DS, Meitis DS, Abilov A (2014) Simulation-based comparison of AODV, OLSR and HWMP protocols for Flying Ad-Hoc networks. In: International conference on next generation wired/wireless networking. Springer, Cham, pp 245–252
Zucchi AC, Silveira RM (2018) Performance analysis of routing protocol for ad-hoc UAV network. In: Proceedings of the 10th Latin America networking conference, pp 73–80
Garcia-Santiago A, Castaneda-Camacho J, Guerrero-Castellanos JF, Mino-Aguilar G (2018) Evaluation of AODV and DSDV routing protocols for a FANET: further results towards robotic vehicle networks. In: IEEE 9th Latin American symposium on circuits & systems (LASCAS). IEEE, pp 1–4
Singh Y, Singh R et al (2018) Performance investigation of OLSR and AODV routing protocols for 3D FANET environment using NS3. J Commun Eng Syst 8(2):1–10
Ogier R, Templin F, Lewis M (2004) Topology dissemination based on reverse-path forwarding (TBRPF). Tech. Rep., IETF RFC 3684, February 2004
Johnson D, Hu Y-c, Maltz D et al (2007) The dynamic source routing protocol (DSR) for mobile ad-hoc networks for IPv4. Tech. Rep., RFC 4728
Perkins C, Belding-Royer E, Das S (2003) Ad hoc on-demand distance vector (AODV) routing. RFC 3561, Experimental, July 2003
Forsmann JH, Hiromoto RE, Svoboda J (2007) A time-slotted on-demand routing protocol for mobile ad hoc unmanned vehicle systems. In: Unmanned systems technology IX, vol 6561. International Society for Optics and Photonics, Bellingham, p 65611
Chow C-O, Ishii H (2008) Multiple tree multicast ad-hoc on-demand distance vector (MT-MAODV) routing protocol for video multicast over mobile ad -hoc networks. IEICE Trans Commun 91(2):428–436
Haas ZJ (2002) A hybrid framework for routing in ad-hoc networks. J of Ad hoc Netw
Beijar N (2002) Zone Routing Protocol (ZRP), vol 9. Networking Laboratory, Helsinki University of Technology, Finland, pp 1–12
Yang K, Ma J-F, Miao Z-H (2009) Hybrid Routing Protocol for Wireless Mesh Network. In: International conference on computational intelligence and security, vol 1. IEEE, pp 547–551
Ramasubramanian V, Haas ZJ, Sirer EG (2003) SHARP: a hybrid adaptive routing protocol for mobile ad hoc networks. In: Proceedings of the 4th ACM international symposium on mobile ad hoc networking & computing, pp 303–314
Park V, Corson S (2001) Temporally-Ordered Routing Algorithm (TORA). Tech. Rep., IETF Internet Draft
Pojda J, Wolff A, Sbeiti M, Wietfeld C (2011) Performance analysis of mesh routing protocols for UAV swarming applications. In: 8th International symposium on wireless communication systems. IEEE, pp 317–321
Kulkarni SA, Rao GR (2008) Mobility and energy-based performance analysis of temporally ordered routing algorithm for ad-hoc wireless network. IETE Tech Rev 25(4):222–227
Khelifi F, Bradai A, Singh K, Atri M (2018) Localization and energy-efficient data routing for unmanned aerial vehicles: fuzzy-logic-based approach. IEEE Commun Mag 56(4):129–133
Oubbati OS, Mozaffari M, Chaib N, Lorenz P, Atiquzzaman M, Jamalipour A (2019) ECaD: energy-efficient routing in flying ad-hoc networks. Int J Commun Syst 32(18):e4156
Uddin MA, Mansour A, Jeune DL, Ayaz M, Aggoune E-HM (2018) UAV-assisted dynamic clustering of wireless sensor networks for crop health monitoring. Sensors 18(2):555
Li X, Huang J (2017) ABPP: an adaptive beacon sheme for geographic routing in FANET. In: 2017 18th international conference on parallel and distributed computing, applications and technologies (PDCAT). IEEE, pp 293–299
Rosati S, Krużelecki K, Traynard L, Mobile BR (2013) Speed-aware routing for UAV ad-hoc networks. In: IEEE GLOBECOM Workshops (GC Workshps). IEEE, pp 1367–1373
Hyeon S, Kim K-I, Yang S (2010) A new geographic routing protocol for aircraft ad-hoc networks. In: 29th Digital avionics systems conference. IEEE, p 2–E
Zhou J, Chen Y, Leong B, Sundaramoorthy PS (2010) Practical 3D geographic routing for wireless sensor networks. In: Proceedings of the 8th ACM conference on embedded networked sensor systems, pp 337–350
Lin L, Sun Q, Wang S, Yang F (2012) A geographic mobility prediction routing protocol for ad hoc UAV network. In: IEEE Globecom Workshops. IEEE, pp 1597–1602
Medina D, Hoffmann F, Rossetto F, Rokitansky C-H (2011) A geographic routing strategy for North Atlantic in-flight Internet access via airborne mesh networking. IEEE/ACM Trans Netw 20(4):1231–1244
Karp B, Kung H-T (2000) GPSR: greedy perimeter stateless routing for wireless networks. In: Proceedings of the 6th annual international conference on mobile computing and networking, pp 243–254
Sakhaee E, Jamalipour A, Kato N (2006) Networks aeronautical ad-hoc. In: IEEE wireless communications and networking conference, WCNC 2006, vol 1. IEEE, pp 246–251
Bousbaa FZ, Kerrache CA, Mahi Z, Tahari AEK, Lagraa N, Yagoubi MB (2020) GeoUAVs: a new geocast routing protocol for fleet of UAVs. Comput Commun 149:259–269
Shirani R, St-Hilaire M, Kunz T, Zhou Y, Li J, Lamont L (2012) On the delay of reactive-greedy-reactive routing in unmanned aeronautical ad-hoc networks. Procedia Comput Sci 10:535–542
Kamali S, Opatrny J (2007) POSANT: a position based ant colony routing algorithm for mobile ad-hoc networks. In: 2007 3rd international conference on wireless and mobile communications (ICWMC’07). IEEE, p 21
Leonov AV (2016) Application of Bee Colony Algorithm for FANET routing. In: 17th International conference of young specialists on micro/nanotechnologies and electron devices (EDM). IEEE, pp 124–132
Yu Y, Ru L, Chi W, Liu Y, Yu Q, Fang K (2016) Ant colony optimization based polymorphism-aware routing algorithm for ad-hoc UAV network. Multimedia Tools Appl 75(22):14451–14476
Yang Q, Yoo S-J (2018) Optimal UAV Path planning: sensing data acquisition over IoT sensor networks using multi-objective bio-inspired algorithms. IEEE Access 6:13671–13684
Sami Oubbati O, Chaib N, Lakas A, Bitam S, Lorenz P (2020) U2RV: UAV-assisted reactive routing protocol for VANETs. Int J Commun Syst 33(10):e4104
Lin L, Sun Q, Li J, Yang F (2012) A novel geographic position mobility oriented routing strategy for UAVs. J Comput Inf Syst 8(2):709–716
Kim B-S, Kim K-I, Roh B, Choi H (2018) A new routing protocol for UAV relayed tactical mobile ad hoc networks. In: Wireless telecommunications symposium (WTS). IEEE, pp 1–4
Hussen HR, Choi S-C, Park J-H, Kim J (2019) Predictive geographic multicast routing protocol in Flying Ad-hoc Networks. Int J Distrib Sensor Netw 15(7):1550147719843879
Gupta NK, Yadav RS, Nagaria RK (2020) 3D geographical routing protocols in wireless ad-hoc and sensor networks: an overview. Wirel Netw 26(4):2549–2566
Jafarizadeh V, Keshavarzi A, Derikvand T (2017) Efficient cluster head selection using naïve Bayes classifier for wireless sensor networks. Wirel Netw 23(3):779–785
Tazibt CY, Bekhti M, Djamah T, Achir N, Boussetta K (2017) Wireless sensor network clustering for UAV-based data gathering. In: Proceedings of the 2017 wireless days. IEEE, pp 245–247
Wang J, Jiang C, Han Z, Ren Y, Maunder RG, Hanzo L (2017) Taking drones to the next level: cooperative distributed unmanned-aerial-vehicular networks for small and mini drones. IEEE VehIcular Technol Mag 12(3):73–82
Elston J, Argrow B, Houston A, Lahowetz J (2009) Distributed Amospheric Sensing Using Small UAS and Doppler Radar, in: AIAA Infotech@ Aerospace Conference and AIAA Unmanned... Unlimited Conference, p. 2023
Fu Z, Luo H, Zerfos P, Lu S, Zhang L, Gerla M (2005) The impact of multihop wireless channel on TCP performance. IEEE Trans Mobile Comput 4(2):209–221
AUS/SDP Transport Specification (2009) Network Environmental Committee. http://standards.sae.org/as5669a/
Böhmer M, Schmidt A, Pereira PG, Herfet T (2020) Latency-aware and-predictable communication with open protocol stacks for remote drone control. In: 2020 16th international conference on distributed computing in sensor systems (DCOSS). IEEE, pp 304–311
Jiang S, Zhang Q, Wu A, Liu Q, Wu J, Xia P (2018) A low-latency reliable transport solution for network-connected UAV. In: 2018 10th International conference on communication software and networks (ICCSN). IEEE, pp 511–515
Chirwa RM, Lauf AP (2014) Performance improvement of transmission in Unmanned Aerial Systems using multipath TCP. In: IEEE International symposium on signal processing and information technology (ISSPIT). IEEE, pp 000019–000024
Serano D (2015) Introduction to JAUS for unmanned systems interoperability–joint architecture for unmanned systems. Tech. Rep., STO-EN-SCI-271-02
Jung W-S, Yim J, Ko Y-B (2018) Adaptive offloading with MPTCP for unmanned aerial vehicle surveillance system. Ann Telecommun 73(9):613–626
Li B, Fei Z, Zhang Y, Guizani M (2019) Secure UAV communication networks over 5G. IEEE Wirel Commun 26(5):114–120
Zhou Y, Rao B, Wang W (2020) UAV swarm intelligence: recent advances and future trends. IEEE Access 8:183856–183878
Vasiliev D, Chunaev A, Abilov A, Kaysina I, Meitis D (2019) Application layer ARQ and network coding for QoS improving in UAV-assisted networks. In: 25th Conference of open innovations association (FRUCT). IEEE, pp 353–360
Arafat MY, Moh S (2018) A survey on cluster-based routing protocols for unmanned aerial vehicle networks. IEEE Access 7:498–516
You W, Dong C, Cheng X, Zhu X, Wu Q, Chen G (2020) Joint optimization of area coverage and mobile-edge computing with clustering For FANETs. IEEE Internet Things J 8(2):695–707
Cheng X, Dong C, Dai H, Chen G (2018) MOOC: a mobility control based clustering scheme for area coverage in FANETs. In: IEEE 19th international symposium on “A world of wireless, mobile and multimedia networks” (WoWMoM). IEEE, pp 14–22
Zang C, Zang S (2011) Mobility prediction clustering algorithm for UAV networking. In: IEEE GLOBECOM workshops (GC Workshops). IEEE, pp 1158–1161
Farmani N, Sun L, Pack DJ (2017) A scalable multitarget tracking system for cooperative unmanned aerial vehicles. IEEE Trans Aerosp Electron Syst 53(4):1947–1961
Liu K, Zhang J, Zhang T, Algorithm The Clustering, of UAV Networking in Near-Space, in, (2008) 8th International symposium on antennas, propagation and EM theory. IEEE 2008:1550–1553
Aadil F, Raza A, Khan MF, Maqsood M, Mehmood I, Rho S (2018) Energy aware cluster-based routing in Flying Ad-hoc networks. Sensors 18(5):1413
Bhandari S, Wang X, Lee R (2020) Mobility and location-aware stable clustering scheme for UAV networks. IEEE Access 8:106364–106372
Lakas A, Belkacem AN, Al Hassani S (2020) An Adaptive Multi-clustered Scheme for Autonomous UAV swarms. In: International wireless communications and mobile computing (IWCMC). IEEE, pp 1567–1572
Hao F, Zhang J, Duan Z, Zhao L, Guo L, Park D-S (2020) Urban area function zoning based on user relationships in location-based social networks. IEEE Access 8:23487–23495
Banik S, Mowla MM, Sarkar P (2019) A new routing scheme for multi-cluster flying ad- hoc networks. In: 2019 5th International conference on advances in electrical engineering (ICAEE). IEEE, pp 323–328
Ganeriwal S, Pöpper C, Čapkun S, Srivastava MB (2008) Secure time synchronization in sensor networks. ACM Trans Inf Syst Security (TISSEC) 11(4):1–35
Liu Y, Li J, Guizani M (2012) Lightweight secure global time synchronization for Wireless sensor networks. In: IEEE Wireless communications and networking conference (WCNC). IEEE, pp 2312–2317
Jingchao W, Ruohan Z, Weiwen G (2019) Time synchronization in networks: a survey. In: Proceedings of the 2nd International conference on control and computer vision, pp 121–126
Eidson JC, Tengdin J (2003) IEEE 1588 standard for a precision clock synchronization protocol for networked measurement and control systems and applications to the power industry. Distributech 2003:4–6
Mahmood A, Exel R, Sauter T (2014) Delay and jitter characterization for software-based clock synchronization over WLAN using PTP. IEEE Trans Ind Inf 10(2):1198–1206
Kim H, Ishikawa M, Yamakawa Y (2018) Reference broadcast frame synchronization for distributed high-speed camera network. In: IEEE sensors applications symposium (SAS). IEEE, pp 1–5
Ganeriwal S, Srivastava MB (2003) Timing-Sync Protocol for Sensor Networks (TPSN) on Berkeley Motes
Maróti M, Kusy B, Simon G, Lédeczi A (2004) The flooding time synchronization protocol. In: Proceedings of the 2nd international conference on Embedded networked sensor systems, pp 39–49
Fotedar N, Saini P (2017) An energy efficient algorithm for time synchronization in sensor networks. In: Proceedings of the international conference on high performance compilation, computing and communications, pp 91–96
Shin Y-J, Lee J-R (2013) Time synchronization protocol in ad-hoc network. In: The international conference on information networking 2013 (ICOIN). IEEE, pp 375–378
Guo M, Wang F, Peng F, Lin S-c (2020) Design of distributed network clock-synchronization for swarm UAV. In: 2020 International conference on computing and data science (CDS). IEEE, pp 194–197
Liu T, Hu Y, Hua Y, Wu M (2017) Research on autonomous high-precision time synchronization method of UAVs based on side-tone signal. In: Joint conference of the European frequency and time forum and IEEE international frequency control symposium (EFTF/IFCS). IEEE, pp 686–689
Tao L, Yonghui H, Yu H, Meifang W (2015) Study on Autonomous and Distributed Time Synchronization Method for Formation UAVs, in: 2nd International Conference on Electrical, Computer Engineering and Electronics (ICECEE 2015)
Tan Z, Yang X, Pang M, Gao S, Li M, Chen P (2020) UAV-assisted low-consumption time synchronization utilizing cross-technology communication. Sensors 20(18):5134
Rezazadeh J, Moradi M, Ismail AS, Dutkiewicz E (2014) Superior path planning mechanism for mobile beacon-assisted localization in wireless sensor networks. IEEE Sensors J 14(9):3052–3064
Perazzo P, Sorbelli FB, Conti M, Dini G, Pinotti CM (2016) Drone path planning for secure positioning and secure position verification. IEEE Trans Mobile Comput 16(9):2478–2493
Pinotti CM, Betti Sorbelli F, Perazzo P, Dini G (2016) Localization with guaranteed bound on the position error using a drone. In: Proceedings of the 14th ACM international symposium on mobility management and wireless access, pp 147–154
Shule W, Almansa CM, Queralta JP, Zou Z, Westerlund T (2020) UWB-based localization for multi-UAV systems and collaborative heterogeneous multi-robot systems. Procedia Comput Sci 175:357–364
Atif M, Ahmad R, Ahmad W, Zhao L, Rodrigues JJ (2021) UAV-assisted wireless localization for search and rescue. IEEE Syst J 15:3261–3272
Büyükçorak S, Kurt GK, Yongaçoğlu A (2019) UAV assisted ground user localization. In: 2019 IEEE international conference on wireless for space and extreme environments (WiSEE). IEEE, pp 111–115
Aslan S, Demirci S (2019) Solving UAV localization problem with artificial bee colony (ABC) algorithm. In: 2019 4th International conference on computer science and engineering (UBMK). IEEE, pp 735–738
Arafat MY, Moh S (2019) Localization and clustering based on swarm intelligence in UAV networks for emergency communications. IEEE Internet Things J 6(5):8958–8976
Sánchez-García J, Reina D, Toral S (2019) A distributed PSO-based exploration algorithm for a UAV network assisting a disaster scenario. Fut Gen Comput Syst 90:129–148
Maeda K, Doki S, Funabora Y, Doki K (2018) Flight path planning of multiple UAVs for robust localization near infrastructure facilities. In: IECON 2018—44th annual conference of the IEEE Industrial Electronics Society. IEEE, pp 2522–2527
Villas LA, Boukerche A, Guidoni DL, Maia G, Loureiro AA (2013) A joint 3D localization and synchronization solution for wireless sensor networks using UAV. In: 38th annual IEEE conference on local computer networks. IEEE, pp 719–722
Cardoso CB, Guidoni DL, Kimura BY, Villas LA (2017) A hybrid Solution for 3D Location and Time Synchronization in WSN, in: Proceedings of the 15th ACM International Symposium on Mobility Management and Wireless Access, pp. 105–112
Rodriguez-Fernandez V, Menéndez HD, Camacho D (2015) Design and development of a lightweight multi-UAV simulator. In: 2015 IEEE 2nd international conference on cybernetics (CYBCONF). IEEE, pp 255–260
Craighead J, Murphy R, Burke J, Goldiez B (2007) A survey of commercial & open source unmanned vehicle simulators. In: Proceedings 2007 IEEE international conference on robotics and automation. IEEE, pp 852–857
Brown T, Doshi S, Jadhav S, Himmelstein J (2004) Test bed for a wireless network on small UAVs. In: AIAA 3rd “unmanned unlimited” technical conference, workshop and exhibit, p 6480
Robotics B, Lab IM (2021) BEAR: Berkeley Aerobot Team. https://ptolemy.berkeley.edu/projects/robotics/bear/testbeds.html (accessed date: July). Accessed July 2021
Kim HJ, Shim DH, Sastry S (200) Nonlinear model predictive tracking control for rotorcraft-based unmanned aerial vehicles. In: Proceedings of the 2002 American control conference (IEEE Cat. No. CH37301), vol 5. IEEE, pp 3576–3581
How JP, Behihke B, Frank A, Dale D, Vian J (2008) Real-time indoor autonomous vehicle test environment. IEEE Control Syst Mag 28(2):51–64
Michael N, Mellinger D, Lindsey Q, Kumar V (2010) The GRASP multiple micro-UAV testbed. IEEE Robot Autom Mag 17(3):56–65
Cameron S, Hailes S, Julier S, McClean S, Parr G, Trigoni N, Ahmed M, McPhillips G, De Nardi R, Nie J et al (2010) SUAAVE: combining aerial robots and wireless networking. In: 25th International UAV systems conference
Johnson E Georgia Tech. UAV Research Facility. http://controls.ae.gatech.edu/wiki/UAV_Research_Facility
Christmann HC (2008) Self-configuring ad-hoc networks for unmanned aerial systems. PhD thesis, Georgia Institute of Technology
Vogeltanz T (2016) A survey of free software for the design, analysis, modelling, and simulation of an unmanned aerial vehicle. Arch Comput Methods Eng 23(3):449–514
Yun C, Li X (2013) Design of UAV flight simulation software based on simulation training method. WSEAS Trans Inf Sci Appl 10(2):37–46
Zhang J, Geng Q, Fei Q (2012) UAV flight control system modeling and simulation based on FlightGear. In: International conference on automatic control and artificial intelligence (ACAI 2012). IET, pp 2231–2234
Perhinschi MG, Wilburn B, Wilburn J, Moncayo H, Karas O (2013) Simulation environment for UAV fault tolerant autonomous control laws development. J Model Identif Control 1(4):164–195
Pujol-Gonzalez M, Cerquides J, Meseguer P (2014) MAS-planes: a multi-agent simulation environment to investigate decentralised coordination for teams of UAVs. In: Proceedings of the 13th international conference on autonomous agents and multiagent systems (AAMAS 2014), 5–9 May 2014
Goktogan AH, Nettleton E, Ridley M, Sukkarieh S (2003) Real time multi-UAV simulator. In: 2003 IEEE International conference on robotics and automation (Cat. No. 03CH37422), vol 2. IEEE, pp 2720–2726
Garcia R, Barnes L (2009) Multi-UAV simulator utilizing X-plane. In: Selected papers from the 2nd international symposium on UAVs, Reno, Nevada, USA, 8–10 June 2009. Springer, Dordrecht, pp 393–406
Lu P, Geng Q (2011) Real-time simulation system for UAV based on Matlab/Simulink. In: IEEE 2nd international conference on computing, control and industrial engineering, vol 1. IEEE, pp 399–404
Bin H, Justice A (2009) The design of an unmanned aerial vehicle based on the ArduPilot. Indian J Sci Technol 2(4):12–15
Koenig N, Howard A (2004) Design and use paradigms for Gazebo, an open-source multi-robot simulator. In: 2004 IEEE/RSJ International conference on intelligent robots and systems (IROS) (IEEE Cat. No. 04CH37566), vol 3. IEEE, pp 2149–2154
Quigley M, Conley K, Gerkey B, Faust J, Foote T, Leibs J, Wheeler R, Ng AY et al (2009) ROS: an open-source robot operating system. In: ICRA workshop on open source software, vol 3, Japan, Kobe, p 5
Ahn T, Seok J,Lee I, Han J (2018) Reliable flying IoT networks for UAV disaster rescue operations. Mobile Inf Syst. https://doi.org/10.1155/2018/2572460
Kate B, Waterman J, Dantu K, Welsh M (2012) Simbeeotic: a simulator and testbed for micro-aerial vehicle swarm experiments. In: 2012 ACM/IEEE 11th international conference on information processing in sensor networks (IPSN). IEEE, pp 49–60
Issariyakul T, Hossain E (2009) Introduction to network simulator 2 (NS2). In: Introduction to network simulator NS2. Springer, Boston, pp 1–18
Carneiro G (2010) NS-3: network simulator 3. In: UTM Lab Meeting, vol 20, pp 4–5
Subramanya Bhat M, Shwetha D, Devaraju JT (2011) A performance study of proactive, reactive and hybrid routing protocols using Qualnet simulator. Int J Comput Appl 975:8887
Varga A, Hornig R (2008) An overview of the OMNeT++ simulation environment. In: Proceedings of the 1st international conference on simulation tools and techniques for communications, networks and systems and workshops, pp 1–10
Zaidi S, Atiquzzaman M, Calafate CT (2020) Internet of Flying Things (IoFT): a survey. Comput Commun 165:53–74
Fan Q, Ansari N (2018) Towards traffic load balancing in drone-assisted communications for IoT. IEEE Internet Things J 6(2):3633–3640
Kim H, Ben-Othman J (2018) A collision-free surveillance system using smart UAVs in multi domain IoT. IEEE Commun Lett 22(12):2587–2590
Marchese M, Moheddine A, Patrone F (2019) IoT and UAV integration in 5G hybrid terrestrial-satellite networks. Sensors 19(17):3704
Bithas PS, Michailidis ET, Nomikos N, Vouyioukas D, Kanatas AG (2019) A survey on machine-learning techniques for UAV-based communications. Sensors 19(23):5170
Mowla NI, Tran NH, Doh I, Chae K (2020) AFRL: adaptive federated reinforcement learning for intelligent jamming defense in FANET. J Commun Netw 22(3):244–258
Sekeroglu B, Tuncal K (2020) Image processing in unmanned aerial vehicles. In: Al-Turjman F (eds) Unmanned aerial vehicles in smart cities. Unmanned system technologies. Springer, Cham, pp 167–179
Yu J, Vandanapu A, Qu C, Wang S, Calyam P (2020) Energy-aware dynamic computation offloading for video analytics in multi-UAV systems. In: 2020 International conference on computing, networking and communications (ICNC). IEEE, pp 641–647
Acknowledgements
This publication is part of the “Flying Ad hoc Network for disaster rescue operations (SERB-SRG/2019/001204)” project sanctioned by Science and Engineering Research Board (SERB), India.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Dhall, R., Dhongdi, S. Review of Protocol Stack Development of Flying Ad-hoc Networks for Disaster Monitoring Applications. Arch Computat Methods Eng 30, 37–68 (2023). https://doi.org/10.1007/s11831-022-09791-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11831-022-09791-y