
Abstract
Images that have been contaminated by various kinds of blur and noise can be restored by the minimization of an \(\ell ^p\)-\(\ell ^q\) functional. The quality of the reconstruction depends on the choice of a regularization parameter. Several approaches to determine this parameter have been described in the literature. This work presents a numerical comparison of known approaches as well as of a new one.
Similar content being viewed by others


1 Introduction
In many areas of Science and Engineering, ranging from medical diagnostics to natural sciences [17, 29, 34], we are faced with the solution of linear systems of equations of the form
where \(A\in {{\mathbb {R}}}^{m\times n}\) is a large matrix whose singular values decrease to zero with increasing index number without a significant gap. The matrix A then is severely ill-conditioned and may be rank-deficient. In many applications, the right-hand side \(\mathbf {b}^\delta \in {{\mathbb {R}}}^m\) represents available data that is contaminated by error. The quantity \(\varvec{\eta }\in {{\mathbb {R}}}^m\) collects measurement and discretization errors; it is not explicitly known. The vector \(\mathbf {x}\in {{\mathbb {R}}}^n\) represents the signal that we would like to determine. Problems of this kind often are referred to as linear discrete ill-posed problems; see, e.g., [19]. We remark that, in imaging applications, as the ones considered here, the unknown \(\mathbf {x}\) as well as the observed data \(\mathbf {b}^\delta \) and the additive noise \(\varvec{\eta }\) are vectorized forms of \(n_1\times n_2\) and \(m_1\times m_2\) 2D signals, respectively, with \(n=n_1 n_2\) and \(m=m_1 m_2\).
Let \(\mathbf {b}=\mathbf {b}^\delta -\varvec{\eta }\) denote the unknown error-free vector associated with \(\mathbf {b}^\delta \). We are interested in determining the solution \(\mathbf {x}^\dagger \) of the least squares problem \(\min _{\mathbf {x}\in {{\mathbb {R}}}^n}\Vert A\mathbf {x}-\mathbf {b}\Vert _2\) of minimal Euclidean norm. This solution can be expressed as \(\mathbf {x}^\dagger =A^\dagger \mathbf {b}\), where \(A^\dagger \) denotes the Moore-Penrose pseudo-inverse of A. Since the vector \(\mathbf {b}\) is not available, it is natural to try to determine the vector \(\mathbf {x}=A^\dagger \mathbf {b}^\delta \). However, due to the ill-conditioning of A and the error \(\varvec{\eta }\) in \(\mathbf {b}^\delta \), the latter vector often is a meaningless approximation of the desired vector \(\mathbf {x}^\dagger \).
To compute a meaningful approximation of \(\mathbf {x}^\dagger \) one may resort to regularization methods. These methods replace the ill-posed problem (1) by a nearby well-posed one that is less sensitive to the perturbation in \(\mathbf {b}^\delta \) and whose solution is an accurate approximation of \(\mathbf {x}^\dagger \). Among the various regularization methods described in the literature, the \(\ell ^p\)-\(\ell ^q\) minimization method has attracted considerable attention in recent years; see, e.g., [4, 12, 21, 23]. This method computes a regularized solution of (1) by solving the minimization problem
where \(0<p,q\le 2\), \(\mu >0\) is a regularization parameter, and the matrix \(L\in {{\mathbb {R}}}^{s\times n}\) is chosen so that \({\mathcal {N}}(A)\cap {\mathcal {N}}(L)=\{\mathbf {0}\}\); here \({\mathcal {N}}(M)\) denotes the null space of the matrix M and
Note that \(\mathbf {z}\rightarrow \Vert \mathbf {z}\Vert _s\) is not a norm for \(0<s<1\), but for convenience, we nevertheless will refer to this function as a norm also for these values of s.
The first term in (2) ensures that the reconstructed signal fits the measured data, while the second term enforces some a priori information on the reconstruction. The parameter \(\mu \) balances the two terms and determines the sensitivity of the solution of (2) to the noise in \(\mathbf {b}^\delta \). An ill-suited choice of \(\mu \) leads to a solution of (2) that is a poor approximation of \(\mathbf {x}^\dagger \). It therefore is of vital importance to determining a suitable value of \(\mu \).
It is the purpose of this paper to review and compare a few popular parameter choice rules that already have been proposed for \(\ell ^p\)-\(\ell ^q\) minimization, and to apply, for the first time, a whiteness-based criterion described by Lanza et al. [27].
We briefly comment on the choices of p and q, for which several automatic selection strategies have been developed; see, e.g., [28] and references therein. However, since the focus of this work is the selection of the regularization parameter \(\mu \), the parameters p and q are considered to be fixed a priori; we assume that they have been set to suitable values.
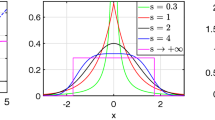
The choice of p should be informed by the statistical properties of the noise. We consider two types of noise, namely noise that can be described by the Generalized Error Distribution (GED) and impulse noise. In the first case the entries of \(\varvec{\eta }\) are independent realization of a random variable with density function
where \(c_{\theta ,\sigma }\) is a constant such that \(\int _{{\mathbb {R}}}\xi _{\theta ,\nu \,\sigma }(t)dt=1\), \(\nu \in {{\mathbb {R}}}\), and \(\theta ,\sigma >0\). For \(\theta =2\), (3) reduces to the Gaussian density function, while for \(\theta =1\) we obtain the Laplace distribution. It is shown in [6] that, for this kind of noise, the maximum a posteriori principle prescribes that \(p=\theta \).
The data \(\mathbf {b}^\delta \) are said to be affected by impulse noise of level \(\sigma \) if
where \(r_j\) is a uniformly distributed random variable in the dynamic range of \(\mathbf {b}\). Numerical experience indicates that it is beneficial to let \(p<1\) when \(\mathbf {b}^\delta \) is contaminated by impulse noise; see, e.g., [6, 21, 23] for illustrations.
The choice of the parameter q is determined by a priori knowledge of the desired solution that we would like to impose on the computed solution. In particular, it is often known that \(L\mathbf {x}\) is sparse, i.e., \(L\mathbf {x}\) has few nonvanishing entries. This is true, for instance, if L is a discretization of a differential operator or a framelet/wavelet operator. In this case, one ideally would want to let \(q=0\), where the \(\ell ^0\)-norm of a vector \(\mathbf {x}\) measures the number of nonzero entries.
However, minimizing the \(\ell ^0\)-norm is an NP-hard problem. Therefore, it is prudent to approximate the \(\ell ^0\)-norm by an \(\ell ^q\)-norm with \(0<q\le 1\). For smaller values of \(q>0\), the \(\ell ^q\)-norm approximates the \(\ell ^0\)-norm better, however, the minimizing algorithm requires more iterations the smaller \(q>0\) is, and may suffer from numerical instability for “tiny” \(q>0\). Therefore, it is usually a good practice to set q small enough, but not too small. We remark that the \(\ell ^q\)-norm does not satisfy all properties of a norm for \(0<q<1\).
This paper is organized as follows: Sect. 2 outlines two algorithms for computing an approximate solution of (2). In Sect. 3 we describe the methods for determining \(\mu \) that are compared in this paper. We report some numerical results in Sect. 4 and draw conclusions in Sect. 5.
2 Majorization-minimization in generalized Krylov subspaces
In [21] the authors proposed an effective iterative method for the solution of (2). At each iteration, a smoothed version of the \(\ell ^p\)-\(\ell ^q\) functional, denoted by \({\mathcal J}_\varepsilon \), is majorized by a quadratic functional that is tangent to \({{\mathcal {J}}}_\varepsilon \) at the current iterate \(\mathbf {x}^{(k)}\). Then, the quadratic tangent majorant is minimized and the minimizer \(\mathbf {x}^{(k+1)}\) is the new iterate; see below. Two approaches to determine quadratic majorants are described in [21]. We will outline both.
Majorization step. Consider the functional
that is minimized in (2). It is shown in [8] that this functional has a global minimizer. When \(0<\min \{p,q\}<1\), the functional (4) is neither convex nor differentiable. To construct a quadratic majorant, the functional has to be continuously differentiable. We, therefore, introduce a smoothed version
for some \(\varepsilon >0\), where
Since \(\varPhi _{s,\varepsilon }\) is a differentiable function of t, \({\mathcal {J}}_\varepsilon (\mathbf {x})\) is everywhere differentiable. We will comment on the choice of \(\varepsilon \) in Sect. 4.
We would like to compute
When \(\min \{p,q\}>1\), the functional \({\mathcal {J}}_\varepsilon (\mathbf {x})\) is strictly convex and therefore the minimization problem (5) has a unique minimum. On the other hand, if \(\min \{p,q\}<1\), which is the situation of interest to us, then the functional (5) generally is not convex. The methods we describe here therefore determine a stationary point.
Let \(\mathbf {x}^{(k)}\) be the currently available approximation of \(\mathbf {x}^*\) in (5). We first describe the majorant referred to as “adaptive” in [21]. This majorant is such that the quadratic approximation of each component of \({\mathcal {J}}_\varepsilon (\mathbf {x})\) at \(\mathbf {x}^{(k)}\) has an as large as possible positive second order derivative. In general, each component is approximated by a different quadratic polynomial. We denote the adaptive quadratic tangent majorant of \({\mathcal {J}}_\varepsilon (\mathbf {x})\) at \(\mathbf {x}^{(k)}\) by \({\mathcal Q}^A(\mathbf {x},\mathbf {x}^{(k)})\). It is characterized by
where \(\nabla _\mathbf {x}\) denotes the gradient with respect to \(\mathbf {x}\).
The functional \({{\mathcal {Q}}}^A(\mathbf {x},\mathbf {x}^{(k)})\) can be constructed as follows: Evaluate the residual vectors
and compute the weight vectors
where all the operations are meant element-wise. The weight vectors determine the diagonal matrices
Then
where \(c\in {{\mathbb {R}}}\) is a constant that is independent of \(\mathbf {x}\); see [21] for details. The new approximation of \(\mathbf {x}^*\) is given by the minimizer \(\mathbf {x}^{(k+1)}\) of \({\mathcal {Q}}^A(\mathbf {x},\mathbf {x}^{(k)})\). We discuss the computation of an approximation or this minimizer below.
The second type of majorant considered in [21] is referred to as “fixed.” This majorant is constructed so that each component of the quadratic polynomial majorants have the same leading coefficient. As shown below, the evaluation of the fixed majorant at \(\mathbf {x}\) requires less computational work than the computation of the adaptive majorant. However, in general, the method defined by fixed majorants requires more iterations than the method defined by adaptive majorants to reach numerical convergence.
For the fixed case the weight vectors are given by
and determine the fixed quadratic tangent majorant
of \({{\mathcal {J}}}_\varepsilon \) at \(\mathbf {x}^{(k)}\). Here \(\langle \cdot ,\cdot \rangle \) denotes the standard inner product and the constant \(c\in {{\mathbb {R}}}\) is independent of \(\mathbf {x}\). The functional \({\mathcal {Q}}^F(\mathbf {x},\mathbf {x}^{(k)})\) satisfies the properties (6) with \({\mathcal {Q}}^A(\mathbf {x},\mathbf {x}^{(k)})\) replaced by \({\mathcal {Q}}^F(\mathbf {x},\mathbf {x}^{(k)})\); see [21] for details.
Minimization step. We describe how to compute minimizers of \({\mathcal {Q}}^A\) and \({\mathcal {Q}}^F\) when the matrix \(A\in {{\mathbb {R}}}^{m\times n}\) is large. To reduce the computational effort, we compute an approximate solution in a subspace \({\mathcal {V}}_k\) of fairly small dimension \({\widehat{k}}\ll \min \{m,n\}\). Let the columns of the matrix \(V_k\in {{\mathbb {R}}}^{n\times {\widehat{k}}}\) form an orthonormal basis for \({\mathcal {V}}_k\). We determine approximations of the minima of \({\mathcal {Q}}^A\) and \({\mathcal {Q}}^F\) of the form
where \(\mathbf {y}^{(k+1)}\in {{\mathbb {R}}}^{{\widehat{k}}}\).
We first discuss the adaptive case. We would like to solve
and denote the solution by \(\mathbf {x}^{(k+1)}\). This minimization problem is equivalent to
Introduce the economic QR factorizations
and compute
where the superscript \(^T\) denotes transposition. Assume that
This condition typically holds in applications of interest to us. The solution \(\mathbf {y}^{(k+1)}\) of (12) then is unique, and the approximate minimizer of \({{\mathcal {Q}}}^A(\mathbf {x},\mathbf {x}^{(k)})\) is given by (8).
We now enlarge the solution subspace \({\mathcal {V}}_k\) by including the normalized residual of the normal equations associated with (9). The residual is given by
and the columns of the matrix
form an orthonormal basis for the new solution subspace \({\mathcal V}_{k+1}\). We would like to point out that the vector \(\mathbf {r}^{(k+1)}\) is proportional to the gradient of \({\mathcal Q}^A(\mathbf {x},\mathbf {x}^{(k)})\) restricted to \({{\mathcal {V}}}_k\) at \(\mathbf {x}=\mathbf {x}^{(k+1)}\). We refer to the solution subspace \({\mathcal V}_{k+1}=\mathrm{range}(V_{k+1})\) as a generalized Krylov subspace. Note that the computation of \(\mathbf {r}^{(k+1)}\) requires only one matrix-vector product with \(A^T\) and \(L^T\), since we can exploit the QR factorizations (11) and the relation (8) to avoid computing any other matrix-vector products with the matrices A and L. Moreover, we store and update the “skinny” matrices \(AV_k\) and \(LV_k\) at each iteration to reduce the computational cost. The initial space \({\mathcal {V}}_1\) is usually chosen to contain a few selected vectors and to be of small dimension. A common choice is \({\mathcal {V}}_1=\mathrm{span}\{A^T\mathbf {b}^\delta \}\), which implies that \({\widehat{k}}=k\). We will use this choice in the computed examples reported in Sect. 4.
Summarizing, each iteration of the adaptive approach requires one matrix-vector product evaluation with each one of the matrices A, L, \(A^T\), and \(L^T\), as well as the computation of economic QR factorizations of two tall and skinny matrices, whose column numbers increase by one with each iteration. The latter computations can be quite demanding if the matrices A and L are large and many iterations are required. The algorithm requires the storage of the three matrices \(V_k\), \(AV_k\), and \(LV_k\). In addition, storage of some representations of the matrices A and L is needed.
We turn to the fixed approach. The weight vectors are now given by (7), and we would like to solve the minimization problem
for \(\mathbf {x}^{(k+1)}\), where \(\eta =\mu \varepsilon ^{q-p}\). This problem can be expressed as
The solution \(\mathbf {y}^{(k+1)}\) of (14) yields the solution \(\mathbf {x}^{(k+1)}=V_k\mathbf {y}^{(k+1)}\) of (13).
Introduce the economic QR factorizations
Substituting these factorizations into (14), we obtain
Once we have computed \(\mathbf {y}^{(k+1)}\) and \(\mathbf {x}^{(k+1)}\), we enlarge the solution subspace by including the residual
of the normal equations associated with (13). Thus, let \(\mathbf {v}_{\mathrm{new}}=\mathbf {r}^{(k+1)}/\left\| \mathbf {r}^{(k+1)} \right\| _2\). Then the columns of the matrix \(V_{k+1}=[V_k,\mathbf {v}_{\mathrm{new}}]\) form an orthonormal basis for the solution subspace \({\mathcal {V}}_{k+1}\). We remark that the residual is proportional to the gradient of \({\mathcal {Q}}^F(\mathbf {x},\mathbf {x}^{(k)})\) restricted to \({{\mathcal {V}}}_k\) at \(\mathbf {x}=\mathbf {x}^{(k+1)}\).
Note that differently from (10), the least-squares problem (14) does not have a diagonal scaling matrix. We therefore may compute the QR factorizations of \(AV_{k+1}\) and \(LV_{k+1}\) by updating the QR factorizations of \(AV_{k}\) and \(LV_{k}\), respectively. This reduces the computational work and leads to that each new iteration with the fixed approach is cheaper than with the adaptive approach. Updating formulas for the QR factorization can be found in [13, 21].
Each iteration with the fixed approach requires one matrix-vector product evaluation with each one of the matrices A, L, \(A^T\), and \(L^T\), similarly as for the adaptive approach. Moreover the memory requirements of the fixed and adaptive approaches are essentially the same.
The memory requirement of both the adaptive and fixed approaches outlined grows linearly with the number of iterations. It follows that when the matrix A is large, the memory requirement may be substantial when many iterations are required to satisfy the stopping criterion. This could be a difficulty on computers with fairly little fast memory. Moreover, the arithmetic cost for computing QR factorizations in the adaptive approach and for updating QR factorizations in the fixed approach grows quadratically and linearly, respectively, with the number of iterations.
3 Parameter choice rules
This section discusses several approaches to determine a suitable value of the regularization parameter \(\mu \) in (2). The strategies considered in the literature for the choice of the regularization parameter when variational models, including Tikhonov regularization, are employed can be divided into three main classes:
-
(i)
Methods relying on the noise level, that either may be known or accurately estimated. A very popular approach belonging to this class is the Discrepancy Principle (DP).
-
(ii)
Methods that rely on different statistical and non-deterministic properties of the noise, such as its whiteness.
-
(iii)
Heuristic methods, which are typically only based on the knowledge of the data \(\mathbf {b}^\delta \), among which we mention Generalized Cross Validation (GCV) and the L-curve criterion.
A general discussion on heuristic methods is provided by Kindermann [22]. Further references are provided below. In what follows, we are going to review some of the approaches mentioned and their modifications when applied to the solution of (2). Specifically, we are considering stationary and non-stationary scenarios: in the former, the methods are employed a posteriori, i.e., the minimization problem in (2) is solved for different \(\mu \)-values, and the optimal value, \(\mu ^*\), is selected based on a chosen strategy. In the latter scenario, the chosen strategy is applied during the iterations of the generalized Krylov method; therefore the optimization problem (2) is solved only once.
We remark that the formulation of the stationary strategies discussed in Sect. 3.1 does not depend on the selected algorithmic scheme. When considering the non-stationary rules presented in Sect. 3.2, several issues should be considered, such as the existence of a fast parameter update and the convergence of the overall iterative procedure. In this review, we focus on the robustness of the considered approaches when embedded in the iterations of the generalized Krylov method, and leave a rigorous analysis of the mentioned issues to a future study.
3.1 Stationary rules
We describe the stationary rules considered in this paper.
3.1.1 Discrepancy principle
Let the noise that corrupts the data be Gaussian. Then we set \(p=2\). Let \(\mathbf {x}_\mu \) denote the solution of (2) with \(p=2\), i.e.,
Assume that a fairly accurate estimate \(\delta >0\) of the norm of the noise is available
The discrepancy principle (DP) prescribes that the parameter \(\mu \) be chosen such that
where \(\tau >1\) is a user-defined constant that is independent of \(\delta \).
A non-stationary strategy to estimate \(\mu _{\mathrm{DP}}\) is described in [9], and we will discuss it in Sect. 3.2.1. Here we propose a stationary way to determine an estimate of the DP parameter. Extensive numerical experience shows that the computation of \(\mathbf {x}_\mu \) is fairly stable with respect to the choice of \(\mu \) and, therefore, a rough estimate of \(\mu _{\mathrm{DP}}\) is usually enough to compute a satisfactory solution.
The analysis of the DP requires that \(\mathbf {b}\in {\mathcal {R}}(A)\); see, e.g., [14]. Then \(\mu _{\mathrm{DP}}\) is well defined, since
Define the function \(r(\mu )=\left\| A\mathbf {x}_\mu -\mathbf {b}^\delta \right\| _2-\tau \delta \) and assume that \(r(\mu )\) is continuous. This assumption is satisfied for \(q=2\), see, e.g., [14], but to the best of our knowledge a proof for general q is not currently available. We may employ a root-finder to determine \(\mu _{\mathrm{DP}}\); see, e.g., [7, 31].
3.1.2 Residual whiteness principle
The whiteness property of the corrupting noise in linear inverse problems of the form (1) has been extensively explored in the context of variational methods. It is convenient to apply the whiteness property since it does not require knowledge of the standard deviation of the noise. Moreover, as it will be made clear in the following, it exploits more information of the data vector \(\mathbf {b}^\delta \) than the DP.
The whiteness property has been incorporated in variational models for image denoising and deblurring problems in [3, 24,25,26, 32]. Despite the high-quality results achieved in these works, these approaches suffer from the strong non-convexity of the variational models that have to be solved. This makes minimization a very hard task. Other approaches that exploit that the residual image is expected to model white Gaussian noise are described in [18, 33] and [1], where the authors propose two statistically-motivated parameter choice procedures based on the maximization of the residual whiteness by the normalized cumulative periodogram and the normalized auto-correlation, respectively. The approach introduced in [1] and applied as an a posteriori parameter choice criterion for image deconvolution problems has been revisited in [27, 30]. There the authors propose to automatically update the regularization parameter during the iterations of the algorithm used for the minimization of a wide class of convex variational models for image restoration and super-resolution problems.
In what follows, we recall the main steps of the a posteriori criterion described in [1, 27] and referred to as the Residual Whiteness Principle (RWP). We remark that, although the RWP has been originally designed for Gaussian noise corruption, it can been applied whenever the noise \(\varvec{\eta }\) in \(\mathbf {b}^\delta \) has independent and identically distributed entries.
Consider the noise realization \(\varvec{\eta } \in {{\mathbb {R}}}^m\) in (1) represented in its original \(m_1\times m_2\) form. Thus,
The sample auto-correlation of \(\varvec{\eta }\) is defined as
with \({\Theta } \;{:=}\; \{ -(m_1 -1) , \,\ldots \, , m_1 - 1 \} \times \{ -(m_2 -1),\,\ldots \, ,m_2-1\}\). The scalar components \(a_{l,k}(\varvec{\eta })\) are given by
where the integer pairs (l, k) are referred to as lags, \(\,\star \,\) and \(\,*\,\) denote the 2D discrete correlation and convolution operators, respectively, and \(\varvec{\eta }^{\prime }(i,j) = \varvec{\eta }(-i,-j)\).
Clearly, for (16) to be defined for all lags \((l,k) \in {\Theta }\), the noise realization \(\varvec{\eta }\) must be padded with at least \(m_1-1\) samples in the vertical direction and \(m_2-1\) samples in the horizontal direction. We will assume periodic boundary conditions for \(\varvec{\eta }\), so that \(\,\star \,\) and \(\,*\,\) in (16) denote 2D circular correlation and convolution, respectively. Then the auto-correlation has some symmetries that allow us to only consider the lags
If the error \(\varvec{\eta }\) in (1) is the realization of a white noise process, then it is well known that the sample auto-correlation \(a(\varvec{\eta })\) satisfies the asymptotic property:
We note that the discrepancy principle relies on exploiting only the lag (0, 0) -- among the m asymptotic properties of the noise auto-correlation given in (17). Imposing whiteness of the residual image of the restoration by constraining the residual auto-correlation at non-zero lags to be small is a much stronger requirement.
The whiteness principle can be made independent of the noise level by considering the normalized sample auto-correlation of the noise realization \(\varvec{\eta }\) in (15), namely
where \(\Vert \varvec{\eta }\Vert _F\) denotes the Frobenius norm of the matrix \(\varvec{\eta }\). It follows easily from (17) that
We introduce the following \(\sigma \)-independent non-negative scalar measure of whiteness \({\mathcal {W}}: {{\mathbb {R}}}^{m_1 \times m_2} \rightarrow {{\mathbb {R}}}^+\) of the noise realization \(\varvec{\eta }\):
Clearly, the nearer the restored image \(\mathbf {x}_\mu \) in (2) is to the target uncorrupted image \(\mathbf {x}^\dagger \), the closer the associated \(m_1\times m_2\) residual image obtained from \({\varvec{d}}_\mu = A \mathbf {x}_\mu - \mathbf {b}^\delta \) is to the white noise realization \(\varvec{\eta }\) in (1) and, hence, the whiter is the residual image according to the scalar measure in (18). The RWP for automatically selecting the regularization parameter \(\mu \) in variational models of the general form (2) therefore can be formulated as
where the scalar cost function W is defined by
We refer to W as the residual whiteness function.
3.1.3 Cross validation
Two heuristic approaches to determine a suitable value of the regularization parameter \(\mu \) in (2) for any positive values of p and q based on cross validation (CV) are described in [10]. This and the following subsections reviews these methods. For details on CV, we refer to [35].
Let \(1\le d\ll m\) and choose d distinct random integers \(i_1,\ldots ,i_d\) in \(\{1,\ldots ,m\}\). Remove rows \(i_1,\ldots ,i_d\) from A and \(\mathbf {b}^\delta \). This gives the “reduced” matrix and data vector \({\widetilde{A}}\in {{\mathbb {R}}}^{(m-d)\times n}\) and \({\widetilde{\mathbf {b}^\delta }}\in {{\mathbb {R}}}^{m-d}\), respectively. Consider a set \(\{\mu _1,\ldots ,\mu _l\}\) of positive parameter values. For each \(\mu _j\), we solve
Our aim is to determine the parameter \(\mu _j\) that yields a solution that predicts the values \(\mathbf {b}^\delta _{i_1},\ldots ,\mathbf {b}^\delta _{i_d}\) well. Therefore, we compute for each j the residual error
and let
Define \(\mu ^*=\mu _{j^*}\). To reduce variability, this process is repeated K times, producing K (possibly different) values \(\mu ^*_1,\ldots ,\mu _K^*\). The computed approximation of \(\mathbf {x}^\dagger \) is obtained as
with
3.1.4 Modified cross validation
Cross validation can be applied to predict entries of the computed solution instead of entries of the data vector \(\mathbf {b}^\delta \). This is described in [10] and there referred to as Modified Cross Validation (MCV). We outline this approach. The idea is to determine a value of \(\mu \) such that the computed solution is stable with respect to loss of data. Let \(1\le d\ll m\) and select two sets of d distinct indices between 1 and m referred to as \(I_1=\{i^{(1)}_1,i^{(1)}_2,\ldots ,i^{(1)}_d\}\) and \(I_2=\{i^{(2)}_1,i^{(2)}_2,\ldots ,i^{(2)}_d\}\). Let \({\widetilde{A}}_1\) and \({\widetilde{\mathbf {b}^\delta }}_1\), and \({\widetilde{A}}_2\) and \({\widetilde{\mathbf {b}^\delta }}_2\), denote the matrices and data vectors obtained by removing the rows with indexes \(I_1\) and \(I_2\) from A and \(\mathbf {b}^\delta \), respectively. Let \(\{\mu _1,\ldots ,\mu _l\}\) be a set of regularization parameters and solve
We then compute the quantities
evaluate
and define \(\mu ^*=\mu _{j^*}\). To reduce variability, the computations are repeated K times. This results in K values of \(\mu ^*\), which we denote by \(\mu _1^*,\ldots ,\mu _K^*\). The computed approximation of \(\mathbf {x}^\dagger \) is given by
with
3.2 Non-stationary rules
We now describe a few non-stationary rules for determining the regularization parameter.
3.2.1 Discrepancy principle
An iterative, nonstationary, approach to determine the regularization parameter \(\mu \) for the minimization problem (2) when \(p=2\) and the error \(\varvec{\eta }\) in \(\mathbf {b}^\delta \) is white Gaussian is described in [9]. We review this method for the fixed approach described at the end of Sect. 2. Our discussion easily can be extended to the adaptive case.
Formula (14) for \(p=2\) simplifies to
Substituting QR factorizations of \(AV_k\) and \(LV_k\) into the above equation and allowing \(\rho \) to change in each iteration, we obtain
We determine the parameter \(\rho ^{(k)}\) in each iteration so that
The above is a nonlinear equation in \(\rho ^{(k)}\). After having computed the GSVD of the matrix pair \(\{R_A,R_L\}\), this equation can be solved efficiently using a zero-finder; see [7, 31] for discussions. Here we just mention that the computation of the GSVD, even though it has to be done in each iteration, is not computationally expensive since the sizes of the matrices \(R_A\) an \(R_L\) are typically fairly small.
Since we compute the regularization parameter in each iteration, the method is non-stationary. We summarize the iterations as follows:
-
1.
Compute the weight \(\varvec{\omega }_{\mathrm{reg}}^{F,(k)}\);
-
2.
Solve (21) for \(\rho ^{(k)}\);
-
3.
Compute \(\mathbf {y}^{(k+1)}\) in (20);
-
4.
Expand the solution subspace by computing the residual of the normal equation and update the QR factorizations; see Sect. 2.
We carry out the iterations until two consecutive iterates are close enough, i.e., until
for some \(\gamma >0\).
We state the two main results of an analysis of this method provided in [9].
Theorem 1
([9]) Let A be of full column rank and let \(\mathbf {x}^{(k)}\) denote the iterates generated by the algorithm described above. Then there exists a convergent subsequence \(\{\mathbf {x}^{(k_j)}\}\) whose limit \(\mathbf {x}^*\) satisfies
Theorem 2
([9]) Let A be of full column rank and let \(\mathbf {x}^\delta \) denote the limit (possibly of a subsequence) of the iterates generated by the method described above with data vector \(\mathbf {b}^\delta \) such that
Then
3.2.2 Residual whiteness principle
The iterated version of the RWP outlined in Sect. 3.1.2 was proposed in [27] for convex variational models, which can be solved by the Alternating Direction Method of Multipliers (ADMM). The approach described in [27] for the situation when the noise \(\varvec{\eta }\) is white Gaussian relies on the following steps:
-
1.
Find an explicit expression of the residual whiteness function W defined in (19) in terms of \(\mu \) for a general \(\ell _2\)-\(\ell _2\) variational model.
-
2.
Exploit this expression of W as a function of \(\mu \) to automatically update the regularization parameter \(\mu \) in the \(\ell _2\)-\(\ell _2\) subproblem arising when employing ADMM using a suitable variable splitting.
The iterative procedure proposed in [27] can not be directly applied to the generalized Krylov method considered here. However, to explore the potential of the RWP when applied during the iterations of a generalized Krylov scheme, one can minimize the residual whiteness measure in (19) at each iteration in a similar fashion as for the DP.
For simplicity let us consider the adaptive approach, and note that the extension to the fixed case is straightforward. At each iteration, we solve
Denote by
The iterated RWP thus reduces to finding the \(\mu \)-value by solving the minimization problem
with
The minimization problem (22) is solved by means of a Matlab optimization routine that relies on the existence of a closed form for \(\mathbf {y}_{\mu }\). Alternatively, one could compute \(\mathbf {y}_{\mu }\) on a grid of different \(\mu \)-values and compute the corresponding whiteness measure function. Nonetheless, we believe that the design of an efficient algorithmic procedure for tackling problem (22) is worth further investigation.
We remark that the outlined strategy defines a new non-stationary method, for which a convergence proof is not yet available.
3.2.3 Generalized cross validation
This subsection summarizes the approach presented in [11]. Similarly as above, we consider a non-stationary method for determining \(\mu \). This method can be applied to any kind of noise.
Let us first assume that the noise is Gaussian and recall Generalized Cross Validation (GCV) for Tikhonov regularization, i.e., when \(p=q=2\) in (2):
Define the functional
The regularization parameter determined by the GCV method is given by
When the GSVD of the matrix pair \(\{A,L\}\) is available, \(G(\mu )\) can be evaluated inexpensively. If the matrices A and L are large, then they can be reduced to smaller matrices by a Krylov-type method and the GCV method can be applied to the reduced problem so obtained; see [11] for more details. This is how we apply the GCV method in the methods of the present paper. Specifically, in the adaptive solution method, we have to solve the minimization problem (12), which is of the same form as (23). Therefore, one can use GCV to compute an appropriate value of \(\mu \). Since the matrices \(R_A\) and \(R_L\) are fairly small, it is possible to compute the GSVD quite cheaply. It follows that the parameter \(\mu _{\mathrm{GCV}}\) can be determined fairly inexpensively. Moreover, the projection into a generalized Krylov subspace accentuates the convexity of G, making minimization easier; see [15, 16] discussions.
We iterate the above approach similarly as we iterated the discrepancy principle, and compute the parameter \(\mu _{\mathrm{GCV}}\) in each iteration. This furnishes a non-stationary algorithm. In detail, consider the kth iteration with regularization parameter \(\mu ^{(k)}\),
Compute the GSVD of the matrix pair \(\{R_A,R_L\}\). It gives the factorizations
where \(\varSigma _A\) and \(\varSigma _L\) are diagonal matrices, the matrix X is nonsingular, and the matrices U and V have orthonormal columns. We would like to compute the minimizer of
where \({\widehat{\mathbf {b}}}=Q_A^T\left( W_{\mathrm{fid}}^{(k)}\right) ^{1/2}\mathbf {b}^\delta \) and \(\mathbf {y}_\mu =(R_A^TR_A+\mu R_ L^TR_L)^{-1}R_A^T{\widehat{\mathbf {b}}}\). Substituting the GSVD of \(\{R_A,R_L\}\) into (24), we get
Since \(\varSigma _A\) and \(\varSigma _L\) are diagonal matrices, the value of \(G(\mu )\) can be computed cheaply for any value of \(\mu \); see, e.g., [5] for a derivation. We let at each iteration
Note that, even though it does not appear explicitly in the formulas, the function G varies with k.
We now consider the case in which the noise is not Gaussian. Since, in the continuous setting, the value of \(\left\| A\mathbf {x}_\mu -\mathbf {b}^\delta \right\| _2\) is infinite when \(\mathbf {b}^\delta \) is corrupted by impulse noise, a smoothed version of GCV was proposed in [11]. Let \(\mathbf {b}^\delta _{\mathrm{smooth}}\) denote a smoothed version of \(\mathbf {b}^\delta \) obtained by convolving \(\mathbf {b}^\delta \) with a Gaussian kernel; see [11] for details. Consider the smoothed function
and the parameter \(\mu \) is determined by minimizing \(G_{\mathrm{smooth}}(\mu )\). The non-stationary \(\ell _p\)-\(\ell _q\) method in this case is obtained in a similar fashion as above. We therefore do not dwell on the details. In the following, we will refer to this method as the GCV method regardless of the type of noise, and use G for Gaussian noise and \(G_{\mathrm{smooth}}\) for non-Gaussian noise.
4 Numerical experiments
We compare the parameter choice rules described above when applied to some image deblurring problems. These problems can be modeled by a Fredholm integral equation of the first kind
where the function g represents the blurred image, k is a possibly smooth integral kernel with compact support, and f is the sharp image that we would like to recover. Since k has compact support and is smooth, the solution of (25) is an ill-posed problem. When the blur is spatially invariant, the integral Eq. (25) reduces to a convolution
The kernel k is often referred to as the Point Spread Function (PSF). After discretization we obtain a linear system of equation of the form (1). Since we only have access to a limited field of view (FOV), it is customary to make an assumption about the behavior of f outside the FOV, i.e., we impose boundary conditions to the problem; see [20] for more details on image deblurring.
We consider three different images and kinds of blur, and three different types of noise. Specifically, we regard the cameraman image (\(242\times 242\)) and blur it with a motion PSF, the boat image (\(222\times 222\)), which we blur with a PSF that simulates the effect of taking a picture while one’s hands are shaking, and the clock image (\(226\times 226\)) with a Gaussian PSF; see Fig. 1. We consider Gaussian noise, Laplace noise, and a mixture of impulse and Gaussian noise. In the first case, we scale the noise so that \(\left\| \varvec{\eta } \right\| _2=0.02\left\| \mathbf {b} \right\| _2\), the second case is obtained by setting \(\theta =1\) and \(\sigma =5\) in (3), and in the third case we first modify randomly \(20\%\) of the pixels of \(\mathbf {b}\) and then add white Gaussian noise so that \(\left\| \varvec{\eta } \right\| _2=0.01\left\| \mathbf {b} \right\| _2\). Following [6], we set \(p=2\) when the data is corrupted by Gaussian noise, \(p=1\) when the data is contaminated by Laplace noise, and \(p=0.8\) in the mixed noise case. We let L be a discretization of the gradient operator. Assume, for simplicity, that \(n=n_1^2\) and define the matrix
Then
where \(I_{n_1}\) denotes the \({n_1\times n_1}\) identity matrix and \(\otimes \) is the Kronecker product. Natural images typically have a sparse gradient. Therefore, we set \(q=0.1\).
We now briefly discuss the computational effort required by each parameter choice rule. The cost of the stationary methods depends on how many values of \(\mu \) and, for CV and MCV, on how many training and testing sets are considered. For DP and RWP we sample 15 values of \(\mu \), while for CV and MCV we consider 10 values of \(\mu \) and 10 different training sets. Therefore, DP and RWP require the MM algorithm to be run 15 time, while CV and MCV run the MM algorithm 101 and 201 times, respectively. The non-stationary methods require a single run, however, the regularization parameter \(\mu _k\) has to be tuned at each iteration. Therefore, the cost of a single run of a non-stationary method is, in general, more expensive that the cost of single run of a stationary method. Nevertheless, since the computation of the parameter \(\mu _k\) can be performed cheaply, thanks to the projection into the generalized Krylov subspace, the non-stationary methods are overall more computationally efficient than their stationary counterparts.
We compare the performances of the considered parameter choice rules in term of accuracy using the Relative Restoration Error (RRE), defined as
Table 1 displays values of the RRE. We report the optimal RRE as well, i.e., the RRE obtained by hand-tuning \(\mu \) to minimize the RRE. For each test image and noise type, the RRE value that is closest to the optimal one is reported in bold.
Since the DP only can be used for Gaussian noise, we cannot determine the DP parameter for Laplace and mixed noise, while the RWP can be used only for white noise. Table 1 shows the DP and RWP to usually provide very accurate reconstructions, that is the achieved RRE is very close to the optimal one. The limitation of the DP is that it requires a fairly accurate estimate of \(\left\| \varvec{\eta } \right\| _2\) to be known. However, due to the Bakushinskii veto [2], the DP method is the only one for which a complete theoretical analysis is possible.
The CV, MCV, and GCV methods can be applied to any type of noise; however, being so-called heuristic methods, they may fail in certain situations. Table 1 indicates that the MCV tends to select a \(\mu \)-value that in some cases leads to significantly large RREs. The same behavior can be observed for the other CV-based strategies in the mixed noise case. Nonetheless, in general the CV algorithm provides the most consistent results.
For the strategies that admit both stationary and non-stationary formulations, the DP for Gaussian noise and the RWP for Gaussian and Laplace noises, we observe that for the two scenarios the corresponding RRE are very close, suggesting that the computed restorations are very similar. This behavior, which can be rigorously justified when the DP is used, provides empirical evidences of the robustness of the RWP.
We report in Fig. 2 the reconstructions obtained with the optimal choice of the parameter \(\mu \) in all considered cases. Note that, if the parameter \(\mu \) is chosen properly, then \(\ell ^p\)-\(\ell ^q\) minimization is able to determine very accurate reconstructions.

Test images considered. Cameraman test example: a true image (\(242\times 242\) pixels), d PSF (\(7\times 7\) pixels), g blurred image with \(2\%\) of white Gaussian noise, j blurred image with Laplace noise with \(\sigma =5\), m blurred image with \(20\%\) of impulse noise and \(1\%\) of white Gaussian noise. Boat test example: b true image (\(222\times 222\) pixels), e PSF (\(17\times 17\) pixels), h blurred image with \(2\%\) of white Gaussian noise, k blurred image with Laplace noise with \(\sigma =5\), n blurred image with \(20\%\) of impulse noise and \(1\%\) of white Gaussian noise. Clock test example: c true image (\(226\times 226\) pixels), f PSF (\(15\times 15\) pixels), i blurred image with \(2\%\) of white Gaussian noise, k blurred image with Laplace noise with \(\sigma =5\), o blurred image with \(20\%\) of impulse noise and \(1\%\) of white Gaussian noise

Recovered images with optimal choice of the parameter \(\mu \). Cameraman test example: a \(2\%\) of white Gaussian noise, d Laplace noise with \(\sigma =5\), g \(20\%\) of impulse noise and \(1\%\) of white Gaussian noise. Boat test example: b \(2\%\) of white Gaussian noise, e Laplace noise with \(\sigma =5\), h \(20\%\) of impulse noise and \(1\%\) of white Gaussian noise. Clock test example: c \(2\%\) of white Gaussian noise, f Laplace noise with \(\sigma =5\), i \(20\%\) of impulse noise and \(1\%\) of white Gaussian noise. All the images are projected into \([0,255]^n\)
5 Conclusions
This paper compares a few parameter choice rules for the \(\ell ^p\)-\(\ell ^q\) minimization method. Their pros and cons are discussed and their performances are illustrated. We have shown that, if the regularization parameter is tuned carefully, then the \(\ell _p\)-\(\ell _q\) model, solved by means of the generalized Krylov method, can provide very accurate reconstructions. The RWP, which here has been applied with the \(\ell _p\)-\(\ell _q\) model for the first time, can be seen to be particularly robust and is able to determine restorations of high quality.
References
Almeida, M., Figueiredo, M.: Parameter estimation for blind and non-blind deblurring using residual whiteness measures. IEEE Trans. Image Process. 22, 2751–2763 (2013)
Bakushinskii, A.: Remarks on choosing a regularization parameter using the quasi-optimality and ratio criterion. USSR Comput. Math. Math. Phys. 24(4), 181–182 (1984)
Baloch, G., Ozkaramanli, H., Yu, R.: Residual correlation regularization based image denoising. IEEE Signal Process. Lett. 25, 298–302 (2018)
Bianchi, D., Buccini, A., Donatelli, M., Randazzo, E.: Graph Laplacian for image deblurring. Electron. Trans. Numer. Anal. 55, 169–186 (2021)
Buccini, A.: Generalized cross validation stopping rule for iterated tikhonov regularization. In: 2021 21st International Conference on Computational Science and Its Applications (ICCSA), pp. 1–9. IEEE (2021)
Buccini, A., De la Cruz Cabrera, O., Donatelli, M., Martinelli, A., Reichel, L.: Large-scale regression with non-convex loss and penalty. Appl. Numer. Math. 157, 590–601 (2020)
Buccini, A., Pasha, M., Reichel, L.: Generalized singular value decomposition with iterated Tikhonov regularization. J. Comput. Appl. Math. 373, 112,276 (2020)
Buccini, A., Pasha, M., Reichel, L.: Modulus-based iterative methods for constrained \(\ell ^p\)-\(\ell ^q\) minimization. Inverse Prob. 36(8), 084,001 (2020)
Buccini, A., Reichel, L.: An \(\ell ^2\)-\(\ell ^q\) regularization method for large discrete ill-posed problems. J. Sci. Comput. 78, 1526–1549 (2019)
Buccini, A., Reichel, L.: An \(\ell ^p\)-\(\ell ^q\) minimization method with cross-validation for the restoration of impulse noise contaminated images. J. Comput. Appl. Math. 375, 112,824 (2020)
Buccini, A., Reichel, L.: Generalized cross validation for \(\ell ^p\)-\(\ell ^q\) minimization. Numer. Algorithms 88, 1595–1616 (2021)
Chan, R.H., Liang, H.X.: Half-quadratic algorithm for \(\ell _p\)-\(\ell _q\) problems with applications to TV-\(\ell _1\) image restoration and compressive sensing. In: Efficient Algorithms for Global Optimization Methods in Computer Vision, pp. 78–103. Springer, New York (2014)
Daniel, J.W., Gragg, W.B., Kaufman, L., Stewart, G.W.: Reorthogonalization and stable algorithms for updating the Gram-Schmidt QR factorization. Math. Comput. 30(136), 772–795 (1976)
Engl, H.W., Hanke, M., Neubauer, A.: Regularization of Inverse Problems. Kluwer, Doordrecht (1996)
Fenu, C., Reichel, L., Rodriguez, G.: GCV for Tikhonov regularization via global Golub-Kahan decomposition. Numer. Linear Algebra Appl. 23(3), 467–484 (2016)
Fenu, C., Reichel, L., Rodriguez, G., Sadok, H.: GCV for Tikhonov regularization by partial SVD. BIT Numer. Math. 57(4), 1019–1039 (2017)
Galligani, I.: Optimal numerical methods for direct and inverse problems in hydrology. Simulation 38(1), 20–22 (1982)
Hansen, P., Kilmer, M., Kjeldsen, R.: Exploiting residual information in the parameter choice for discrete ill-posed problems. BIT Numer. Math. 46, 41–59 (2006)
Hansen, P.C.: Rank-Deficient and Discrete Ill-Posed Problems: Numerical Aspects of Linear Inversion. SIAM, Philadelphia (1998)
Hansen, P.C., Nagy, J.G., O’Leary, D.P.: Deblurring Images: Matrices, Spectra, and Filtering. SIAM, Philadelphia (2006)
Huang, G., Lanza, A., Morigi, S., Reichel, L., Sgallari, F.: Majorization-minimization generalized Krylov subspace methods for \(\ell _p\)-\(\ell _q\) optimization applied to image restoration. BIT Numer. Math. 57, 351–378 (2017)
Kindermann, S.: Convergence analysis of minimization-based noise level-free parameter choice rules for linear ill-posed problems. Electron. Trans. Numer. Anal. 38, 233–257 (2011)
Lanza, A., Morigi, S., Reichel, L., Sgallari, F.: A generalized Krylov subspace method for \(\ell _p\)-\(\ell _q\) minimization. SIAM J. Sci. Comput. 37, S30–S50 (2015)
Lanza, A., Morigi, S., Sciacchitano, F., Sgallari, F.: Whiteness constraints in a unified variational framework for image restoration. J. Math. Imag. Vis. 60, 1503–1526 (2018)
Lanza, A., Morigi, S., Sgallari, F.: Variational image restoration with constraints on noise whiteness. J. Math. Imag. Vis. 53, 61–67 (2015)
Lanza, A., Morigi, S., Sgallari, F., Yezzi, A.: Variational image denoising based on autocorrelation whiteness. SIAM J. Imag. Sci. 6, 1931–1955 (2013)
Lanza, A., Pragliola, M., Sgallari, F.: Residual whiteness principle for parameter-free image restoration. Electron. Trans. Numer. Anal. 53, 329–351 (2020)
Lanza, A., Pragliola, M., Sgallari, F.: Automatic fidelity and regularization terms selection in variational image restoration. BIT Numerical Mathematics (2021)
Louis, A.K.: Medical imaging: State of the art and future development. Inverse Prob. 8(5), 709–738 (1992)
Pragliola, M., Calatroni, L., Lanza, A., Sgallari, F.: ADMM-based residual whiteness principle for automatic parameter selection in super-resolution problems (2021). arXiv:2108.13091
Reichel, L., Shyshkov, A.: A new zero-finder for Tikhonov regularization. BIT Numer. Math. 48, 627–643 (2008)
Riot, P., Almansa, A., Gousseau, Y., Tupin, F.: Penalizing local correlations in the residual improves image denoising performance. In: 24th European Signal Processing Conference (EUSIPCO 2016), pp. 1867–1871 (2016)
Rust, B.W., O’Leary, D.P.: Residual periodograms for choosing regularization parameters for ill-posed problems. Inverse Prob. 24, 034,005 (2008)
Snieder, R., Trampert, J.: Inverse problems in geophysics. In: Wirgin, A. (ed.) Wavefield Inversion, pp. 119–190. Springer, Vienna (1999)
Stone, M.: Cross-validatory choice and assessment of statistical prediction. J. R. Stat. Soc. B 36, 111–147 (1977)
Acknowledgements
A.B., M.P., and F.S. are members of the GNCS-INdAM group.
Funding
Open access funding provided by Università degli Studi di Napoli Federico II within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Buccini, A., Pragliola, M., Reichel, L. et al. A comparison of parameter choice rules for \(\ell ^p\)-\(\ell ^q\) minimization. Ann Univ Ferrara 68, 441–463 (2022). https://doi.org/10.1007/s11565-022-00430-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11565-022-00430-9