
Abstract
This paper proposes a divergence-free smoothing (DFS) method for the post-process of volumetric particle image velocimetry (PIV) data, which can smooth out noise and divergence error at the same time. The method is a combination of the penalized least squares regression and the divergence corrective scheme (DCS), employing the generalized cross-validation method to automatically determine the best smoothing parameter. By introducing a weight-changing algorithm similar to the all-in-one method, a robust version of DFS can simultaneously deal with vector validation, replacement of outliers and missing vectors, smoothing, and zero-divergence correction of the velocity field. Direct numerical simulation data of turbulent channel flow (Johns Hopkins Turbulence Databases) added with artificial noise, outliers and missing vectors are used to test the accuracy of DFS. The results show that DFS can smooth the velocity field to divergence-free and performs better than the all-in-one method, DCS and some other available conventional processing methods for post-process of velocity field, especially in dealing with clustered outliers and missing vectors. A block DFS is suggested to process large velocity field to save both time and memory. Tests on tomographic PIV data validate the effectiveness of DFS on improving both flow statistics and flow visualization.

















Similar content being viewed by others
References
Adrian RJ, Westerweel J (2011) Particle image velocimetry, vol 30. Cambridge University Press, Cambridge
Atkinson C, Coudert S, Foucaut JM, Stanislas M, Soria J (2011) The accuracy of tomographic particle image velocimetry for measurements of a turbulent boundary layer. Exp Fluids 50(4):1031–1056
Borrell G, Sillero JA, Jiménez J (2013) A code for direct numerical simulation of turbulent boundary layers at high reynolds numbers in BG/P supercomputers. Comput Fluids 80(7):3743
Buckley M (1994) Fast computation of a discretized thin-plate smoothing spline for image data. Biometrika 81(2):247–258
Coleman D, Holland P, Kaden N, Klema V, Peters SC (1980) A system of subroutines for iteratively reweighted least squares computations. ACM Trans Math Softw (TOMS) 6(3):327–336
Craven P, Wahba G (1978) Smoothing noisy data with spline functions. Numer Math 31(4):377–403
de Kat R, van Oudheusden BW (2012) Instantaneous planar pressure determination from PIV in turbulent flow. Exp Fluids 52(5):1089–1106
de Silva CM, Philip J, Marusic I (2013) Minimization of divergence error in volumetric velocity measurements and implications for turbulence statistics. Exp fluids 54(7):1–17
Elsinga GE, Scarano F, Wieneke B, van Oudheusden BW (2006) Tomographic particle image velocimetry. Exp Fluids 41(6):933–947
Elsinga GE, Westerweel J, Scarano F, Novara M (2011) On the velocity of ghost particles and the bias errors in tomographic-PIV. Exp Fluids 50(4):825–838
Foucaut JM, Carlier J, Stanislas M (2004) PIV optimization for the study of turbulent flow using spectral analysis. Meas Sci Technol 15(6):1046–1058
Gao Q (2011) Evolution of eddies and packets in turbulent boundary layers. PhD thesis, University of Minnesota
Garcia D (2010) Robust smoothing of gridded data in one and higher dimensions with missing values. Comput Stat Data Anal 54(4):1167–1178
Garcia D (2011) A fast all-in-one method for automated post-processing of PIV data. Exp Fluids 50(5):1247–1259
Graham J, Lee M, Malaya N, Moser R, Eyink G, Meneveau C, Kanov K, Burns R, Szalay A (2013) Turbulent channel flow data set. http://turbulence.pha.jhu.edu/docs/README-CHANNEL.pdf
Gunes H, Rist U (2007) Spatial resolution enhancement/smoothing of stereo–particle-image-velocimetry data using proper-orthogonal-decomposition-based and kriging interpolation methods. Phys Fluids (1994-present) 19(6):064,101
Gunes H, Sirisup S, Karniadakis GE (2006) Gappy data: To krig or not to krig? J Comput Phys 212(1):358–382
Heiberger RM, Becker RA (1992) Design of an s function for robust regression using iteratively reweighted least squares. J Comput Graph Stat 1(3):181–196
Holland PW, Welsch RE (1977) Robust regression using iteratively reweighted least-squares. Commun Stat Theory Methods 6(9):813–827
Hunt JCR, Wray AA, Moin P (1988) Eddies, streams, and convergence zones in turbulent flows. Stud Turbul Using Numer Simul Databases 2:193–208
Kendall A, Koochesfahani M (2008) A method for estimating wall friction in turbulent wall-bounded flows. Exp Fluids 44(5):773–780
Li Y, Perlman E, Wan M, Yang Y, Meneveau C, Burns R, Chen S, Szalay A, Eyink G (2008) A public turbulence database cluster and applications to study lagrangian evolution of velocity increments in turbulence. J Turbul 9:N31
Liang D, Jiang C, Li Y (2003) Cellular neural network to detect spurious vectors in PIV data. Exp Fluids 34(1):52–62
Lophaven SN, Nielsen HB, Søndergaard J (2002) Dace—a matlab kriging toolbox, version 2.0. Technical report
Murray NE, Ukeiley LS (2007) An application of gappy pod. Exp Fluids 42(1):79–91
Nogueira J, Lecuona A, Rodriguez P (1997) Data validation, false vectors correction and derived magnitudes calculation on PIV data. Meas Sci Technol 8(12):1493
Perlman E, Burns R, Li Y, Meneveau C (2007) Data exploration of turbulence simulations using a database cluster. In: Proceedings of the 2007 ACM/IEEE conference on supercomputing, ACM
Raben SG, Charonko JJ, Vlachos PP (2012) Adaptive gappy proper orthogonal decomposition for particle image velocimetry data reconstruction. Meas Sci Technol 23(2):025,303
Raffel M, Willert CE, Wereley S, Kompenhans J (2007) Particle image velocimetry: a practical guide. Springer, Berlin, Heidelberg
Sadati M, Luap C, Kröger M, Öttinger HC (2011) Hard vs soft constraints in the full field reconstruction of incompressible flow kinematics from noisy scattered velocimetry data. J Rheol (1978-present) 55(6):1187–1203
Schiavazzi D, Coletti F, Iaccarino G, Eaton JK (2014) A matching pursuit approach to solenoidal filtering of three-dimensional velocity measurements. J Comput Phys 263:206–221
Schrijer FFJ, Scarano F (2008) Effect of predictor–corrector filtering on the stability and spatial resolution of iterative PIV interrogation. Exp Fluids 45(5):927–941 (15)
Shinneeb A, Bugg J, Balachandar R (2004) Variable threshold outlier identification in PIV data. Meas Sci Technol 15(9):1722
Sillero JA, Jiménez J, Moser RD (2013) One-point statistics for turbulent wall-bounded flows at reynolds numbers up to δ+≈ 2000. Phys Fluids (1994–present) 25(10):105102
Simens MP, Jiménez J, Hoyas S, Mizuno Y (2009) A high-resolution code for turbulent boundary layers. J Comput Phys 228:42184231
Song X, Yamamoto F, Iguchi M, Murai Y (1999) A new tracking algorithm of PIV and removal of spurious vectors using delaunay tessellation. Exp Fluids 26(4):371–380
Wahba G (1990) Spline models for observational data, vol 59. SIAM, Philadelphia
Wang C, Gao ZH, Huang JT, Zhao K, Jing LI (2015a) Smoothing methods based on coordinate transformation in a linear space and application in airfoil aerodynamic design optimization. Sci China Technol Sci 58(2):297–306
Wang H, Gao Q, Feng L, Wei R, Wang J (2015b) Proper orthogonal decomposition based outlier correction for PIV data. Exp Fluids 56(2):1–15
Weinert HL (2007) Efficient computation for Whittaker–Henderson smoothing. Comput Stat Data Anal 52(2):959–974
Westerweel J (1994) Efficient detection of spurious vectors in particle image velocimetry data. Exp Fluids 16(3–4):236–247
Westerweel J, Scarano F (2005) Universal outlier detection for PIV data. Exp Fluids 39(6):1096–1100
Yang G, Kilner P, Firmin D, Underwood S, Burger P, Longmore D (1993) 3D cine velocity reconstruction using the method of convex projections. In: Proceedings IEEE conference on computers and cardiology, pp 361–364
Young C, Johnson D, Weckman E (2004) A model-based validation framework for PIV and PTV. Exp Fluids 36(1):23–35
Acknowledgments
This work is supported by the National Natural Science Foundation of China (11472030, 11327202, 11490552). We would like to thank Professor Charles Meneveau for providing the DNS data of turbulent channel flow. We would also like to thank Professor Sillero for providing the DNS data of turbulent boundary layer flow.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Specific forms of \({\textbf{A }}\) and \({\textbf{M}}\)
Assume that the l-th (\(l=1, 2, 3\)) component of velocity at the position (i, j, k) is arranged as the \((i+(j-1)n_x+(k-1)n_xn_y+(l-1)n)\)-th element of \({\textbf{U }}_{\text {exp}}\) or \({\textbf{U }}_{\text {s}}\). Then corresponding divergence operator \({\textbf{A }}\) and \({\textbf{M}}\) are calculated by the Eqs. (39)–(42), noting that the symbol \(\otimes\) denotes the Kronecker product between two matrices.
where \({\textbf{I }}_{n_x}\), \({\textbf{I }}_{n_x}\) and \({\textbf{I }}_{n_z}\) are identical matrices and \({\textbf {D}}_{n_x}\), \({\textbf {D}}_{n_x}\) and \({\textbf {D}}_{n_z}\) take the following form
where \({\textbf{N}}_{n_x}\), \({\textbf{N}}_{n_x}\) and \({\textbf{N}}_{n_z}\) take the following form.
The Eq. (41) is a generalization of the work of Buckley (1994), who detailed the form of \({\textbf{M}}\) for the smoothing of two-dimensional scalar data.
Appendix 2: Numerical test for GCV
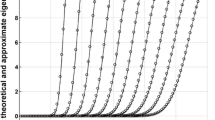
To validate the performance of the GCV method on estimating smoothing parameter, a test based on 100 DNS velocity fields with different noise levels is performed to get the average results. Details of the testing DNS data and the added artificial noise are introduced in Sect. 3, where more tests of DFS are performed on the same DNS data. To find the best smoothing parameter s directly in this test, DFS using different value of s (from 0.02 to 1) is scanned to smooth the noisy velocity field, with which the estimation of s by GCV method is compared. The relative smoothing error is defined as the norm of the difference between the DFS-processed field and the original DNS field, normalized by the norm of the original DNS field with the free-stream velocity subtracted [Eq. (36) in Sect. 3.1]. Errors of DFS using different s to smooth velocity field with different noise levels are contoured in Fig. 18. The best s marked in Fig. 18 is acquired by finding the result with the smallest smoothing error under the corresponding noise level. The estimations of s by GCV are also marked in the figure for comparison. It shows that GCV method always choose a decent smoothing parameter, which is very close to the best DFS results at different noise levels. In fact, the differences between the smoothing errors resulting from GCV estimation and the ones using the best s are always less than 0.1 %. It suggests that the GCV method is a good adaptive method for different noise levels. Another interesting result is that the optimal smoothing parameter s is proportional to the noise level. Therefore, it seems possible to estimate the noise level of the experimental data according to the GCV estimation of smoothing parameter s.
Besides the theoretical proof (Craven and Wahba 1978) and the above numerical test, the GCV method, as a general method, has been successfully applied in the DCT-PLS method on dealing with various types of experimental errors (Garcia 2010). In current work, we also perform a systematical test of DFS on all possible errors of PIV data in the following Sects. 3–5. The good performances of both DCT-PLS and DFS in practical application strongly evidence that the GCV method is an effective and robust algorithm in choosing the smoothing parameter.
At last, it is worth to note that any smoothing operation has certain low-pass filtering effect for the flow field. For DFS, larger smoothing parameter means stronger noise-reduce effect and, therefore, larger range of frequency truncation. DFS seeks a good balance between the two effects of noise reduction and spatial attenuation by using the GCV method.

Test of GCV method. The contours indicate the relative smoothing error. Two curves with different markers stand for the best parameter s and the GCV-estimated s
Rights and permissions
About this article

Cite this article
Wang, C., Gao, Q., Wang, H. et al. Divergence-free smoothing for volumetric PIV data. Exp Fluids 57, 15 (2016). https://doi.org/10.1007/s00348-015-2097-1
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00348-015-2097-1