A mathematical framework to study fast walking of human Tara FarizehMohammad Jafar Sadigh OriginalPaper 29 December 2015 Pages: 99 - 122
Energy-efficacy comparisons and multibody dynamics analyses of legged robots with different closed-loop mechanisms Kazuma KomodaHiroaki Wagatsuma OriginalPaper Open access 20 December 2016 Pages: 123 - 153
Generating 1-DOF limit cycle walking at target walking speed by feed-forward and feedback limit cycle control Xuan XiaoFumihiko Asano OriginalPaper 15 March 2017 Pages: 155 - 175
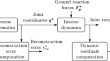
Uncertainty propagation in multibody human model dynamics Antoine MullerCharles PontonnierGeorges Dumont OriginalPaper 10 March 2017 Pages: 177 - 192
Individual muscle contributions to ground reaction and to joint contact, ligament and bone forces during normal gait F. MoissenetL. ChèzeR. Dumas OriginalPaper 09 February 2017 Pages: 193 - 211