Unified mechanism synthesis method of a planar four-bar linkage for path generation employing a spring-connected arbitrarily sized rectangular block model Bum Seok KimHong Hee Yoo OriginalPaper 21 May 2013 Pages: 241 - 256
Numerical construction of balanced state manifold for single-support legged mechanism in sagittal plane Joo H. KimChang B. Joo OriginalPaper 02 July 2013 Pages: 257 - 281
Two walking gaits for a planar bipedal robot equipped with a four-bar mechanism for the knee joint A. HamonY. AoustinS. Caro OriginalPaper 18 July 2013 Pages: 283 - 307
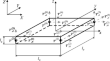
A study of moderately thick quadrilateral plate elements based on the absolute nodal coordinate formulation Marko K. MatikainenAntti I. ValkeapääA. L. Schwab OriginalPaper 27 August 2013 Pages: 309 - 338
Interpolation of rotation and motion Olivier A. BauchauShilei Han OriginalPaper 27 April 2013 Pages: 339 - 370
On the Gröbner basis triangularization of constraint equations in natural coordinates Thomas UchidaAlfonso CallejoJohn McPhee OriginalPaper 02 October 2013 Pages: 371 - 392