Field of safe travel in swarm Kohei SonodaHisashi MurakamiYukio-Pegio Gunji Special Feature: Original Article 12 September 2016 Pages: 379 - 383
Quadrupedal running with a flexible torso: control and speed transitions with sums-of-squares verification Qu CaoIoannis Poulakakis Special Feature: Original Article 17 November 2016 Pages: 384 - 392
Information seeking and model predictive control of a cooperative multi-robot system Shuhei EmotoIlge AkkayaEdward A. Lee Special Feature: Original Article 04 October 2016 Pages: 393 - 398
Gradual learning for behavior acquisition by evolving artificial neural network Ryosuke OoeTakashi Kawakami Special Feature: Original Article 14 September 2016 Pages: 399 - 404
Adaptive role assignment for self-organized flocking of a real robotic swarm Yasuda ToshiyukiShigehito NakataniKazuhiro Ohkura Special Feature: Original Article 31 October 2016 Pages: 405 - 410
Multi-objective optimization for efficient motion of underwater snake robots E. KelasidiM. JesmaniJ. T. Gravdahl Special Feature: Original Article 05 November 2016 Pages: 411 - 422
Particle swarm optimization with mutation operations controlled by landscape modality estimation using hill-valley detection Tetsuyuki TakahamaSetsuko SakaiAkira Hara Special Feature: Original Article 25 July 2016 Pages: 423 - 433
Deployment of wireless mesh network using RSSI-based swarm robots Kiyohiko HattoriNaoki TatebeKeiki Takadama Special Feature: Original Article 01 September 2016 Pages: 434 - 442
Aggregation in robot swarms using odometry Andrew Vardy Special Feature: Original Article 07 November 2016 Pages: 443 - 450
Generalized measuring-worm algorithm: high-accuracy mapping and movement via cooperating swarm robots Kiyohiko HattoriEri HommaKiyoshi Hamaguchi Special Feature: Original Article 01 September 2016 Pages: 451 - 459
Robophysical study of excavation in confined environments Vadim LinevichDaria MonaenkovaDaniel I. Goldman Special Feature: Original Article 20 October 2016 Pages: 460 - 465
An enhanced incremental association rule discovery with a lower minimum support Araya AriyaWorapoj Kreesuradej Original Article 19 July 2016 Pages: 466 - 477
Teleoperation of robot arm with position measurement via angle-pixel characteristic and visual supporting function Yoshitaka MatsudaTakenao SugiNaruto Egashira Original Article 13 July 2016 Pages: 478 - 485
Development of an embedded sensor system for pneumatic artificial muscle proprioceptors Hirofumi ShinHajime SaitohKoh Hosoda Original Article 26 July 2016 Pages: 486 - 492
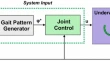
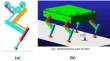
Multi-body dynamics simulation and gait pattern analysis of a bio-inspired quadruped robot for unstructured terrains using adaptive stroke length Dayalan VishalPudureddiyur Venkataraman Manivannan Original Article 03 August 2016 Pages: 493 - 499
A trajectory generation method for mobile robot based on iterative extension-like process Kuniaki Kawabata Original Article 28 July 2016 Pages: 500 - 509
Computer simulation of human–robot interaction through natural language Rojanee KhummongkolMasao Yokota Original Article 20 August 2016 Pages: 510 - 519
Guaranteed cost control of robot manipulator with prescribed degree of stability Nobuya TakahashiOsamu Sato Original Article 13 August 2016 Pages: 520 - 524
A study of real-time and 100 billion agents simulation using the Boids model Yuichi HirokawaNoriaki NishikawaTeruo Matsuzawa Original Article 16 August 2016 Pages: 525 - 530
A construction of five-state real-time Fibonacci sequence generator Naoki KamikawaHiroshi Umeo Original Article 14 October 2016 Pages: 531 - 539
A study about control for rolling objects and beam system Nobuya TakahashiOsamu SatoYohei Yamashita Original Article 13 September 2016 Pages: 540 - 544