
Abstract
This paper presents a short review for phase measuring deflectometry (PMD). PMD is a phase calculation based technique for three-dimensional (3D) measurement of specular surfaces. PMD can achieve nano-scale form measurement accuracy with the advantages of high dynamic range, non-contact, full field measurement which makes it a competitive method for specular surface measurement. With the development of computer science, display and imaging technology, there has been an advancement in speed for PMD in recent years. This paper discusses PMD focusing on the difference on its system configuration. Measurement principles, progress, advantages and problems are discussed for each category. The challenges and future development of PMD are also discussed.
Similar content being viewed by others


Introduction
Surface form measurement is important in engineering applications [1]. Fringe projection technologies are widely used for diffused surface form measurement [2,3,4]. For object surfaces which exhibit special properties, such as being specular and transparent, fringe projection methods cannot be implemented. For measuring transparent objects, Mériaudeau provides a brief on the latest advancements [5]. Measurement of 3D surface form of specular objects remains a challenge because of the reflecting properties of their surfaces. From all the existing technologies [6, 7], interferometry [8,9,10,11,12] and deflectometry [13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52] are the two competitive methods for specular object measurement because of their none-contact measurement nature and high measurement resolution. Interferometry is a superior technique for measuring simple surfaces such as spheres, planar surfaces, and weakly aspheric surfaces, but has difficulty in measuring complicated aspheric mirrors or free-form specular objects because a reference surface is required during measurement [8,9,10,11,12]. Phase measuring deflectometry (PMD) is a famous deflectometry technique that is based on phase calculation [23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49, 51, 52]. With the advancement of displaying, imaging and computing technologies, PMD becomes an effective three-dimensional (3D) form measurement method for specular surfaces. Compared with interferometry, PMD has many advantages such as having a high dynamic range, full field of view and non-null measurement. As an alternative technology for measuring surface form of specular objects, PMD has been studied by many researchers. Huang et al. [53] and Zhang et al. [54] reviewed history of PMD and key techniques applied in PMD. They also made a comparison with other measurement techniques, and discussed major challenges and application of PMD. In this short review we present the development of PMD with the advancement of related technologies and discuss challenges and further developments.
Advancements of PMD
PMD measures specular surfaces by utilising the reflective property of surfaces, which is very similar to Moire deflectometry [15,16,17,18]. PMD displays phase-shifting sinusoidal fringe patterns on displaying screens and captures the deformed reflected patterns through imaging sensors. Phase information is extracted from the deformed patterns to calculate the 3D shapes of surfaces under test (SUT). Due to the application of sinusoidal fringe patterns and phase techniques, PMD has a high dynamic range, and high measurement accuracy and solution compared to other deflectometry technologies [13,14,15,16,17,18,19,20,21,22]. According to system setup, PMD can be classified into the following three categories.
Single screen and sensor based PMD
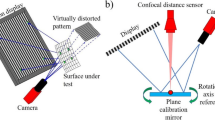
The single screen and sensor based PMD is illustrated in Fig. 1(a). A reference surface shown in red is assumed to be parallel to the displaying screen with a distance d. The camera ray is perpendicular to the screen and the reference. With known phase difference ∆φ between Q0 and Q1, the gradient of the measured surface can be obtained according to Eq. (1).
where p represents physical distance per fringe period. Several PMD systems have been developed based on this method. Häusler et al. introduced a microdeflectometry system to measure microscope features [23]. Liu et al. established a system with an illuminated photographic film for the measurement of small specular objects [24]. However, the measurement principle of this method is based on paraxial approximation, which means it can only measure objects with small size.

Illustration of PMD based on single screen and sensor. a Model based on paraxial approximation; b model based on flat reference; c model based on an estimated shape and positon of SUT
Compared with the strict geometry requirements of Fig. 1(a), a model with a flexible component arrangement is described in Fig. 1(b). Assuming the measured specular surface is very close to a reference with known positon, gradient of a surface point S can be obtained based on a triangular relationship composed of P, S and Q. Huang et al. developed a fast measurement PMD system based on this model [25]. Li et al. analysed the influence of position error of the reference plane and explored increasing the plane’s positional accuracy by applying two visible laser sources and a confocal white-light distance sensor [26]. However, PMD based on this model can only measure near-plane surfaces.
An advanced model shown in Fig. 1(c) is quite similar to that in Fig. 1(b) but can measure objects with high curvature change. Rough shape and positon of the measured surface is required to be estimated to replace the reference plane in Fig. 1(b). Objects with different surface properties were detected by Bothe et al. based on this model, such as metal surfaces, transparent plastic surfaces, glass, and water surfaces [27]. A software-configurable optical test system (SCOTS) is developed by Su et al. to measure telescope mirrors based on the advanced model [28]. The accuracy of the estimated rough surface directly affects the measurement accuracy of this model. Generally, a positon sensor such as a coordinate measuring machine (CMM) is used to estimate the rough surface. However, it is a challenge to combine the coordinate systems of the position sensor and PMD with high accuracy. Xu et al. studied a calibration method to obtain the rough surface with a manufacturing positioning system and establish the relationship between the manufacturing system and PMD measuring system directly [29, 30]. However, this calibration method is specially designed for in-situ measurement with PMD and still needs to be improved for off-line measurement.
Multi-screen based PMD
A simple model shown in Fig. 2(a) is used to describe the principles of PMD based on multiple screens [31,32,33,34,35]. Camera ray PS is reflected by surface point S and intersects two parallel screens at Q1, Q2. The normal of S can be calculated based on incident ray PS and reflected ray Q1Q2 with known camera imaging parameters and location of Q1 and Q2. Since Screen 1 blocks light from reaching Screen 2, a common solution is to move a screen vertically from one position to another during the measurement process. However, screen movement increases complexity of system structure and measurement time of the system. With the development of display techniques, Li et al. improved multi-screen based PMD by using a transparent screen [36]. The camera ray can pass through the transparent screen to a general displaying screen. The two screens can be fixed in a relatively free position in Li’s system.

Illustration of PMD based on multiple screens. a Model based on screen movement; b model of DPMD
Direct phase measuring deflectometry (DPMD) [37,38,39] is another type of multi-screen based PMD system, as shown in Fig. 2(b). Depth data of the measured surface can be obtained according to Eq. (2) with known phase values φ1, φ2, \( {\varphi}_1^{\prime } \) and \( {\varphi}_2^{\prime } \).
where d is the distance between Screen 1 and the reference, and ∆d is the distance between two parallel screens. The camera ray reflected by the reference intersects the screens at phase points φ1 and φ2. \( {\varphi}_1^{\prime } \) and \( {\varphi}_2^{\prime } \) are the intersections of the screens and the reflected camera ray through the measured surface. In an actual DPMD system, a beam splitter is applied to generate a virtual screen that is parallel to a real screen. However, it is different to guarantee an absolute parallel between the virtual screen and the real screen. Compared with PMD based on gradient integration, DPMD can measure discontinuous specular surfaces. However, its accuracy is not as good as PMD based on gradient integration for continuous specular surface measurement, since the measured surface cannot be reconstructed based on gradient information in DPMD.
Multi-sensor based PMD
Stereo deflectometry is a PMD technique based on multiple imaging sensors, which is proposed by Knauer et al. [40] in 2004. The principle of stereo deflectometry is shown in Fig. 3. Space points are searched along the rays of a master camera. Another camera is used to assist the master camera in determining points on the measured surface by matching gradients. For a chosen space point S1, its image point P1 on CCD (Charge Coupled Device) of Camera 1 can be obtained based on the result of camera calibration. A point Q1 can be located on screen based on the corresponding phase values of P1. An equivalent normal can be calculated based on points Q1, S1 and P1 according to the law of reflection. P2 is the image point of S1 on CCD of Camera 2. A screen point Q2 can be acquired based on phase values at P2. Another equivalent normal can be obtained based on P2, S1 and Q2. Theoretically, the normal vectors calculated from these two cameras should be the same for a surface point. Therefore, the gradient and 3D data of the measured surface can be determined by matching normal vectors calculated from the two cameras. Stereo deflectometry can achieve a nano-scale relative depth accuracy [41, 42] and relatively low absolute depth accuracy. However, the search process of space points takes a large amount of time. The algorithms of stereo deflectometry are required to be improved for faster measurement.

Illustration of stereo deflectometry
In order to clearly demonstrate advantages and disadvantages of the three categories of PMD, a comparison is listed in Table 1.
Challenges and further development
Figure 4 illustrates the techniques applied in the measurement process of stereo deflectometry. Phase shifting and phase unwrapping techniques are applied to obtain phase information [43, 44]. Two groups of perpendicular fringe patterns are required to establish a phase rectangular coordinate system [29,30,31,32,33,34,35,36, 45]. In order to suppress phase noise, each fringe pattern is captured several times to calculate the average [41, 42, 47,48,49]. Phase shifting algorithms with high steps are usually applied in PMD, due to the same reason [41, 42, 47,48,49]. In the process of measurement, displaying and capturing a large number of patterns can improve measurement accuracy but reduce speed [46]. How to increase the accuracy and speed of phase extraction is a challenge. Calibration of PMD includes screen calibration, camera calibration, and system calibration [40]. Screen calibration is to acquire the relationship between phase and physical distance in the displaying screen. Early PMD system [40] applied a projector to generate fringe patterns on a rough flat plate. Though the light source of the projector can be extended to infrared light or ultraviolet light to test surfaces with different reflectivity [50], it is difficult to accurately calibrate the corresponding physical position of the phase on the plate. As the displaying technologies advances currently stereo deflectometry systems [41, 47, 51] mainly use TFT (Thin Film Transistor) screens to display fringe patterns, since the manufacturing of TFT screens ensures good flatness and accurate pixel spacing of the screen [42, 48, 49, 52]. Camera calibration is to establish the relationship between a space point and the image on camera pixel, which is an essential task for camera based optical 3D measurement systems [55, 56]. A popular camera calibration method is based on a chessboard, proposed by Zhang [55]. Zhang’s method is easy to operate and improves the flexibility of camera calibration. In recent years, camera calibration methods based on phase targets have been investigated by researchers [57,58,59]. The calibration target of this type of method is an absolute phase map extracted from sinusoidal fringe patterns displayed on an LCD screen. Compared with Zhang’s method, a phase target-based method can achieve better calibration accuracy and resolution [57,58,59]. In addition, the displaying screen in PMD systems can be utilised as a phase target, which can avoid the use of additional calibration tools and can be combined with the subsequent system calibration. Therefore, camera calibration methods based on phase targets are widely applied in the calibration of PMD [41, 42, 47,48,49]. PMD is based on the principle of geometrical optics, therefore the relative positions of each component in the system must be obtained accurately before measurement. The process of obtaining the position of components is called system calibration. Traditional calibration methods complete the process with the assistance of calibration tools such as flat mirrors with markers [60, 61], extra cameras and/or screens [62] and calibration targets [63]. In order to avoid errors caused by additional calibration tools, self-calibration methods are studied to utilize the displaying screen to calibrate PMD systems [41, 42, 64]. Ren et al. improved system calibration accuracy by adding constraints in the process of parameter iterative optimization [41]. Xu et al. enhanced the compensation accuracy of the error between the real imaging process and the ideal imaging model by studying an iterative distortion compensation method [42]. Due to the imaging model being based on a pinhole camera model, which is far from a true camera model, accurate calibration of the imaging system remains a challenge to the PMD system. Once phase and system geometry is obtained, initial gradient and/or 3D data of the measured surface can be calculated through a gradient calculation process. The calculation process is affected by the phase error and calibration error in the system. Xu et al. investigated methods to decrease the influence on stereo deflectometry of phase error and calibration error by optimising component parameters [48] and system assignment [49]. Since iterative computation is required during the gradient calculation process for most PMD systems [27,28,29,30, 40,41,42, 45,46,47,48,49], it is a challenge to reduce the time spent on the iterative process. Reconstruction is the final step for the measurement of gradient interpolation based PMD [27,28,29,30, 40,41,42, 45,46,47,48,49]. 3D shape of the measured surface is reconstructed based on the obtained gradient data. Methods have been studied to improve reconstruction accuracy [47, 65,66,67]. Ren et al. improved the high-order least-squares integration method to increase the reconstruction accuracy of stereo deflectometry [47]. Huang et al. studied a least squares integration method based on splines for wavefront reconstruction [65]. However, a reconstruction method with both high accuracy and fast speed is still required to be investigated [67]. In addition to the problems in the specific technologies mentioned above, challenges exist in the future development of PMD.

Measurement process of stereo deflectometry
Measurement of low reflective surfaces
Rough surfaces and specular surfaces can be measured by fringe projection technique and PMD separately. However, there is no clear boundary between rough surfaces and specular surfaces. A number of surfaces are between rough and smooth, or partly rough and partly smooth. One solution for measuring such surfaces is to combine fringe projection techniques and PMD [61]. Another solution is to utilise the principle that the reflection rate of surface changes with light sources with different wavelengths. PMD with infrared light has been tested to measure surfaces with low reflection rate [50].
Fast measurement
Most current PMD systems apply TFT screens as a fringe-displaying screen, since calibration for the relationship between phase and physical distance on the screen can be avoided. Multiple fringe patterns are required to be displayed and captured during the measurement process in order to obtain absolute phase maps. However, display and switching between patterns takes plenty of time, which results in low capture speed. Several methods such as a cross pattern based on Fourier transform [25] and colour fringe techniques [68] have been studied for fast measurement, but have their problems. Fourier transform techniques cannot measure surfaces with large gradient change and discontinuous surfaces. Crosstalk between colour channels affects measurement accuracy seriously. One possible solution would be to use a projector to replace the TFT screen since it is easy to achieve high speed synchronization of the projector and camera. A new generation of display screens with storage and synchronization functions is needed for this development.
Measurement of high curvature changing surfaces
While PMD can achieve high measurement accuracy for surfaces with small curvature change [41, 42], it is difficult to maintain the same accuracy for the measurement of high curvature changing surfaces. This is because the increase of curvature will blur the reflected fringes and magnify phase noise. In addition, high curvature convex surfaces will make the reflected camera ray through the measured surface exceed the physical range of the display screen, which causes measurement failure. Graves et al. located a convex surface on a rotating platform, and stitched segments of the surface [69]. This method can measure convex surfaces successfully but is time-consuming. Carvalho et al. [70] measured roundness of a cylindrical surface by using a conical mirror to transfer the cylindrical surface into a planar image. It is expected that high curvature surfaces will be one of the research focuses of PMD.
Portable and online measurement
Miniaturization and portability are one of the development trends of PMD systems. As a result, PMD systems can be embedded into a manufacturing system and realise online measurement. Butel et al. [71] and Willomitzer et al. [72] explored to establish a PMD system based on mobile devices. It is expected that with the development of mobile technology and 5G [73], portable PMD systems with improved performance will emerge.
Conclusions
Measurement principles and development of PMD are presented in this paper. Single screen and sensor based PMD has a simple structure, however requires the measured surface to be small in size and low in curvature, or have known shape and position. Multi-screen based PMD has the burden of using an additional screen, which increases the volume of the system, and is not suitable for embedded measurement. Stereo deflectometry applies a search algorithm to determine the measured surface. This algorithm is time-consuming and not fit for fast measurement. Further studies are required to miniaturise the system, increase the measurement speed and range, so as to realise online and embedded measurement.
Availability of data and materials
Data sharing is not applicable to this article as no new data were created or analysed in this study.
References
Sherrington I, Smith E. The significance of surface topography in engineering. Precis Eng. 1986;8:79–87.
Gorthi S, Rastogi P. Fringe projection techniques: whither we are? Opt Lasers Eng. 2010;48:134–40.
Zhang S. Recent progresses on real-time 3D shape measurement using digital fringe projection techniques. Opt Lasers Eng. 2010;48:149–58.
Salvi J, Fernandez S, Pribanic T, Llado X. A state of the art in structured light patterns for surface profilometry. Pattern Recogn. 2010;43:2666–80.
Mériaudeau F, Rantoson R, Fofi D, Stolz C. Review and comparison of non-conventional imaging systems for three-dimensional digitization of transparent objects. J Electron Imaging. 2012;21:21105–1.
Chen F, Brown G, Song M. Overview of three-dimensional shape measurement using optical methods. Optim Eng. 2000;39:10–22.
Blais F. Review of 20 years of range sensor development. J Electron Imaging. 2004;13:231–40.
Wyant J. White light interferometry. Proc SPIE. 2002;4737:98–107.
Jiang X, Wang K, Gao F, Muhamedsalih H. Fast surface measurement using wavelength scanning interferometry with compensation of environmental noise. Appl Optics. 2010;49:2903–9.
Dávila A. Wavelength scanning interferometry using multiple light sources. Opt Express. 2016;24:5311–22.
Xue S, Chen S, Tie G. Near-null interferometry using an aspheric null lens generating a broad range of variable spherical aberration for flexible test of aspheres. Opt Express. 2018;26:31172–89.
Murphy P, Forbes G, Fleig J, Dumas P, Tricard M. Stitching interferometry: a flexible solution for surface metrology. Opt and Photonics. 2004;14(5):38–43.
Lee H, Kim S. Precision profile measurement of aspheric surfaces by improved Ronchi test. Optim Eng. 1999;38:1041–7.
Butel G, Smith G, Burge J. Binary pattern deflectometry. Appl Optics. 2014;53:923–30.
Kafri O, Glatt I. Moiré deflectometry: a ray deflection approach to optical testing. Optim Eng. 1985;24:944–60.
Servin M, Rodriguez-Vera R, Carpio M, Morales A. Automatic fringe detection algorithm used for moire deflectometry. Appl Optics. 1990;29:3266–70.
Wang B, Luo X, Pfeifer T, Mischo H. Moiré deflectometry based on Fourier-transform analysis. Measurement. 1999;25:245–53.
Legarda-Saenz R. Robust wavefront estimation using multiple directional derivatives in Moiré deflectometry. Opt Lasers Eng. 2007;45:915–21.
Schulz M, Ehret G, Fitzenreiter A. Scanning deflectometric form measurement avoiding path-dependent angle measurement errors. J Eur Opt Soc Rap Publ. 2010;5:10026.
Hao Q, Zhu Q, Wang Y. Deflectometer with synthetically generated reference circle for aspheric surface testing. Opt Laser Technol. 2005;37:375–80.
Amstel W, Bäumer S, Horijon J. Optical figure testing by scanning deflectometry. Proc SPIE. 1999;3739:283–90.
Miks A, Novak J, Novak P. Method for reconstruction of shape of specular surfaces using scanning beam deflectometry. Opt Lasers Eng. 2013;51:867–72.
Häusler G, Richter C, Leitz K, Knauer M. Microdeflectometry—a novel tool to acquire three-dimensional microtopography with nanometer height resolution. Opt Lett. 2008;33:396–8.
Liu Y, Lehtonen P, Su X. High-accuracy measurement for small scale specular objects based on PMD with illuminated film. Opt Lasers Eng. 2012;44(2):459–62.
Huang L, Ng CS, Asundi AK. Dynamic three-dimensional sensing for specular surface with monoscopic fringe reflectometry. Opt Express. 2011;19(13):12809–14.
Li W, Sandner M, Gesierich A, Burke J. Absolute optical surface measurement with deflectometry. Interferometry XVI: Appl. 2012;8494:84940G.
Bothe T, Li W, von Kopylow C, Juptner WP. High-resolution 3D shape measurement on specular surfaces by fringe reflection. Opt Metrology Prod Eng. 2004;5457:411–22.
Su, P.; Parks, R.; Angel, R.; Wang, L.; Burge, J. A new test for optical surfaces. SPIE Newsroom 2011, 20.
Xu X, Zhang X, Niu Z, Wang W, Zhu Y, Xu M. Self-calibration of in situ monoscopic deflectometric measurement in precision optical manufacturing. Opt Express. 2019;27(5):7523–36.
Xu X, Zhang X, Niu Z, Wang W, Xu M. Extra-detection-free monoscopic deflectometry for the in situ measurement of freeform specular surfaces. Opt Lett. 2019;44(17):4271–4.
Tang Y, Su X, Liu Y, Jing H. 3D shape measurement of the aspheric mirror by advanced phase measuring deflectometry. Opt Express. 2008;16:15090–6.
Petz M, Tutsch R. Measurement of optically effective surfaces by imaging of gratings. Opt Meas Syst Indust Inspect III. 2003;5144:288–94.
Petz M, Ritter R. Reflection grating method for 3D measurement of reflecting surfaces. Opt Meas Syst Industr Inspect II: Appl Production Eng. 2001;4399:35–41.
Guo H, Feng P, Tao T. Specular surface measurement by using least squares light tracking technique. Opt Lasers Eng. 2010;48(2):166–71.
Xiao Y, Su X, Chen W, Liu Y. Three-dimensional shape measurement of aspheric mirrors with fringe reflection photogrammetry. Appl Optics. 2012;51(4):457–64.
Li C, Li Y, Xiao Y, Zhang X, Tu D. Phase measurement deflectometry with refraction model and its calibration. Opt Express. 2018;26(26):33510–22.
Zhang Z, Liu Y, Huang S, Niu Z, Guo J, Gao N, et al. Full-field 3D shape measurement of specular surfaces by direct phase to depth relationship. Proc SPIE. 2016;10023:100230X.
Zhao P, Gao N, Zhang Z, Gao F, Jiang X. Performance analysis and evaluation of direct phase measuring deflectometry. Opt Lasers Eng. 2018;103:1339–51.
Liu Y, Huang S, Zhang Z, Gao N, Gao F, Jiang X. Full-field 3D shape measurement of discontinuous specular objects by direct phase measuring deflectometry. Sci Rep. 2017;7(1):10293.
Knauer M, Kaminski J, Hausler G. Phase measuring deflectometry: a new approach to measure specular free-form surfaces. Proc SPIE. 2004;5457:366–76.
Ren H, Gao F, Jiang X. Iterative optimization calibration method for stereo deflectometry. Opt Express. 2015;23:22060–8.
Xu Y, Gao F, Zhang Z, Jiang X. A holistic calibration method with iterative distortion compensation for stereo deflectometry. Opt Lasers Eng. 2018;106:111–8.
Towers CE, Towers DP, Jones JDC. Absolute fringe order calculation using optimised multi-frequency selection in full-field profilometry. Opt Lasers Eng. 2005;43(7):788–800.
Zhang Z, Towers CE, Towers DP. Time efficient color fringe projection system for 3D shape and color using optimum 3-frequency selection. Opt Express. 2006;14(14):6444–55.
Häusler G, Faber C, Olesch E, Ettl S. Deflectometry vs. interferometry. Opt Meas Syst Indust Inspect VIII, Int Soc Opt Photonics. 2013;8788:87881C.
Niu Z, Xu X, Zhang X, Wang W, Zhu Y, Ye J, et al. Efficient phase retrieval of two-directional phase-shifting fringe patterns using geometric constraints of deflectometry. Opt Express. 2019;27(6):8195–207.
Ren H, Gao F, Jiang X. Improvement of high-order least-squares integration method for stereo deflectometry. Appl Optics. 2015;54:10249–55.
Xu Y, Gao F, Jiang X. Enhancement of measurement accuracy of optical stereo deflectometry based on imaging model analysis. Opt Lasers Eng. 2018;111:1–7.
Xu Y, Gao F, Jiang X. Performance analysis and evaluation of geometric parameters in stereo Deflectometry. Engineering. 2018;4(6):806–15.
Höfer S, Burke J, Heizmann M. Infrared deflectometry for the inspection of diffusely specular surfaces. Adv Opt Technol. 2016;5(5–6):377–87.
Li C, Zhang X, Tu D. Posed relationship calibration with parallel mirror reflection for stereo deflectometry. Optim Eng. 2018;57(3):034103.
Petz M, Fischer FM, Tutsch R. Systematic errors in deflectometry induced by use of liquid crystal displays as reference structure. In: Proc. 21st IMEKO TC2 symposium on photonics in measurement; 2013. p. 16–8.
Huang L, Idir M, Zuo C, Asundi A. Review of phase measuring deflectometry. Opt Lasers Eng. 2018;107:247–57.
Zhang Z, Wang Y, Huang S, Liu Y, Chang C, Gao F, et al. Three-dimensional shape measurements of specular objects using phase-measuring deflectometry. Sensors. 2017;17(12):2835.
Zhang Z. A flexible new technique for camera calibration. In: IEEE Transactions on Pattern Analysis and Machine Intelligence. 2000;22(11):1330-34. https://doi.org/10.1109/34.888718.
Zuo C, Chen Q, Gu G, Feng S, Feng F, Li R, et al. High-speed three-dimensional shape measurement for dynamic scenes using bi-frequency tripolar pulse-width-modulation fringe projection. Opt Lasers Eng. 2013;51(8):953–60.
Huang L, Zhang Q, Asundi A. Camera calibration with active phase target: improvement on feature detection and optimization. Opt Lett. 2013;38(9):1446–8.
Schmalz C, Forster F, Angelopoulou E. Camera calibration: active versus passive targets. Optim Eng. 2011;50(11):113601.
Xu Y, Gao F, Ren H, Jiang X. An iterative distortion compensation algorithm for camera calibration based on phase target. Sensors. 2017;17(6):1188.
Huang L, Xue J, Gao B, Mcpherson C, Beverage J, Idir M. Modal phase measuring deflectometry. Opt Express. 2016;24:24649–64.
Breitbarth M, Kühmstedt P, Notni G. Calibration of a combined system with phase measuring deflectometry and fringe projection. Opt Meas Syst Industr Inspect VI. 2009;7389:738909.
Xiao Y, Su X, You Z. Pose transfer geometrical calibration for fringe-reflection optical three-dimensional measurement. Opt Commun. 2013;305:143–6.
Soumelidis A, Fazekas Z, Bodis-Szomoru A, Schipp F, Csakany B, Nemeth J. Specular surface reconstruction method for multi-camera corneal topographer arrangements. In: Recent advances in biomedical engineering; 2009. p. 639–60.
Olesch E, Faber C, Hausler G. Deflectometric self-calibration for arbitrary specular surfaces. DGaO proceedings; 2011.
Huang L, Xue J, Gao B, Zuo C, Idir M. Spline based least squares integration for two-dimensional shape or wavefront reconstruction. Opt Lasers Eng. 2017;91:221–6.
Li M, Li D, Jin C, Kewei E, Yuan X, Xiong Z, et al. Improved zonal integration method for high accurate surface reconstruction in quantitative deflectometry. Appl Optics. 2017;56(13):144–51.
Huang L, Idir M, Zuo C, Kaznatcheev K, Zhou L, Asundi A. Comparison of two-dimensional integration methods for shape reconstruction from gradient data. Opt Lasers Eng. 2015;64:1–11.
Flores JL, Legarda-Saenz R, Garcia-Torales G. Color deflectometry for phase retrieval using phase-shifting methods. Opt Commun. 2015;334:298–302.
Graves LR, Quach H, Choi H, Kim DW. Infinite deflectometry enabling 2π-steradian measurement range. Opt Express. 2019;27(5):7602–15.
Carvalho MJ, Veiga CL, Albertazzi A. Defectometry in cylindrical coordinates using a conical mirror: principles and proof of concept. J Braz Soc Mech Sci & Eng. 2019;41(9):380.
Butel GP, Smith GA, Burge JH. Deflectometry using portable devices. Optim Eng. 2015;54(2):025111.
Willomitzer F, Yeh CK, Gupta V, Spies W, Schiffers F, Walton M, et al. Uncalibrated Deflectometry with a Mobile device on extended specular surfaces. arXiv preprint arXiv. 2019;1907:10700.
Boccardi F, Heath RW, Lozano A, Marzetta TL, Popovski P. Five disruptive technology directions for 5G. IEEE Commun Mag. 2014;52(2):74–80.
Acknowledgements
Not applicable.
Funding
The research is funded by the Engineering and Physical Sciences Research Council (EPSRC) of the UK with the funding of the EPSRC Centre for Innovative Manufacturing in Advanced Metrology (Grand Ref: EP/I033424/1), and the EPSRC Future Advanced Metrology Hub (EP/P006930/1).
Author information
Authors and Affiliations
Contributions
YX and FG reviewed and composed the manuscript. XJ supported and supervised the research and provided guidance to the review. The authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Xu, Y., Gao, F. & Jiang, X. A brief review of the technological advancements of phase measuring deflectometry. PhotoniX 1, 14 (2020). https://doi.org/10.1186/s43074-020-00015-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s43074-020-00015-9