
Abstract
Distributed generator (DG) resources are small scale electric power generating plants that can provide power to homes, businesses or industrial facilities in distribution systems. Power loss reductions, voltage profile improvement and increasing reliability are some advantages of DG units. The above benefits can be achieved by optimal placement of DGs. Whale optimization algorithm (WOA), a novel metaheuristic algorithm, is used to determine the optimal DG size. WOA is modeled based on the unique hunting behavior of humpback whales. The WOA is evaluated on IEEE 15, 33, 69 and 85-bus test systems. WOA was compared with different types of DGs and other evolutionary algorithms. When compared with voltage sensitivity index method, WOA and index vector methods gives better results. From the analysis best results have been achieved from type III DG operating at 0.9 pf.
Similar content being viewed by others
Background
Distribution system is that part of the electric power system which connects the high-voltage transmission network to the low-voltage consumer service point. It is an important part of an electric power system since the supply of electric power to consumers is ensured by an efficient distribution system. The capital investment in the distribution system constitutes a significant portion of the total amount spent in the entire power system. Due to the recent market deregulations, this portion had become even more important.
Three divisions of an electric power system are generation, transmission and distribution. A distribution system connects loads to the transmission line at substations. Most of the losses about 70% losses are occurring at distribution level which includes primary and secondary distribution system, while 30% losses occurred in transmission level. Therefore distribution systems are main concern nowadays. The losses targeted at distribution level are about 7.5%.
By installing DG units at appropriate positions the losses can be minimized. Photovoltaic (PV) energy, wind turbines and other distributed generation plants are typically situated in remote areas, requiring the operation systems that are fully integrated into transmission and distribution network. The aim of the DG is to integrate all generation plants to reduce the loss, cost and greenhouse gas emission. The main reason for using DG units in power system is technical and economic benefits that have been presented as follows. Some of the major advantages are
-
Reduced system losses.
-
Voltage profile improvement.
-
Frequency improvement.
-
Reduced emissions of pollutants.
-
Increased overall energy efficiency.
-
Enhanced system reliability and security.
-
Improved power quality.
-
Relieved transmission and distribution congestion.
Some of the major economic benefits
-
Deferred investments for upgrades of facilities.
-
Reduced fuel costs due to increased overall efficiency.
-
Reduced reserve requirements and the associated costs.
-
Increased security for critical loads.
Determining proper capacity and location of DG sources in distribution systems is important for obtaining their maximum potential benefits. Studies have indicated that inappropriate selection of the location and size of DG may lead to greater system losses than losses without DG. Utilities like distribution companies which are already facing the problem of high power losses and poor voltage profiles cannot tolerate any further increase in losses.
Different types of distributed generations and their definitions have been discussed in Ackermann et al. (2001). An analytical approach was proposed by Acharya et al. (2006) and Duong Quoc et al. (2010) without taking voltage constraint. The uncertainties in operation including varying load, network configuration and voltage control devices have been considered in Su (2010).
Abu-Mouti and El-Hawary (2010) proposed ABC for allocation and sizing of DGs. Distributed generation uncertainties (Zangiabadi et al. 2011) have been taken in account for the placement of DG. A novel combined hybrid method GA/PSO is presented in MoradiMH (2011) for DG placement. Alonso et al. (2012), Hosseini et al. (2013) and Doagou-Mojarrad et al. (2013) proposed evolutionary algorithms for the placement of distributed generation. Sensitivity-based simultaneous optimal placement of capacitors and DG was proposed in Naik et al. (2013). In this paper analytical approach is used for sizing. Nekooei et al. (2013) proposed harmony search algorithm with multiobjective placement of DGs. With unappropriated DG placement, it can increase the system losses with lower-voltage profile. With the proper size of DG it gives the positive benefits in the distribution systems. Voltage profile improvement, loss reduction, distribution capacity increase and reliability improvements are some of the benefits of system with DG placement (Ameli et al. 2014).
Doagou-Mojarrad et al. (2013) and Kaur et al. (2014) proposed hybrid evolutionary algorithm for DG placement. Mesh distribution system analysis with time-varying load model was presented in Qian et al. (2011) and Murty and Kumar (2014). The backtracking search optimization algorithm (BSOA) was used in DS planning with multitype DGs in El-Fergany (2015); BSOA was proposed for DG placement with various load models. Simultaneous placement of DGs and capacitors with reconfiguration was proposed by Golshannavaz (2014) and Esmaeilian and Fadaeinedjad (2015). Dynamic load conditions have been taken in Gampa and Das (2015). Probabilistic approach with DG penetration was discussed in Kolenc et al. (2015). In distribution network voltage profile improvement and voltage stability issues have been taken as objectives in Aman et al. (2012), Sultana et al. (2016) and Singh and Parida (2016). Das et al. (2016) proposed symbiotic organisms search algorithm for DG placement. Zeinalzadeh et al. (2015), Khodabakhshian and Andishgar (2016) and Rahmani-andebili (2016) proposed simultaneous DGs and capacitors placement in distribution networks. Prakash and Lakshminaraya (2016) proposed whale optimization algorithm for sizing of capacitors.
In optimization algorithm literature there is no optimization algorithm that logically proves no-free-lunch (NFL) theorem for solving all optimization problems. But whale optimization algorithm (Mirjalili 2016) proves that it can be used for all optimization problems. A novel nature-inspired metaheuristic optimization algorithm called whale optimization algorithm is used to find the optimal DG size in this paper. To the best knowledge of authors WOA has not been used in literature of DG placement. WOA has been modeled based on the unique hunting behavior of humpback whales. The WOA is used to determine the optimal size of DGs at different power factors to reduce the power losses of the distribution system as much as possible and enhancing the voltage profile of the system. IEEE 15, 33, 69 and 85-bus systems are examined as test cases with different types of DG units for the objective function.
DG types can be characterized (Reddy et al. 2016) as
-
Type I Injects real power. It operates at unity pf. PV cells, microturbines, fuel cells.
-
Type II Injects reactive power. Synchronous compensator, capacitors, kVAR compensator etc.
-
Type III Real and reactive powers injection, e.g., synchronous machines (cogeneration, gas turbine, etc.).
-
Type IV Consuming reactive power but injecting real power, e.g., induction generators in wind farms.
Problem
Objective
More losses are there due to low voltage compared to transmission system in distribution side. Copper losses are predominant in distribution system; this can be calculated as follows
where \(I_i\) is current, \(R_i\) is resistance, and n is number of buses. Objective taken in this paper is real power loss minimization.
Constraints
The constraints are
-
Voltage constraints
$$0.95 \le V_{i} \le 1.05$$(2) -
Power balance constraints
$${P} + \sum \limits _{k = 1}^{{N}} {{P_{\mathrm{{DG}}}} = {P_\mathrm{{d}}} + {P_{\mathrm{{loss}}}}}$$(3) -
Upper and lower limits of DG
$$60 \le {P_{\mathrm{{DG}}}} \le 3000$$(4)
where the limits are in kW, kVAR and kVA for type I, II and III DG, respectively.
Index vector method
Optimal locations of DG are obtained by index vector (IV) method (VVSN Murthy 2013). The IV for bus n is given by:
Ip[k], Iq[k] are real and imaginary part of current in kth branch. \({\text {Qeff}}[n]\) and V[n] are effective load, voltage at nth bus. Total reactive load is taken as totalQ.
Algorithm
The algorithm is as follows
-
Step 1 Solve the feeder-line flow for the system.
-
Step 2 Calculate the IV of bus n using Eq. (5).
-
Step 3 Index vector was arranged in descending order.
-
Step 4 Normalized voltage values by \(V(i)= V(i)/0.95\).
-
Step 5 Buses with <1.01 are suitable locations for DG sizing.
For DG placement the locations are 6, 15, 61 and 55 for 15, 33, 69 and 85-bus test systems, respectively.
Whale Optimization Algorithm
Recently a new optimization algorithm called whale optimization algorithm (Mirjalili 2016) has been introduced to metaheuristic algorithm by Mirjalili and lewis. The whales are considered to be as highly intelligent animals with motion. The WOA is inspired by the unique hunting behavior of humpback whales. Usually the humpback whales prefer to hunt krills or small fishes which are close to the surface of sea. Humpback whales use a special unique hunting method called bubble net feeding method. In this method they swim around the prey and create a distinctive bubbles along a circle or 9-shaped path.
The mathematical model of WOA is described in the following sections
-
1.
Encircling prey.
-
2.
Bubble net hunting method.
-
3.
Search the prey.
Encircling prey
WOA expects that the present best candidate solution is the objective prey. Others try to update their positions toward best search agent. The behavior modeled is as
where \(\overrightarrow{{{{X}}^*}}\) , \(\overrightarrow{X}\) denote the position of best solution and position vector. Current iteration is denoted by t. \(\overrightarrow{A}\), \(\overrightarrow{C}\) are coefficient vectors. \(\overrightarrow{{a}}\) is directly diminished from 2 to 0. \(\overrightarrow{r}\) is a random vector [0, 1].
Bubble net hunting method
In this hunting method two approaches are there.
Shrinking encircling prey
Here \(\overrightarrow{{A}} \,\epsilon [-{a}, {a}]\), where \(\overrightarrow{{A}}\) is decreased from 2 to 0. Here \(\overrightarrow{{A}}\) position is setting down at random values in between \([-1,1]\). The new position of \(\overrightarrow{\mathrm{A}}\) is obtained between original position and position of the current best agent. Figure 1 shows the possible positions from (X, Y) toward (X*, Y*) that can be achieved by \(0 \le A \le 1\) in a 2D space represented by Eq. 8.

Bubble net search shrinking encircling mechanism
Spiral position updating
To mimic helix-shaped movement spiral equation is used.
In hunting whales swim around the prey in above two paths simultaneously. To update whales positions 50% probability is taken for above two methods.
where \({D^{'}} = \left| {\overrightarrow{{{{X}}^{*}}} - \overrightarrow{X} (t)} \right|\) represents the distance between whale and the prey (best solution). b is constant, l \(\epsilon\) \([-1,1]\). P is random number [0, 1]. Figure 2 shows the spiral updating position approach represented by Eq. 11.

Bubble net search spiral updating position mechanism
Search for prey
To get the global optimum values updating has done with randomly chosen search agent rather than the best agent.
\(\overrightarrow{{{{X}}_{{\mathrm{rand}}}}}\) is the random whales in current iteration. The symbol || denotes the absolute values. Figure 3 shows flowchart of the proposed algorithm.

Flowchart of proposed whale optimization algorithm
Implementation of WOA
The detailed algorithm is as follows.
-
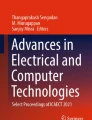
Step 1 Read line and load data of the system and solve the feeder-line flow for the system using load flow method. In this paper branch current load flow method is used.
-
Step 2 Find the best DG locations using the index vector method.
-
Step 3 Initialize the population/solutions and itmax = 50, number of DG locations \(d=1\) for, \(\hbox {dg}_{\hbox {min}}=60\), \(\hbox {dg}_{\hbox {max}}=3000\).
-
Step 4 Generate the population of DG sizes randomly using equation
\(\hbox {population} = (\hbox {dg}_{\hbox {max}} - \hbox {dg}_{\hbox {min}}) \times \hbox {rand}() + \hbox {dg}_{\hbox {min}}\)
where \(\hbox {dg}_{\hbox {min}}\) and \(\hbox {dg}_{\hbox {max}}\) are minimum and maximum limits of DG sizes.
-
Step 5 Find power losses for generated population.
-
Step 6 Current best solution is DG values with low losses.
-
Step 8 For updated population determine losses by performing load flow.
-
Step 9 If obtained losses are less, then replace current best solution with it or else go back to step 7
-
Step 10 Print the results if tolerance is <0.00001 or maximum iterations reached.
Simulation results
WOA is evaluated in the application of DG planning problem with IEEE 15, 33, 69 and 85-bus test systems as test cases. The WOA is used to obtain the optimal size of DG.
IEEE 15-bus system
IEEE 15-bus test system (Baran and Wu 1989) is shown in Fig. 4.

Single-line diagram of 15-bus system
Table 1 shows the real, reactive power losses and minimum voltages after the placement of different types of DGs. The optimal location for 15-bus test system is 6. The minimum voltage is more in case of type III DG operating at 0.9 pf. The losses are also lower with DG type III operating at 0.9 pf when compared to other types of DGs which is shown in Table 1. It is observed from the results that the DG size obtained is higher at lagging power factor compared to the size obtained at unity power factor; however, the losses are found lower with DGs at lagging power factor rather than DGs at unity power factor. This is due to the reason of reactive power available locally for the loads, thereby decreasing the reactive power available from substation.

Voltage profile of 15-bus system
The voltage profile also improves with DGs at lagging power factor, and it is observed in Fig. 5. The minimum voltage obtained with lagging power factor is better compared with DGs at unity power factor. Thus, for losses reduction and voltage profile improvement it is essential to consider the reactive power available from DGs. The results obtained with consideration of reactive power are better than the results obtained with DGs at unity power factor.
IEEE 33-bus system
IEEE 33-bus distribution system (Baran and Wu 1989) is shown in Fig. 6.

Single-line diagram of 33-bus system
Table 2 shows the real, reactive power losses and minimum voltages after the placement of different types of DGs. Tables 3 and 4 show comparison of results with type III DG operating at 0.9 pf and unity pf, respectively. The optimal location for 33-bus system is 15. The minimum voltage is more in case of type III DG operating at 0.9 pf. In Table 2 it is inferred that by using DG type III operating at 0.9 pf the losses are reduced more when compared to other types of DGs. It is observed from the results that the DG size obtained is higher at lagging power factor compared to the size obtained at unity power factor; however, the losses are found lower with DGs at lagging power factor rather than DGs at unity power factor. This is due to the reason of reactive power available locally for the loads, thereby decreasing the reactive power available from substation.

Voltage profile 33-bus system
The voltage profile also improves with DGs at lagging power factor, and it is observed in Fig. 7. The minimum voltage obtained for the system is better compared to the voltage obtained with DGs at unity power factor. Thus, it is essential to consider the reactive power available from DGs for its size calculations and its impact on losses reduction and voltage profile improvement. The results obtained with consideration of reactive power are better than the results obtained with DGs at unity power factor. When comparing (VVSN Murthy 2013) voltage sensitivity index (VSI) method, proposed method gives better results as shown in Tables 3 and 4.
IEEE 69-bus system
The IEEE 69-bus distribution system (Baran and Wu 1989) is shown in Fig. 8.

Single-line diagram of 69-bus system
Table 5 shows the real, reactive power losses and minimum voltages after the placement of different types of DGs. The optimal location for 69-bus system is 61. The minimum voltage is more in case of type III DG operating at 0.9 pf. In Table 5 it is inferred that by using DG type III operating at 0.9 pf the losses are reduced more when compared to other types of DGs.
From the results it is observed that the DG size is higher at lagging power factor compared to the size obtained at unity power factor; however, the losses are found lower with DGs at lagging power factor rather than DGs at unity power factor. This is because of reactive power available locally for the loads, thereby decreasing the reactive power available from substation. The voltage profile also improves with DGs at lagging power factor, and it is observed in Fig. 9.

Voltage profile of 69-bus system
The minimum voltage that is obtained for the system is better compared to the voltage obtained with DGs at unity power factor. Thus, it is essential to consider the reactive power available from DGs for its size calculations and its impact on losses reduction and voltage profile improvement. The results obtained with consideration of reactive power are better than the results obtained with DGs at unity power factor. When comparing (VVSN Murthy 2013) voltage sensitivity index (VSI) method, proposed method gives better results as shown in Tables 6 and 7.
IEEE 85-bus system
The IEEE 85-bus distribution system (Baran and Wu 1989) is shown in Fig. 10.

Single-line diagram of 85-bus system
Table 8 shows the real, reactive power losses and minimum voltages after the placement of different types of DGs. The optimal location for 85-bus test system is 55. The minimum voltage is more in case of type III DG operating at 0.9 pf. It is observed from the results that the DG size obtained is higher at lagging power factor compared to the size obtained at unity power factor; however, the losses are found lower with DGs at lagging power factor rather than DGs at unity power factor. This is due to the reason of reactive power available locally for the loads, thereby decreasing the reactive power available from substation.
Voltage profiles of the IEEE 85-bus system with and without placement of different types of DGs are shown in Fig. 11. From figure it is clear that the type III DG operating at 0.9 pf has better voltage profile improvement.

Voltage profile of 85-bus system

Convergence characteristics
Figure 12 shows convergence characteristics of IEEE 15, 33, 69 and 85 with 0.9 pf. The characteristics show that the WOA converged faster. Hence WOA is efficient, robust and capable of handling mixed integer nonlinear optimization problems.
Conclusions
A novel nature-inspired whale optimization algorithm is used to determine the optimal DG size in this paper. WOA is modeled based on the unique hunting behavior of humpback whales. Reduction of system power losses and improvement in voltage profile are the objectives taken in this paper. The proposed method has been applied on typical IEEE 15, 33, 69 and 85-bus radial distribution systems with different types of DGs and compared with other algorithms. Better results have been achieved with WOA when compared with other algorithms. The simulation results indicated that the overall impact of the DG units on voltage profile is positive and proportionate reduction in power losses is achieved. It can be interfered that best results can be achieved with type III DG operating at 0.9 pf, because it generates both real power and reactive power. The results show that the WOA is efficient and robust.
Abbreviations
- \(\overrightarrow{X}\) :
-
current position vector
- \(\overrightarrow{A}, \overrightarrow{C}\) :
-
coefficient vectors
- \(\overrightarrow{D}\) :
-
distance vector
- \(\overrightarrow{r}\) :
-
random vector
- \(\overrightarrow{X}\) :
-
current position vector
- \(\overrightarrow{{{{X}}^*}}\) :
-
best solution position
- b :
-
constant
- P :
-
random number in [0, 1]
- \(P_\mathrm{{d}}\) :
-
power demand
- \(P_{\mathrm{{DG}}}\) :
-
rating of DG
- \(P_{\mathrm{{loss}}}\) :
-
power loss
- PV:
-
photovoltaic
References
Abu-Mouti, F. S., & El-Hawary, M. E. (2010). Optimal distributed generation allocation and sizing in distribution systems via artificial bee colony algorithm. IEEE Transactions on Power Delivery, 26(4), 2090–2101.
Acharya, N., Mahat, P., & Mithulananthan, N. (2006). An analytical approach for DG allocation in primary distribution network. International Journal of Electrical Power & Energy Systems, 28(10), 669–678.
Ackermann, T., Andersson, G., & Soder, L. (2001). Distributed generation: A definition. Electric Power Systems Research, 57(3), 195–204, 519.
Alonso, M., Amaris, H., & Alvarez-Ortega, C. (2012). Integration of renewable energy sources in smart grids by means of evolutionary optimization algorithms. Expert Systems with Applications, 39(5), 5513–5522.
Aman, M., Jasmon, G., Mokhlis, H., & Bakar, A. (2012). Optimal placement and sizing of a DG based on a new power stability index and line losses. International Journal of Electrical Power & Energy Systems, 43(1), 1296–1304.
Ameli, A., Bahrami, S., Khazaeli, F., & Haghifam, M. R. (2014). A multiobjective particle swarm optimization for sizing and placement of dgs from DG owner’s and distribution company’s viewpoints. IEEE Transactions on Power Delivery, 29(4), 1831–1840.
Baran, M. E., & Wu, F. F. (1989). Optimal sizing of capacitors placed on a radial-distribution system. IEEE Transactions on Power Delivery, 4(1), 735–743.
Das, B., Mukherjee, V., & Das, D. (2016). DG placement in radial distribution network by symbiotic organisms search algorithm for real power loss minimization. Applied Soft Computing, 49, 920–936.
Doagou-Mojarrad, H., Gharehpetian, G. B., Rastegar, H., & Olamaei, J. (2013). Optimal placement and sizing of dg (distributed generation) units in distribution networks by novel hybrid evolutionary algorithm. Energy, 54, 129–138.
Doagou-Mojarrad, H., Gharehpetian, G., Rastegar, H., & Olamaei, J. (2013). Optimal placement and sizing of DG (distributed generation) units in distribution networks by novel hybrid evolutionary algorithm. Energy, 54, 129–138.
Duong Quoc, H., Mithulananthan, N., & Bansal, R. C. (2010). Analytical expressions for DG allocation in primary distribution networks. IEEE Transactions on Energy Conversion, 25(3), 814–820.
El-Fergany, A. (2015). Study impact of various load models on DG placement and sizing using backtracking search algorithm. Applied Soft Computing, 30, 803–811.
Esmaeilian, H. R., & Fadaeinedjad, R. (2015). Energy loss minimization in distribution systems utilizing an enhanced reconfiguration method integrating distributed generation. IEEE Systems Journal, 9(4), 1430–1439.
Gampa, S. R., & Das, D. (2015). Optimum placement and sizing of DGs considering average hourly variations of load. International Journal of Electrical Power & Energy Systems, 66, 25–40.
Golshannavaz, S. (2014). Optimal simultaneous siting and sizing of DGs and capacitors considering reconfiguration in smart automated distribution systems. Journal of Intelligent & Fuzzy Systems, 27(4), 1719–1729.
Hosseini, S. A., Madahi, S. S. K., Razavi, F., Karami, M., & Ghadimi, A. A. (2013). Optimal sizing and siting distributed generation resources using a multiobjective algorithm. Turkish Journal of Electrical Engineering and Computer Sciences, 21(3), 825–850.
Kaur, S., Kumbhar, G., & Sharma, J. (2014). A MINLP technique for optimal placement of multiple DG units in distribution systems. International Journal of Electrical Power & Energy Systems, 63, 609–617.
Khodabakhshian, A., & Andishgar, M. H. (2016). Simultaneous placement and sizing of DGs and shunt capacitors in distribution systems by using IMDE algorithm. International Journal of Electrical Power & Energy Systems, 82, 599–607.
Kolenc, M., Papic, I., & Blazic, B. (2015). Assessment of maximum distributed generation penetration levels in low voltage networks using a probabilistic approach. International Journal of Electrical Power & Energy Systems, 64, 505–515.
Mirjalili, S. (2016). The whale optimization algorithm. Advances in Engineering Software, 95, 51–67.
MoradiMH, A. M. (2011). A combination of genetic algorithm and particle swarm optimization for optimal DG location and sizing in distribution systems. International Journal of Electrical Power & Energy Systems, 33, 66–74.
Murty, V. V. S. N., & Kumar, A. (2014). Mesh distribution system analysis in presence of distributed generation with time varying load model. International Journal of Electrical Power & Energy Systems, 62, 836–854.
Naik, S. G., Khatod, D. K., & Sharma, M. P. (2013). Optimal allocation of combined dg and capacitor for real power loss minimization in distribution networks. International Journal of Electrical Power & Energy Systems, 53, 967–973.
Nekooei, K., Farsangi, M. M., Nezamabadi-Pour, H., & Lee, K. Y. (2013). An improved multi-objective harmony search for optimal placement of DGs in distribution systems. IEEE Transactions on Smart Grid, 4(1), 557–567.
Qian, K., Zhou, C., Allan, M., & Yuan, Y. (2011). Effect of load models on assessment of energy losses in distribution generation planning. Electric Power Research, 2, 1243–1250.
Prakash, D. B., & Lakshminaraya, C. (2016) Optimal siting of capacitors in radial distribution network using whale optimization algorithm. Alexandria Engineering Journal. doi:10.1016/j.aej.2016.10.002
Rahmani-andebili, M. (2016). Simultaneous placement of DG and capacitor in distribution network. Electric Power Systems Research, 131, 1–10.
Reddy, P. D. P., Reddy, V. V., & Manohar, T. G. (2016). Application of flower pollination algorithm for optimal placement and sizing of distributed generation in distribution systems. Journal of Electrical Systems and Information Technology, 3(1), 14–22.
Singh, A., & Parida, S. (2016). Novel sensitivity factors for DG placement based on loss reduction and voltage improvement. International Journal of Electrical Power & Energy Systems, 74, 453–456.
Su, C. L. (2010). Stochastic evaluation of voltages in distribution networks with distributed generation using detailed distribution operation models. IEEE Transactions on Power Systems, 25(2), 786–795.
Sultana, U., Khairuddin, A. B., Aman, M., Mokhtar, A., & Zareen, N. (2016). A review of optimum DG placement based on minimization of power losses and voltage stability enhancement of distribution system. Renewable and Sustainable Energy Reviews, 63(2016), 363–378.
VVSN Murthy, K. A. (2013). Comparison of optimal DG allocation methods in radial distribution systems based on sensitivity approaches. International Journal of Electrical Power & Energy Systems, 53, 450–467.
Zangiabadi, M., Feuillet, R., Lesani, H., Hadj-Said, N., & Kvaloy, J. T. (2011). Assessing the performance and benefits of customer distributed generation developers under uncertainties. Energy, 36(3), 1703–1712.
Zeinalzadeh, A., Mohammadi, Y., & Moradi, M. H. (2015). Optimal multi objective placement and sizing of multiple DGs and shunt capacitor banks simultaneously considering load uncertainty via MOPSO approach. International Journal of Electrical Power & Energy Systems, 67, 336–349.
Authors’ contributions
AB carried out the literature survey and participated in DG location section. AC participated in study on different nature-inspired algorithms for DG sizing. A carried out the DG sizing algorithm design and mathematical modeling. ABC participated in the assessment of the study and performed the analysis. ABC participated in the sequence alignment and drafted the manuscript. All authors read and approved the final manuscript.
Competing interests
The authors declare that they have no competing interests.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Reddy, P.D.P., Reddy, V.C.V. & Manohar, T.G. Whale optimization algorithm for optimal sizing of renewable resources for loss reduction in distribution systems. Renewables 4, 3 (2017). https://doi.org/10.1186/s40807-017-0040-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s40807-017-0040-1