
Abstract
This paper proposes a novel continuous sparse autoencoder (CSAE) which can be used in unsupervised feature learning. The CSAE adds Gaussian stochastic unit into activation function to extract features of nonlinear data. In this paper, CSAE is applied to solve the problem of transformer fault recognition. Firstly, based on dissolved gas analysis method, IEC three ratios are calculated by the concentrations of dissolved gases. Then IEC three ratios data is normalized to reduce data singularity and improve training speed. Secondly, deep belief network is established by two layers of CSAE and one layer of back propagation (BP) network. Thirdly, CSAE is adopted to unsupervised training and getting features. Then BP network is used for supervised training and getting transformer fault. Finally, the experimental data from IEC TC 10 dataset aims to illustrate the effectiveness of the presented approach. Comparative experiments clearly show that CSAE can extract features from the original data, and achieve a superior correct differentiation rate on transformer fault diagnosis.
Similar content being viewed by others

Background
Transformer is one of the most important equipment in power network. It will bring huge economic loss to the power network if it fails. The periodical monitoring of the condition of the transformer is necessary. There are a lot of methods used for detecting power failures such as oil breakdown voltage test, resistivity test and moisture analysis in transformer oil (Saha 2003). Among these methods, dissolved gas analysis (DGA) is the most widely used method (Arakelian 2004). This method diagnoses the transformer fault based on the analysis of dissolved gas concentrations in transformer oil (Duval 2003). The gases in transformer oil mainly include hydrocarbons, such as: methane (CH4), ethane (C2H6), ethylene (C2H4), acetylene (C2H2) and other gases, such as: hydrogen (H2) and carbon dioxide (CO2). In recent years, researchers have proposed transformer fault diagnosis methods including particle swarm optimization (Ballal et al. 2013), support vector machine (Chen et al. 2009), fuzzy learning vector quantization network (Yang et al. 2001) and back propagation (BP) neural network (Patel and Khubchandani 2004). Miranda et al. (2012) built a diagnosis system based on a set of auto-associative neural networks to diagnose the faults of power transformer. The information theoretic mean shift (ITMS) algorithm was adopted to densify the data clusters. Dhote and Helonde (2012) proposed a new five fuzzy ratios method and developed a fuzzy diagnostic expert system to diagnose the transformer fault. Souahlia et al. (2012) combined the Rogers and Doernenburg ratios together to be the gases signature. The multi-layer perceptron neural network was applied for decision making. Bhalla et al. (2012) applied a pedagogical approach for rule extraction from function approximating ANN (REFANN). REFANN derives linear equations by approximating the hidden unit activation function and splitting the input space into sub-region. Ren et al. (2010) used the rough set theory to reduce the degree of complex training samples; the speed of learning and training was enhanced. Then the quantum neural network was applied to the classifier of transformer fault diagnosis.
In 1996, sparse coding was proposed by Olshausen and Field (1996) which showed that the receptive fields of simple cells in mammalian primary visual cortex could learn higher level representations from the outside input signals (Vinje and Gallant 2000). After then, autoencoder was proposed to learn higher level features. In 2006, a new neural network model called deep belief network (DBN) was proposed by Hinton and Salakhutdinov (2006) as a new neural network (Cottrell 2006). With the development of the deep learning theory, DBN is widely used in many AI areas (Le Roux and Bengio 2010).
According to Bengio et al. (2006), DBN was successfully comprised of autoencoder (AE). He used AE as a basic model of DBN. With this structure, the training of handwritten digits recognition has achieved more than 99 % accuracy rate. It is proved that AE can completely replace restricted Boltzmann machine (RBM) as the basic elements of DBN. In 2008, Vincent et al. (2008) proposed denoising autoencoder (DAE) which could be adopted in corrupted data. DAE learns to project the corrupted data back onto the manifold, and can make the characteristics of the data more robust. On this basis, Vincent et al. (2010) introduced stacked denoising autoencoder (SDAE) by stacking several layers of DAE with the category constraint. At present, AE has been successfully applied to speech recognition (Dahl et al. 2012), handwritten digit recognition, natural language processing fields (Glorot et al. 2011), etc.
The current research on transformer fault diagnosis which applies neural network to the classification algorithm is mainly based on single-layer neural network. Instead of a single-layer neural network, a deep network composed of multiple layers of continuous sparse autoencoder (CSAE) is designed to solve the problem of transformer fault recognition. The second section describes the method of DGA, the relationship between the transformer fault classification and the concentrations of five fault gases has been introduced. In the third section, the basic autoencoder is briefly reviewed and a new continuous sparse autoencoder is proposed to extract the features of nonlinear data. The fourth section, several experiments are designed to verify the validity of CSAE. The last section concludes our work and points out the future direction.
Dissolved gas analysis
DGA is an analytic technique by detecting the dissolved gas in transformer oil. The insulating materials will release small amounts of hydrocarbons if transformer breaks down. The concentrations of these hydrocarbons can be used for electrical fault classification. The gases generated by transformer have useful information. They can be applied to electrical equipment diagnosis.
IEC publication 60599 (Duval 2003) provided a list of faults for DGA. The common transformer faults and their symbols are shown in Table 1.
Under the influence of thermal faults and electrical faults, hydrocarbon molecules of mineral oil can be decomposed from active hydrogen and hydrocarbon fragments. Then small amounts of gases, such like H2, CH4, C2H6, C2H4, and C2H2 will be released. The emergence of these gases often accompanies with transformer faults, therefore these five gases are named as fault gases. The fault gases are released in the following order: H2 → CH4 → C2H6 → C2H4 → C2H2. The concentration of hydrogen will increase steadily when the temperature is relatively low, while the acetylene will be released at a very high temperature. Therefore, the fault gases keep in touch with transformer fault. The relationship between the concentration of fault gases and transformer fault is shown in Table 2. In electrical faults, hydrogen is of high importance, while in thermal faults, acetylene tends to be important. In low thermal faults, methane, ethane and ethylene is of high importance but in high thermal faults only ethylene tends to be of high importance. The main difference between low thermal faults and high thermal faults is the concentration of thane. Ethane will be released when low thermal faults happen. According to the analysis above, DGA can diagnose the transformer fault by detecting the concentrations of these five fault gases.
Methods
DBN model
DBN is a logic model consisted of multiple layers of RBM. It also can be composed of multiple layers of AE. The structure of DBN based on multiple layers of AE is shown in Fig. 1.

DBN model
The process of training DBN can be divided into the following steps:
-
Step 1 Each layer of AE can be used for unsupervised feature learning. In the process of training, each layer of AE can extract different features from the input data. These features are stored in the feature vector W. In this step, the optimization is not meant for the entire DBN.
-
Step 2 One layer of BP neural network is set at the bottom layer of DBN. The reason of setting one layer of BP is to receive trained AE weight. After AE unsupervised training, BP will calculate the error between DBN output and expected output. The error will be passed back to previous layers of AE. According to the error, the weight matrix of the whole DBN will be updated. The process of reconstruction will be repeated based on the set epochs until the error converges. It realizes the optimization of feature data.
DBN overcomes the disadvantages of signal-layer neural network: falling into local optimum and long training time.
Basic autoencoder
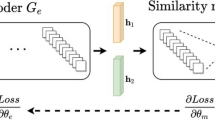
Autoencoder is a famous neural network model in which the target output is as same as the input, such as \(y^{\left( i \right)} = x^{\left( i \right)}\). Autoencoder has two processes: encoder process and decoder process. In the encoder process, the input is transformed into the hidden features. In the decoder process, the hidden features are reconstructed to be the target output. The weight matrix of each layer can be updated through training neural network. The structure is shown in Fig. 2.

Model of AE
Where \(x_{i},i \in 1,\ldots,n\) is the input of autoencoder, \(h_{j},j \in 1,\ldots,k\) is the value of hidden units, \(\hat{x}_{i},i \in 1,\ldots,n\) is the target output, \(W^{(i)} ,i \in 1,2\) denotes the weight matrix. AE tries to learn a function like \(h_{W,b} \left( x \right) = x\) which can make \(\hat{x}\) approximate to x. \(h_{W,b} \left( x \right)\) is an activation function. The purpose of training AE is to get \(\left\{ {W^{\left( l \right)} ,b^{\left( l \right)} } \right\}\).
In order to acquire the weight matrix, the square error of single sample can be calculated as
where \(x\) and \(y\) denote the real input and output respectively, \(h_{W,b} \left( x \right)\) is the output of activation function.
The error loss function of whole network can be obtained
where m is the number of training examples, \(\lambda\) controls the relative importance of the second term, the first term of loss function (2) is an average sum-of-squares error term, the second term is the weight decay term which tends to decrease the magnitude of weights and prevent over-fitting.
Continuous sparse autoencoder
In order to extract the features of nonlinear data, the zero-mean Gaussian with variance \(\sigma^{2}\) stochastic unit is added into activation function of each visible unit.
Equation (3) refers to the activation function with Gaussian stochastic unit, \(\varphi_{j}\) represents the activation function, and \(s_{j}\) is the output of network with input \(x_{i}\), \(a_{i}\) is the bias unit, \(N_{j} \left( {0,1} \right)\) means a zero-mean Gaussian, \(\sigma\) and \(N_{j} \left( {0,1} \right)\) composes \(n_{j} = \sigma \cdot N_{j} \left( {0,1} \right)\), \(n_{j}\) subjects to the distribution as
The unit activation of hidden layer can be defined as (Andrew 2012)
where \(a_{j}^{\left( 2 \right)} \left( {x^{\left( i \right)} } \right)\) means the activation of hidden layer unit with the input \(x\), \(\rho\) means the sparse parameter. In this paper, we assume that \(\hat{\rho }_{j} { = }\rho\), the difference between \(\hat{\rho }_{j}\) and \(\rho\) can be calculated by Kullback–Leibler (KL) divergence (Kullback and Leibler 1951)
where \(\beta\) is the weight coefficient that controls the sparse penalty factor. According to the loss function (1), suppose that \(L_{2}\) is a hidden layer, \(L_{1}\) represents the input layer and \(L_{3}\) is the output layer, the error of output layer can be calculated
where \(\delta_{\text{i}}^{\left( 3 \right)}\) means the error of output layer, \(a_{i}^{\left( 3 \right)}\) is the activation function, \(z_{i}^{\left( 3 \right)} = W_{\text{i}}^{\left( 2 \right)} a_{i}^{\left( 2 \right)} + b^{\left( 2 \right)}\). In the hidden layer \(L_{2}\), the error of each unit can be calculated as
The gradient descent optimization parameters can be obtained:
-
1.
Setting \(\varDelta W^{\left( l \right)} : = 0,\varDelta b^{\left( l \right)} : = 0\)
-
2.
Calculating \(\nabla_{{W^{\left( l \right)} }} J\left( {W,b;x,y} \right)\) and \(\nabla_{{b^{\left( l \right)} }} J\left( {W,b;x,y} \right)\)
-
3.
Calculating \(\varDelta W^{\left( l \right)} : = \varDelta W^{\left( l \right)} + \nabla_{{W^{\left( l \right)} }} J\left( {W,b;x,y} \right)\) and \(\varDelta b^{\left( l \right)} : = \varDelta b^{\left( l \right)} + \nabla_{{b^{\left( l \right)} }} J\left( {W,b;x,y} \right)\)
-
4.
Updating the weight:
$$W^{\left( l \right)} = W^{\left( l \right)} - \alpha \left[ {\left( {\frac{1}{m}\varDelta W^{\left( l \right)} } \right) + \lambda W^{\left( l \right)} } \right]$$$$b^{\left( l \right)} = b^{\left( l \right)} - \alpha \left[ {\left( {\frac{1}{m}\varDelta b^{\left( l \right)} } \right)} \right]$$
In this paper, manifold learning is drawn to analyze the effect of stochastic unit. According to the manifold learning theory, the high-dimensional data can be represented by low-dimensional manifold. The operator \(p(x|\tilde{x})\) attempts to transform the high-dimensional \(x\) to low-dimensional \(\tilde{x}\). In the process of learning, the distribution of stochastic unit is not in high-dimensional manifold, so the gradient of \(p(x|\tilde{x})\) should be changed greatly to approximate x. Essentially, CSAE can be considered as a manifold learning algorithm. The stochastic unit added into activation function can change the gradient direction and prevent over-fitting.
The contrast experiment of autoencoder and CSAE has been designed. The swiss-roll manifold is adopted as the experiment dataset. The result of experiment is shown in Fig. 3. Figure 3a is the raw swiss-roll manifold, Fig. 3b, c are the reconstruction of swiss-roll dataset by autoencoder and CSAE. It can be concluded that CSAE is more suitable for reconstructed of continuous data than autoencoder.

Reconstruction of swiss-roll mainfold a raw swiss-roll mainfold. b reconstruction of swiss-roll mainfold by autoencoder, c reconstruction of swiss-roll mainfold by CSAE
Experiments
Dataset and normalization
In this paper we use IEC TC 10 as the experiment dataset (Duval and DePablo 2001) provided by Mirowski and LeCun (2012). There are 134 transformer fault samples in this dataset. Each sample contains the concentrations of CH4, C2H2, C2H4, C2H6 and H2 in parts per million (ppm). Three ratios including CH4/H2, C2H2/C2H4, C2H4/C2H6 can be calculated as the input of DBN. The five classifications of transformer faults corresponding to binary codes can be set as the output of DBN, they are 00001 (partial discharges), 00010 (low energy discharge), 00100 (high energy discharge), 01000 (thermal faults <700 °C) and 10000 (thermal faults >700 °C).
The concentrations of gases dissolved in transformer oil have a direct guiding significance for transformer fault analysis. In order to reduce the singularity of data and improve the training speed, the input data can be normalized to \(\left[ {y_{min} ,y_{max} } \right]\) by normalization formula
where \(y\) represents the normalized data, making \(y_{max} = 1\), \(y_{min} = - 1\). \(x_{max}\) is the maximum value of input data, while \(x_{min}\) is the minimum value of input data.
Network structure
The network structure is shown in Fig. 4. The white circles are neuron units and the blue circles denote bias units. There are six layers: the input layer V, the hidden layer H0, the hidden layer H1, the hidden layer H2, the hidden layer H3 and the output layer T. Layer V, layer H0 and layer H1 compose the first CSAE network. Layer H1, layer H2 and layer H3 compose the second CSAE network. Layer H2, layer H3 and layer T compose BP network. In layer V, there are 3 units (not including the bias unit, the same below) which contain three ratios of transformer fault gases. T layer contains 5 units corresponding to the transformer faults binary codes. The hidden layer H0 contains 10 units which are used to store the high-dimensional features. The hidden layer H1 contains 3 units which are used to reconstruct the high-dimensional features to low-dimensional approximate output. The hidden layer H2 and H3 contain 11 and 3 units respectively.

Network structure
The flowchart of proposed method is shown in Fig. 5. The phases of transformer fault diagnosis mainly include preprocessing and DBN training. In the preprocessing phase, the three ratios of transformer fault samples can be calculated. Then the data can be normalized by Eq. (12) as the input of DBN. In DBN training phase, two CSAEs are used to extract the hidden features of input, BP is used to reduce the dimension of hidden features and classify the transformer fault.

Flowchart of proposed method
Parameters setting
Parameters are very important for neural network. Recent studies (Nguyeny et al. 2013) have shown that if parameters is not set properly, the correct differentiation rate will be low and the speed of convergence will be slow. According to previous experience, the authors set parameters as follows.
Learning rate: the learning rate is very important. If it is big, the system will become unstable. Otherwise the training epoch will become too long. Generally, a relatively small learning rate will make the error converge asymptotically. At the same time, because the network size is different, the learning rate should be adjusted according to the network size. In this experiment, the learning rate is set to be 0.05.
Momentum: in order to avoid over-fitting and fine-tune the direction of gradient, we apply the momentum parameter to change the gradient of likelihood function. In this experiment, the momentum is set to be 0.9.
Sparse parameter: sparse parameter is used to determine the unit activation. In this experiment, the sparse parameter is set to be 0.01.
Simulation
About the simulation environment, the software is Matlab 8.1.0 and the hardware is the desktop computer with Intel i5 processer with 8 GB RAM and 2.5 GHz frequency, and the operating system is Microsoft Windows 8.1 professional. In this experiment, the 125 samples are applied to the training dataset, and the other 9 samples are applied to the predicting dataset. The K-fold is adopted to the cross validation method. In this section, K is set to be 5, it means that 125 samples will be divided into 5 partitions. One partition is used for testing and the other 4 partitions are used for training. The process will repeat 5 times until each partition can be regarded as training and testing data.
Through training of 125 samples, Fig. 6 shows the error curve of CSAE and BP. It can be proved that the convergence speed of CSAE curve is faster than BP curve. And the error of CSAE curve is lower than BP curve.

CSAE and BP error curve
In order to verify the validity of our approach, the classification accuracy of K-nearest neighbor (K-NN), support value machine (SVM), BP and CSAE are contrasted. Table 3 shows the classification accuracy of K-NN algorithm. When K = 15, the accuracy is 90 %. SVM is applied as one of the standard tool for pattern classification and recognition. SVM converts samples into a feature space using kernel functions which commonly include radial basis function (RBF), polynomial function (PLOY) and sigmoid function (SIG) (Hsu and Lin 2002). The classification accuracy of SVM with different kernel functions is shown in Table 4, the highest correct rate of SVM using RBF as the kernel function is 79.9 %.
Through 1000 epochs training, Table 5 lists the correct differentiation rates of BP and CSAE. These two models have the same parameters of network which can ensure the fairness of results. The correct rate of BP algorithm is 86.6 % in TF1 and HED. The correct rate of CSAE algorithm is 100 % in TF1, 83.3 % in PD.
Wilcoxon rank sum test (Wilcoxon 1945) is a well-known nonparametric statistical test used to evaluate the ranking of features. In this paper, the Wilcoxon rank sum test is used to compare the differences of CSAE and BP algorithm. It is assumed that h = 1 denotes the fact that the correct differentiation rate of CSAE is significantly better than BP; h = 0 denotes the fact that the correct differentiation rate of CSAE is as same as BP; the level of significance α = 0.05. The results are shown in Table 6. The average correct differentiation rate of CSAE and BP are 93.6 ± 6.22 and 84.1 ± 2.44 % respectively. The p value is 0.0195 which is smaller than α. So it can be concluded that the correct differentiation rate of CSAE is significantly better than BP.
Based on the training network, 9 test samples are adopted to check the forecast ability of CSAE. In Table 7, it can be seen that the fault of CSAE algorithm forecast is consistent with the actual fault.
Conclusion and future work
In this paper, we propose a novel CSAE model which can be used in unsupervised learning of representations. CSAE added Gaussian stochastic unit in activation function is adopted to solve the problem of transformer fault recognition. The IEC three ratios are calculated by the concentrations of dissolved gases. Then the three ratios are normalized to reduce data singularity. In the experiments, DBN is established by two layers of CSAE and one layer of BP. CSAE is applied to unsupervised training and getting features. BP is used for supervised training and transformer fault classification. Comparative experiments clearly show the advantages of CSAE on transformer fault diagnosis. This neural network diagnosis algorithm is better than the traditional algorithm with its value in the actual transformer fault diagnosis.
The CSAE model have the advantages of outstanding recognition ability of continuous data, unsupervised feature learning ability, high precision and robust ability. The main disadvantages of CSAE model include long time training and high performance computer requirement. In summary, CSAE has great potential. In the future work, we will continue to research CSAE and try to use some tricks to shorten the training time. Furthermore, we plan to investigate some optimization strategies to diagnosis the transformer fault.
References
Andrew NG (2012) Autoencoders and sparsity. http://ufldl.stanford.edu/wiki/index.php/Au-toencoders_and_Sparsity
Arakelian VG (2004) The long way to the automatic chromatographic analysis of gases dissolved in insulating oil. IEEE Electr Insul Mag 20(6):8–25. doi:10.1109/MEI.2004.1367506
Ballal MS, Ballal DM, Suryawanshi HM, Choudhari BN (2013) Computational intelligence algorithm based condition monitoring system for power transformer. In: IEEE 1st international conference on condition assessment techniques in electrical systems, IEEE CATCON 2013, pp 154–159. doi:10.1109/CATCON.2013.6737538
Bengio Y, Lamblin P, Popovici D, Larochelle H (2006) Greedy layer-wise training of deep networks. In: 20th annual conference on neural information processing systems, NIPS 2006, pp 153–160
Bhalla D, Bansal RK, Gupta HO (2012) Function analysis based rule extraction from artificial neural networks for transformer incipient fault diagnosis. Int J Electr Power 43(1):1196–1203. doi:10.1016/j.ijepes.2012.06.042
Chen W, Pan C, Yun Y, Liu Y (2009) Wavelet networks in power transformers diagnosis using dissolved gas analysis. IEEE Trans Power Deliver 24(1):187–194. doi:10.1109/TPWRD.2008.2002974
Cottrell GW (2006) New life for neural networks. Science 313(5786):454–455. doi:10.1126/science.1129813
Dahl GE, Yu D, Deng L, Acero A (2012) Context-dependent pre-trained deep neural networks for large-vocabulary speech recognition. IEEE Trans Audio Speech 20(1):30–42. doi:10.1109/TASL.2011.2134090
Dhote NK, Helonde JB (2012) Diagnosis of power transformer faults based on five fuzzy ratio method. WSEAS Trans Power Syst 7(3):114–125
Duval M (2003) New techniques for dissolved gas-in-oil analysis. IEEE Electr Insul M 19(2):6–15. doi:10.1109/MEI.2003.1192031
Duval M, DePablo A (2001) Interpretation of gas-in-oil analysis using new IEC publication 60599 and IEC TC 10 databases. IEEE Electr Insul Mag 17(2):31–41. doi:10.1109/57.917529
Glorot X, Bordes A, Bengio Y (2011) Domain adaptation for large-scale sentiment classification: a deep learning approach. In: Proceedings of the 28th international conference on machine learning, ICML 2011, pp 513–520
Hinton GE, Salakhutdinov RR (2006) Reducing the dimensionality of data with neural networks. Science 313(5786):504–507. doi:10.1126/science.1127647
Hsu C, Lin C (2002) A comparison of methods for multiclass support vector machines. IEEE Trans Neural Network 13(2):415–425. doi:10.1109/72.991427
Kullback S, Leibler RA (1951) On Information and Sufficiency. Ann Math Stat 22(1):79–86. doi:10.1214/aoms/1177729694
Le Roux N, Bengio Y (2010) Deep belief networks are compact universal approximators. Neural Comput 22(8):2192–2207. doi:10.1162/neco.2010.08-09-1081
Miranda V, Castro ARG, Lima S (2012) Diagnosing faults in power transformers with autoassociative neural networks and mean shift. IEEE Trans Power Deliver 27(3):1350–1357. doi:10.1109/TPWRD.2012.2188143
Mirowski P, LeCun Y (2012) Statistical machine learning and dissolved gas analysis: a review. IEEE Trans Power Deliv 27(4):1791–1799. http://www.mirowski.info/pub/dga
Nguyeny TD, Tranyz T, Phungy D, Venkateshy S (2013) Learning parts-based representations with nonnegative restricted boltzmann machine. In: 5th Asian conference on machine learning, ACML 2013, pp 133–148
Olshausen BA, Field DJ (1996) Emergence of simple-cell receptive field properties by learning a sparse code for natural images. Nature 381(6583):607–609. doi:10.1038/381607a0
Patel NK, Khubchandani RK (2004) ANN based power transformer fault diagnosis. J Inst Eng (India) Electr Eng Div 85:60–63
Ren X, Zhang F, Zheng L, Men X (2010) Application of quantum neural network based on rough set in transformer fault diagnosis. In: Proceedings of the power and energy engineering conference (APPEEC), 2010 Asia-Pacific, 28–31 March 2010, pp 1–4. doi:10.1109/APPEEC.2010.5448911
Saha TK (2003) Review of modern diagnostic techniques for assessing insulation condition in aged transformers. IEEE Trans Dielectr El In 10(5):903–917. doi:10.1109/TDEI.2003.1237337
Souahlia S, Bacha K, Chaari A (2012) MLP neural network-based decision for power transformers fault diagnosis using an improved combination of Rogers and Doernenburg ratios DGA. Int J Electr Power 43(1):1346–1353. doi:10.1016/j.ijepes.2012.05.067
Vincent P, Larochelle H, Bengio Y, Manzagol P-A (2008) Extracting and composing robust features with denoising autoencoders. In: Proceedings of the 25th international conference on machine learning, pp 1096–1103
Vincent P, Larochelle H, Lajoie I, Bengio Y, Manzagol P-A (2010) Stacked denoising autoencoders: learning useful representations in a deep network with a local denoising criterion. J Mach Learn Res 11:3371–3408
Vinje WE, Gallant JL (2000) Sparse coding and decorrelation in primary visual cortex during natural vision. Science 287(5456):1273–1276. doi:10.1126/science.287.5456.1273
Wilcoxon F (1945) Individual comparisons by ranking methods. Biom Bull 1(6):80–83
Yang HT, Liao CC, Chou JH (2001) Fuzzy learning vector quantization networks for power transformer condition assessment. IEEE Trans Dielect Electr Insul 8(1):143–149. doi:10.1109/94.910437
Authors’ contributions
A mathematical model for transformer fault diagnosis has been proposed. All authors read and approved the final manuscript.
Acknowledgements
This work was supported by National Natural Science Foundation of China (41276086), National Natural Science Foundation of Shandong Province (ZR2015FM004).
Competing interests
The authors declare that they have no competing interests.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Wang, L., Zhao, X., Pei, J. et al. Transformer fault diagnosis using continuous sparse autoencoder. SpringerPlus 5, 448 (2016). https://doi.org/10.1186/s40064-016-2107-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s40064-016-2107-7