
Abstract
In this paper, the exponential stability for a class of delayed competitive neural networks is studied. By applying the inequality technique and non-reduced-order approach, some novel and useful criteria of global exponential stability for the addressed network model are established. Moreover, a numerical example is presented to show the feasibility and effectiveness of the theoretical results.
Similar content being viewed by others

1 Introduction
Competitive neural networks (CNNs), firstly proposed by Meyer-Bäse et al. in [1], involve two types of memory: long-term and short-term memories. Viewed mathematically, there are two classes of state variables in such a network model described by ODEs, one is short-term memory, which depicts fast neuronal activity, another one is long-term memory, which depicts the slow unsupervised synaptic modifications. Such a network model possesses a two-layer structure and then extensive fundamental results have been reported to address the dynamic behaviors of such a network model. For example, Lu and He in [2] gave some sufficient conditions for the global exponential stability of delayed competitive neural networks with different time scales. Nie and Cao [3], Duan and Huang [4] studied the dynamics of equilibrium for two different kinds of competitive neural networks with time-varying delay and discontinuous activations, respectively. Nie et al. [5, 6], and Xu et al. [7], respectively, investigated the multistability issue of CNNs by using the fixed point theorem and the contraction mapping theorem. Pratap [8] and Yang [9] investigated the finite time synchronization and adaptive lag synchronization problem of delayed CNNs. For other interesting theoretical results of CNNs, one may refer to [10–16] and the references therein.
On the other hand, for evident engineering and biological reasons, it is often useful to bring an inertial term into a neural system. For instance, comparing to electronic neural networks of the standard resistor–capacitor variety, Babcocka and Westervelt showed that the dynamics could be complex when the neuron couplings were of an inertial nature [17]. Another evident biological reason for introducing an inertial term into the standard neural system is the implementation of the membrane of a hair cell by equivalent circuits containing an inductance in semicircular canals of some animals, such as pigeon [18]. Therefore, various dynamical behaviors for types of neural networks with inertial terms have been studied by many authors, such as in [19–26] and the references therein. However, the method employed in the aforementioned works are all through a reduced-order approach, that is, by changing the second-order inertial neural networks into the first-order system, the reduced-order method clearly expanding the dimension of the system, which increases the difficulty of the theoretical analysis for the NNs.
In this paper, abandoning the traditional reduced-order method and being inspired by recent work [27, 28], we further study the issue of exponential stability of a delayed inertial CNNs. The main contribution of this paper lies in the following aspects.
- (1)
By introducing the non-reduced-order approach, a novel Lyapunov–Krasovskii functional proposed and new criteria are established for the exponential stability of the considered model.
- (2)
Different from existing works on the stability analysis of delayed CNNs in which the reduced-order approach is employed, the presented non-reduced-order approach significantly reduces the computational complexity and improves some recently reported ones.
This paper is outlined as follows. In Sect. 2, a model description and preliminaries are presented. In Sect. 3, exponential stability of the considered model is studied. In Sect. 4, a numerical example is provided. Finally, a conclusion is drawn in Sect. 5.
2 Model description and preliminaries
In this paper, we consider the following delayed inertial CNN model:
where \(x_{i}(t) \) is the neuron current activity level, \(f_{j}(t) \) and \(g_{j}(t-\tau (t))\) are the activation functions, \(m_{il}(t)\) is the synaptic efficiency, \(p_{l}\) is the constant external stimulus, \(D _{ij}\) represents the connection weight between the ith neuron and the jth neuron, \(c_{i}\) is the strength of the external stimulus, \(D _{ij}^{\tau }\) represents the synaptic weight of delayed feedback and \(I_{i}\) is the constant input. In system (2.1), the second derivatives are called inertial terms, and the time-varying delay \(\tau (t)\) is a differentiable function satisfying
Firstly, we shall rewrite system (2.1) as follows:
Setting
where \(\mathbf{p}=(p_{1},p_{2},\ldots ,p_{q})^{T}\), \(\mathbf{m_{i}(t)}=(m _{i1}(t),m_{i2}(t),\ldots ,m_{iq}(t))^{T}\), and summing up the LTM over l, the neural networks (2.1) can be rewritten as the state-space form
where \(\|\mathbf{p}\|^{2}=p^{2}_{1}+\cdots +p^{2}_{q}\) is a constant. Without loss of generality, the input stimulus p is assumed to be normalized with unit magnitude \(\|\mathbf{p}\|^{2}=1\), then the above networks are simplified as
the initial conditions associated with (2.1) or (2.3) are to be of the form
Throughout this paper, the activation functions are assumed to satisfy the following assumption.
- (H1):
For any \(i=1,2,\ldots ,n\), the activation functions \(f_{i}\) and \(g_{i}\) satisfy Lipschitz condition, that is, there exist constants \(L_{i}^{F}\) and \(L_{i}^{G}\) such that for all
$$ \bigl\vert f_{i}(u)-f_{i}(v) \bigr\vert \leq L_{i}^{F} \vert u-v \vert ,\qquad \bigl\vert g_{i}(u)-g_{i}(v) \bigr\vert \leq L_{i}^{G} \vert u-v \vert . $$
Definition 2.1
Suppose \((\mathbf{x}(t),\mathbf{s}(t))^{T}\) and \((\mathbf{x}^{*}(t),\mathbf{s}^{*}(t))^{T}\) are two solutions of the system satisfying the initial condition, the system is said to be globally exponentially stable if there are two positive constants ε and M depending on the initial values, such that
3 Main result
In this section, we will derive some sufficient conditions which ensure the global exponential stability for system (2.3).
Theorem 3.1
Suppose that Assumption (H1) holds. The inertial CNNs (2.3) with initial values (2.4) are globally exponentially stable if the algebra conditions hold:
and
where
and
Proof
Let \((\mathbf{x(t), s(t)})^{T}=(x_{1}(t),x_{2}(t),\ldots ,x_{n}(t),s_{1}(t),s_{2}(t), \ldots ,s_{n}(t))^{T} \) and \((\mathbf{x^{*}(t),s^{*}(t)})^{T}=(x^{*} _{1}(t),x^{*}_{2}(t),\ldots ,x^{*}_{n}(t),s^{*}_{1}(t),s^{*}_{2}(t), \ldots ,s^{*}_{n}(t))^{T} \) be two solutions of inertial CNNs (2.1).
Define \(y_{i}(t)=x_{i}(t)-x^{*}_{i}(t)\), \(z_{i}(t)=s_{i}(t)-s^{*}_{i}(t)\), then system (2.3) can be rewritten as
where
In view of (3.1), (3.2) and combining with the continuity theory, there exists a sufficiently small \(\varepsilon >0\) such that
and
where
and
Consider a Lyapunov–Krasovskii functional given by
First, let us compute the derivative of \(V_{1}(t)\), we have
It follows from (H1) and the fundamental inequality \(uv\leq \frac{1}{2}(u^{2}+v^{2})\) () that
and
Substituting (3.8), (3.9) into (3.7) leads to
Secondly, calculating the derivative of \(V_{2}(t)\), we obtain
One can easily deduce that
and thus
By virtue of (2.3) and a straightforward computation
which, together with (3.10), and (3.11), gives
Hence,
which implies that
where \(\mathcal{O}(e^{-\varepsilon t})\) means that \(|y_{i}(t)|\), \(|z_{i}(t)|\) exponentially converge to 0 with the same order as \(e^{-\varepsilon t}\). This completes the proof of Theorem 3.1. □
4 Numerical simulations
In this section, a numerical example is presented to justify the effectiveness of the proposed exponential stability results. The simulation is performed using Matlab software.
Example 4.1
Let us consider the following inertial CNNs:
where \(f_{i}(u)=g_{i}(u)=\frac{1}{2}(|u+1|-|u-1|)\), \(i=1,2\). The parameters in (4.1) are assumed to be \(a_{1}=2\), \(a_{2}=3\), \(b_{1}=5\), \(b_{2}=3\), \(I _{1}=3\), \(I_{2}=2.5\), \(c_{1}=c_{2}=0.6\), and
It is not difficult to check that \(L_{i}^{F}=L_{i}^{G}=1\), \(i=1,2\). Let us chose \(\xi _{11}=\xi _{12}=\eta _{11}=\eta _{12}=1\), \(\eta _{21}=0.5\), \(\eta _{22}=0.1\), \(\xi _{21}=1.3\), \(\xi _{22}=1.7\), \(\lambda _{11}=6.67\), \(\lambda _{12}=5.89\), \(\lambda _{21}=2.79\), \(\lambda _{22}=3.33\), \(\mathscr{B}_{1}=-0.575\), \(\mathscr{B}_{2}=-0.215\), \(\mathcal{B}_{1}=-0.325\), \(\mathcal{B}_{2}=-0.085\). Through simple manipulation, we have
and
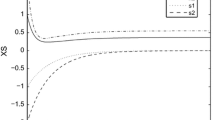
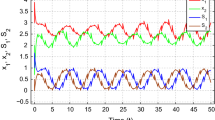
Then, all the conditions of Theorem 3.1 are satisfied and thus the inertial CNN (4.1) is exponentially stable. This fact is revealed in Fig. 1.

The state trajectories of state variables \(x_{i}(t)\), \(s _{i}(t)\) with different values, \(i=1,2\)
Remark 4.1
In recent years, many excellent theoretical results on competitive neural networks have been published (see [10, 11, 29–32] and the references therein), however, these references do not consider the effect of inertia terms. On the other hand, to the best of our knowledge, fewer dynamic results on delayed inertial CNNs have been reported. Therefore, our results are new and complement some existing ones.
Remark 4.2
For technical reasons, we impose some conditions on the derivatives of the time-varying delay (see (2.2)), that is, we demand that the delay increase not too fast. As for the case of \(\mu >1\) or the stability criteria are independent of time delay, which are our objectives for future research.
5 Conclusion
In this paper, different from the existing methods which usually apply the variable substitution to transform the second-order inertial system into the first-order differential equations, we investigated the exponential stability for a class of delayed inertial CNNs. A new Lyapunov functional is constructed and the well-known Barbalat lemma is used to obtain the stability criteria. Secondly, the asymptotic and adaptive synchronization of the addressed inertial networks is studied by designing two new control strategies. Finally, two examples with numerical simulations are provided to show the effectiveness of the derived theoretical results.
References
Meyer-Bäse, A., Ohl, F., Scheich, H.: Singular perturbation analysis of competitive neural networks with different time scales. Neural Comput. 8, 1731–1742 (1996)
Lu, H., He, Z.: Global exponential stability of delayed competitive neural networks with different time scales. Neural Netw. 18, 243–250 (2005)
Nie, X., Cao, J.: Existence and global stability of equilibrium point for delayed competitive neural networks with discontinuous activation functions. Int. J. Syst. Sci. 43, 459–474 (2012)
Duan, L., Huang, L.: Global dynamics of equilibrium point for delayed competitive neural networks with different time scales and discontinuous activations. Neurocomputing 123, 318–327 (2014)
Nie, X., Zheng, W.: Dynamical behaviors of multiple equilibria in competitive neural networks with discontinuous nonmonotonic piecewise linear activation functions. IEEE Trans. Cybern. 46, 679–693 (2015)
Nie, X., Cao, J., Fei, S.: Multistability and instability of competitive neural networks with non-monotonic piecewise linear activation functions. Nonlinear Anal., Real World Appl. 45, 799–821 (2019)
Xu, D., Tan, M.: Multistability of delayed complex-valued competitive neural networks with discontinuous non-monotonic piecewise nonlinear activation functions. Commun. Nonlinear Sci. Numer. Simul. 62, 352–377 (2018)
Pratap, A., Raja, R., Cao, J., et al.: Further synchronization in finite time analysis for time-varying delayed fractional order memristive competitive neural networks with leakage delay. Neurocomputing 317, 110–126 (2018)
Yang, X., Cao, J., Long, Y., et al.: Adaptive lag synchronization for competitive neural networks with mixed delays and uncertain hybrid perturbations. IEEE Trans. Neural Netw. 21, 1656–1667 (2010)
Duan, L., Fang, X., Yi, X., et al.: Finite-time synchronization of delayed competitive neural networks with discontinuous neuron activations. Int. J. Mach. Learn. Cybern. 9, 1649–1661 (2018)
Pratap, A., Raja, R., Cao, J., et al.: Stability and synchronization criteria for fractional order competitive neural networks with time delays: an asymptotic expansion of Mittag-Leffler function. J. Franklin Inst. 356, 2212–2239 (2019)
Liu, D., Zhu, S., Sun, K.: Global anti-synchronization of complex-valued memristive neural networks with time delays. IEEE Trans. Cybern. 49, 1735–1747 (2018)
Chen, C., Zhu, S., Wei, Y.: Closed-loop control of nonlinear neural networks: the estimate of control time and energy cost. Neural Netw. 117, 145–151 (2019)
Duan, L., Wei, H., Huang, L.: Finite-time synchronization of delayed fuzzy cellular neural networks with discontinuous activations. Fuzzy Sets Syst. 361, 56–70 (2019)
Duan, L., Huang, L., Guo, Z., et al.: Periodic attractor for reaction-diffusion high-order Hopfield neural networks with time-varying delays. Comput. Math. Appl. 73, 233–245 (2017)
Huang, C., Cao, J., Wen, F., et al.: Stability analysis of SIR model with distributed delay on complex networks. PLoS ONE 11, e0158813 (2016)
Babcock, K.L., Westervelt, R.M.: Stability and dynamics of simple electronic neural networks with added inertia. Physica D 23, 464–469 (1986)
Angelaki, D.E., Correia, M.J.: Models of membrane resonance in pigeon semicircular canal type II hair cells. Biol. Cybern. 65(1), 1–10 (1991)
Wang, J., Tian, L.: Global Lagrange stability for inertial neural networks with mixed time-varying delays. Neurocomputing 235, 140–146 (2017)
Chen, C., Zhu, S., Wei, Y., Yang, C.: Finite-time stability of delayed memristor-based fractional-order neural networks. IEEE Trans. Cybern. to be published. https://doi.org/10.1109/TCYB.2018.2876901
Wang, J., Huang, C., Huang, L.: Discontinuity-induced limit cycles in a general planar piecewise linear system of saddle-focus type. Nonlinear Anal. Hybrid Syst. 33, 162–178 (2019)
Huang, C., Yang, Z., Yi, T., et al.: On the basins of attraction for a class of delay differential equations with non-monotone bistable nonlinearities. J. Differ. Equ. 256, 2101–2114 (2014)
Duan, L., Fang, X., Huang, C.: Global exponential convergence in a delayed almost periodic Nicholson’s blowflies model with discontinuous harvesting. Math. Methods Appl. Sci. 41(5), 1954–1965 (2018)
Duan, L., Huang, C.: Existence and global attractivity of almost periodic solutions for a delayed differential neoclassical growth model. Math. Methods Appl. Sci. 40, 814–822 (2017)
Wang, J., Chen, X., Huang, L.: The number and stability of limit cycles for planar piecewise linear systems of node-saddle type. J. Math. Anal. Appl. 469, 405–427 (2019)
Tan, Y., Huang, C., Sun, B., et al.: Dynamics of a class of delayed reaction–diffusion systems with Neumann boundary condition. J. Math. Anal. Appl. 458, 1115–1130 (2018)
Li, X., Li, X., Hu, C.: Some new results on stability and synchronization for delayed inertial neural networks based on non-reduced order method. Neural Netw. 96, 91–100 (2017)
Huang, C., Liu, B.: New studies on dynamic analysis of inertial neural networks involving non-reduced order method. Neurocomputing 325, 283–287 (2019)
Balasundaram, K., Raja, R., Pratap, A., et al.: Impulsive effects on competitive neural networks with mixed delays: existence and exponential stability analysis. Math. Comput. Simul. 155, 290–302 (2019)
Huang, C., Zhang, H.: Periodicity of non-autonomous inertial neural networks involving proportional delays and non-reduced order method. Int. J. Biomath. 12, 1950016 (2019)
Tan, Y., Zhang, M.: Global exponential stability of periodic solutions in a nonsmooth model of hematopoiesis with time-varying delays. Math. Methods Appl. Sci. 40, 5986–5995 (2017)
Duan, L., Zhang, M., Zhao, Q.: Finite-time synchronization of delayed competitive neural networks with different time scales. J. Inf. Optim. Sci. 40, 813–837 (2019)
Acknowledgements
The author would like to express the sincere appreciation to the editor and reviewer for their helpful comments in improving the presentation and quality of the paper. In particular, the authors express sincere gratitude to Prof. Lian Duan for helpful discussion when revision work was being carried out.
Availability of data and materials
Not applicable.
Funding
This work was jointly supported by the National Natural Science Foundation of China (11701007, 11971076), Natural Science Foundation of Anhui Province (1808085QA01, 1908085QA02), China Postdoctoral Science Foundation (2018M640579), Postdoctoral Science Foundation of Anhui Province (2019B329), Innovation Foundation for Postgraduate of AUST (2019CX2067), Key Program of Scientific Research Fund for Young Teachers of AUST (QN201605).
Author information
Authors and Affiliations
Contributions
All authors contributed equally to this manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they do not have any competing interests in this manuscript.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Shi, M., Guo, J., Fang, X. et al. Global exponential stability of delayed inertial competitive neural networks. Adv Differ Equ 2020, 87 (2020). https://doi.org/10.1186/s13662-019-2476-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-019-2476-7