
Abstract
In this paper, we present a semi-analytic method called the local fractional homotopy analysis method (LFHAM) for solving differential equations involving local fractional derivatives based on the local fractional calculus and the homotopy analysis method. The suggested analytical technique always provides a simple way of constructing a series of solutions from the higher-order deformation equation. The LFHAM guarantees the convergence of the series solutions using the nonzero convergence-control parameter. Three examples are provided to illustrate the efficiency and high accuracy of the method.
Similar content being viewed by others

1 Introduction
Many real-life problems are modeled to linear and nonlinear partial differential equations in most cases. However, solving these equations in closed form is very difficult, more especially the nonlinear models. In recent years, many mathematicians and engineers have devoted considerable time to develop efficient and stable techniques for solving nonlinear models including the non-differentiable problems which arise naturally in mathematical physics and engineering [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37]. In mathematical literature, the most commonly used fractional derivative operators are the Caputo and Riemann–Liouville fractional derivatives [38, 39]. However, these derivatives have a kernel with singularity which limits their applicability to many real-world problems [40]. To overcome the problem of the singularity of the kernel, a new fractional derivative with exponential kernel was introduced by Caputo and Fabrizio in 2015 [41]. Unfortunately, the kernel of Caputo–Fabrizio fractional derivative was not non-local and the associated integral was not a fractional operator [42]. To solve the problem of the Caputo–Fabrizio fractional derivative, Atangana and Baleanu introduced an efficient fractional derivative operator with non-local and non-singular kernel called the Atangana–Baleanu fractional derivative (AB) in Caputo and Riemann–Liouville sense in 2016 (see [43]). Due to the non-local behavior of the AB fractional derivative, it has been used to develop some powerful mathematical methods for solving real-world problems such as the fractional Laplace decomposition method [44], the fractional homotopy perturbation transform method [45, 46], the fractional Adams-Bashforth method [47], and the fractional homotopy analysis transform method [48,49,50,51] to mention a few. Besides, all the recently proposed techniques have nothing to do with the existence of any small/large physical parameter. So, in real-world problems, these methods can be applied much more widely than the well-known analytical method called the perturbation technique which entirely relies on the existence of small/large parameter [52] (perturbation quantity), since not all mathematical models contain the so-called perturbation quantity. Other semi-analytical methods, such as the local fractional Adomian decomposition method [53, 54], the local fractional homotopy perturbation method [55, 56], the local fractional variational iteration method [57,58,59,60], the local fractional Sumudu decomposition method [61], the local fractional natural homotopy perturbation method [62], and many more, have been proposed and successfully applied to various linear and nonlinear models. However, most of these existing techniques cannot guarantee the convergence of the series solutions, hence are not suitable for solving highly nonlinear problems. To overcome the limitations of the current methods, a Chinese mathematician Liao proposed a semi-analytic method called the homotopy analysis method (HAM) for solving highly nonlinear models [63]. The homotopy analysis method is a combination of the classical perturbation technique [64,65,66,67] and the homotopy, a concept in topology, and does not rely on the small/large parameter. The advantage of the homotopy analysis method over the existing techniques is the excellent freedom of choosing the initial guess and the existence of the so-called nonzero convergence-control parameter. Based on the basic idea of the homotopy analysis method, many numerical and analytical techniques have been proposed. Marinca and Herisa suggested the optimal homotopy analysis method [68] in 2008. In 2009, Niu and Wang introduced a one-step optimal homotopy analysis method [69], and the spectral homotopy analysis method based on the Chebyshev pseudospectral method [70] was proposed by Motsa et al. in 2010. The predictor homotopy analysis method [71] was also suggested in 2010, and recently in 2018 Singh et al. successfully applied the homotopy analysis method and the Sumudu transform method to fractional Drinfeld–Sokolov–Wilson equation [72]. Besides, many authors have discovered that the Adomian decomposition method (ADM), the homotopy perturbation method (HPM), and the variational iteration method (VIM) are all special cases of the homotopy analysis method (HAM) when the nonzero convergence-control parameter \(\hslash =-1\) (see [73,74,75,76,77]).
Motivated by the ongoing research in the literature, in this paper we introduce an iterative method called the local fractional homotopy analysis method (LFHAM) for solving non-differentiable problems arising in fractal media. The LFHAM gives a series of solutions which converge rapidly within a few terms with the help of the nonzero convergence-control parameter. Some applications are given to verify the efficiency and stability of the method. In Table 1, some useful results in fractal space are presented.
The remaining sections of this work are organized as follows. In Sect. 2, some background notations of local fractional calculus are presented. In Sect. 3, the local analysis and convergence of local fractional homotopy analysis method are discussed. Applications of LFHAM are shown in Sect. 4. The conclusion of this paper is given in Sect. 5.
2 Preliminaries and notations of local fractional calculus
Definition 1
Let \(\wp: \Im \rightarrow \aleph \) be a function defined on a fractal set ℑ of fractal dimension α say (\(0<\alpha <1\)). Then a real-valued function \(\wp (t)\) on the fractal set ℑ is defined as [14, 15]
where \(t^{\alpha }\in \Im \) and \(0<\alpha <1\).
Lemma 1
Let F be a fractal and a subset of the real line. If \(v: (F,d) \rightarrow (\varOmega ',d')\) is a bi-Lipschitz mapping, then there are constants \(\rho,\tau >0\), and \(F\subset \mathbb{R}\),
such that for all \(t_{1},t_{2}\in F\),
As a direct consequence of Lemma 2.1 [15, 19], we deduce
such that
where α denotes the fractal dimension of the set F. Besides, in fractal geometry the result is related to the fractal coarse-grained mass function \(\gamma ^{\alpha }[F,\beta _{1},\beta _{2}]\) as
with
where \(H^{\alpha }\) denotes the α-dimensional Hausdorff measure.
Definition 2
Suppose that there exists [14, 15]
with \(|t-t_{0}|<\delta \), for \(\delta,\varepsilon >0\) and δ, \(\varepsilon \in \mathbb{R}\). Then the function \(v(t)\) is called local fractional continuous at \(t=t_{0}\) and is denoted by \(\lim_{t\rightarrow t_{0}}v(t_{0})\). Equivalently, the function \(v(t)\) is called local fractional continuous function on the interval \((\beta _{1},\beta _{2})\) and is denoted by
provided Eq. (8) is valid for \(t \in (\beta _{1},\beta _{2})\).
Definition 3
The local fractional derivative of the function \(v(t)\) of order α at \(t=t_{0}\) is defined as follows [14, 15]:
where
For any \(t\in (\beta _{1},\beta _{2})\), there exists [14, 15]
which is denoted by
Moreover, the local fractional derivatives of higher order are defined as follows [14, 15]:
and the local fractional partial derivative of higher order is defined as follows [14, 15]:
Property 1
Suppose that \(v^{(k+1)\alpha }\in C_{\alpha }(\beta _{1},\beta _{2})\) for \(k=0,1,\ldots,n\) and \(0<\alpha \leq 1\), then
with \(\beta _{1}< t_{0}<\xi <t<\beta _{2}\), \(\forall t\in (\beta _{1},\beta _{2})\), where \(v^{k\alpha }(t)= \overbrace{\tfrac{d^{ \alpha }}{dt^{\alpha }}\cdots \tfrac{d^{\alpha }}{dt^{\alpha }}v(t)} ^{n+1 \text{ times} }\).
Proof
Remark 1
Property 1 does not hold if the function is only Holder continuous. See [9].
Definition 4
The local fractional integral of the function \(v(t)\) of order α in the interval \([\gamma, \beta ]\) is defined as follows [14, 15]:
where \(\Delta _{\tau i}=\tau _{i+1}-\tau _{i}\), \(\Delta _{\tau }=\max {\Delta _{\tau 0},\Delta _{\tau 1},\Delta _{\tau 2},\ldots, }[\tau _{i},\tau _{i+1}]\), \(\tau _{0}=\eta \), \(\tau _{N}=\beta \) is a partition of the interval \([\eta, \beta ]\).
Based on the local fractional integral defined in Eq. (17), the following properties hold (see [14, 15]):
where \(\beta <\zeta <\eta \), \(v(t), w(t)\in C_{\alpha }(\eta, \beta)\).
Definition 5
The Riemann–Liouville fractional integral operator of order \(\alpha >0\) of a function \(f(t)\in C^{m}_{\tau }\) and \(\tau \geq -1\) is defined as follows [39]:
Below we list some important properties of \(I^{\alpha }\) (see [1,2,3]).
-
(i)
If \(f\in C_{\tau }\), \(\tau \geq -1\), \(\alpha, \beta \geq 0\), and \(\gamma >-1\), then
$$\begin{aligned}& I^{\alpha }t^{x}=\frac{\varGamma (x+1)}{\varGamma (x+\alpha +1)}t^{\alpha +x}, \end{aligned}$$(24)$$\begin{aligned}& I^{\alpha }I^{\beta }f(t)=I^{\alpha +\beta }, \qquad I^{\alpha }I^{\beta }f(t)=I^{\beta }I^{\alpha }f(t). \end{aligned}$$(25) -
(ii)
For \(m-1<\alpha \leq m\), \(m\in \mathbb{N}\) and \(f\in C^{m}_{\tau }\), \(\tau \geq -1\), then
$$ D^{\alpha }I^{\alpha }f(t)=f(t), \qquad I^{\alpha }D^{\alpha }f(t)=f(t)- \sum_{i=0}^{m-1}f^{i} \bigl(0^{+}\bigr)\frac{t ^{i}}{i!}, \quad t>0. $$(26)
Definition 6
The function \(f(t)\) in the Caputo fractional derivative is defined as follows [39, 41]:
where \(m-1<\alpha <m\), \(m\in \mathbb{N}\), \(t>0\).
3 Local fractional homotopy analysis method
In this section, we illustrate the basic idea of the local fractional homotopy analysis method. Consider the following nonlinear local fractional partial differential equation:
where N is the nonlinear operator, x and t denote the independent variables, and \(u(x,t)\) denotes the local fractional unknown function. Using the fundamentals of the traditional homotopy analysis method proposed by Liao [63], we construct a convex non-differentiable homotopy called the zero order deformation equation
where \(p\in [0,1]\) is an embedding parameter, \(\hslash \neq 0\) is the nonzero convergence-control parameter, and \(H(x,t)\neq 0\) is the local fractional nonzero auxiliary function, \(\psi (x,t;p)\) is the local fractional unknown function, \(u_{0}(x,t)\) is an initial guess of \(u(x,t)\), and \(\textit{\pounds}_{\alpha }=\frac{\partial ^{\alpha }}{\partial t ^{\alpha }}\) is the linear local fractional operator with the property that
Based on the concept of homotopy analysis method, one has great freedom to choose the auxiliary linear operator and the initial guess. Obviously, when \(p=1\) and \(p=0\), it holds
respectively. Thus, as p increases from 0 to 1, the solution \(\psi (x,t;p)\) varies from the initial guess \(u_{0}(x,t)\) to the solution \(u(x,t)\). Expanding \(\psi (x,t;p)\) using the local fractional Taylor series [14, 15] with respect to p, we deduce
where
If the auxiliary linear operator, the initial guess, the auxiliary function, and the convergence-control parameter are chosen properly, then Eq. (32) converges at \(p=1\), and
is the solution of the original problem Eq. (28). According to Eq. (32), the governing equation can be deduced from the zero deformation Eq. (29).
Define a local fractional vector
Differentiating Eq. (29) m-times with respect to the embedding parameter p and then setting \(p=0\) and finally dividing by m!, we obtain the so-called Mth-order deformation equation
where
and
Applying the local fractional integral operator on both sides of Eq. (36), we deduce
Using computer algebra software such as Mathematica or Matlab, we can easily obtain the series solutions of \(u_{m}(x,t)\) for \(m\geq 1\) at Mth-order deformation equation as follows:
The cornerstone of the local fractional homotopy analysis method is the nonzero convergence-control parameter ℏ which provides us with a convenient way to guarantee the convergence of the series solutions of Eq. (40).
In the next subsection, we prove the convergence analysis of Eq. (40).
3.1 Convergence analysis of the LFHAM
Lemma 2
Suppose that the series solution of Eq. (40) is convergent, and let X be any set of local fractional continuous functions which satisfies Eq. (8) and \(u_{n}\in X\). Then \(B(X)\) is a Banach space.
Proof
Let \(u_{n}\in B(X)\). Then we need to show that the local fractional continuous function \(u_{n}\) converges uniformly in \(B(X)\). Let \(x\in X\). Then, for all \(n,m\in {\mathbb{N}}\), we have
which implies \((u_{n}(x))\) is a Cauchy sequence, hence converges. Let the limit of \((u_{n}(x))\) be \((u(x))\). Then we want show that \(u_{n}(x)\rightarrow u(x)\) in \(B(X)\).
For any given \(\varepsilon ^{\alpha }>0\), there is a positive integer N such that, for every \(n, m>N\),
Thus, for every x,
This implies that \(u_{n}\) uniformly converges to u. The proof is complete. □
Theorem 1
If the series
converges to \(\xi (x,t)\), where \(v_{m}(x,t)\) is governed by Eq. (36) under the definition of Eq. (37) and Eq. (38), then \(\xi (x,t)\) must be the exact solution of Eq. (28).
Proof
Let
Then we deduce that \(\lim_{M\rightarrow \infty }\sum_{m=1}^{M}v_{m}(x,t)=0\). Besides, using Eq. (36), we get
On the other hand, since \(H(x,t)\neq 0\), \(\hslash \neq 0\) and by the linearity property of Eq. (30), we obtain
Similarly, based on Eq. (37), we get
Generally, since \(\psi (x,t;p)\neq N [u(x,t) ]\) in Eq. (28), let the residual error \(\epsilon (x,t;p)= N [u(x,t) ]\). This implies
which satisfies the solution of Eq. (28). Hence, the residual error of the local fractional Taylor series on the embedding parameter p yields
Then using Eq. (45) and the assumption that \(p=1\), we deduce
Thus, Eq. (49) proved that \(\xi (x,t)\) satisfies the exact solution of the original problem Eq. (28). □
4 Applications of the LFHAM
In this section, we demonstrate the applicability of the LFHAM to linear and nonlinear partial differential equations involving local fractional derivatives.
Example 1
Consider the following non-homogeneous local fractional heat conduction equation:
subject to the initial condition
Based on Eq. (50) and Eq. (51) and the procedure of the LFHAM, it is natural to choose \(v_{0}(x,t)=E_{\alpha }(x^{\alpha })\) to be the initial guess.
We choose the linear operator as
with the property \(\textit{\pounds}_{\alpha }[C]=0\), where C is an integral constant.
We define the nonlinear operator as follows:
We construct the zero-order deformation equation:
Obviously, when \(p=0\) and \(p=1\),
Then the Mth-order deformation equation is defined as follows:
where
Setting \(H(x,t)=1\) and applying the local fractional integral on the Mth-order deformation Eq. (56), we get
Then Eq. (58) yields
Hence
and so on.
Setting the convergence-control parameter \(\hslash =-1\), the series solutions of Eq. (50) are given by
The results obtained in Eq. (60) were entirely in agreement with the local fractional homotopy analysis method [56].
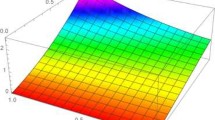
Figures 1: The 3D surface solution of Eq. (50) for \(\alpha =1\) is presented in Fig. 1(a). The surface solution of Eq. (40) for (\(\alpha =\frac{1}{2}\)) is depicted in Fig. 1(b). The non-differentiable surface solution is depicted in Fig. 1(c). The surface solution behavior of \(v(x,t)\) for different values of \(\alpha =1,\frac{1}{2},\frac{\ln (2)}{\ln (3)}\) is given in Fig. 1(d). The absolute error analysis for \(\alpha =1\) of 10th and 20th-order approximations of the LFHAM is presented in Fig. 1(e) and Fig. 1(f), respectively. In Fig. 1(g) and Fig. 1(h), the absolute error analysis of 10th and 20th-order approximations of the non-differentiable problem for \(\alpha =\frac{\ln (2)}{\ln (3)}\) is illustrated.

(a) Numerical simulation of Eq. (50) for \(\alpha =1\), (b) 3D surface solution for \(\alpha =\frac{1}{2}\), (c) 3D non-differentiable surface solution behavior for \(\alpha =\frac{\ln (2)}{\ln (3)}\), (d) 2D approximate solutions for \(\alpha =1,\frac{1}{2}\) and \(\frac{\ln (2)}{\ln (3)}\), (e) Absolute error \(E_{10}(v(x,t))=|v_{\mathrm{ext}.}(x,t)-v_{\mathrm{appr}.}(x,t)|\) for \(\alpha =1\), (f) Absolute error \(E_{20}(v(x,t))=|v_{\mathrm{ext}.}(x,t)-v_{\mathrm{appr}.}(x,t)|\), \(\alpha =1\), (g) Absolute error of the LFHAM \(E_{10}(v(x,t))=|v_{\mathrm{ext}.}(x,t)-v_{\mathrm{appr}.}(x,t)|\) when \(\alpha =\frac{\ln (2)}{\ln (3)}\), (h) Absolute error of the LFHAM \(E_{20}(v(x,t))=|v_{\mathrm{ext}.}(x,t)-v_{\mathrm{appr}.}(x,t)|\) when \(\alpha =\frac{\ln (2)}{\ln (3)}\)
Example 2
Consider the following non-homogeneous local fractional heat conduction equation:
subject to the initial condition
According to the procedure of the LFHAM and based on Eq. (61) and Eq. (62), it is natural to choose \(v_{0}(x,t)=\sin _{\alpha }(x ^{\alpha })\).
Let us choose the linear operator as follows:
with the property \(\textit{\pounds}_{\alpha }[C]=0\), where C is an integral constant.
We define the nonlinear operator:
We construct the zero-order deformation equation as follows:
Obviously, when \(p=0\) and \(p=1\),
Then the Mth-order deformation equation is defined as follows:
where
Putting \(H(x,t)=1\) and applying the local fractional integral on the Mth-order deformation Eq. (67), we obtain
Then Eq. (69) yields
Hence
and so on.
Setting the convergence-control parameter \(\hslash =-1\), the series solution of Eq. (61) is given by
The results obtained in Eq. (71) were in complete agreement with the local fractional homotopy perturbation method [56].
Figures 2: Surface solution of Eq. (61) for \(\alpha =1\) is given in Fig. 2(a). Surface solution behavior of Eq. (61) for (\(\alpha =\frac{1}{2}\)) is presented in Fig. 2(b). The non-differentiable surface solution behavior is depicted in Fig. 2(c). The 2D surface solution behavior for different values of \(\alpha =1,\frac{1}{2},\frac{ \ln (2)}{\ln (3)}\) is presented in Fig. 2(d). The absolute error analysis for 10th and 20th-order approximations of the LFHAM is given in Fig. 2(e) and Fig. 2(f), respectively. The 10th and 20th-order absolute error analysis of the non-differentiable problem for \(\alpha =\frac{\ln (2)}{\ln (3)}\) is presented in Fig. 2(g) and Fig. 2(h), respectively.

(a) Numerical simulation of Eq. (61) for \(\alpha =1\), (b) 3D surface solution for \(\alpha =\frac{1}{2}\), (c) 3D non-differentiable surface solution behavior for \(\alpha =\frac{\ln (2)}{\ln (3)}\), (d) 2D approximate solutions for \(\alpha =1,\frac{1}{2}\) and \(\frac{\ln (2)}{\ln (3)}\), (e) Absolute error \(E_{10}(v(x,t))=|v_{\mathrm{ext}.}(x,t)-v_{\mathrm{appr}.}(x,t)|\), \(\alpha =1\), (f) Absolute error \(E_{20}(v(x,t))=|v_{\mathrm{ext}.}(x,t)-v_{\mathrm{appr}.}(x,t)|\) (g) Absolute error of the LFHAM \(E_{10}(v(x,t))=|v_{\mathrm{ext}.}(x,t)-v_{\mathrm{appr}.}(x,t)|\) for \(\alpha =\frac{\ln (2)}{\ln (3)}\), (h) Absolute error of the LFHAM \(E_{20}(v(x,t))=|v_{\mathrm{ext}.}(x,t)-v_{\mathrm{appr}.}(x,t)|\) for \(\alpha =\frac{\ln (2)}{\ln (3)}\)
Example 3
Consider the following nonlinear local fractional convection-diffusion equation:
subject to the initial condition
Based on Eq. (72) and the initial condition Eq. (73), it is natural to choose \(v_{0}(x,t)=E_{\alpha }(x^{\alpha })\) to be the initial guess.
Let us choose the linear operator as follows:
with the property \(\textit{\pounds}_{\alpha }[C]=0\), where C is an integral constant.
We define the nonlinear operator:
We construct the zero-order deformation equation as follows:
Obviously, when \(p=0\) and \(p=1\),
Then the Mth-order deformation equation is defined as follows:
where
Putting \(H(x,t)=1\) and applying the local fractional integral on the Mth-order deformation Eq. (78), we deduce
For \(m=1\), Eq. (80) yields
And for \(m\geq 2\), Eq. (80) yields
Thus
and so on.
Then, choosing the convergence-control parameter \(\hslash =-1\), the series solutions of Eq. (72) are given by
The result obtained in Eq. (83) is the same as that of the local fractional homotopy analysis method [56].
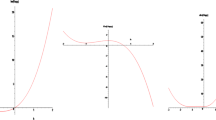
Figures 3: The surface solution behavior of Eq. (72) for \(\alpha =1\) is presented in Fig. 3(a). Surface solution behavior of Eq. (72) for (\(\alpha =\frac{1}{2}\)) is illustrated in Fig. 3(b). The non-differentiable surface solution behavior for \(\alpha =\frac{\ln (2)}{\ln (3)}\) is depicted in Fig. 3(c). 2D surface solutions for different values of \(\alpha =1,\frac{1}{2},\frac{\ln (2)}{ \ln (3)}\) are presented in Fig. 3(d). The absolute error analysis for 10th and 20th-order approximations of the LFHAM is given in Fig. 3(e) and Fig. 3(f), respectively. The 10th and 20th-order absolute error analysis of the non-differentiable problem for \(\alpha =\frac{\ln (2)}{\ln (3)}\) is depicted in Fig. 3(g) and Fig. 3(h), respectively.

(a) Numerical solution of Eq. (72) for \(\alpha =1\), (b) 3D surface solution for \(\alpha =\frac{1}{2}\), (c) Non-differentiable surface solution behavior for \(\alpha =\frac{\ln (2)}{\ln (3)}\), (d) Approximate solutions for \(\alpha =1,\frac{1}{2}\) and \(\frac{\ln (2)}{\ln (3)}\), (e) Absolute error \(E_{10}(v(x,t))=|v_{\mathrm{ext}.}(x,t)-v_{\mathrm{appr}.}(x,t)|\), \(\alpha =1\), (f) Absolute error \(E_{20}(v(x,t))=|v_{\mathrm{ext}.}(x,t)-v_{\mathrm{appr}.}(x,t)|\), \(\alpha =1\), (g) Absolute error of the LFHAM \(E_{10}(v(x,t))=|v_{\mathrm{ext}.}(x,t)-v_{\mathrm{appr}.}(x,t)|\) for \(\alpha =\frac{\ln (2)}{\ln (3)}\), (h) Absolute error of the LFHAM \(E_{20}(v(x,t))=|v_{\mathrm{ext}.}(x,t)-v_{\mathrm{appr}.}(x,t)|\) for \(\alpha =\frac{\ln (2)}{\ln (3)}\)
5 Conclusion
In this paper, we introduced a modified version of the well-known homotopy analysis method (HAM) called the local fractional homotopy analysis method (LFHAM) for solving non-differential models arising on Cantor sets. The suggested method was successfully applied to some non-differentiable problems, and the results obtained were entirely in agreement with the results of the existing methods. It is further shown that when the nonzero convergence-control parameter \(\hslash =-1\), the results of the local fractional homotopy perturbation method (LFHPM) are recovered as a particular case of the proposed technique. The most significant advantage of this technique over the existing methods is not only the highest degree of freedom to adjust and control the convergence of the series solutions, but also the great privilege to choose the initial approximation, the deformation-functions, and the auxiliary linear operator. Thus, we conclude that the LFHAM is a powerful semi-analytical technique for solving non-differentiable partial differential equations and can be regarded as a modification of the homotopy analysis method.
References
Odibat, Z., Momani, S., Xu, H.: A reliable algorithm of homotopy analysis method for solving nonlinear fractional differential equations. Appl. Math. Model. 34, 593–600 (2010)
Ganjiani, M.: Solution of nonlinear fractional differential equations using homotopy analysis method. Appl. Math. Model. 34, 1634–1641 (2010)
Jafari, H., Seifi, S.: Homotopy analysis method for solving linear and nonlinear fractional diffusion equation. Commun. Nonlinear Sci. Numer. Simul. 14, 2006–2012 (2009)
Algahtani, O.J.J.: Comparing the Atangana–Baleanu and Caputo–Fabrizio derivative with fractional order: Allen Cahn model. Chaos Solitons Fractals 89, 552–559 (2016)
Atangana, A.: On the new fractional derivative and application to nonlinear Fisher’s reaction-diffusion equation. Appl. Math. Comput. 273, 948–956 (2016)
Kumar, D., Singh, J., Baleanu, D.: A new analysis for fractional model of regularized long-wave equation arising in ion acoustic plasma waves. Math. Methods Appl. Sci. 40(15), 5642–5653 (2017). https://doi.org/10.1002/mma.4414
Mandelbrot, B.B., Van Ness, J.W.: Fractional Brownian motions, fractional noises and applications. SIAM Rev. 10, 422–437 (1968)
Atangana, A., Gomez-Aguilar, J.F.: Numerical approximation of Riemann–Liouville definition of fractional derivative: from Riemann–Liouville to Atangana–Baleanu. Numer. Methods Partial Differ. Equ. 34(5), 1502–1523 (2018). https://doi.org/10.1002/num.22195
Prodanov, D.: Fractional velocity as a tool for the study of non-linear problems. Fractal Fract. 2(4), 1–23 (2018)
Maitama, S.: An efficient technique for solving linear and nonlinear fractional partial differential equations. Math. Eng. Sci. Aerosp. 8(4), 521–534 (2017)
Maitama, S., Abdullahi, I.: A new analytical method for solving linear and nonlinear fractional partial differential equations. Prog. Fract. Differ. Appl. 2(4), 247–256 (2016)
Jumarie, G.: Fractional master equation: non-standard analysis and Liouville–Riemann derivative. Chaos Solitons Fractals 12, 2577–2587 (2001)
Jumarie, G.: On the representation of fractional Brownian motion as an integral with respect to \((dt)^{a}\). Appl. Math. Lett. 18, 739–748 (2005)
Yang, X.J.: Local Fractional Functional Analysis and Its Applications. Asian Academic, Hong Kong (2011)
Yang, X.J.: Local Fractional Calculus and Its Applications. World, New York (2012)
Yang, A.M., Zhang, Y.Z., Cattani, C., Xie, G.N., Rashidi, M.M., Zhou, Y.J., Yang, X.J.: Application of local fractional series expansion method to solve Klein–Gordon equations on Cantor sets. Abstr. Appl. Anal. 2014(2014), 1 (2014)
Hemeda, A.A., Eladdad, E.E., Lairje, I.A.: Local fractional analytical methods for solving wave equations with local fractional derivative. Math. Methods Appl. Sci. 41(6), 2515–2529 (2018). https://doi.org/10.1002/mma.4756
Yang, X.J., Tenreiro, J.A.M., Baleanu, D., Gao, F.: A new numerical technique for local fractional diffusion equation in fractal heat transfer. J. Nonlinear Sci. Appl. 9, 5621–5628 (2016)
Hu, M.-S., Agarwal, R.P., Yang, X.J.: Local fractional Fourier series with applications to wave equation in fractal vibrating string. Abstr. Appl. Anal. 2012, Article ID 567401 (2012)
Zhao, D., Singh, J., Kumar, D., Rathore, S., Yang, X.J.: An efficient computational technique for local fractional heat conduction equation in fractal media. J. Nonlinear Sci. Appl. 10, 1478–1486 (2017)
Wang, S.Q., Yang, Y.J., Kamil, H.J.: Local fractional function decomposition method for solving inhomogeneous wave equations with local fractional derivative. Abstr. Appl. Anal. 2014(2014), 1 (2014)
Chen, Y., Yan, Y., Zhang, K.: On the local fractional derivative. J. Math. Anal. Appl. 362, 17–33 (2010)
Yang, X.J., Baleanu, D., Zhong, W.P.: Approximate solutions for diffusion equations on Cantor space-time. Proc. Rom. Acad., Ser. A 14, 127–133 (2013)
Golmankhaneh, A.K., Yang, X.J., Baleanu, D.: Einsten field equations within local fractional calculus. Rom. J. Phys. 60, 22–31 (2015)
Singh, J., Kumar, D., Nieto, J.J.: A reliable algorithm for local fractional Tricomi equation arising in fractal transonic flow. Entropy 18, 1–8 (2016)
Yang, X.J., Srivastava, H.M., He, J.H., Baleanu, D.: Cantor-type cylindrical-coordinate fractional derivatives. Proc. Rom. Acad., Ser. A 14, 127–133 (2013)
Yang, X.J., Kang, Z., Liu, C.: Local fractional Fourier’s transform based on local fractional calculus. In: The 2010 ICECE 2010, IEEE Computer Society, pp. 1242–1245 (2010)
Yang, X.J.: Local fractional Laplace transform based on the local fractional calculus. In: Shen, G., Huang, X. (eds.) Advanced Research on Computer Science and Information Engineering (Communications in Computer and Information Science, vol. 153. Springer, Berlin (2011)
Liu, K., Hu, R.J., Cattani, C., Xie, G.N., Yang, X.J., Zhao, Y.: Local fractional Z-transforms with applications to signals on Cantor sets. Abstr. Appl. Anal. 2013, Article ID 638648 (2014)
Srivastava, H.M., Golmankhaneh, A.K., Baleanu, D., Yang, X.J.: Local fractional Sumudu transform with application to IVPs on Cantor sets. Abstr. Appl. Anal. 2014, Article ID 176395 (2014)
Kolwankar, K.M., Gangal, A.D.: Hölder exponents of irregular signals and local fractional derivatives. Pramana J. Phys. 48, 49–68 (1997)
Kolwankar, K.M., Gangal, A.D.: Local fractional Fokker–Planck equation. Phys. Rev. Lett. 80, 214–217 (1998)
Kolwankar, K.M., Gangal, A.D.: Fractional differentiability of nowhere differentiable functions and dimensions. Chaos 6, 505–513 (1996)
Jafari, H., Tajadodi, H., Johnston, S.J.: A decomposition method for solving diffusion equation via local fractional time derivative. Therm. Sci. 19(1), S123–S129 (2015)
Kumar, D., Singh, J., Mehmet, H.B., Bulut, H.: An effective computational approach to local fractional telegraph equations. Nonlinear Sci. Lett. A 8(2), 200–206 (2017)
Kumar, D., Singh, J., Baleanu, D.: A hybrid computational approach for Klein–Gordon equations on Cantor sets. Nonlinear Dyn. 87, 511–517 (2017)
Yang, X.J., Baleanu, D., Srivastava, H.M.: Local Fractional Integral Transforms and Their Applications. Academic Press, San Diego (2015)
Baleanu, D., Güvenc, Z.B., Machado, J.A.T.: New Trends in Nanotechnology and Fractional Calculus Applications. Springer, Berlin (2010)
Oldham, K.B., Spanier, J.: The Fractional Calculus. Acadamic Press, New York (1974)
Alsead, A., Baleanu, D., Eternad, S., Rezapour, S.: On coupled system of time-fractional differential problem by using a new fractional derivative. J. Funct. Spaces 2016, 466940 (2016)
Caputo, M., Fabrizio, M.: A new definition of fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 2, 731–785 (2015)
Atangana, A., Koca, I.: New direction in fractional differentiation. Math. Nat. Sci. 1, 18–25 (2017)
Atangana, A., Baleanu, D.: New fractional derivatives with nonlocal and non-singular kernel: theory and application to heat transfer model. Therm. Sci. 20, 763–769 (2016)
Kumar, D., Singh, J., Baleanu, D.: A new analysis of the Fornberg–Whitham equation pertaining to a fractional derivative with Mittag-Leffler type kernel. Eur. Phys. J. Plus 133(70), 1–10 (2018)
Kumar, D., Singh, J., Baleanu, D., Baleanu, S.: Analysis of regularized long-wave equation associated with a new fractional operator with Mittag-Leffler type kernel. Physica A 492, 155–167 (2018)
Singh, J., Kumar, D., Baleanu, D., Rathore, S.: On the local fractional wave equation in fractal strings. Math. Methods Appl. Sci. 1–8 (2019). https://doi.org/10.1002/mma.5458
Atangana, A., Owolabi, K.: New numerical approach for fractional differential equations. Math. Model. Nat. Phenom. 13, 1–21 (2018)
Srivastava, H.M., Saad, K.M.: Some new models of the time-fractional gas dynamics equation. Adv. Math. Model. Appl. 3(1), 5–17 (2018)
Kumar, D., Singh, J., Baleanu, D., Rathore, S.: Analysis of a fractional model of the Ambartsumian equation. Eur. Phys. J. Plus 133, 259 (2018)
Kumar, D., Singh, J., Purohit, S.D., Swroop, R.: A hybrid analytical algorithm for nonlinear fractional wave-like equations. Math. Model. Nat. Phenom. 14, 304 (2019)
Singh, J., Kumar, D., Baleanu, D.: New aspects of fractional Biswas–Milovic model with Mittag-Leffler law. Math. Model. Nat. Phenom. 14(3), 1–23 (2019)
Nayfeh, A.H.: Perturbation Methods. Wiley, New YorK (2000)
Jassim, H.K.: Local fractional Laplace decomposition method for nonhomogeneous heat equation arising in fractal heat flow with local fractional derivative. Int. J. Adv. Appl. Math. Mech. 2, 1–7 (2015)
Yan, S.P., Jafari, H., Jassim, H.K.: Local fractional Adomian decomposition and function decomposition methods for Laplace equation within local fractional operators. Adv. Math. Phys. 2014(2014), 1–8 (2014)
Yang, X.J., Srivastava, H.M., Cattani, C.: Local fractional homotopy perturbation method for solving fractional partial differential equations arising in mathematical physics. Rom. Rep. Phys. 67, 752–761 (2015)
Zhang, Y., Cattani, C., Yang, X.J.: Local fractional homotopy perturbation method for solving non-homogeneous heat conduction equations in fractal domains. Entropy 17, 6753–6764 (2015)
Yang, X.J., Baleanu, D., Yang, X.J.: A local fractional variational iteration method for Laplace equation within local fractional operators. Abstr. Appl. Anal. 2013, Article ID 202650 (2013)
Yang, A.M., Li, J., Srivastava, H.M., Xie, G.N., Yang, X.J.: Local fractional variational iteration method for solving linear partial differential equation with local fractional derivative. Discrete Dyn. Nat. Soc. 2014, Article ID 365981 (2014)
Jafari, H., Kamil, H.J.: Local fractional variational iteration method for solving nonlinear partial differential equations within local fractional operators. Appl. Appl. Math. 10(2), 1055–1065 (2015)
Jafari, H., Ünlü, C., Moshoa, S.P., Khalique, C.M.: Local fractional Laplace variational iteration method for solving diffusion and wave equations on Cantor sets within local fractional operators. Entropy 2015, Article ID 309870 (2015)
Ziane, D., Baleanu, D., Belghaba, K., Cherif, M.: Local fractional Sumudu decomposition method for linear partial differential equations with local fractional derivative. J. King Saud Univ., Sci. 31(1), 83–88 (2019). https://doi.org/10.1016/j.jksus.2017.05.002
Maitama, S.: Local fractional natural homotopy perturbation method for solving partial differential equations with local fractional derivative. Prog. Fract. Differ. Appl. 4(3), 219–228 (2018)
Liao, S.J.: An approximate solution technique not depending on small parameters: a special example. Int. J. Non-Linear Mech. 30, 371–380 (1995)
Liao, S.J.: Beyond Perturbation: Introduction to the Homotopy Analysis Method. CRC Press, Boca Raton (2003)
Liao, S.J.: Comparison between the homotopy analysis method and homotopy perturbation method. Appl. Math. Comput. 169(2), 1186–1194 (2005)
Liao, S.J.: An optimal homotopy-analysis approach for strongly nonlinear differential equations. Commun. Nonlinear Sci. Numer. Simul. 362, 2003–2016 (2010)
Liao, S.J.: Homotopy Analysis Method in Nonlinear Differential Equations. Springer, Heidelberg (2012)
Marinca, V., Herisanu, N.: Application of optimal homotopy asymptotic method for solving nonlinear equations arising in heat transfer. Int. Commun. Heat Mass Transf. 35, 710–715 (2008)
Niu, Z., Wang, C.: A one-step optimal homotopy analysis method for nonlinear differential equations. Commun. Nonlinear Sci. Numer. Simul. 15, 2026–2036 (2010)
Motsa, S.S., Sibanda, P., Shateyi, S.: A new spectral homotopy analysis method for solving a nonlinear second order BVP. Commun. Nonlinear Sci. Numer. Simul. 15, 2293–2302 (2010)
Abbabandy, S., Magyari, E., Shivanian, E.: The homotopy analysis method for multiple solutions of nonlinear boundary value problems. Commun. Nonlinear Sci. Numer. Simul. 14, 3530–3536 (2009)
Singh, J., Kumar, D., Baleanu, D., Rathore, S.: An efficient numerical algorithm for the fractional Drinfeld–Sokolov–Wilson equation. Appl. Math. Comput. 335, 12–24 (2018)
Songxin, L., Jeffrey, D.J.: Comparison of homotopy analysis method and homotopy perturbation method through an evolution equation. Commun. Nonlinear Sci. Numer. Simul. 14(12), 4057–4064 (2009)
Bataineh, A.S., Noorani, M.S.M., Hashim, I.: Solutions of time-dependent Emden–Fowler type equations by homotopy analysis method. Phys. Lett. A 371, 72–82 (2007)
Van Gorder, R.A., Vajravelu, K.: Analytic and numerical solutions to the Lane–Emden equation. Phys. Lett. A 372, 6060–6065 (2008)
Hayat, T., Sajid, M.: On analytic solution for thin film flow of a fourth grade fluid down a vertical cylinder. Phys. Lett. A 361, 316–322 (2007)
Sajid, M., Hayat, T.: Comparison of HAM and HPM methods in nonlinear heat conduction and convection equations. Nonlinear Anal. (B) 9, 2290–2295 (2008)
Acknowledgements
The authors would like to thank the anonymous reviewers and the editors for their valuable suggestions and comments on this paper.
Funding
This research is partially supported by the National Natural Science Foundation of China (No. 11571206). The first author also acknowledges the financial support of China Scholarship Council (CSC) in Shandong University (CSC No. 2017GXZ025381).
Author information
Authors and Affiliations
Contributions
All authors contributed equally and significantly in writing this article. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
Here, we present some important results.
Definition 7
Let φ be a function of the homotopy-parameter p, then
is called the Mth-order homotopy-derivative of φ, where \(m\geq 0\) is an integer, and \(\varTheta _{m}\) is called the operator of the mth-order homotopy-derivative [67].
Theorem 2
For three arbitrary Maclaurin series
it holds
Proof
For the proof of Eq. (86) and Eq. (87), the reader should refer to Liao [67]. According to Leibnitz’s rule for derivative of product, it holds
Then, according to Eq. (84) and Eq. (88), we deduce
□
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Maitama, S., Zhao, W. Local fractional homotopy analysis method for solving non-differentiable problems on Cantor sets. Adv Differ Equ 2019, 127 (2019). https://doi.org/10.1186/s13662-019-2068-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-019-2068-6