
Abstract
A single species logistic model with Allee effect and feedback control
where β, r, a, b, and c are all positive constants, is for the first time proposed and studied in this paper. We show that, for the system without Allee effect, the system admits a unique positive equilibrium which is globally attractive. However, for the system with Allee effect, if the Allee effect is limited (\(\beta<\frac{b^{2}r^{2}}{ac(ac+br)}\)), then the system could admit a unique positive equilibrium which is locally asymptotically stable; if the Allee effect is too large (\(\beta>\frac{br}{ac}\)), the system has no positive equilibrium, which means the extinction of the species. The Allee effect reduces the population density of the species, which increases the extinction property of the species. The Allee effect makes the system “unstable” in the sense that the system could collapse under large perturbation. Numeric simulations are carried out to show the feasibility of the main results.
Similar content being viewed by others

1 Introduction
The aim of this paper is to investigate the dynamic behaviors of the following single species logistic model with Allee effect and feedback control:
where β, r, a, b, and c are all positive constants.
Gopalsamy and Weng [1] for the first time proposed the following single species feedback control ecosystem:
where \(a_{1}\), \(a_{2}\), c, a, b, and τ are all positive constants. By constructing some suitable Lyapunov functional, they showed that, under the assumption that \(a_{1}>a_{2}>0\) holds, the system admits a unique positive equilibrium. Also, in [1], under the assumption \(a_{1}=0\), the authors investigated the stability property of the positive equilibrium. For the case \(a_{1}=0\), Gong et al. [2] investigated the Hopf bifurcation of system (1.2). Recently, Li and He [3] also investigated the Hopf bifurcation of the following single-species food-limited system with feedback control:
There are also many scholars who argued that the non-autonomous case is more suitable. For example, Chen and Chen [4] investigated the almost periodic solution of the following single species feedback control system:
Chen [5] and Chen, Yang and Chen [6] studied the persistent property of the following single species feedback ecosystem:
In [6], by developing a new differential inequality, they showed that the system is always permanent.
Some scholars argued that the discrete ecosystem is more suitable in some case. For example, Fan and Wang [7] studied the persistent property of the following discrete single species feedback control ecosystem:
They showed that the system is always permanent. Recently, there have also been many scholars investigating the stability and partial extinction property of the ecosystem, one could refer to [2–26] and the references cited therein for more information on this direction.
On the other hand, the Allee effect, which describes a negative density dependence, the population growth rate is reduced at low population size, has recently being studied by many scholars ([27–31]). For example, Hüseyin Merdan [27] investigated the influence of the Allee effect on a Lotka–Volterra type predator–prey system. To do so, the author proposed the following predator–prey system without and with Allee effect:
where β is a positive constant, which describes the intensity of the Allee effect. Hüseyin Merdan showed that the system subject to an Allee effect takes a longer time to reach its steady-state solution, and the Allee effect reduces the population densities of both predator and prey at the steady-state.
Wu et al. [28] proposed the following two-species commensal symbiosis model with Holling type functional response and Allee effect on the second species:
where \(a_{i}\), \(b_{i}\), \(i=1,2\), p, β, and \(c_{1}\) are all positive constants, \(p\geq1\). They showed that the Allee effect has no influence on the final density of the species, and the unique positive equilibrium of system (1.9) is globally stable. However, their numeric simulations show that, as the Allee effect becomes stronger, the system takes much more time to reach its stable steady-state solution.
It came to our attention that, to this day, still no scholars have investigated the ecosystem with both Allee effect and feedback control. As we all know, the Allee effect is one of the most frequently seen phenomena since more and more species become endangered, and such kind of species have difficulties in finding mates, social dysfunction is present at small population sizes. On the other hand, the feedback control variable represents the harvesting of the human beings [1], which is one of the most important factors that leads to reduction of the amount of the species. Stimulated by the works mentioned above, in this paper, we propose and study the dynamic behaviors of system (1.1).
The paper is arranged as follows. In Sect. 2, we investigate the dynamic behaviors of system (1.1) without feedback control; and system (1.1) without Allee effect is studied in Sect. 3. We investigate the stability property of the equilibria of system (1.1) in Sect. 4. Section 5 presents some numerical simulations to show the feasibility of the main results. We end this paper by a brief discussion.
2 Dynamic behaviors of system (1.1) without feedback control
In this section, we consider the most simple case, i.e., the following single species system with Allee effect and without feedback control:
where r, β are all positive constants.
As far as system (2.1) is concerned, we have the following result.
Theorem 2.1
The unique positive equilibrium \(x^{**}=1\) of system (2.1) is globally attractive.
Proof
It is a direct corollary of Lemma 2.1 of Wu et al. [28], and we omit the detailed proof here. □
3 Dynamic behaviors of system (1.1) without Allee effect
Although Gopalsamy and Weng [1] gave the detailed analysis of the dynamic behaviors of system (1.2), for the sake of completeness and to compare system (1.1) with and without Allee effect, we will study the dynamic behaviors of system (1.1) without Allee effect, i.e., the following system:
where r, a, b, and c are all positive constants.
Now we are in the position to investigate the stability property of steady-state solutions of model (3.1). Define
The steady-state solutions of (3.1) are obtained by solving the equations \(f(x,y)=0\) and \(g(x,y)=0\). The model has two steady-state solutions: \(A(0,0)\) and \(B(x^{*},u^{*})\), where
Theorem 3.1
\(B(x^{*},u^{*})\) is locally asymptotically stable, \(A(0,0)\) is unstable.
Proof
The variation matrix of the continuous-time system (3.1) at an equilibrium solution \((x,u)\) is
Thus, at \(A(0,0)\)
The eigenvalues of \(J_{1}(0,0)\) are \(\lambda_{1}=r>0\), \(\lambda_{2}=-b<0\), hence, \(A(0,0)\) is unstable.
At \(B(x^{*},u^{*})\)
Note that
and
So that both eigenvalues of \(J(x^{*},u^{*})\) have negative real parts; consequently, this steady-state solution is locally asymptotically stable.
This ends the proof of Theorem 3.1. □
Theorem 3.1 shows that the positive equilibrium is locally asymptotically stable. One interesting issue is whether it is a globally stable one, we give an affirmative answer to this issue. Indeed, we have the following.
Theorem 3.2
The unique positive equilibrium \(B(x^{*},u^{*})\) of system (3.1) is globally asymptotically stable.
Proof
From Theorem 3.1 system (3.1) admits a unique locally stable positive equilibrium \(B(x^{*}, u^{*})\). Also, \(A(0,0)\) is unstable, and \(B(x^{*}, u^{*})\) is locally asymptotically stable. To ensure \(B(x^{*}, u^{*})\) is globally stable, we consider the Dulac function \(u_{1}(x,y)=x^{-1}y^{-1}\), then
By the Dulac theorem [32], there is no closed orbit in the area \(R_{2}^{+}\). So \(B(x^{*}, u^{*})\) is globally asymptotically stable. This completes the proof of Theorem 3.2. □
4 Dynamic behaviors of system (1.1)
Now let us consider the dynamic behaviors of system (1.1).
Define
The steady-state solutions of (1.1) are obtained by solving the equations \(f_{1}(x,u)=0\) and \(g_{1}(x,u)=0\). The model has two steady-state solutions: \(A_{1}(0,0)\) and \(B_{1}(x_{1}^{*},u_{1}^{*})\), where
Since we are interested in the positive steady-state solution, from now on, we assume that
Under assumption (4.3), system (1.1) admits a boundary equilibrium \(A_{1}(0,0)\) and a positive equilibrium \(B_{1}(x_{1}^{*},u_{1}^{*})\).
Concerned with the local stability property of the above two equilibria, we have the following.
Theorem 4.1
\(A_{1}(0,0)\) is unstable. Assume that one of the following conditions holds:
-
(1)
$$ \beta< \frac{b^{2}r^{2}}{ac(ac+2br)}; $$(4.4)
-
(2)
$$ \frac{b^{2}r^{2}}{ac(ac+2br)}< \beta< \frac{br}{ac} \quad \textit{and} \quad b>r; $$(4.5)
then \(B_{1}(x_{1}^{*},u_{1}^{*})\) is locally asymptotically stable.
Proof
The variation matrix of the continuous-time system (1.1) at an equilibrium solution \((x,u)\) is
where
Thus, at \(A_{1}(0,0)\)
The eigenvalues of \(J_{2}(0,0)\) are \(\lambda_{1}=0\), \(\lambda_{2}=-b<0\). Hence, the equilibrium solution \(A_{1}(0,0)\) is non-hyperbolic. To determine the stability property of this equilibrium, now let us consider the transformation \(x=X\), \(u=\frac{c}{b}X-\frac{1}{b}U\), then system (1.1) becomes
Hence, by Theorem 7.1 in Chapter 2 of [33], the boundary equilibrium \((0,0)\) of system (4.6) is saddle-node. Consequently, the equilibrium \(A_{1}(0,0)\) of system (1.1) is saddle-node, hence, it is unstable.
Now, let us consider the stability property of the positive equilibrium \(B(x_{1}^{*},u_{1}^{*})\) since
where
Noting that
then:
(1) If (4.4) holds, then
and so
that is,
consequently,
(2) If (4.5) holds,
and so
however,
Since \(\beta<\frac{br}{ac}\) and \(b>r\), it follows that
and so
The above analysis shows that, under the assumption of Theorem 4.1,
Also, by simple computation,
The characteristic equation of the variational matrix (4.7) is
It immediately follows from (4.9) and (4.10) that both eigenvalues of \(J_{2}(x_{1}^{*},u_{1}^{*})\) have negative real parts, and hence this steady-state solution is locally asymptotically stable.
This ends the proof of Theorem 4.1. □
5 Numerical simulations
Now let us consider the following two examples.
Example 5.1
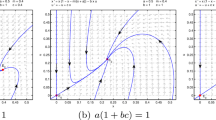
In this system, corresponding to system (1.1), we take \(r=1\), \(a=1\), \(b=2\), \(c=1\). Since \(b>r\), it follows from Theorem 4.1 that, for all \(\beta<\frac {br}{ac}=2\), system (5.1) always admits a unique positive equilibrium which is locally asymptotically stable. Figure 1 is the case \(\beta =0.2\). Now let us take \(\beta=0, 0.2\mbox{ and }0.5\), respectively, together with the initial condition \((x(0),u(0))=(0.5, 0.1)\), Fig. 2 shows that with the increase in the Allee effect (i.e., the increasing of β), the density of the species is decreasing.

Dynamic behaviors of system (5.1) with \(\beta=0.2\), the initial condition \((x(0), y(0))=(2,1)\), \((2, 0.5)\), \((0.1, 1)\), \((2,0.2)\), \((0.5,1)\), and \((1.5, 0.1)\), respectively

Dynamic behaviors of the first component of system (5.1) with the initial condition \((x(0), y(0))=(0.5,0.1)\)
Example 5.2
In this system, corresponding to system (1.1), we take \(r=1\), \(a=1\), \(b=1\), \(c=1\). It follows from Theorem 4.1(1) that, for all \(0\leq\beta<\frac {b^{2}r^{2}}{ac(ac+br)}=\frac{1}{2}\), system (5.2) always admits a unique positive equilibrium which is locally asymptotically stable. However, since \(b=r\), Theorem 4.1 could not give information about the case \(\frac{b^{2}r^{2}}{ac(ac+br)}=\frac{1}{2}<\beta<1=\frac{br}{ac}\). Let us take \(\beta=0.7\). In this case, system (5.2) has a unique positive equilibrium \((x^{*},u^{*})=(0.15, 0.15)\). Numeric simulation (Fig. 3) shows that the positive equilibrium is still locally asymptotically stable. Let us take \(\beta=2\), in this case, since \(\beta=2>\frac{br}{ac}\), the system has no positive equilibrium, which means that the species will be driven to extinction. Numeric simulation (Fig. 4) supports this assertion.

Dynamic behaviors of system (5.2) with \(\beta=0.2\), the initial condition \((x(0), y(0))=(2,1)\), \((2, 0.5)\), \((0.1, 1.5)\), \((2,0.2)\), \((0.5,1.5)\), and \((1.5, 0.1)\), respectively

Dynamic behaviors of system (5.2) with \(\beta=2\), the initial condition \((x(0), y(0))=(2,1)\), \((2, 0.5)\), \((0.1, 1)\), \((2,0.2)\), and \((0.5,1)\), respectively
6 Discussion
It is well known that the logistic equation
has a unique globally stable positive equilibrium \(x^{***}=1\). In Sect. 3, we added the feedback control variable to system (6.1), and this led to system (3.1). Note that in system (3.1) the unique positive equilibrium \(B(x^{*}, u^{*})\) is globally stable. Since
Theorems 3.1 and 3.2 show that, for the traditional logistic equation, the feedback control variable only changes the position of the positive equilibrium, and has no influence on the stability property of the positive equilibrium, i.e., the species will finally coexist in another stable state.
In Sect. 2, we added the Allee effect to system (6.1), and this led to system (2.1). Theorem 2.1 also shows that system (2.1) admits a unique positive equilibrium \(x^{**}=1\), which is globally stable. Hence, at first sight, the Allee effect has no influence on the dynamic behaviors of the single species logistic system. However, by further incorporating the feedback control variable to system (2.1), we finally arrive at system (1.1). We showed that:
-
(1)
To ensure that system (1.1) has positive steady-state, the Allee effect should be restricted so that the inequality
$$ \beta< \frac{br}{ac} $$(6.3)holds. If
$$ \beta>\frac{br}{ac} $$(6.4)holds, then system (1.1) has no positive equilibrium and, as it was shown in Fig. 4, the species will be driven to extinction.
-
(2)
By introducing the Allee effect, the boundary equilibrium \(A_{1}(0,0)\) of system (4.1) becomes non-hyperbolic. We could not judge its stability property by using the Jacobian matrix, and we have to develop some new analysis technique. Here, by transforming the system to the standard form, we could judge the stability property of the equilibrium by using Theorem 7.1 in Zhang et al. [33].
-
(3)
For
$$ \beta< \frac{b^{2}r^{2}}{ac(ac+2br)}, $$(6.5)we showed that system (1.1) also admits a unique positive equilibrium which is locally asymptotically stable. However, with the increase in the Allee effect, if the inequality
$$ \frac{b^{2}r^{2}}{ac(ac+2br)}< \beta< \frac{br}{ac} $$(6.6)holds, to ensure the positive equilibrium is locally asymptotically stable, we have to make some restriction on the feedback control variable, i.e., the inequality
$$ b>r $$(6.7)holds.
-
(4)
Note that the positive equilibrium \(B_{1}(x_{1}^{*}, u_{1}^{*})\) of system (1.1) takes the form
$$ x_{1}^{*}=\frac{br-a\beta c}{ac+br},\qquad u_{1}^{*}= \frac {c(br-a\beta c)}{b(ac+br)}. $$(6.8)Since
$$ \frac{dx_{1}^{*}}{d\beta}=-\frac{ac}{ac+br}< 0, $$(6.9)it follows that \(x_{1}^{*}\) is the strictly decreasing function of β, that is, the Allee effect reduces the population densities.
To sum up, the system incorporating the Allee effect becomes “unstable”: it becomes weak in the sense that it could not endure the large disturbance and the density of the species decreases with the Allee effect, which may accelerate the extinction of the species.
At the end of the paper, we would like to mention that from Example 5.2 we could conjecture that maybe condition
is enough to ensure system (1.1) admits a unique positive equilibrium which is locally asymptotically stable, or globally asymptotically stable. However, at present, we have difficulty in proving this conjecture, so we leave this for future study.
References
Gopalsamy, K., Weng, P.X.: Feedback regulation of logistic growth. Int. J. Math. Sci. 16(1), 177–192 (1993)
Gong, X., Xie, X., Han, R., et al.: Hopf bifurcation in a delayed logistic growth with feedback control. Commun. Math. Biol. Neurosci. 2015, Article ID 1 (2015)
Li, Z., He, M.: Hopf bifurcation in a delayed food-limited model with feedback control. Nonlinear Dyn. 76(2), 1215–1224 (2014)
Chen, X.X.: Almost periodic solutions of nonlinear delay population equation with feedback control. Nonlinear Anal., Real World Appl. 8(1), 62–72 (2007)
Chen, F.D.: Permanence of a single species discrete model with feedback control and delay. Appl. Math. Lett. 20, 729–733 (2007)
Chen, F.D., Yang, J.H., Chen, L.J.: Note on the persistent property of a feedback control system with delays. Nonlinear Anal., Real World Appl. 11, 1061–1066 (2010)
Fan, Y.H., Wang, L.L.: Global asymptotical stability of a logistic model with feedback control. Nonlinear Anal., Real World Appl. 11(4), 2686–2697 (2010)
Chen, L.J., Chen, L.J., Li, Z.: Permanence of a delayed discrete mutualism model with feedback controls. Math. Comput. Model. 50, 1083–1089 (2009)
Xu, J.B., Teng, Z.D.: Permanence for a nonautonomous discrete single-species system with delays and feedback control. Appl. Math. Lett. 23, 949–954 (2010)
Zhang, T.W., Li, Y.K., Ye, Y.: Persistence and almost periodic solutions for a discrete fishing model with feedback control. Commun. Nonlinear Sci. Numer. Simul. 16, 1564–1573 (2011)
Fan, Y.H., Wang, L.L.: Permanence for a discrete model with feedback control and delay. Discrete Dyn. Nat. Soc. 2008, Article ID 945109 (2008)
Wang, Y.: Periodic and almost periodic solutions of a nonlinear single species discrete model with feedback control. Appl. Math. Comput. 219(10), 5480–5486 (2013)
Chen, L., Chen, F.: Global stability of a Leslie–Gower predator–prey model with feedback controls. Appl. Math. Lett. 22(9), 1330–1334 (2009)
Yu, S.: Extinction for a discrete competition system with feedback controls. Adv. Differ. Equ. 2017, 9 (2017)
Chen, L.J., Sun, J.T.: Global stability of an SI epidemic model with feedback controls. Appl. Math. Lett. 28, 53–55 (2014)
Miao, Z., Chen, F., Liu, J., et al.: Dynamic behaviors of a discrete Lotka–Volterra competitive system with the effect of toxic substances and feedback controls. Adv. Differ. Equ. 2017, 112 (2017)
Han, R., Xie, X., Chen, F.: Permanence and global attractivity of a discrete pollination mutualism in plant–pollinator system with feedback controls. Adv. Differ. Equ. 2016, 199 (2016)
Chen, L.J., Chen, F.D.: Extinction in a discrete Lotka–Volterra competitive system with the effect of toxic substances and feedback controls. Int. J. Biomath. 8(1), 149–161 (2015)
Chen, X., Shi, C., Wang, Y.: Almost periodic solution of a discrete Nicholson’s blowflies model with delay and feedback control. Adv. Differ. Equ. 2016, 185 (2016)
Shi, C.L., Chen, X.Y., Wang, Y.Q.: Feedback control effect on the Lotka–Volterra prey–predator system with discrete delays. Adv. Differ. Equ. 2017, 373 (2017)
Shi, C., Li, Z., Chen, F.: Extinction in a nonautonomous Lotka–Volterra competitive system with infinite delay and feedback controls. Nonlinear Anal., Real World Appl. 13(5), 2214–2226 (2012)
Han, R., Chen, F., Xie, X., et al.: Global stability of May cooperative system with feedback controls. Adv. Differ. Equ. 2015, 360 (2015)
Li, Z., Han, M.H., Chen, F.D.: Influence of feedback controls on an autonomous Lotka–Volterra competitive system with infinite delays. Nonlinear Anal., Real World Appl. 14, 402–413 (2013)
Chen, F.D., Wang, H.N.: Dynamic behaviors of a Lotka–Volterra competitive system with infinite delay and single feedback control. J. Nonlinear Funct. Anal. 2016, Article ID 43 (2016)
Yang, K., Miao, Z., et al.: Influence of single feedback control variable on an autonomous Holling II type cooperative system. J. Math. Anal. Appl. 435, 874–888 (2016)
Han, R.Y., Chen, F.D.: Global stability of a commensal symbiosis model with feedback controls. Commun. Math. Biol. Neurosci. 2015, Article ID 15 (2015)
Merdan, H.: Stability analysis of a Lotka–Volterra type predator–prey system involving Allee effect. ANZIAM J. 52, 139–145 (2010)
Wu, R.X., Li, L., Lin, Q.F.: A Holling type commensal symbiosis model involving Allee effect. Commun. Math. Biol. Neurosci. 2018, Article ID 5 (2018)
Çelik, C., Duman, O.: Allee effect in a discrete-time predator–prey system. Chaos Solitons Fractals 90, 1952–1956 (2009)
Wang, J., Shi, J., Wei, J.: Predator–prey system with strong Allee effect in prey. J. Math. Biol. 62(3), 291–331 (2011)
Wang, W.X., Zhang, Y.B., Liu, C.Z.: Analysis of a discrete-time predator–prey system with Allee effect. Ecol. Complex. 8(1), 81–85 (2011)
Chen, L.S.: Mathematical Models and Methods in Ecology. Science Press, Beijing (1988) (in Chinese)
Zhang, Z.F., Ding, T.R., Huang, W.Z., Dong, Z.X.: Qualitative Theory of Differential Equation. Science Press, Beijing (1992) (in Chinese)
Acknowledgements
The author is grateful to anonymous referees for their excellent comments. This work is supported by the National Natural Science Foundation of China under Grant (11601085) and the Natural Science Foundation of Fujian Province (2017J01400).
Author information
Authors and Affiliations
Contributions
All authors contributed equally to the writing of this paper. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The author declares that there is no conflict of interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Lin, Q. Stability analysis of a single species logistic model with Allee effect and feedback control. Adv Differ Equ 2018, 190 (2018). https://doi.org/10.1186/s13662-018-1647-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-018-1647-2