
Abstract
In this article, nonlinear propagation of envelope gravity waves is studied in baroclinic atmosphere. The classical \((2+1)\) dimensional nonlinear Schrödinger (NLS) equation can be derived by using the multiple-scale, perturbation method. Further, via the semi-inverse method, the Euler–Lagrange equation and Agrawal’s method, the time–space fractional \((2+1)\) dimensional nonlinear Schrödinger (FNLS) equation is obtained to describe the envelope gravity waves. Furthermore, the conservation laws of time–space FNLS equation are discussed on the basis of Lie group analysis method. Finally, the exact solutions to the equation are given by employing the \(\exp(-\phi(\xi))\) method. The results demonstrate that the nonlinear effect caused by the fractional order leads to the change of the propagation characteristics of envelope gravity waves, the construction of fractional model has far-reaching significance for the research of nonlinear propagation of envelope gravity waves in actual atmospheric and ocean movement.
Similar content being viewed by others

1 Introduction
It is well known that envelope gravity waves play an important role in atmospheric dynamics [1–5], the troposphere is excited by convection, topography and other excitation processes to transfer energy and momentum from the source (e.g., mountains, thermal forcing) to the middle and upper atmosphere [6–9]. Atmospheric parameters, such as density and temperature, oscillate with fluctuations due to the influence of envelope gravity waves at the middle and upper atmosphere. In addition, the atmosphere is further achieved through the wave process of envelope gravity waves in actual atmospheric movement. Envelope gravity waves closely relate to the changes in the troposphere weather and climate, such as topographic precipitation, deep convection and typhoon rainstorms [10, 11].
The problem of propagation of nonlinear wave in plasma and fluid can be described by differential equations such as the KDV equation, the mKDV equation, the NLS equation, and the Boussinesq equation [12–20]. The NLS equation describes the time–space evolution of slow-changing envelopes, it has high theoretical value in quantum matters and has been extensively used in various branches of physics, such as optics, envelope gravity waves etc. [21, 22]. However, most of these studies are based on the integer-order model and the research on the fractional model is still relatively small. Fractional calculus is one of the best tools to investigate various scientific, engineering and mathematical models [23–25]. Numerous marine processes exhibit fractional dynamics, which are fractional systems. The use of fractional model can better reveal the nature of the phenomenon and behavior. Fractional calculus is the promotion of integral calculus. The study of fractional systems [26–31] has a more universal meaning. Thus we discuss the influence of fractional order for the propagation of envelope gravity waves by constructing the time–space fractional \((2+1)\) NLS equation.
Conservation laws are very important for the study of nonlinear physical phenomena, symmetry and conservation laws [32–35] provide much information as regards systems simulated by differential equations. Only a few scholars discuss the conservation laws of fractional partial differential equation, for example, the generalizations of Noether’s theorem [36], the new conservation theorem [37], the fractional generalized Noether operator [38], therefore, the conservation laws of the time–space nonlinear FPDES need further research. Moreover, there are many ways to solve differential equations such as the trial function method [39], the subequation method [40], the function variable method [41], the first integral method [42], etc. We can also get many other kinds of solutions, such as lump-soliton solutions [43–46], which are also very important.
The organization of the article is as follows: in Section 2, the integer-order model is derived by using the multiple-scale, perturbation method [47]. In Section 3, the fractional-order model is obtained by employing the semi-inverse method, Euler–Lagrange equation and Agrawal’s method [48, 49]. In Section 4, with the help of Lie group analysis method [50–52], the conservation laws of time–space FNLS equation will be discussed. In Section 5, we get the exact solutions to the above equation by using the \(\exp(-\phi(\xi))\) method [53]. In Section 6, some brief conclusions can be drawn.
2 Derivation of \((2+1)\) dimensional NLS equation
Starting with the basic dynamic equations of atmospheric motion, they can be written in the form
where \(\rho_{0}\) denotes the density; \(\theta_{0}\) is the temperature of the environmental flow field; \(\sigma=\frac{\partial\theta _{0}}{\partial z}\).
Introducing the dimensionless quantities
where the quantities with asterisk mean they are dimensionless.
Assuming \(D\sim H\), \(\frac{U}{fL} \sim o(1)\), \(\delta\theta=\frac {\delta UD}{fL} \) and substituting Eqs. (2) into Eqs. (1) yields
where we omit the subscript asterisks for simplicity, \(\epsilon=\frac {f^{2}}{N^{2}}\) and \(N^{2}=\frac{g\theta}{\theta_{0}}\) are the new parameters.
We suppose that the solution of Eq. (3) has the following form:
where U represents the speed of the basic flow, Θ indicates the temperature field and P denotes the air pressure.
We introduce the slow time and space scales for the purpose of addressing the effects of nonlinearity and amplitude modulation of space,
We introduce a new set of variables,
Substituting Eqs. (4), (5) and (6) into Eqs. (1) one acquires the lowest-order approximate equations of ϵ,
obviously, we will get
Further, the first-order approximate equations of ϵ will be obtained,
Eliminating the other variables except for \(p_{0}\) in Eqs. (9) yields the following equation:
where
Suppose Eq. (10) has the following solution in the form of separate variables:
where k represents the zonal wave number, ω indicates the frequency of the envelope gravity waves and A denotes a slowly varying envelope complex amplitude.
Therefore, other solutions to Eqs. (9) are also given
Next, the second-order approximate equations of ϵ will be given,
Substituting Eqs. (12) and (13) into Eqs. (14) one acquires
Similarly, eliminating the other variables except for \(p_{1}\) in Eqs. (14) leads to the following equation:
where
In addition, for Eq. (16) the following solution in the form of separate variables exists by analysis and assumptions:
Thus, other solutions to Eqs. (9) are also obtained
and the third-order approximate equations of ϵ will be written as
Then substitute Eqs. (18) and (19) into Eq. (20) and we can get the following forms by means of the secular-producing terms proportional to \(\exp[i(kx-\omega t)]\):
Meanwhile, eliminating the other variables except for \(p_{1}\) in Eq. (14) one obtains the following equation:
We adopt the following variable transformations:
and the \((2+1)\) NLS equation will be obtained,
where the coefficients are expressed as
According to [9], the corresponding transformation can be defined
so Eq. (24) is rewritten as follows:
3 Formulation of time–space fractional \((2+1)\) dimensional NLS equation
The semi-inverse method and the fractional variational principle are used to get the time–space fractional \((2+1)\) dimensional NLS equation as follows:
Defining a potential equation \(A(x,y,t)=u(x,y,t)+iv(x,y,t)\), where \(u(x,y,t)\) and \(v(x,y,t)\) indicate real functions of x, y and t, and the potential equation of the classical \((2+1)\) dimensional NLS equation (27) will be given,
Further, the system of two second-order equations can be represented in the following form:
We will construct a trial-functional with the help of the semi-inverse method for getting a variational principle for systems (29) and (30). Further, the system of two second-order equations can be represented in the following form:
where \(d\Omega=dx\,dy\,dt\) and \(H(u)\) is an unknown function consisting of the derivatives of u and u.
Considering the variation in Eq. (31) for u and we can get the Euler–Lagrange equation
where \(\frac{\delta H}{\delta u}\) means He’s variational differential [48] for u,
In order to make equation (32) satisfy equation (29), we set
and H can also be defined as follows:
Further, we will obtain the final variational principle
Substituting \(u=\frac{A+A^{*}}{2}\), \(v=i\frac{A-A^{*}}{2}\), where \(A^{*}\) expresses the complex conjugate of A and \(A^{*}=u-iv\), and we will obtain the following variational principle:
from which we can identify the Lagrangian of \((2+1)\) dimensional NLS equation,
Similarly, the Lagrangian of the time–space fractional \((2+1)\) dimensional NLS equation is written as
here the fractional derivative \(D^{\alpha}_{t}A\) shows the \(mRL\) fractional derivative defined in [54]
Next, the functional of the time–space fractional \((2+1)\) dimensional NLS equation can take the form
Moreover, we have the following definition [54, 55]:
Integrating by parts according to the above relation [54, 55],
Further, by optimizing the variation of the functional \(\delta J_{F}(A^{*})=0\), the Euler–Lagrange equation of the time–space fractional \((2+1)\) dimensional NLS equation can be written
Finally, substituting the Lagrange defined by Eq. (5) into the Euler–Lagrange formula, we can obtain the time–space fractional \((2+1)\) dimensional NLS equation
4 Conservation laws of time–space fractional \((2+1)\) dimensional NLS equation
In the section, we present a time–space FPDE with three independent variables,
Introducing an one-parameter Lie group for infinitesimal transformations,
where ξ, ζ, τ and η indicate infinitesimals and \(\epsilon\ll1\) means a group parameter.
The extended infinitesimals [56] can be written
where \(D_{t}\), \(D_{x}\) and \(D_{y}\) represent the total derivative operator defined in the following form:
Obviously, \(x_{1}=t\), \(x_{2}=x\), \(x_{3}=y\), \(A_{j}=\frac{\partial A}{\partial x_{j}}\) and \(A_{jk}=\frac{\partial^{2}}{\partial x_{j}\, \partial x_{k}}\).
On the basis of the generalized Leibnitz rule [57] and the generalization of the chain rule [58], we can get the expression of the extended symmetry operator \(\eta^{\alpha}_{t}\),
where
In the same way, the extended infinitesimal \(\eta^{2\beta}_{x}\) and \(\eta ^{2\gamma}_{y}\) can also be defined as
By the Lie symmetry theory, we will obtain the infinitesimal generator
The invariance criterion of system (46) can be given as follows:
where \(\Delta=G(x,y,t,A,D^{\alpha}_{t}A,D^{2\beta}_{x}A,D^{\gamma}_{y}A,\ldots)\).
The invariance condition leads to
Using the second prolongation to Eq. (45), the following invariance criterion is obtained:
Substituting (50), (52) and (53) into Eq. (57) yields the determining equations, from which we identify
With the help of Lie group analysis, we acquire the conservation laws of Eq. (45) defined by the following form:
where \(C_{t}\), \(C_{x}\) and \(C_{y}\) denote the conserved vectors.
A formal Lagrangian [59] for Eq. (45) is written as
where \(\omega(x,y,t)\) indicates a new dependent variable.
The adjoint equation of Eq. (45) is given by
where the expression of the Euler–Lagrange operator \(\frac{\delta }{\delta A}\) is defined as
Here \((D^{\alpha}_{t})^{*}\) means the adjoint operator of \(D^{\alpha}_{t}\).
In addition, \(W=\eta-\tau A_{t}-\xi A_{x}-\zeta A_{y}\) is the Lie characteristic functions, we get
According to the fractional generalizations of the Noether operators [38], the component of the conserved vector has the form
where \(J(\cdot)\) expresses the integral
Let us take \(W_{5}\) as an example to calculate the conservation laws of Eq. (45) by using the preceding formula,
5 Exact solutions of time–space fractional \((2+1)\) dimensional NLS equation
In this part, the \(\exp(-\phi(\xi))\) method will be applied to obtain the exact solutions to Eq. (45), as follows.
To begin with, consider the following fractional complex transformation:
where \(b_{1}\), \(b_{2}\) and \(b_{3}\) indicate constants defined later.
Thus, Eq. (45) can be transformed into the following differential equation [60]:
and the complex function A can be given,
where \(U(\xi)\) denotes the real function, we can get the following equation:
here \(c_{1}=b^{2}_{3}\), \(c_{2}=4a_{3}(a_{1}b^{2}_{1}-a_{2}b^{2}_{2})\), \(c_{3}=-4(a_{1}b^{2}_{1}-a_{2}b^{2}_{2})\).
For the purpose of balancing the highest-order derivative term and the nonlinear term of Eq. (45), it can be determined that \(n=1\), and the solutions of Eq. (72) are written
where \(d_{1}\) and \(d_{2}\) are constants and \(\exp(-\phi(\xi))\) satisfies the following equation:
Substituting Eq. (73) and Eq. (74) into Eq. (70) and extracting all the same power terms of \([\exp(-\phi(\xi))]^{j}\), \(j=-3,\ldots,0\), dividing the coefficients into zero one acquires a set of algebraic equations,
Further solving the above algebraic equations (75), we will get
Substituting Eq. (76) into Eq. (73) leads to
Finally, based on the above results, we can discuss solutions of different cases.
-
(I)
When \(\lambda^{2}-4\mu<0\) and \(\mu\neq0\), the trigonometric function solutions are written
$$ \begin{aligned}[b] A_{2}(x,y,t)={}&{\pm}\frac{\sqrt{\lambda^{2}+4\mu}c_{3}}{\exp [2(a_{2}b^{2}_{2}-a_{1}b^{2}_{1})]}\\&\times\xi\biggl(\frac{\lambda}{2\sqrt{c_{2}}}+ \frac{1}{\sqrt {c_{2}}}\frac{2\mu}{\sqrt{4\mu-\lambda^{2}}\tan(\frac{\sqrt{4\mu-\lambda ^{2}}}{2}(\xi+C))-\lambda}\biggr).\end{aligned} $$(78) -
(II)
When \(\lambda^{2}-4\mu>0\) and \(\mu\neq0\), the hyperbolic function solutions are written
$$ \begin{aligned}[b] A_{1}(x,y,t)={}&{\pm}\frac{\sqrt{\lambda^{2}+4\mu}c_{3}}{\exp [2(a_{2}b^{2}_{2}-a_{1}b^{2}_{1})]}\\&\times\xi\biggl(\frac{\lambda}{2\sqrt{c_{2}}}- \frac{1}{\sqrt {c_{2}}}\frac{2\mu}{\sqrt{\lambda^{2}-4\mu}\tanh(\frac{\sqrt{\lambda^{2}-4\mu }}{2}(\xi+C))+\lambda}\biggr).\end{aligned} $$(79) -
(III)
When \(\lambda^{2}-4\mu>0\) and \(\mu =0\), \(\lambda\neq0\), the hyperbolic function solutions are written
$$ \begin{aligned}[b] A_{3}(x,y,t)={}&{\pm}\frac{\sqrt{\lambda^{2}+4\mu}c_{3}}{\exp [2(a_{2}b^{2}_{2}-a_{1}b^{2}_{1})]}\\&\times\xi\biggl(\frac{\lambda}{2\sqrt{c_{2}}}+ \frac{1}{\sqrt {c_{2}}}\frac{\lambda}{\cosh(\lambda(\xi+C))+\sinh(\lambda(\xi+C))-1}\biggr).\end{aligned} $$(80) -
(IV)
When \(\lambda^{2}-4\mu=0\) and \(\mu\neq0\), \(\lambda\neq0\), the rational function solutions are written
$$ A_{4}(x,y,t)=\pm\frac{\sqrt{\lambda^{2}+4\mu}c_{3}}{\exp [2(a_{2}b^{2}_{2}-a_{1}b^{2}_{1})]}\xi\biggl(\frac{\lambda}{2\sqrt{c_{2}}}- \frac{1}{\sqrt {c_{2}}}\frac{\lambda^{2}(\xi+C)}{2(\lambda(\xi+C)+2)}\biggr). $$(81) -
(V)
When \(\lambda^{2}-4\mu=0\) and \(\mu=0\), \(\lambda=0\), the function solutions are written
$$ A_{5}(x,y,t)=\pm\frac{\sqrt{\lambda^{2}+4\mu}c_{3}}{\exp [2(a_{2}b^{2}_{2}-a_{1}b^{2}_{1})]}\xi\biggl(-\frac{1}{\sqrt{c_{2}}} \frac{1}{\xi+C}\biggr). $$(82)
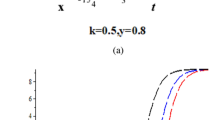
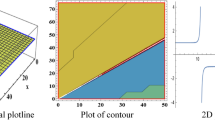
Adopting the \(\exp(-\phi(\xi))\) method, we get the exact solutions to the time–space fractional \((2+1)\) dimensional NLS equation. Based on Eq. (78), the following graphics are given (see Figures 1–7).







In the present numerical simulation, we draw some three-dimensional graphs of the exact solution (78). First we compare the effect of the fractional order on the solution at two different moments, \(t=2\) and \(t=3\), and At a certain moment \(t=3\), the change of solution is considered in the case of changing the fractional order of time and space. The behavior shows that the change of fractional order changes the nature of the solution and has a huge influence on the nonlinear propagation of the envelope gravity waves.
6 Conclusion
In this work, we first obtain the \((2+1)\) dimensional NLS equation for envelope gravity waves by using multiple-scale, perturbation method. The semi-inverse method is applied to get the Lagrangian of the \((2+1)\) dimensional NLS equation. Then the fractional Euler–Lagrange equation with the fractional variational principle is derived. Based on the modified Riemann–Liouville fractional derivative, we can have the time–space fractional \((2+1)\) dimensional NLS equation, which can better reflect the propagation characteristics of the envelope gravity wave and capture the nonlinear phenomenon in actual atmospheric movement. Using the Lie group analysis method, the conservation laws of the time–space fractional \((2+1)\) dimensional NLS equation are discussed in depth. By adopting the \(\exp(-\phi(\xi))\) method, we list the exact solutions to different cases. Taking one of the solutions as an example, we compare the effects of fractional order for the solution. After further research, we find that the fractional model is more practical and is a pioneering effort to find help for the study of actual atmospheric and ocean movement.
References
Crawford, D.R., Saffman, P.G., Yuen, H.C.: Evolution of a random inhomogeneous field of nonlinear deep-water gravity wave. Wave Motion 2, 1 (1980)
Jacobi, C., Gavrilov, N.M., Kurschner, D.: Gravity wave climatology and trends in the mesosphere/lower thermosphere region deduced from low-frequency drift measurements 1984–2003 (\(52.1^{\circ}\mathrm{N}, 13.2^{\circ}\mathrm{E}\)). J. Atmos. Sol.-Terr. Phys. 68, 1913 (2006)
Li, Z.L.: Solitary wave and periodic wave solutions for the thermally forced gravity waves in atmosphere. J. Phys. A, Math. Theor. 41, 1131 (2008)
Wang, M.: Solitary wave solutions for variant Boussinesq equations. Phys. Lett. A 199, 169 (1995)
Shi, Y., Yin, B., Yang, H.: Dissipative nonlinear Schrodinger equation for envelope solitary Rossby waves with dissipation effect in stratified fluids and its solution. Abstr. Appl. Anal. 2014, Article ID 643652 (2014)
Marchant, T.R., Smyth, N.F.: The extended Korteweg–de Vries equation and the resonant flow over topography. J. Fluid Mech. 221, 263 (1990)
Qiu, N., Su, X., Li, Z.: The Cenozoic tectono-thermal evolution of depressions along both sides of mid-segment of Tancheng–Lujiang Fault Zone, East China. Chin. J. Geophys. 50, 1309 (2007)
Fritts, D.C., Nastrom, G.D.: Sources of mesoscale variability of gravity waves. Part II: frontal, convective, and jet stream excitation. J. Atmos. Sci. 49, 111 (2010)
Liu, Y., Dong, H.H., Zhang, Y.: Solutions of a discrete integrable hierarchy by straightening out of its continuous and discrete constrained flows. Anal. Math. Phys. (2018). https://doi.org/10.1007/s13324-018-0209-9
Huang, F., Tang, X., Lou, S.Y., Lu, C.: Evolution of dipole-type blocking life cycle: analytical diagnoses and observations. J. Atmos. Sci. 64, 52 (2007)
Liu, P., Gao, X.N.: Symmetry analysis of nonlinear incompressible non-hydrostatic Boussinesq equations. Commun. Theor. Phys. 53, 609 (2010)
Kraenkel, R.A.: The reductive perturbation method and the Korteweg–de Vries hierarchy. Acta Appl. Math. 39, 389 (1995)
Johnson, R.S.: The classical problem of water waves: a reservoir of integrable and nearly-integrable equations. J. Nonlinear Math. Phys. 10, 72 (2003)
Abourabia, A.M.A., Mahmoud, M.A.M., Khedr, G.M.K.: Solutions of nonlinear Schrödinger equation for interfacial waves prop. Can. J. Phys. 87, 675 (2009)
Tao, M.S., Dong, H.H.: Algebro-geometric solutions for a discrete integrable equation. Discrete Dyn. Nat. Soc. 2017, Article ID 5258375 (2017)
Dong, H.H., Guo, B.Y., Yin, B.S.: Generalized fractional supertrace identity for Hamiltonian structure of NLS-MKdV hierarchy with self-consistent sources. Anal. Math. Phys. 6, 199 (2016)
Zhang, T., Meng, X., Zhang, T.: Global dynamics of a virus dynamical model with cell-to-cell transmission and cure rate. Comput. Math. Methods Med. 2015, Article ID 758362 (2015)
Yang, H.W., Chen, X., Guo, M., Chen, Y.D.: A new ZK-BO equation for three-dimensional algebraic Rossby solitary waves and its solution as well as fission property. Nonlinear Dyn. 91, 2019 (2018)
Dong, H.H., Zhang, Y., Zhang, Y.: Generalized bilinear differential operators, binary Bell polynomials, and exact periodic wave solution of Boiti–Leon–Manna–Pempinelli equation. Abstr. Appl. Anal. 2014, Article ID 738609 (2014)
Meng, X., Liu, R., Zhang, T.: Adaptive dynamics for a non-autonomous Lotka–Volterra model with size-selective disturbance. Nonlinear Anal., Real World Appl. 16, 202 (2014)
Johnson, R.S.: A Modern Introduction to the Mathematical Theory of Water Waves. Cambridge University Press, Cambridge (1997)
Wang, Z., Huang, X., Shi, G.: Analysis of nonlinear dynamics and chaos in a fractional order financial system with time delay. Comput. Math. Appl. 62, 1531 (2011)
Lu, C.N., Fu, C., Yang, H.W.: Time-fractional generalized Boussinesq equation for Rossby solitary waves with dissipation effect in stratified fluid and conservation laws as well as exact solutions. Appl. Math. Comput. 327, 104 (2018)
Cui, Y.: Uniqueness of solution for boundary value problems for fractional differential equations. Appl. Math. Lett. 51, 48 (2016)
Bai, Z., Zhang, S., Sun, S.: Monotone iterative method for fractional differential equations. Electron. J. Differ. Equ. 2016, Article ID 6 (2016)
Bai, Z., Dong, X., Yin, C.: Existence results for impulsive nonlinear fractional differential equation with mixed boundary conditions. Bound. Value Probl. 2016, Article ID 63 (2016)
Zou, Y., He, G.P.: On the uniqueness of solutions for a class of fractional differential equations. Appl. Math. Lett. 74, 68 (2017)
Bai, Z., Chen, Y.Q., Lian, H.: On the existence of blow up solutions for a class of fractional differential equations. Fract. Calc. Appl. Anal. 17, 1175 (2014)
Cui, Y., Zou, Y.: Existence results and the monotone iterative technique for nonlinear fractional differential systems with coupled four-point boundary value problems. Abstr. Appl. Anal. 2014, Article ID 242591 (2014)
Bai, Z., Sun, W.: Existence and multiplicity of positive solutions for singular fractional boundary value problems. Comput. Math. Appl. 63, 1369 (2012)
Bai, Z., Qiu, T.: Existence of positive solution for singular fractional differential equation. Appl. Math. Comput. 215, 2761 (2009)
Ma, W.X.: Conservation laws of discrete evolution equations by symmetries and adjoint symmetries. Symmetry 7, 714 (2015)
Dong, H.H., Zhang, Y., Zhang, X.: The new integrable symplectic map and the symmetry of integrable nonlinear lattice equation. Commun. Nonlinear Sci. Numer. Simul. 36, 354 (2016)
Guo, X.: On bilinear representations and infinite conservation laws of a nonlinear variable-coefficient equation. Appl. Math. Comput. 248, 531 (2014)
Tang, L.Y., Fan, J.C.: A family of Liouville integrable lattice equations and its conservation laws. Appl. Math. Comput. 217, 1907 (2010)
Frederico, G.S.F., Torres, D.F.M.: A formulation of Noethers theorem for fractional problems of the calculus of variations. J. Math. Anal. Appl. 334, 834 (2007)
Ibragimov, N.H.: A new conservation theorem. J. Math. Anal. Appl. 333, 311 (2007)
Lukashchuk, S.Y.: Conservation laws for time-fractional subdiffusion and diffusion-wave equations. Nonlinear Dyn. 80, 791 (2015)
Gurefe, Y., Misirli, E., Sonmezoglu, A., Ekici, M.: Extended trial equation method to generalized nonlinear partial differential equations. Appl. Math. Comput. 219, 5253 (2013)
Bekir, A., Aksoy, E.: A generalized fractional sub-equation method for nonlinear fractional differential equations. AIP Conf. Proc. 1611, 78 (2014)
Inc, M., Kilic, B.: Soliton structures of some generalized nonlinear dispersion evolution systems. Proc. Rom. Acad., Ser. A: Math. Phys. Tech. Sci. Inf. Sci. 16, 430 (2015)
Taghizadeh, N., Mirzazadeh, M., Farahrooz, F.: Exact solutions of the nonlinear Schrodinger equation by the first integral method. J. Math. Anal. Appl. 374, 549 (2011)
Yang, J.Y., Ma, W.X., Qin, Z.: Lump and lump-soliton solutions to the \((2+1)\)-dimensional Ito equation. Anal. Math. Phys. (2017). https://doi.org/10.1007/s13324-017-0181-9
Zhang, J.B., Ma, W.X.: Mixed lump-kink solutions to the BKP equation. Comput. Math. Appl. 74, 591 (2017)
Ma, W.X., Yong, X.L., Zhang, H.Q.: Diversity of interaction solutions to the \((2+1)\)-dimensional lto equation. Comput. Math. Appl. 75, 289 (2018)
Zhao, H.Q., Ma, W.X.: Mixed lump-kink solutions to the KP equation. Comput. Math. Appl. 74, 1399 (2017)
Luo, D.: Envelope solitary Rossby waves and modulational instabilities of uniform Rossby wave trains in two space dimensions. Wave Motion 24, 315 (1996)
He, J.H.: Variational principles for some nonlinear partial differential equations with variable coefficients. Chaos Solitons Fractals 19, 847 (2004)
Agrawal, O.P.: A general formulation and solution scheme for fractional optimal control problems. Nonlinear Dyn. 38, 323 (2004)
Gazizov, R.K., Kasatkin, A.A., Lukashchuk, S.Y.: Symmetry properties of fractional diffusion equations. Phys. Scr. T 136, 014016 (2009)
Lukashchuk, S.Y., Makunin, A.V.: Group classification of nonlinear time-fractional diffusion equation with a source term. Appl. Math. Comput. 257, 335 (2015)
Sahoo, S., Ray, S.S.: Analysis of Lie symmetries with conservation laws for the \((3+1)\) dimensional time-fractional mKdV-ZK equation in ion-acoustic waves. Nonlinear Dyn. 90, 1105 (2017)
Kaplan, M., Bekir, A.: A novel analytical method for time-fractional differential equations. Optik 127, 8209 (2016)
Jumarie, G.: Modified Riemann–Liouville derivative and fractional Taylor series of nondifferentiable functions further results. Comput. Math. Appl. 51, 1367 (2006)
Jumarie, G.: Table of some basic fractional calculus formulae derived from a modified Riemann–Liouville derivative for non-differentiable functions. Appl. Math. Lett. 22, 378 (2009)
Olver, P.J.: Applications of Lie groups to differential equations. Acta Appl. Math. 20, 312 (1990)
Kilbas, A.A.A., Srivastava, H.M., Trujillo, J.J.: Theory and Applications of Fractional Differential Equations. North-Holland Mathematics Studies, vol. 204. Elsevier, Amsterdam (2006)
Osler, T.J.: Leibnizruleforfractional derivatives generalized and an application to infinite series. SIAM J. Appl. Math. 18, 658 (1970)
Ma, W.X.: Conservation laws by symmetries and adjoint symmetries. Discrete Contin. Dyn. Syst., Ser. S 11, 707 (2018)
Ma, W.X., Chen, M.: Direct search for exact solutions to the nonlinear Schrodinger equation. Appl. Math. Comput. 215, 2835 (2009)
Acknowledgements
This work was supported by National Key Research, Development Program of China (No. 2017YFC1404000), the Science and Technology Plan Projects of Shandong Province Universities and Colleges (No. J15LI54), China Postdoctoral Science Foundation funded project (No. 2017M610436), CAS Interdisciplinary Innovation Team “Ocean Mesoscale Dynamical Processes and Ecological Effect”, Open Fund of the Key Laboratory of Meteorological Disaster of Ministry of Education (Nanjing University of Information Science and Technology) (No. KLME1507).
Author information
Authors and Affiliations
Contributions
The authors declare that the study was realized in collaboration with the same responsibility. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Fu, C., Lu, C.N. & Yang, H.W. Time–space fractional \((2+1)\) dimensional nonlinear Schrödinger equation for envelope gravity waves in baroclinic atmosphere and conservation laws as well as exact solutions. Adv Differ Equ 2018, 56 (2018). https://doi.org/10.1186/s13662-018-1512-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-018-1512-3