
Abstract
In this paper, we consider the problem of Mittag-Leffler stabilization of fractional-order nonlinear systems with unknown control coefficients. With the help of backstepping design method, the stabilizing functions and tuning functions are constructed. The controller is designed to ensure that the pseudo-state of the fractional-order nonlinear system converges to the equilibrium. The effectiveness of the proposed method has been verified by some simulation examples.
Similar content being viewed by others

1 Introduction
The concept of fractional differentiation appeared for the first time in a famous correspondence between L’Hospital and Leibniz, in 1695. Many mathematicians have further developed this area and we can mention the studies of Euler, Laplace, Abel, Liouville and Riemann. However, the fractional calculus remained for centuries a purely theoretical topic, with little if any connections to practical problems of physics and engineering. In recent years, the fractional calculus has been recognized as an effective modeling methodology for researchers [1]. As is well known, fractional calculus is a generalization of classical calculus to non-integer order. Compared with an integer-order system, a fractional-order system is a better option for engineering physics.
Fractional systems have been paid much attention to, for example, the fractional optimal control problems [2], stability analysis of Caputo-like discrete fractional systems [3, 4], fractional description of financial systems [5], fractional chaotic systems [6]. Especially, stabilization problem of fractional-order systems is a very interesting and important research topic. In recent years, more and more researchers and scientists have begun to address this problem [7–23]. With the help of the Lyapunov direct method, Mittag-Leffler stability and generalized Mittag-Leffler stability was studied [10, 20]. The Lyapunov direct method deals with the stability problem of fractional-order systems have been extended [11, 24]. Reference [25] studied the global Mittag-Leffler stability for a coupled system of fractional-order differential equations on network with feedback controls. Robust stability and stabilization of fractional-order interval systems with \(0<\alpha<1\) order have been studied [15]. Necessary and sufficient conditions on the asymptotic stability of the positivity continuous time fractional-order systems with bounded time-varying delays are investigated by the monotonic and asymptotic property [14]. The stabilization problem of a class of fractional-order chaotic systems have been addressed [12]. Pseudo-state stabilization problem of fractional-order nonlinear systems has attracted the attention of some researchers [7–9, 13, 16]. Moreover, any equilibrium of a general fractional-order nonlinear system described by either Caputo’s or Riemann-Liouville’s definition can never be finite-time stable was proved [26]. Finite-time fractional-order adaptive intelligent backstepping sliding mode control have been proposed to deal with uncertain fractional-order chaotic systems [27]. The time-optimal control problem for a class of fractional-order systems was proposed [28]. In addition, robust controller design problem for a class of fractional-order nonlinear systems with time-varying delays was investigated [29] and state feedback \(H_{\infty}\) control of commensurate fractional-order systems was studied [30].
Backstepping design method has been widely applied in stabilizing a general class of integer-order nonlinear systems. Backstepping design offers a choice of design tools for accommodation of uncertain nonlinearities [31]. It is well known that the backstepping design has been reported for nonlinear systems in strict-feedback form or triangular form [31–36]. Systematic design of globally stable and adaptive controllers for a class of parametric strict-feedback form are investigated by the backstepping design procedure [34]. The overparametrization and partial overparametrization problems were soon eliminated by elegantly introducing the tuning functions [33, 35]. On the other hand, with the aids of this frequency distribute model and the indirect Lyapunov method, the adaptive backstepping control of fractional-order systems were established [37–39]. As far as we know, there are few results on the generalization of backstepping into fractional-order systems. It was pointed out that the well-known Leibniz rule is not satisfied for fractional-order systems. Then an interesting question arises: when the states of system are not Leibniz rule, how to deal with the stabilization problem through design of tuning functions and adaptive feedback control law? So far, the stabilization problem of fractional-order nonlinear systems remains an open problem.
In this paper, we investigate the Mittag-Leffler stabilization problem of a class of fractional-order nonlinear systems. Compared with the existing results, the main contributions of this paper are as follows: (1) The backstepping design is extended to fractional-order nonlinear systems with unknown control coefficients, and an adaptive control scheme with tuning functions is proposed. It is proved that the stabilization problem of fractional-order nonlinear systems can be solved by the designed control scheme. (2) The Mittag-Leffler stabilization problem is achieved using a systematic design procedure and without any growth restriction on nonlinearities. (3) The controller is designed to ensure that the pseudo-state of the fractional-order system convergence to the equilibrium. (4) Successfully overcoming the difficulty of the fractional-order system without the Leibniz rule, and the tuning function is constructed to avoid overparameterization.
The remainder of this paper is organized as follows: Section 2 the problem formulation, some necessary concepts and some necessary lemmas are given. In Section 3, as the main part of this note, an adaptive controller and tuning functions are designed by using the backstepping method for fractional-order nonlinear systems. In Section 4, two numerical simulations are provided to illustrate the effectiveness of the proposed results. Finally, Section 5 concludes this study.
2 Problem formulation and preliminary results
In this paper, we consider the stabilization problem of the following nonlinear fractional systems:
where \(x=[x_{1},\ldots,x_{n}]^{T}\in R^{n}\), \(D^{q}\) is the Caputo fractional derivative of order \(0< q\leq1\), \(\theta\in R^{p}\) is an unknown constant parameter and \(b_{i},i=1,2,\ldots,n\), are unknown constants, called unknown control coefficients. \(u\in R\) is the control input, \(\varphi _{0}\), \(\beta_{0}\) and the components of \(\varphi_{i}\), \(1\leq i\leq n\) are smooth nonlinear functions in \(R^{n}\) and \(\beta_{0}(x)\neq0\) for all \(x\in R^{n}\).
Remark 1
It is worth pointing out that if let the unknown constants \(b_{i}=1\) (\(i=1,\ldots,n\)) and \(q=1\) in (1), the systems (1) reduces to the well-known parametric strict-feedback system. Moreover, if \(b_{i}=1\) (\(i=1,\ldots,n\)) and \(\varphi_{0}(x)\) is a constant, then system (1) will become the parametric strict-feedback form of fractional-order nonlinear system.
Definition 1
([40])
The fractional-order derivative \(D_{t}^{q}\) (\(q>0\)) of \(g(t)\) in Caputo sense is defined as
where \(n-1< q\leq n\in N\).
Remark 2
For simplicity, the symbol \(D^{q}\) is shorted for \({}^{C}_{t_{0}} D_{t}^{q}\), where t is the time.
-
(1)
If C is a constant, then \(D^{q} C=0\).
Similar to integer-order differentiation, fractional-order differentiation in Caputo’s sense is a linear operation:
-
(2)
\(D^{q}(\mu g(t)+\omega h(t))=\mu D^{q} g(t)+\omega D^{q} h(t)\),
where μ and ω are real numbers.
-
(3)
Leibniz rule:
$$D^{q}\bigl( g(t)h(t)\bigr)=\sum_{r=0}^{\infty} \frac{\Gamma(q+1)}{\Gamma(r+1)\Gamma (q-r+1)}D^{q-r}g(t)D^{r}h(t). $$
Note that the sum is infinite and contains integrals of fractional order for \(r>[q]+1\).
Remark 3
The well-known Leibniz rule \(D^{q}(fg) = (D^{q} f)g + f(D^{q} g)\) is not satisfied for differentiation of non-integer orders.
Lemma 1
([13])
Let \(V: D \rightarrow R\) be a continuous positive definite function defined on a domain \(D\subset R^{n}\) that contains the origin. Let \(B_{d} \subset D\) for some \(d > 0\). Then there exist class-K functions \(\gamma_{1}\) and \(\gamma_{2}\) defined on \([0,d]\), such that
for all \(x\in B_{d}\). If \(D=R^{n}\), the functions \(\gamma_{1}\) and \(\gamma_{2}\) will be defined on \([0,\infty)\).
Lemma 2
([7, 11] (Mittag-Leffler stability))
Let \(x(t)=0\) be the equilibrium point of the fractional-order system \(D^{q} x=f(x,t),x\in\Omega\), where Ω is neighborhood region of the origin. Assume that there exists a fractional Lyapunov function \(V(t,x(t)):[0,\infty)\times R^{n}\rightarrow R\) and class-K functions \(\gamma_{i},i=1,2,3\) satisfying
Then the fractional-order system is asymptotically Mittag-Leffler stable. Moreover, if \(\Omega=R^{n}\), the fractional-order system is globally asymptotically Mittag-Leffler stable.
Lemma 3
([24])
Let \(x(t)\in R\) be a real continuously differentiable function. Then, for any time instant \(t\geq t_{0}\),
Remark 4
In the case when \(x(t)\in R^{n}\), Lemma 3 is still valid. That is, \(\alpha\in(0,1)\) and \(t \geq t_{0}\), \(\frac {1}{2}D^{\alpha}x^{T}(t)x(t)\leq x^{T}(t)D^{\alpha}x(t)\). In addition, let \(x(t)\in R\) be a real continuously differentiable function. Then, for any \(p = 2^{n} , n \in N\), \(D^{\alpha}x^{p}(t)\leq px^{p-1}(t)D^{\alpha}x(t)\), where \(0<\alpha<1 \) (see [7]).
3 Backstepping design
In this section, we will give the backstepping design procedure of fractional-order systems.
Theorem 1
The fractional-order nonlinear system (1) can be asymptotically Mittag-Leffler stable by the adaptive feedback control
where \(\alpha_{1}(x_{1},\hat{\theta})=-\frac{c_{1}}{b_{1}}z_{1}-\frac{1}{b_{1}}\hat {\theta}^{T}\varphi_{1}(x_{1})\), and \(c_{1},c_{2},\ldots,c_{n}\) are positive constants. θ̂ is the estimate of the unknown parameter θ, \(\tilde{\theta}=\hat{\theta}-\theta\) and update laws
where \(\Gamma=\operatorname{diag}[p_{1},\ldots,p_{m}]>0\) is the gain matrix of the adaptive law.
Proof
The design procedure is recursive. Its ith-order subsystem is stabilized with respect to a Lyapunov function \(V_{i}\) by the design of a stabilizing function \(\alpha_{i}\) and a tuning function \(\tau_{i}\). The update law for the parameter estimate θ̂ and the feedback control u are designed at the final step.
Step 1: Let \(z_{1} =x_{1}\) and \(z_{2}=x_{2}-\alpha_{1}\), we rewrite \(D^{q} x_{1}=b_{1}x_{2} + \theta^{T}\varphi_{1}(x_{1})\) as
Choose a Lyapunov function candidate as \(V_{1}=\frac{1}{2}z_{1}^{2}+\frac {1}{2}\tilde{\theta}^{T}\Gamma^{-1}\tilde{\theta}\), where \(\tilde{\theta }=\hat{\theta}-\theta\) is the parameter estimate error. We have
where
To make \(D^{q} V_{1}\leq- c_{1}z_{1}^{2}\), we would choose
However, we retain \(\tau_{1}\) as the first tuning function and \(\alpha_{1}\) as the first stabilizing function. We have
The second term \(b_{1}z_{1}z_{2}\) in \(D^{q}V_{1}\) will be canceled at the next step.
Substituting (11) into (8) yields
Step 2: Let \(z_{3} =x_{3} -\alpha_{2}\), we rewrite \(D^{q}x_{2} =b_{2}x_{3} + \theta ^{T}\varphi_{2}(x_{1},x_{2})\) as
Choose a Lyapunov function candidate as follows: \(V_{2} = V_{1} + \frac {1}{2}z_{2}^{2}\). We have
where
Then, to make \(D^{q}V_{2} \leq-c_{1} z_{1}^{2} -c_{2} z_{2}^{2}\), we would choose
However, we retain \(\tau_{2}\) as the second tuning function and \(\alpha _{2}\) as the second stabilizing function. The resulting \(D^{q}V_{2}\) is
The third term in \(D^{q}V_{2}\) will be canceled at the next step.
Substituting (17) into (14) yields
Step 3: Let \(z_{4} =x_{4}-\alpha_{3}\), we rewrite \(D^{q}x_{3} =b_{3}x_{4} + \theta ^{T}\varphi_{3}(x_{1},x_{2},x_{3})\) as
Choose a Lyapunov function as \(V_{3} = V_{2} + \frac{1}{2}z_{3}^{2}\). We have
where
Then, to make \(D^{q}V_{3} \leq-c_{1}z_{1}^{2}- c_{2}z_{2}^{2}-c_{3}z_{3}^{2}\), we would choose
However, we retain \(\tau_{3}\) as the third tuning function and \(\alpha_{3}\) as the third stabilizing function. The resulting \(D^{q}V_{3}\) is
Substituting (23) into (20) yields
Step i (\(i\geq2\)): Let \(z_{i+1} =x_{i+1}-\alpha_{i}\), we rewrite \(D^{q}x_{i} =b_{i}x_{i+1}+\theta^{T}\varphi_{i}(x_{1},\ldots,x_{i})\) as
Choose a Lyapunov function of the form \(V_{i}= V_{i-1} + \frac {1}{2}z_{i}^{2}\). Then
where
Then, to make \(D^{q}V_{i}\leq-\sum_{k=1}^{i}c_{k}z_{k}^{2}\), we would choose
However, we retain \(\tau_{i}\) as the ith tuning function and \(\alpha_{i}\) as the ith stabilizing function. The resulting \(D^{q}V_{i}\) is
Substituting (29) into (26) yields
Step n: With \(z_{n} =x_{n}- \alpha_{n-1}\), we rewrite \(D^{q}x_{n} =\varphi _{0}(x)+\theta^{T}\varphi_{n}(x)+b_{n}\beta_{0}(x)u\) as
and we now design the Lyapunov function as \(V_{n}= V_{n-1} + \frac {1}{2}z_{n}^{2}\); we have
To eliminate \(\hat{\theta} - \theta\) from \(D^{q}V_{n}\) we choose the update law
we rewrite \(D^{q}V_{n}\) as
Finally, we choose
We have
Substituting (36) into (32) yields
According to Lemma 1, for the Lyapunov function \(V_{n}\), there exist class-K functions \(\gamma_{1}\) and \(\gamma_{2}\) such that \(\gamma _{1}( \Vert \eta \Vert )\leq V_{n}(\eta)\leq\gamma_{2}( \Vert \eta \Vert )\) where \(\eta=[z_{1},\ldots,z_{n},\tilde{\theta}]\).
Unless \(z_{i}=0\), we have \(D^{q}V_{n}\leq0\), thus there exists a class-K function \(\gamma_{3}\) such that \(D^{q}V_{n}\leq-\gamma_{3}( \Vert \eta \Vert )\).
According to Lemma 2, the z-system is asymptotically Mittag-Leffler stable. □
Remark 5
In this paper, we constructed the virtual controllers and tuning functions to deal with the fractional stabilization problem, the backstepping technique has been extended to fractional-order systems. It should be noted that the Mittag-Leffler stability implies asymptotic stability [11]. Therefore, the Lyapunov direct method can be applied to obtain the asymptotical stability of the closed-loop system.
4 Simulation results
In this section, two examples are given to verify the effectiveness of the proposed scheme.
Example 1
We consider the following fractional-order nonlinear system:
where \(b_{1}=3\), \(\theta=2\), \(\varphi_{1}=2x_{1}^{2}\), \(\varphi _{3}=-x_{1}^{2}-x_{2}\sin(x_{1})\), \(\Gamma=1\) and we choose \(q=0.96\).
Step 1: Let \(z_{1} =x_{1}\) and \(z_{2}=x_{2}-\alpha_{1}\), we rewrite \(D^{q} x_{1}=3x_{2}+2x_{1}^{2} \) as
choose the Lyapunov function \(V_{1}=\frac{1}{2}z_{1}^{2}+\frac{1}{2}(\hat {\theta}-2)^{T}\Gamma^{-1}(\hat{\theta}-2)\). Then
where \(\tau_{1}=x_{1}^{3}\). Meanwhile, we choose
Then
The second term \(3z_{1}z_{2}\) in \(D^{q}V_{1}\) will be canceled at the next step.
Substituting (42) into (40) yields
Step 2: Since \(z_{2} =x_{2} -\alpha_{1}\), we have
Choose the Lyapunov function \(V_{2} = V_{1} + \frac{1}{2}z_{2}^{2}\). Then
Then, to make \(D^{q}V_{3} \leq-k_{1}z_{1}^{2}- k_{2}z_{2}^{2}\), we would choose
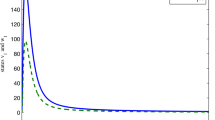
In this simulation, \(k_{1}=3\), \(k_{2}=2\). The results for the initial state condition \(x_{1}(0)=1, x_{2}(0)=-1\) are given in Figures 1-3.

The state trajectories \(\pmb{x_{1}, x_{2}}\) .

Control input u .

Parameter estimate θ .
Example 2
We consider the following fractional-order nonlinear system:
where \(b_{1}=b_{2}=1\), \(\theta=2\), \(\varphi_{1}(x_{1})=x_{1}^{2}\), \(\varphi _{2}(x_{1},x_{2})=x_{1}x_{2}\) and \(\Gamma=1\), we choose \(q=0.96\).
Step 1: Let \(z_{1} =x_{1}\) and \(z_{2}=x_{2}-\alpha_{1}\), we rewrite \(D^{q} x_{1}=x_{2} + 2x_{1}^{2}\) as
Choose the Lyapunov function \(V_{1}=\frac{1}{2}z_{1}^{2}+\frac{1}{2}(\hat {\theta}-2)^{T}(\hat{\theta}-2)\). Then
we choose
we arrive at
The second term \(z_{1}z_{2}\) in \(D^{q}V_{1}\) will be canceled at the next step. Notice that \(D^{q}z_{2} =D^{q}x_{2} - D^{q} \alpha_{1}\), that is,
Let \(z_{3}=x_{3}-\alpha_{2}\), choose a Lyapunov function as \(V_{2} = V_{1} + \frac {1}{2}z_{2}^{2}\). Then
where \(D^{q}\hat{\theta}=\tau_{2}=\tau_{1}-\frac{z_{2}}{\hat{\theta}-2}D^{q}(\hat {\theta}^{T}x_{1}^{2})\). Then, to make \(D^{q}V_{2} \leq-k_{1} z_{1}^{2} -k_{2} z_{2}^{2}+z_{2}z_{3}+(\hat{\theta}-2)^{T}(D^{q}\hat{\theta}-\tau_{2})\), we would choose
Choose the Lyapunov candidate function \(V_{3}=V_{2}+\frac{1}{2}z_{3}^{2}\). Then
where \(D^{q}\hat{\theta}=\tau_{3}=\tau_{2}-\frac{z_{3}}{\hat{\theta}-2}D^{q}(\hat {\theta}^{T}x_{1}x_{2})\), we choose
we obtain
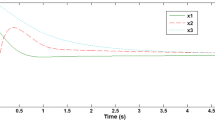
In this simulation, \(k_{1}=k_{2}=k_{3}=1\). The results for the initial state condition \(x_{1}(0)=1\), \(x_{2}(0)=-2\), \(x_{3}(0)=-1\) are given in Figures 4-6.

The state trajectories \(\pmb{x_{1}}\) , \(\pmb{x_{2}}\) , \(\pmb{x_{3}}\) .

Control input u .

Parameter estimate θ .
5 Conclusions
The problem of Mittage-Leffler stabilization has been investigated for a class of fractional-order nonlinear systems with the unknown control coefficients. The backstepping design scheme is extended to fractional-order systems, and an adaptive control law is proposed with fractional-order update laws to achieve an asymptotical Mittag-Leffler stabilization for the close-loop system, and the tuning function is constructed to avoid overparameterization. Finally, the effectiveness of the proposed method has been verified by some simulation examples.
References
Zhou, Y: Advances in fractional differential equations. III. Comput. Math. Appl. 64(10), 2965 (2012)
Baleanu, D, Jajarmi, A, Hajipour, M: A new formulation of the fractional optimal control problems involving Mittag-Leffler nonsingular kernel. J. Optim. Theory Appl. 175(3), 718-737 (2017)
Baleanu, D, Wu, GC, Bai, YR, Chen, FL: Stability analysis of Caputo-like discrete fractional systems. Commun. Nonlinear Sci. Numer. Simul. 48, 520-530 (2017)
Baleanu, D, Wu, GC, Zeng, SD: Chaos analysis and asymptotic stability of generalized Caputo fractional differential equations. Chaos Solitons Fractals 102, 99-105 (2017)
Hajipour, M, Jajarmi, A, Baleanu, D: An efficient non-standard finite difference scheme for a class of fractional chaotic systems. J. Comput. Nonlinear Dyn. 13(2), 021013 (2017)
Jajarmi, A, Hajipour, M, Baleanu, D: New aspects of the adaptive synchronization and hyperchaos suppression of a financial model. Chaos Solitons Fractals 99, 285-296 (2017)
Ding, DS, Qi, DL, Wang, Q: Non-linear Mittag-Leffler stabilisation of commensurate fractional-order non-linear systems. IET Control Theory Appl. 9(5), 681-690 (2015)
Ding, DS, Qi, DL, Meng, Y, Xu, L: Adaptive Mittag-Leffler stabilization of commensurate fractional-order nonlinear systems. In: Proceedings of 53rd IEEE CDC, pp. 6920-6926 (2014)
Ding, DS, Qi, DL, Peng, JM, Wang, Q: Asymptotic pseudo-state stabilization of commensurate fractional-order nonlinear systems with additive disturbance. Nonlinear Dyn. 81, 667-677 (2015)
Li, Y, Chen, YQ, Podlubny, I: Mittag-Leffler stability of fractional order nonlinear dynamic systems. Automatica 45, 1965-1969 (2009)
Li, Y, Chen, YQ, Podlubny, I: Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag-Leffler stability. Comput. Math. Appl. 59(5), 1810-1821 (2010)
Shukla, MK, Sharma, BB: Stabilization of a class of fractional order chaotic systems via backstepping approach. Chaos Solitons Fractals 98, 56-62 (2017)
Wang, Q, Zhang, JL, Ding, DS, Qi, DL: Adaptive Mittag-Leffler stabilization of a class of fractional order uncertain nonlinear systems. Asian J. Control 18(6), 2343-2351 (2016)
Shen, J, Lam, J: Stability and performance analysis for positive fractional-order systems with time-varying delays. IEEE Trans. Autom. Control 61(9), 2676-2681 (2016)
Lu, JG, Chen, YQ: Robust stability and stabilization of fractional-order interval systems with the fractional order α: the \(0<\alpha<1\) case. IEEE Trans. Autom. Control 55(1), 152-158 (2010)
Farges, C, Moze, M, Sabatier, J: Pseudo-state feedback stabilization of commensurate fractional order systems. Automatica 46(10), 1730-1734 (2010)
Li, Y, Chen, YQ, Podlubny, I: Reply to “Comments on ’Mittag-Leffler stability of fractional order nonlinear dynamic systems’ [Automatica 45(8) (2009) 1965-1969]”. Automatica 75, 330 (2017)
Chen, LP, He, YG, Chai, Y, Wu, RC: New results on stability and stabilization of a class of nonlinear fractional-order systems. Nonlinear Dyn. 75, 633-641 (2014)
Chen, LP, Wu, RC, Cao, JD, Liu, JB: Stability and synchronization of memristor-based fractional-order delayed neural networks. Neural Netw. 71, 37-44 (2015)
Yu, JM, Hu, H, Zhou, SB, Lin, XR: Generalized Mittag-Leffler stability of multi-variables fractional order nonlinear systems. Automatica 49, 1798-1803 (2013)
Trigeassou, JC, Maamri, N, Sabatier, J, Oustaloup, A: A Lyapunov approach to the stability of fractional differential equations. Signal Process. 91, 437-445 (2011)
Ke, YQ, Miao, CF: Mittag-Leffler stability of fractional-order Lorenz and Lorenz-family systems. Nonlinear Dyn. 83, 1237-1246 (2016)
Zhao, YG, Wang, YZ, Zhang, XF, Li, HT: Feedback stabilisation control design for fractional order non-linear systems in the lower triangular form. IET Control Theory Appl. 10(9), 1061-1068 (2016)
Aguila-Camacho, N, Duarte-Mermoud, MA, Gallegos, JA: Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 19(9), 2951-2957 (2014)
Li, HL, Hu, C, Jiang, YL, Zhang, L, Teng, ZD: Global Mittag-Leffler stability for a coupled system of fractional-order differential equations on network with feedback controls. Neurocomputing 214, 233-241 (2016)
Shen, J, Lam, J: Non-existence of finite-time stable equilibria in fractional-order nonlinear systems. Automatica 50(2), 547-551 (2014)
Bigdeli, N, Ziazi, HA: Finite-time fractional-order adaptive intelligent backstepping sliding mode control of uncertain fractional-order chaotic systems. J. Franklin Inst. 354, 160-183 (2017)
Wei, YH, Du, B, Cheng, SS, Wang, Y: Fractional order systems time-optimal control and its application. J. Optim. Theory Appl. 174(1), 122-138 (2017)
Hua, CC, Zhang, T, Li, YF, Guan, XP: Robust output feedback control for fractional order nonlinear systems with time-varying delays. IEEE/CAA Journal of Automatica Sinica 3(4), 477-482 (2016)
Shen, J, Lam, J: State feedback \(H_{\infty}\) control of commensurate fractional-order systems. Int. J. Syst. Sci. 45(3), 363-372 (2014)
Krstić, M, Kanellakopoulos, I, Kokotović, PV: Nonlinear and Adaptive Control Design. Wiley, New York (1995)
Ding, ZT: Adaptive control of non-linear systems with unknown virtual control coefficients. Int. J. Adapt. Control Signal Process. 14(5), 505-517 (2000)
Krstić, M, Kanellakopoulos, I, Kokotović, PV: Adaptive nonlinear control without overparametrization. Syst. Control Lett. 19, 177-185 (1992)
Kanellakopoulos, I, Kokotović, PV, Morse, AS: Systematic design of adaptive controllers for feedback linearizable systems. IEEE Trans. Autom. Control 36, 1241-1253 (1991)
Chen, WT, Xu, CX: Adaptive nonlinear control with partial overparametrization. Syst. Control Lett. 44(1), 13-24 (2001)
Krstić, M, Kokotović, PV: Control Lyapunov functions for adaptive nonlinear stabilization. Syst. Control Lett. 26(1), 17-23 (1995)
Wei, YH, Chen, YQ, Liang, S, Wang, Y: A novel algorithm on adaptive backstepping control of fractional order systems. Neurocomputing 165, 395-402 (2015)
Wei, YH, Tse, PW, Yao, Z, Wang, Y: Adaptive backstepping output feedback control for a class of nonlinear fractional order systems. Nonlinear Dyn. 86, 1047-1056 (2016)
Sheng, D, Wei, YH, Cheng, SS, Shuai, JM: Adaptive backstepping control for fractional order systems with input saturation. J. Franklin Inst. 354, 2245-2268 (2017)
Arshad, M, Lu, DC, Wang, J: \((N +1)\)-dimensional fractional reduced differential transform method for fractional order partial differential equations. Commun. Nonlinear Sci. Numer. Simul. 48, 509-519 (2017)
Acknowledgements
The work is supported in part by the National Natural Science Foundation of China (No. 11661065) and the Scientific Research Fund of Jiangxi Provincial Education Department (GJJ171135, GJJ151264, GJJ151267, GJJ161261).
Author information
Authors and Affiliations
Contributions
The author read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The author declares to have no conflicts of interest.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Wang, X. Mittag-Leffler stabilization of fractional-order nonlinear systems with unknown control coefficients. Adv Differ Equ 2018, 16 (2018). https://doi.org/10.1186/s13662-018-1470-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-018-1470-9