
Abstract
This paper focuses on fault detection filter (FDF) design for continuous-time nonlinear Markovian jump systems (NMJSs) with mode-dependent delay and time-varying transition probabilities (TPs). By using a novel Lyapunov-Krasovskii function and based on convex polyhedron technique, a new FDF, as the residual generator, is constructed to guarantee the mean-square exponential stability and a prescribed level of disturbance attenuation for admissible perturbations of NMJSs. Finally, the numerical simulation is carried out to demonstrate the effectiveness of our method.
Similar content being viewed by others

1 Introduction
Subject to the random abrupt variations, Markovian jump systems (MJSs) are assumed to be a framework to model dynamic systems, and they can be found in economic systems, communication systems, robot manipulator systems and so on. During the past decades, many efforts have been devoted to MJSs, which can be possibly used in the field of system stability [1–6], system control [7–13] and filtering [14–16].
For MJSs, fault detection is an important research topic. In the framework of fault detection, a threshold on residual signals is set. Once the value of residual evaluation function goes beyond the predefined threshold, the alert is triggered [17]. Up to now many results on fault detection of MJSs have been published, see [18–28] and the references therein. Generally, the fault detection method can be divided into three groups. The first group is the filter-based method. In [29], a filter is used to generate the residual signals to detect the fault. The second group is the statistic method. In [30], Bayesian theory and the likelihood method are used to evaluate the fault. The third group is the geometric method. In [31], a geometric approach is employed to find the fault. However in general, TPs are assumed to be time invariant. It is meaningful to focus on the case that TPs are time variant for the possible application in real engineering. In addition, time delays are mode-dependent sometimes, and usually the existence of nonlinear terms makes the real fault detection problem more complicated. To our best knowledge, the studies on fault detection for continuous-time nonlinear MJSs (NMJSs) with mode-dependent delay and time-varying TPs have been seldom carried out up to now, which motivates this paper. In addition, some techniques and lemmas will be included to improve the conservatism of theoretical results.
The remainder of this paper is organized as follows. The mathematical model under consideration and some preliminaries are provided in Section 2. A FDF for continuous-time NMJSs with mode-dependent delay and time-varying TPs is designed in Section 3. The illustrative example is included to verify the correctness of obtained theoretical results in Section 4, and finally the paper is concluded in Section 5.
Notations used in this paper are fairly standard. Let \(R^{n}\) be the n-dimensional Euclidean space, \(R^{n \times m}\) represents the set of \(n \times m\) real matrix, the symbol * denotes the elements below the main diagonal of a symmetric block matrix, \(A > 0\) means that A is a real symmetric positive definitive matrix, I denotes the identity matrix with appropriate dimensions. \(\operatorname{diag} \{ \cdot \}\) denotes the diagonal matrix. \(\mathrm{E}\{ \cdot\}\) refers to the expectation operator with respect to some probability measure P. \(\Vert \cdot \Vert \) refers to the Euclidean vector norm or the induced matrix 2-norm. The superscript T stands for matrix transposition, \(L_{n,h} = L([ - h,0],R^{n})\) denotes the Banach space of continuous functions mapping the interval \([ - h,0]\) into \(R^{n}\) with the topology of uniform convergence.
2 Model description and preliminaries
In this paper, \((\Omega,\Upsilon,P)\) denotes the probability space, where Ω is the sample space, ϒ is σ- algebra of a subset of the sample space, and P is the probability measure defined on ϒ. The process \(\{ r_{t},t \in[0, + \infty)\}\) is described by a Markovian chain with finite state space \(S_{1} = \{ 1,2, \ldots,N\}\), and its transition probability matrix \(\Pi^{(\sigma_{t + \Delta} )} = [\pi_{il}^{(\sigma_{t + \Delta} )}]_{N \times N}\) (\(i,l \in S_{1}\)) is governed by
where \(\pi_{ii} = - \sum_{l = 1,l \ne i}^{N} \pi_{il}\), \(\lim_{\Delta t \to 0}o(\Delta t)/\Delta t = 0\), and \(\pi_{il} \ge0\), \(l \ne i\) is the transition rate from mode i at time t to mode l at time \(t + \Delta t\).
In real engineering \(\Pi^{(\sigma_{t + \Delta} )}\) is not invariable. Hence, in this paper, we assume that \(\sigma_{t}\) varies in another finite set \(S_{2} = \{ 1,2, \ldots,M\}\), and the variations are considered as the stochastic variation. The variation of \(\sigma_{t}\) is governed by a higher-level transition probability (HTP) matrix \(\Lambda= [\lambda_{jk}]_{M \times M}\) (\(j,k \in S_{2}\)) and the transition probability of Markov chain satisfies
where \(\lambda_{jj} = - \sum_{k = 1,k \ne j}^{M} \lambda_{jk}\), and \(\lambda_{jk} \ge0\), \(k \ne j\) is the transition rate from mode j at t to mode k at \(t + \Delta\). The stochastic processes \(r_{t}\) and \(\sigma_{t}\) are assumed to be independent throughout this paper.
First, consider the Markov jump system with time-varying TPs as follows:
where \(x(t) \in R^{n}\) is the state vector of the system, \(\tau (t,r_{t},\sigma_{t})\) is the mode-dependent time-varying delay of the system, which satisfies \(h_{1} \le\tau(t,r_{t},\sigma_{t}) \le h\) and \(\dot{\tau} (t,r_{t},\sigma_{t}) \le d_{n}\), \(h_{12} = h - h_{1}\) is the change region of delay. \(l(t) \in R^{p}\) is the measurable output, \(u(t) \in R^{q}\) is the control input, \(d(t) \in R^{q}\) is the unknown disturbance input, \(f(t) \in R^{q}\) is the fault, \(d(t)\) and \(f(t)\) are assumed to be \(L_{2}\) norm bound, \(\psi(t_{0} + \theta) \in L_{n,h}\) is the initial condition of the state vector, \(G(t) \in R^{n}\) is the nonlinear term, such that
To enhance the feasible region of the criteria, we can divide the bounding into two subintervals
Model (1) can be represented as
In this paper, the following linear filter is designed:
where \(x_{f}(t) \in R^{n}\) is the state vector of the filter.
To improve the sensitiveness of residual to fault, we add a weighting matrix function \(W_{f}(s)\) into the fault \(f(t)\), that is, \(r_{w}(s) = W_{f}(s)f(s)\), where \(r_{w}(s)\) and \(f(s)\) refer to the Laplace transform of \(r_{w}(t)\) and \(f(t)\). The minimal realization of \(r_{w}(s) = W_{f}(s)f(s)\) is assumed to be
where \(r_{w}(t)\) is the reference residual, and our objective is to design a fault detection filter (FDF) which can result in the minimal difference between the reference model and the fault detection filter.
For simplicity, for each possible \(r_{t} = r_{i}\), \(\sigma_{t} = \sigma_{j}\), \(i \in S_{1}\), \(j \in S_{2}\), the matrix \(A(r_{t},\sigma_{t})\) will be denoted by \(A_{ij}\), and so on.
Define \(r(t) = r_{f}(t) - r_{w}(t)\), we get the filtering error system as follows:
where
The problem of fault detection can be transformed into \(H_{\infty} \) filtering problem for the system, that is, to determine all matrices such that the filtering error system (5) is robustly mean-square exponentially stable with \(H_{\infty} \) performance γ as follows:
where \(\Vert r(t) \Vert = \sqrt{\{ \int_{0}^{\infty} r(t) r(t)\,dt\}}\), \(\Vert w(t) \Vert = \sqrt{\{ \int_{0}^{\infty} w(t) w(t)\} \,dt}\).
In this paper, the residual evaluation function \(J(r)\) and threshold \(J_{\mathrm{th}}\) are chosen as follows:
where \([t_{0},t_{0} + T]\) is the finite-time window, T denotes the timeslot, and \(t_{0}\) denotes the initial evaluation time. The occurrence of fault can be detected by comparing \(J(r)\) and \(J_{\mathrm{th}}\) based on the relationship as follows:
Before ending the section, we give the following notations, definitions and lemmas, which will be used in the proof of our main results.
Definition 1
The filtering error system (4) with \(w(t) = 0\) is mean-square exponentially stable if there exist scalars \(\alpha> 0\) and \(\beta> 0\) such that
where \(\Vert \bar{\psi} \Vert _{h} = \max \{ \sup_{h \le\theta \le0} \Vert \bar{\psi} (\theta) \Vert ,\sup_{h \le\theta\le 0} \Vert \dot{\bar{\psi}} (\theta) \Vert \}\).
Definition 2
Given a positive scalar γ, the filtering error system (5) is mean-square exponentially stable with \(H_{\infty} \) performance γ if, for every system mode and delay mode, the filtering error system (5) with \(w(t) = 0\) is mean-square exponentially stable, and under zero initial condition it satisfies \(\Vert r(t) \Vert _{2} \le\gamma \Vert w(t) \Vert _{2}\) for any non-zero \(w(t) \in L_{2}[0, + \infty]\).
Lemma 1
[32]
Let \(\Phi_{1},\Phi_{1}, \ldots,\Phi_{N}:R^{m} \to R^{n}\) be a given finite number of functions such that they have positive values in an open subset D of \(R^{m}\). Then a reciprocally convex combination of these functions over D is a function of the form
where the real numbers \(\alpha_{i}\) satisfy \(\alpha_{i} > 0\) and \(\sum_{i} \alpha_{i} = 1\).
Lemma 2
[33]
For any constant matrices E, G and F with appropriate dimensions, \(F^{T}F \le kI\), k is a positive scalar, then
where c is a positive scalar, \(x \in R^{n}\), and \(y \in R^{n}\).
Lemma 3
[34]
For any positive definite matrix \(\Phi\in R^{n \times n}\), scalar \(\gamma> 0\), vector function \(w:[0,\gamma] \to R^{n}\) such that the integrations concerned are well defined, then
3 Main results
In this section, based on the Lyapunov method and linear matrix inequality techniques, the following theoretical results can be derived.
Theorem 1
For \(d_{n} < 1\), given positive scalars h, \(h_{1}\) and k, if there exist \(R_{1}\), \(R_{2}\), \(R_{3}\), \(S_{12}\), \(M,Q_{1}\), \(Q_{2}\), U, \(U_{1}\), \(U_{2}\), W, \(M_{ij}\), \(F_{ij}\) with appropriate dimension, such that
where
For \(d_{n} \ge1\), given positive scalars h, \(h_{1}\) and k, if there exist \(R_{1}\), \(R_{2}\), \(R_{3}\), \(S_{12}\), \(Q_{1}\), \(Q_{2}\), U, \(U_{1}\), \(U_{2}\), W, \(F_{ij}\) with appropriate dimension, such that
where
Then the filtering error system (5) is mean-square exponentially stable with \(H_{\infty} \) performance γ.
Proof
For \(d_{n} < 1\), choosing the following Lyapunov function candidate
where
with
Let L be the infinitesimal generator of random process. Then we have
where
where \(0 \le\gamma_{1} = \frac{\tau_{ij}(t) - h_{1}}{h - \tau_{ij}(t)} \le 1\), \(0 \le\gamma_{2} = \frac{h - \tau_{ij}(t)}{\tau_{ij}(t) - h_{1}} \le 1\).
For matrix \(\bigl[ {\scriptsize\begin{matrix}{} R_{2} & S_{12} \cr S_{12} & R_{2} \end{matrix}} \bigr] > 0\), it holds that
Hence
We can obtain
Remark 1
When \(\tau_{ij}(t) = h\) or \(\tau_{ij}(t) = h_{1}\), it can be derived that \(\xi^{T}(t)(e_{3} - e_{2}) = 0\) or \(\xi ^{T}(t)(e_{2} - e_{4}) = 0\), respectively. Hence the inequality holds.
Remark 2
For \(d_{n} < 1\), it can be concluded that \(- (1 - \dot{\tau}_{ij}(t)) < 0\), which means \(V_{7}(t,i,j)\) and \(V_{8}(t,i,j)\) can be used to improve the conservatism of criteria.
According to the Leibniz-Newton formula,
Then the following inequality can be concluded:
where
For case 1: \(\frac{M + N}{2}x(t) \le G(t) \le Nx(t)\).
Consider
We get
The following inequality can be concluded:
where
Consider the following performance index:
For \(E\{ V(t_{0},i,j)\} = 0\) and \(E\{ V(t,i,j)\} \ge0\), we have
where
With (15a)-(15m), it can be derived that \(\Pi_{ij} < 0\).
For case 2: \(Mx(t) \le G(t) \le\frac{M + N}{2}x(t)\).
Consider
We get
Then the following inequality can be concluded:
where
Consider the following performance index:
For \(E\{ V(t_{0},i)\} = 0\) and \(E\{ V(t,i)\} \ge0\), we have
where
With (15a)-(15m), it can be derived that \(\bar{\Pi}_{ij} < 0\).
Next, we discuss the stability of the filtering error system (5) with \(w(t) = 0\), which is equivalent to the stability of the filtering error system (5) without \(w(t)\).
For case 1 and case 2, with (21) and (22), we can get the following inequalities respectively:
Considering \(\Pi_{ij} < 0\), \(\bar{\Pi}_{ij} < 0\), one can obtain \(\Upsilon_{ij} < 0\), \(\bar{\Upsilon}_{ij} < 0\).
Then with (15a)-(15m) it can be concluded
Hence
With Dynkin’s formula, one can obtain
Then
According to the definition of \(V(t,i,j)\), we have
The following inequality can be concluded:
where
By Definition 1, it can be derived that the fault detection system (1) without \(w(t)\) is mean-square exponentially stable. Then, based on Definition 2, we can conclude that the filtering error system (5) is mean-square exponentially stable with \(H_{\infty} \) performance γ.
Now let us consider the case \(d_{n} \ge1\). Choose the Lyapunov function candidate as follows:
Remark 3
For \(d_{n} \ge1\), it can be concluded that \(- (1 - \dot{\tau}_{ij}(t)) \ge0\), which means \(V_{7}(t,i,j)\) and \(V_{8}(t,i,j)\) will increase the conservatism of theoretical results. Hence, in this case, \(V_{7}(t,i,j)\) and \(V_{8}(t,i,j)\) will not be included to construct the Lyapunov function.
Then the following inequality can be concluded:
where
As above proof, it can be concluded that
where
Considering Definition 1, it can be derived that the filtering error system (5) without \(w(t)\) is mean-square exponentially stable. Then, combined with Definition 2, we can conclude that the filtering error system (5) is mean-square exponentially stable with \(H_{\infty} \) performance γ. The proof of Theorem 1 is thus completed. □
Based on Theorem 1 and LMI techniques, the fault detection filter design problem is addressed as follows.
Theorem 2
For \(d_{n} < 1\), given positive scalars h, \(h_{1}\) and k, if there exist \(R_{1}\), \(R_{2}\), \(S_{12}\), M, \(Q_{1}\), \(Q_{2}\), U, \(U_{1}\), \(U_{2}\), W, \(M_{ij}\), \(F_{ij}\) with appropriate dimension, such that
where
For \(d_{n} \ge1\), given positive scalars \(h,h_{1}\) and k, if there exist \(R_{1}\), \(R_{2}\), \(S_{12}\), \(Q_{1}\), \(Q_{2}\), U, \(U_{1}\), \(U_{2}\), W, \(F_{ij}\) with appropriate dimension, such that
where
Then the filtering error system (5) is mean-square exponentially stable with \(H_{\infty} \) performance γ, and the desired parameters of FDF are determined by
Proof
First define \(F_{ij} = \operatorname{diag}\{ F_{1ij},F_{2ij},F_{3ij}\}\). Based on (15a)-(15m) and (31), one can obtain (30a)-(30m). Then, combined with Theorem 1 and Definition 1, it can be concluded that the filtering error system (5) is mean-square exponentially stable with \(H_{\infty} \) performance γ. The proof of Theorem 2 is thus completed. □
4 Simulation results
In this section, we will verify the proposed methodology by giving an illustrative example. Consider MJNDSs with parameters, Markovian switching modes and state-space matrices as follows:
The piecewise homogeneous TP matrices are
The HTP matrix is
Other parameters are \(\tau_{1}(t) = 0.3 + 0.3\sin(5t)\), \(\tau_{2}(t) = 0.4 + 0.2\cos(6t)\), \(h_{1} = 0.4\), \(h = 0.6\), \(h_{12} = 0.3\), \(d_{n} = 1.5\), \(M = 0\), \(N = 0.5I\), \(\gamma= 1.0\), \(k = 0.1\). The weighting matrix is \(W(s) = 5/(s + 5)\). Then, based on (4), it can be concluded that \(A_{w} = -5\), \(E_{w} = 5\), \(L_{w} = 1\). Based on Theorem 2, the filtering parameters are determined as follows:
Remark 4
It is noticed that \(d_{n} = 1.5\), which means that our theoretical results are suitable for the case that the derivative of time delay is bigger than 1.
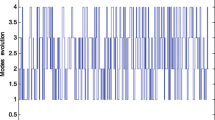
For numerical simulation, the initial state is \(\varphi(\theta) = [0.4, - 0.6]^{T}\), \(r_{0} = 1\), \(\sigma_{0} = 1\). The disturbance input \(d(t)\) is the uniform distribution noise between \([ -1,1]\). The fault signal \(f(t)\) is a square wave signal with unit amplitude. Corresponding numerical simulation results are shown in Figures 1-5.

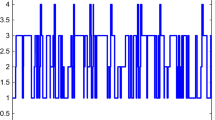
Evolution of system jumping mode with time-varying TPs.
Remark 5
Figure 1 depicts the evolution of system jumping mode with time-varying TPs, which is more random compared with time-invariant TPs. Figure 2 depicts the time response of disturbance input \(d(t)\). Figure 3 depicts the time response of the residual signal \(r(t)\). Figure 4 depicts the evolution of residual evaluation function \(J(r)\). Figure 5 depicts the time response of warning signal. For the case without fault, one can get \(\int_{0}^{20} r^{T}(t)r(t)\,dt = 0.1760\). We can choose threshold \(J_{\mathrm{th}} = 0.18\). Then, considering the case that fault exists, one can get \(\int_{0}^{5.8} r^{T}(t)r(t)\,dt = 0.1863 > J_{\mathrm {th}}\). From Figure 5 it can be found that the alert is triggered at about 5.8 seconds, which means that it will take 0.8 seconds to detect the fault.

Time response of disturbance input \(\pmb{d(t)}\) .

Time response of residual signal \(\pmb{r(t)}\) .

Evolution of residual evaluation function \(\pmb{J(r)}\) .

Time response of warning signal.
5 Conclusions
In this paper, the problem on fault detection filter design for continuous-time NMJSs with mode-dependent delay and time-varying TPs has been investigated. Based on Lyapunov-Krasovskii function approach and convex polyhedron technique, a FDF has been constructed for the possible application in fault detection such that the mean-square exponential stability and a prescribed level of disturbance attenuation are satisfied. Finally, the typical numerical example has been included to verify the correctness of theoretical results.
References
Mao, X: Exponential stability of stochastic delay interval systems with Markovian switching. IEEE Trans. Autom. Control 47(10), 1604-1612 (2002)
Wang, B, Cheng, J, Al-Barakati, A, Fardoun, H: A mismatched membership function approach to sampled-data stabilization for T-S fuzzy systems with time-varying delayed signals. Signal Process. 140, 161-170 (2017)
Fan, HJ, Liu, B, Wang, W, Wen, CY: Adaptive fault-tolerant stabilization for nonlinear systems with Markovian jumping actuator failures and stochastic noises. Automatica 51, 200-209 (2015)
Zhang, L, Boukas, EK: Stability and stabilization of Markovian jump linear systems with partly unknown transition probabilities. Automatica 45(2), 463-468 (2009)
Wang, B, Yan, J, Cheng, J, Zhong, SM: New criteria of stability analysis for generalized neural networks subject to time-varying delayed signals. Appl. Math. Comput. 314, 322-333 (2017)
Wang, Z, Liu, Y, Liu, X: Exponential stabilization of a class of stochastic system with Markovian jump parameters and mode-dependent mixed time-delays. IEEE Trans. Autom. Control 55(7), 1656-1662 (2010)
Wang, B, Shi, P, Karimi, HR: Fuzzy sliding mode control design for a class of disturbed systems. J. Franklin Inst. 351(7), 3593-3609 (2014)
Zhao, H, Chen, Q, Xu, S: \(H_{\infty}\) guaranteed cost control for uncertain Markovian jump systems with mode-dependent distributed delays and input delays. J. Franklin Inst. 346(10), 945-957 (2009)
Cheng, J, Wang, B, Park, JH, Kang, W: Sampled-data reliable control for T-S fuzzy semi-Markovian jump system and its application to single-link robot arm model. IET Control Theory Appl. 11(12), 1904-1912 (2017)
Wang, B, Shi, P, Karimi, HR, Song, Y, Wang, J: Robust \(H_{\infty}\) synchronization of a hyper-chaotic system with disturbance input. Nonlinear Anal., Real World Appl. 14(3), 1487-1495 (2013)
Cheng, J, Park, JH, Liu, Y, Liu, Z, Tang, L: Finite-time \(H_{\infty}\) fuzzy control of nonlinear Markovian jump delayed systems with partly uncertain transition descriptions. Fuzzy Sets Syst. 314, 99-115 (2017)
Wang, B, Cheng, J, Zhan, J: A sojourn probability approach to fuzzy-model-based reliable control for switched systems with mode-dependent time-varying delays. Nonlinear Anal. Hybrid Syst. 26, 239-253 (2017)
Cheng, J, Park, JH, Karimi, HR, Zhao, X: Static output feedback control of nonhomogeneous Markovian jump systems with asynchronous time delays. Inf. Sci. 399, 219-238 (2017)
Wu, Z, Su, H, Chu, J: \(H_{\infty}\) filtering for singular Markovian jump systems with time delay. Int. J. Robust Nonlinear Control 20(8), 939-957 (2010)
Liu, J, Gu, Z, Hu, S: \(H_{\infty}\) filtering for Markovian jump systems with time-varying delays. Int. J. Innov. Comput. Inf. Control 7(3), 1299-1310 (2011)
Shen, H, Xu, S, Song, X, Chu, Y: Delay-dependent \(H_{\infty}\) filtering for stochastic systems with Markovian switching and mixed mode-dependent delays. Nonlinear Anal. Hybrid Syst. 4(1), 122-133 (2010)
Karimi, HR, Zapateiro, M, Luo, N: A linear matrix inequality approach to robust fault detection filter design of linear systems with mixed time-varying delays and nonlinear perturbations. J. Franklin Inst. 347(6), 957-973 (2010)
Liu, M, Shi, P, Zhang, L, Zhao, X: Fault-tolerant control for nonlinear Markovian jump systems via proportional and derivative sliding mode observer technique. IEEE Trans. Circuits Syst. I 58(11), 2755-2764 (2011)
Zhong, M, Ding, Q, Shi, P: Parity space-based fault detection for Markovian jump systems. Int. J. Syst. Sci. 40(4), 421-428 (2009)
Wang, H, Wang, C, Gao, H, Wu, L: An LMI approach to fault detection and isolation filter design for Markovian jump system with mode-dependent time-delays. In: Proceedings of the American Control Conference, Minneapolis, USA, pp. 5686-5691 (2006)
Yao, X, Wu, L, Zheng, WX: Fault detection filter design for Markovian jump singular systems with intermittent measurements. IEEE Trans. Signal Process. 59(7), 3099-3109 (2011)
Zhang, L, Boukas, EK, Baron, L, Karimi, HR: Fault detection for discrete-time Markov jump linear systems with partially known transition probabilities. Int. J. Control 83(8), 1564-1572 (2010)
Yin, Y, Shi, P: Gain-scheduled robust fault detection on time-delay stochastic nonlinear systems. IEEE Trans. Ind. Electron. 58, 4908-4916 (2011)
Li, J, Park, JH, Ye, D: Fault detection filter design for switched systems with quantisation effects and packet dropout. IET Control Theory Appl. 11(2), 182-193 (2017)
Park, JH, Mathiyalagan, K, Sakthivel, R: Fault estimation for discrete-time switched nonlinear systems with discrete and distributed delays. Int. J. Robust Nonlinear Control 26(17), 3755-3771 (2016)
Ye, D, Park, JH, Fan, QY: Adaptive robust actuator fault compensation for linear systems using a novel fault estimation mechanism. Int. J. Robust Nonlinear Control 26(8), 1597-1614 (2016)
Li, J, Park, JH, Ye, D: Simultaneous fault detection and control design for switched systems with two quantized signals. ISA Trans. 66, 296-307 (2017)
He, S, Liu, F: Filtering-based robust fault detection of fuzzy jump systems. Fuzzy Sets Syst. 185, 95-110 (2011)
Wu, LG, Yao, XM, Zheng, WX: Generalized image fault detection for two-dimensional Markovian jump systems. Automatica 48, 1741-1750 (2012)
Li, P, Kadirkamanathan, V: Particle filtering based likelihood ratio approach to fault diagnosis in nonlinear stochastic systems. IEEE Trans. Syst. Man Cybern., Part C, Appl. Rev. 31(3), 337-343 (2001)
Meskin, N, Khorasani, K: A geometric approach to fault detection and isolation of continuous-time Markovian jump linear systems. IEEE Trans. Autom. Control 55(6), 1343-1357 (2010)
Park, P, Ko, JW, Jeong, C: Reciprocally convex approach to stability of systems with time-varying delays. Automatica 47(1), 235-238 (2011)
Boyd, S, Ghaoui, L, Feron, E, Balakrishnan, V: Linear Matrix Inequalities in Systems and Control Theory. Society for Industrial and Applied Mathematics, Philadelphia (1994)
Gu, K: An integral inequality in the stability problem of time-delay systems. In: The 39th IEEE Conference on Decision Control, Sydney, Australia (2000)
Acknowledgements
This work was partially supported by the Project of Education Department of Sichuan Province (15ZA0142), the Chunhui Plan Project of Ministry of Education (Z2015114), the National Natural Science Foundation of China (61703150), the Natural Science Foundation of Hubei Provinces of China (2016CFB211).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors read and approved the final manuscript.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Wang, B., Zou, F., Cheng, J. et al. Fault detection filter design for continuous-time nonlinear Markovian jump systems with mode-dependent delay and time-varying transition probabilities. Adv Differ Equ 2017, 262 (2017). https://doi.org/10.1186/s13662-017-1313-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-017-1313-0