
Abstract
In this paper, we investigate the problem of exponential stabilization criteria for a nonlinear system with mixed time-varying delays, including discrete interval and distributed time-varying delays. The time-varying delays are not necessarily differentiable. The exponential stabilization criteria of the nonlinear system are proposed via hybrid intermittent feedback control. Based on the improved Lyapunov-Krasovskii functionals with Leibniz-Newton’s formula, Jensen’s inequality and the reciprocal convex combination technique, the novel delay-dependent sufficient condition is derived in terms of linear matrix inequalities (LMIs). The obtained LMIs can be efficiently solved by standard convex optimization algorithms. A numerical example is given to demonstrate the effectiveness of the obtained result. Moreover, the results in this article generalize and improve the corresponding results of the recent works.
Similar content being viewed by others


1 Introduction
Nonlinear systems, as an appealing topic, have been thoroughly studied during the past decades. Due to the fact that most systems are inherently nonlinear in nature, these systems are one of the most interesting areas for researchers, including engineers, physicists, mathematicians and other scientists. The exponential stability of nonlinear systems has been widely received and deeply investigated [1–12], and the asymptotical stability of nonlinear systems has been investigated [13–17] as well. Time delay naturally appears in most of the real world systems. It is well known that the existence of time delay in a system may cause instability, poor performances and oscillations in, for instance, chemical engineering systems, biological modeling, electrical networks, physical networks and many natural sciences. Due to these results, the nonlinear system with time-varying delay has become an interesting topic in recent years; the authors have investigated interval time-varying delay [1, 3, 6–9, 18–23], discrete time-varying delay [4, 5, 24, 25], mixed time-varying delays [26–32] and so on.
In practical control designs, due to failure modes, system uncertainty, or systems with various modes of operation, the simultaneous stabilization problem often has to be taken into account. The problem is concerned with designing control which can simultaneously stabilize a set of systems. Among the usual approaches, there are many studies on the stabilization problem of a nonlinear system being reported in the literature [1–4, 9, 10, 14, 33]. In [33], the sufficient conditions for global asymptotic stabilization of nonlinear systems were given, and the corresponding feedback control laws were designed. Different controller design schemes have been proposed to construct feedback controllers, which make the closed-loop system dynamics converge to a fixed point or a periodic orbit. Recently, non-continuous control techniques, such as impulsive control [34–36] and intermittent control [6, 9, 10, 13, 29, 37–40], have attracted much attention. Some engineering researchers have widely focused their attention on intermittent control. Intermittent control is a feedback control method which not only shows some human control systems but also has applications in control engineering. In a periodically intermittent control, every control period consists of two parts: ‘work time’ for operative control and ‘rest time’ for inoperative control, which provides a spectrum of possibilities between the extremes of continuous-time and discrete-time control. Hence, intermittent control strategies are more economic and can simulate the real world situations better. Several nonlinear systems with intermittent control have been presented [6, 9, 10, 13, 37, 38, 40]. In [37], the synchronization of chaotic systems was studied by the intermittent feedback method. By using periodically intermittent control and free-matrix-based integral inequality, the exponential stabilization of neural network switch time-varying delay was investigated in [38]. In [9], the exponential stabilization problem for a class of uncertain nonlinear systems with state delay was solved by periodically intermittent control. The problem of delay-independently periodically intermittent stabilization for a class of time delay systems was introduced in [13]. In [40], the problem of exponential stabilization of systems with time-varying delay via periodically intermittent memory state-feedback control was studied by constructing a new Lyapunov-Krasovskii functional and employing the free-matrix-based integral inequality. In [10], the problems of stabilization and synchronization for a class of chaotic systems were discussed via intermittent control with non-fixed both control period and control width. Unfortunately, there have been few papers so far related to the topic of the exponential stabilization criteria of a nonlinear system with hybrid intermittent feedback control. This exponential stabilization of a nonlinear system remains an open problem and it has to be investigated more.
In order to solve the problem of exponential stabilization criteria for a nonlinear system with time-varying delay, most of researchers utilize the improved Lyapunov-Krasovskii functional combined with Newton-Leibniz formula [1–8, 16, 18–22, 24, 26–31, 37, 38, 41–43]; Jensen’s inequality [1, 18–20, 23, 29, 42, 43], the inequality technique[18, 20, 31, 37, 42], Wirtinger’s integral inequality [19, 23], Razumikhin’s technique [2, 3], Gronwall-Bellman’s lemma [14], and reciprocally convex combination [1, 18–20, 25, 32, 42, 43]. In [1], \(H_{\infty}\) control for a nonlinear system with interval time-varying delay was studied. The delay function is not necessary to be differentiable. Based on constructing new Lyapunov-Krasovskii functionals and using a new tighter bounding technique, the delay-dependent condition for this system has been established in terms of LMIs by using standard computational algorithms [44]. Thus, in this study, we focus on the reciprocally convex combination in order to solve the problem of exponential stabilization criteria for a nonlinear system with mixed time-varying delays, composed of discrete interval and distributed time-varying delay.
Inspired by the aforementioned discussion, this is the first time that the exponential stabilization criteria for a nonlinear system with mixed time-varying delay via hybrid intermittent feedback control have been studied. The main contributions of this paper lie in the following aspects. Firstly, the time-varying delays are mixture of discrete and distributed time-varying delays in a nonlinear system and hybrid intermittent feedback control. The constraint on the derivative of the time-varying delays is not required. So, this allows the time delay to be a fast time-varying function, which is different from the time delays in [7, 12, 15, 38, 40]. Secondly, for the control method, the exponential stabilization criteria for nonlinear system are studied via hybrid intermittent feedback control, containing state term, interval time-varying delay term and distributed time-varying delay term. It is different from the control method in [6, 9, 10, 13, 37, 38, 40]. From the above discussions, this work is one of the first reports of such investigation to further develop the exponential stabilization criteria for a nonlinear system with mixed time-varying delays via hybrid intermittent feedback control. By constructing the set of improved Lyapunov-Krasovskii functionals with Leibniz-Newton’s formula, Jensen’s inequality, and the reciprocal convex combination technique, a new delay-dependent sufficient condition of exponential stabilization criteria is established in terms of linear matrix inequalities (LMIs). The obtained LMIs are efficiently solved by standard convex optimization algorithms. A numerical example is included to show the effectiveness of the proposed hybrid intermittent feedback control scheme.
The rest of the paper is organized as follows. Section 2 provides some nonlinear system and mathematical preliminaries. Section 3 presents exponential stabilization criteria for a nonlinear system with mixed time-varying delays via hybrid intermittent feedback control. A numerical example is given in Section 4. Finally, the conclusion is provided in Section 5.
2 Problem formulation and mathematic preliminaries
Let us consider the nonlinear system with mixed time-varying delays as follows:
where \(x(t)=(x_{1}(t),x_{2}(t),x_{3}(t),\ldots,x_{n}(t))^{T} \in\mathbb {R}^{n}\) is the state vector; A, B and C are known real constant matrices; \(\mathscr{U}(t) \in\mathbb{R}^{m}\) is the control input. Let \(x_{h} := x(t-h(t)) \) and \(\operatorname{Int}_{x}:= \int^{t}_{t-k_{1}(t)}x(s)\,ds\), the nonlinear function \(f ( t, x, x_{h}, \operatorname{Int}_{x} , u ) : \mathbb {R}^{+}\times\mathbb{R}^{n} \times\mathbb{R}^{n} \times\mathbb {R}^{n} \times\mathbb{R}^{m}\rightarrow\mathbb{R}^{n} \) satisfies the following condition: \(\exists a_{1}, b_{1}, c_{1}, d_{1} > 0 \) such that
The time-varying delay functions \(h(t)\), \(d(t)\), \(k_{1}(t)\) and \(k_{2}(t)\) satisfy the conditions
The initial condition function \(\phi(t)\) denotes a continuous vector-valued initial function of \(t \in[-\tau_{\max},0]\).
In order to stabilize the origin of nonlinear system (1), we use the state feedback controller \(\mathscr{U}(t)\) satisfying
where \(D_{i}, i=1,2,3\) are given matrices of appropriate dimensions, \(u(t)=Kx(t)\) and K is a constant matrix control gain, \(\omega>0\) is the control period and \(\delta>0\) is the control width (control duration) and n is a non-negative integer. Then, substituting it into nonlinear system (1), it is easy to get the following:
It is clear that if the zero solution of nonlinear system (5) is globally exponentially stable, the exponential stabilization of the controlled nonlinear system (1) is achieved.
The following lemmas and theorem are used in the proof of the main result.
Lemma 1
[43]
For any constant symmetric matrix \(M \in R^{n \times n}\), \(M=M^{T}>0\), \(0\leq h_{1} \leq h(t) \leq h_{2}\), \(t\geq0\), and any differentiable vector function \(x(t) \in R^{n}\), we have
Lemma 2
Cauchy inequality, [45]
For any symmetric positive definite matrix \(N \in M^{n \times n} \) and \(x, y \in\mathbb{R}^{n}\), we have
Lemma 3
Schur complement, [46]
Given constant symmetric matrices X, Y, Z where \(X=X^{T}\) and \(0 < Y=Y^{T}\), then \(X+Z^{T}Y^{-1}Z<0\) if and only if
Theorem 4
Lower bounds theorem, [42]
Let \(f_{1}, f_{2}, \ldots, f_{N}: R^{m}\rightarrow R\) have positive values in an open subset D of \(R^{m}\). Then the reciprocally convex combination of \(f_{i}\) over D satisfies
subject to
3 Exponential stabilization of a delayed nonlinear system via hybrid intermittent feedback control
In this section, we present delay-dependent exponential stabilization analysis conditions for the nonlinear system with interval discrete and distributed time-varying delays via hybrid intermittent feedback control. Let us denote
Theorem 5
For some given scalar \(0 < \alpha<\varepsilon\), nonlinear system (1) with time-varying delay satisfying (3) and under the intermittent controller (4) is exponentially stabilizable if there exist positive constant ϵ and symmetric positive definite matrices \(P>0\), \(Q>0\), \(R>0\), \(S>0\), \(U>0\), \(T>0\), \(W>0\) and matrices L, \(S_{1}\) appropriately dimensioned so that the following symmetric linear matrix inequalities hold:
and
where
Moreover, the intermittent feedback control is
and the solution \(x(t,\phi)\) satisfies
Proof
Case I: For \(n\omega\leq t \leq n\omega+\delta\), let \(Y=P^{-1}\) and \(y(t)=Yx(t)\). Using the feedback control (14), let us consider the following Lyapunov-Krasovskii functional:
where
It is easy to check that
By taking the derivatives of \(V_{1}(t)\) along the trajectories of system (5), we have
By applying Lemma 2 and Lemma 1, we get
Let \(\epsilon= a_{1} + b_{1}\). By utilizing condition (2) and Lemma 2, we obtain
therefore,
Next, by taking the derivative of \(V_{i}, i= 2,3,\ldots,9,10\), along the trajectories of system (5), we have the following:
Applying Lemma 1 and the Leibniz-Newton formula, we get
and
Similarly,
Let \(\rho_{1} = \frac{h_{2}-h(t)}{h_{2}-h_{1}}\) and \(\rho_{2} = \frac {h(t)-h_{1}}{h_{2}-h_{1}}\), apply Theorem 4, which is
we have the following inequality:
It follows that
as a result, we have
From \(\dot{V_{8}}(t)\) and \(\dot{V_{10}}(t)\), applying Lemma 1 and the Leibniz-Newton formula, we get
and
By using the following identity relation:
multiplying by \(2\dot{y}^{T}(t)\), we get
Applying Lemma 2 and Lemma 1, we obtain
By utilizing condition (2) and Lemma 2, we have
Hence, according to (17)-(23) and adding the zero items of (24)-(26), it follows that
where Π is defined as in (6) and
Applying Lemma 3, the inequalities \(\mathscr{N}_{1}<0\) and \(\mathscr{N}_{2}<0\) are equivalent to \(\Pi_{1}<0\) and \(\Pi_{2}<0\), respectively. Therefore, it follows from (6), (8)-(9) and (27) that
Thus, equation (28) can be reduced to the following form:
Case II: For \(n\omega+\delta< t \leq(n+1)\omega\), we choose the Lyapunov-Krasovskii functional having the following form:
where \(V_{i}(t), i = 1, 2, \ldots, 7\) and 10 are defined similarly as in (15). Using a method similar to that of Case I, we get
where Π̃ is defined as in (7) and
Applying Lemma 3, the inequalities \((\mathscr {N}_{3}-2\varepsilon P )<0\) and \(\mathscr{N}_{4}<0\) are equivalent to \(\Pi_{3}<0\) and \(\Pi_{4}<0\), respectively. Therefore, it follows from (7), (10)-(11) and (30) that
From the above differential inequality (31), we have
From (29) and (32), it follows that
For any \(t>0\), there is \(n_{0}\geq0\) such that \(n_{0}\omega+\delta< t \leq(n_{0}+1)\omega\).
Case 1. For \(n_{0}\omega\leq t \leq n_{0}\omega+\delta\), using condition (13), we have
Case 2. For \(n_{0}\omega+\delta< t \leq(n_{0}+1)\omega\), using condition (13), we get
Let \(\xi=e^{-(-2\alpha\delta+2(\varepsilon-\alpha)(\omega-\delta ))}\), from (33) and (34) it follows that
Estimating \(V (x(0))\), we get
We have obtained the following:
which implies that nonlinear system (1) is exponentially stable under controller (4). This completes the proof. □
Remark 6
In our main results, the exponential stabilization problems are considered for a class of nonlinear systems with non-differentiable time-varying delays, including interval time-varying delay and distributed time-varying delay. We construct the improved Lyapunov-Krasovskii functionals \(V(x(t))\) as shown in (15). The exponential stabilizability conditions are independent of the derivatives of the time-varying delays and then the methods used in [7, 12, 15, 38, 40] are not applicable to this system.
4 A numerical example
In this section, we present an example to show the effectiveness of the result in Theorem 5.
Example 4.1
In this example, the nonlinear systems with mixed time-varying delays proposed by [10] can be described by
where
Model (35) turns into the following model (1) with parameters:
and we give
Solution: From conditions (6)-(13) of Theorem 5 with parameters \(a_{1}=4.7249\), \(b_{1}=8.0045\), \(c_{1}=1.6\), \(d_{1}=0\) \(h_{1}=0, h_{2}=0.9, d=0.2, k_{1}=0.1, k_{2}=0.1\), \(\alpha= 0.3\), \(\varepsilon= 1.5\), \(\omega= 4\), \(\delta= 3.25\). By using the LMI Toolbox in MATLAB, we obtain
with a stabilizing controller
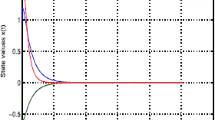
For the purpose of comparison, we also tested the method proposed in [10]. Table 1 compares the feedback controller gains obtained from those two methods. The numerical simulation of nonlinear system (35) with time-varying delays \(h(t)=0.3+0.4\vert \cos t \vert \), \(k_{1}(t)=0.2\vert \sin t \vert \), the initial condition \(\phi(t)=[7\cos(8s),-8\cos(7s)]\), \(\forall s\in[-0.7,0]\) and without hybrid intermittent feedback control is represented in Figure 1, which shows that system (35) is stable. Figure 2 shows the trajectories of \(x_{1}(t)\) and \(x_{2}(t)\) of nonlinear system (35) with time-varying delays \(d(t)=0.1+0.1\vert \cos t \vert \), \(k_{2}(t)=0.1\vert \sin t \vert \) and hybrid intermittent feedback control (36). Furthermore, because of the lower bounds \(h_{1}\neq0\) of the delay function, the method proposed in [10] is not applicable in this case.

The trajectories of \(\pmb{x_{1}(t)}\) and \(\pmb{x_{2}(t)}\) of nonlinear system ( 35 ) with mixed time-varying delay and hybrid intermittent feedback control deactivated.

Remark 7
In Example 4.1, we see that every state variable of nonlinear system (35) is stable without control. After applying controller (36), all the state variables of nonlinear system (35) converge to 0. That shows the effectiveness of the controller.
5 Conclusion
In this paper, the exponential stabilization criterion of a nonlinear system with mixed time-varying delays via hybrid intermittent feedback control was investigated. The time-varying delay functions are not necessary to be differentiable, which allows time delay functions to be fast time-varying functions. Moreover, hybrid intermittent feedback control, including state term, interval time-varying delay term and distributed time-varying delay term, was considered for the exponential stabilization of the nonlinear system. Based on constructing an improved Lyapunov-Krasovskii functional, Leibniz-Newton’s formula, Jensen’s inequality, reciprocal convex and novel delay-dependent sufficient condition for the exponential stabilization of the system are first achieved in terms of LMIs. Finally, a numerical example is included to show the effectiveness of the proposed hybrid intermittent feedback control scheme. The results in this paper generalize and improve the corresponding results of the recent works.
References
Thanh, NT, Phat, VN: \(H_{\infty}\) control for nonlinear systems with interval non-differentiable time-varying delay. Eur. J. Control 19, 190-198 (2013)
Phat, VN, Ha, QP: \(H_{\infty}\) control and exponential stability of nonlinear nonautonomous systems with time-varying delay. J. Optim. Theory Appl. 142, 603-618 (2009)
Phat, VN: Memoryless \(H_{\infty}\) controller design for switched nonlinear systems with mixed time-varying delays. Int. J. Control 82(10), 1889-1898 (2009)
Phat, VN: Switched controller design for stabilization of nonlinear hybrid systems with time-varying delays in state and control. J. Franklin Inst. 347, 195-207 (2010)
Phat, VN, Botmart, T, Niamsup, P: Switching design for exponential stability of a class of nonlinear hybrid time-delay systems. Nonlinear Anal. Hybrid Syst. 3, 1-10 (2009)
Botmart, T, Niamsup, P, Liu, X: Synchronization of non-autonomous chaotic systems with time-varying delay via delayed feedback control. Commun. Nonlinear Sci. Numer. Simul. 17, 1894-1907 (2012)
Zamani, I, Shafiee, M, Ibeas, A: Exponential stability of hybrid switched nonlinear singular systems with time-varying delay. J. Franklin Inst. 350, 171-193 (2013)
Zhai, S, Yang, X-S: Exponential stability of time-delay feedback switched systems in the presence of asynchronous switching. J. Franklin Inst. 350, 34-49 (2013)
Dong, Y, Liu, J: Exponential stabilization of uncertain nonlinear time-delay systems. Adv. Differ. Equ. 2012, 180 (2012)
Song, Q, Huang, T: Stabilization and synchronization of chaotic systems with mixed time-varying delays via intermittent control with non-fixed both control period and control width. Neurocomputing 154, 61-69 (2015)
Xu, Z, Liu, W, Li, Y, Hu, J: Robustness analysis of global exponential stability of nonlinear stochastic systems with respect to neutral terms and time-varying delays. Adv. Differ. Equ. 2015, 105 (2015)
Tian, Y, Cai, Y, Sun, Y, Li, T: Exponential stabilization of a class of time-varying delay systems with nonlinear perturbations. Math. Probl. Eng. 2015, 1-11 (2015)
Chen, WH, Zhong, J, Zheng, WX: Delay-independent stabilization of a class of time-delay systems via periodically intermittent control. Automatica 71, 89-97 (2016)
Srinivasan, V, Sukavanam, N: Asymptotic stability and stabilizability of nonlinear systems with delay. ISA Trans. 65, 19-26 (2016)
Dong, Y, Mei, S, Wang, X: Novel stability criteria of nonlinear uncertain systems with time-varying delay. Abstr. Appl. Anal. 2011, 1 (2011)
Li, X, Shen, J, Akca, H, Rakkiyappan, R: LMI-based stability for singularly perturbed nonlinear impulsive differential systems with delays of small parameter. Appl. Math. Comput. 250, 798-804 (2015)
Zhao, Y, Ma, Y: Stability of neutral-type descriptor systems with multiple time-varying delays. Adv. Differ. Equ. 2012, 15 (2012)
Lee, WI, Lee, SY, Park, PG: A combined first- and second-order reciprocal convexity approach for stability analysis of systems with interval time-varying delays. J. Franklin Inst. 353, 2104-2116 (2016)
Lee, WI, Lee, SY, Park, PG: A combined reciprocal convexity approach for stability analysis of static neural networks with interval time-varying delays. Neurocomputing 221, 168-177 (2017)
Vembarasan, V, Balasubramaniam, P, Joob, EM: \(H_{\infty}\) state-feedback control of time-delay systems using reciprocally convex approach. J. Process Control 24, 892-904 (2014)
Fernando, TL, Phat, VN, Trinh, HM: Output feedback guaranteed cost control of uncertain linear discrete systems with interval time-varying delays. Appl. Math. Model. 37, 1580-1589 (2013)
Liu, P-L: State feedback stabilization of time-varying delay uncertain systems: a delay decomposition approach. Linear Algebra Appl. 438, 2188-2209 (2013)
Hien, LV, Trinh, H: Exponential stability of time-delay systems via new weighted integral inequalities. Appl. Math. Comput. 275, 335-344 (2016)
Sathananthan, S, Knap, MJ, Strong, A, Keel, LH: Robust stability and stabilization of a class of nonlinear discrete time stochastic systems: an LMI approach. Appl. Math. Comput. 219, 1988-1997 (2012)
Kang, W, Zhong, S, Cheng, J: \(H_{\infty}\) state estimation for discrete-time neural networks with time-varying and distributed delays. Adv. Differ. Equ. 2015, 263 (2015)
Han, L, Qiu, C, Xiao, J: Finite-time \(H_{\infty}\) control synthesis for nonlinear switched systems using T-S fuzzy model. Neurocomputing 171, 156-170 (2016)
Park, JH: Stability criterion for neutral differential systems with mixed multiple time-varying delay arguments. Math. Comput. Simul. 59, 401-412 (2002)
He, Y, Wua, M, She, J-H, Liu, G-P: Delay-dependent robust stability criteria for uncertain neutral systems with mixed delays. Syst. Control Lett. 51, 57-65 (2004)
Botmart, T, Niamsup, P: Exponential synchronization of complex dynamical network with mixed time-varying and hybrid coupling delays via intermittent control. Adv. Differ. Equ. 2014, 116 (2014)
Zhang, H, Dong, M, Wang, Y, Sun, N: Stochastic stability analysis of neutral-type impulsive neural networks with mixed time-varying delays and Markovian jumping. Neurocomputing 73, 2689-2695 (2010)
Botmart, T, Weera, W: Guaranteed cost control for exponential synchronization of cellular neural networks with mixed time-varying delays via hybrid feedback control. Abstr. Appl. Anal. 2013, Article ID 175796 (2013)
Chen, H, Cheng, J, Zhong, S, Yang, J, Kang, W: Improved results on reachable set bounding for linear systems with discrete and distributed delays. Adv. Differ. Equ. 2015, 145 (2015)
Dong, Y, Mei, S: Global asymptotic stabilization of non-linear systems. Int. J. Control 82, 279-286 (2009)
He, W, Chen, G, Han, Q-L, Qian, F: Network-based leader-following consensus of nonlinear multi-agent systems via distributed impulsive control. Inf. Sci. 380, 145-158 (2017)
Wang, Z-P, Wu, H-N: Fuzzy impulsive control for uncertain nonlinear systems with guaranteed cost. Fuzzy Sets Syst. 302, 143-162 (2016)
Ma, T, Zhang, L, Gu, Z: Further studies on impulsive consensus of multi-agent nonlinear systems with control gain error. Neurocomputing 190, 140-146 (2016)
Huang, T, Li, C: Chaotic synchronization by the intermittent feedback method. J. Comput. Appl. Math. 234, 1097-1104 (2010)
Zhang, Z-M, He, Y, Zhang, C-K, Wu, M: Exponential stabilization of neural networks with time-varying delay by periodically intermittent control. Neurocomputing 207, 469-475 (2016)
Zochowski, M: Intermittent dynamical control. Physica D 145, 181-190 (2000)
Zhiming, Z, Yong, HE, Min, MU, Liming, D: Exponential stabilization of systems with time-varying delay by periodically intermittent control. In: 35th Chinese Control Conference (CCC 2016), Chengdu, China, pp. 1523-1528. IEEE Press, New York (2016)
Cao, Y-Y, Frank, PM: Stability analysis and synthesis of nonlinear time-delay systems via linear Takagi-Sugeno fuzzy models. Fuzzy Sets Syst. 124, 213-229 (2001)
Park, PG, Ko, JW, Jeong, C: Reciprocally convex approach to stability of systems with time-varying delays. Automatica 47, 235-238 (2011)
Wang, B, Zeng, Y, Cheng, J: Further improvement in delay-dependent stability criteria for continuous-time systems with time-varying delays. Neurocomputing 147, 324-329 (2015)
Gahinet, P, Nemirovskii, A, Laub, AJ, Chiali, M: LMI Control Toolbox: for Use with MATLAB. The Mathworks, Natick (1995)
Gu, K, Kharitonov, VL, Chen, J: Stability of Time-Delay System. Birkhäuser, Basel (2003)
Boyd, S, Ghaoui, EL, Feron, E, Balakrishnan, V: Linear Matrix Inequalities in System and Control Theory. SIAM, Philadephia (1994)
Acknowledgements
The authors would like to thank the editor and the reviewers for their helpful advice. The first author was supported by National Research Council of Thailand (NRCT), Kasetsart University Research and Department of Institute (KURDI), Faculty of Science and Engineering and Research and Academic Service Division, Kasetsart University, Chalermprakiat Sakon Nakhon Province Campus. The second author was financially supported by the Thailand Research Fund (TRF), the Office of the Higher Education Commission (OHEC) and Khon Kaen University (grant number: TRG5880009).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally to the writing of this paper. Moreover, all authors also read and carefully approved the final manuscript.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Prasertsang, P., Botmart, T. Novel delay-dependent exponential stabilization criteria of a nonlinear system with mixed time-varying delays via hybrid intermittent feedback control. Adv Differ Equ 2017, 199 (2017). https://doi.org/10.1186/s13662-017-1255-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-017-1255-6