
Abstract
A delayed computer virus spreading model in the network with limited anti-virus ability is proposed in the present paper. Local stability and the existence of a Hopf bifurcation are proved by taking the time delay as the bifurcation parameter and analyzing the distribution of the roots of the corresponding characteristic equation. Furthermore, properties of the Hopf bifurcation are investigated by using the normal form theory and the center manifold theorem. Finally, a numerical example is presented to demonstrate our obtained results.
Similar content being viewed by others

1 Introduction
With the rapid development of computer technology and network communication technology, more and more functionalities and facilities have been brought to us by the network. However, at the same time, there is a dramatic increase in computer viruses, which has brought about huge financial losses and social panic [1–3]. Consequently, it is quite urgent to understand the spread law of computer viruses over the network.
To this end, and based on the fact that the propagation of computer viruses among computers resembles that of biological viruses among a population, dynamical modeling is one of the most effective approaches. Since the pioneering work of Kephart and White [4, 5], many dynamical models describing the propagation of computer viruses in the network have been established by appropriately modifying epidemic models, such as SIR [6, 7], SIRS [8–11], SEIR [12], SEIRS [13, 14], SLBS [15–17], SLBQRS [18], SEVIR [19] models and so on. All the computer virus models above neglect the fact that computer viruses possess a paroxysmal nature in common and computer viruses have the possibility of an outbreak absence of aura. Namely, they assume that once a susceptible computer in the network is infected, it is in its latency. In addition, antivirus techniques always lag behind virus techniques. Thus, computers in the network are susceptible to the attack during the period that the anti-virus software aims to conquer the new viruses. Based on this, Xu and Ren [20] proposed the following SEIR computer virus spreading model in the network with limited anti-virus ability:
where \(S(t)\), \(E(t)\), \(I(t)\) and \(R(t)\) denote the numbers of the susceptible computers, the exposed computers where computer viruses are latent, the infected computers where computer viruses are breaking out and the recovered computers that have been equipped with anti-virus software at time t, respectively. β is the transmission rate of the infected computers; p is the rate at which a susceptible computer breaks out suddenly due to its connection with infected computers; \(1-p\) is the rate at which a susceptible computer is latent due to its connection with infected computers; ϱ is the death rate of computers in the network; γ, ε and α are the state transition rates. Xu and Ren [20] studied stabilities of virus-free equilibrium and virus equilibrium.
However, it should be pointed out that system (1) neglects the time delay due to the latent period of computer viruses in the exposed computers and the time delay due to the period that anti-virus software uses to clean the viruses in the infected computers. As is known, in order to reflect the dynamical behaviors of a dynamical model depending on the past history of the system, it is often necessary to incorporate time delays into the model. Dynamical models with time delay have been investigated extensively by scholars at home and abroad in recent years, especially predator-prey models [21–26], epidemic models [27–29] and computer virus models [9–11, 30, 31]. Motivated by the work above, we consider the following computer virus model with delays:
where \(\tau_{1}\) is the time delay due to the latent period of computer viruses in the exposed computers and \(\tau_{2}\) is the time delay due to the period that anti-virus software uses to clean the viruses in the infected computers. For convenience, throughout this paper, we assume that \(\tau_{1}=\tau_{2}\). Then system (2) becomes
The remainder of this paper is organized in the following pattern. In Section 2, local stability of the viral equilibrium and the existence of a Hopf bifurcation are examined. In Section 3, the direction of the Hopf bifurcation and the stability of the bifurcating periodic solutions are investigated. In order to illustrate the validity of the theoretical analysis, a numerical example is presented in Section 4. Some main conclusions are drawn in Section 5.
2 Stability of the viral equilibrium and existence of Hopf bifurcation
Solving the algebraic system
we can get the unique viral equilibrium \(P_{*}(S_{*}, E_{*}, I_{*}, R _{*})\) of system (3) if \(b\beta \gamma +pb\beta \varrho +\gamma \varrho \varepsilon >\varrho (\gamma +\varrho )(\varepsilon + \alpha +\varrho )\) and \(\varepsilon +\alpha +\varrho >\frac{pb\beta }{ \varrho +\beta I_{*}}\), where
In what follows, we can get the characteristic equation of system (3) at \(P_{*}(S_{*}, E_{*}, I_{*}, R_{*})\)
where
with
Multiplying \(e^{\lambda \tau }\) on both sides of Eq. (5), Eq. (5) equals
When \(\tau =0\), then Eq. (6) reduces to
where
Thus, according to the Routh-Hurwitz criterion, the real parts of all roots of Eq. (7) are negative if and only if \(\alpha_{00}>0\), \(\alpha_{03}>0\), \(\alpha_{02}\alpha_{03}>\alpha_{01}\) and \(\alpha_{01}\alpha_{02}\alpha_{03}>\alpha_{00}\alpha_{03}^{2}+ \alpha_{01}^{2}\).
Let \(\lambda =i\omega\) (\(\omega >0\)) be the root of Eq. (6), then
from which we obtain
with
Then we can get the equation with respect to ω of the following form:
Next, we give the following assumption. \((H_{1})\): Eq. (8) has at least one positive root \(\omega_{0}\). For \(\omega_{0}\), we have
Differentiating Eq. (6) with respect to τ, we have
with
Then
where
To establish a Hopf bifurcation at \(\tau =\tau_{0}\), we make the following assumption. \((H_{2})\): \(G_{1R}\times G_{2R}+G_{1I}\times G _{2I}\neq 0\).
Summarizing the above analysis, and based on the Hopf bifurcation theorem in [32], we have the following.
Theorem 1
Suppose that conditions \((H_{1})\)-\((H_{2})\) hold for system (3). \(P_{*}(S_{*}, E_{*}, I_{*}, R_{*})\) is locally asymptotically stable when \(\tau \in [0, \tau_{0})\); a Hopf bifurcation occurs at \(P_{*}(S_{*}, E_{*}, I_{*}, R_{*})\) when \(\tau =\tau_{0}\) and a family of periodic solutions bifurcate from \(P_{*}(S_{*}, E_{*}, I _{*}, R_{*})\).
3 Direction of the Hopf bifurcation and stability of the bifurcating periodic solutions
In this section, we will employ the algorithm of Hassard et al. in [32] to analyze the direction of the Hopf bifurcation and the stability of bifurcating periodic solutions from the viral equilibrium \(P_{*}(S _{*}, E_{*}, I_{*}, R_{*})\) of system (3) at \(\tau =\tau _{0}\). Let \(u_{1}(t)=S(t)-S_{*}\), \(u_{2}(t)=E(t)-E_{*}\), \(u_{3}(t)=I(t)-I _{*}\), \(u_{4}(t)=R(t)-R_{*}\), and rescale the delay by \(t\rightarrow (t/\tau )\). Let \(\tau =\tau_{0}+\mu \), \(\mu \in R\). Then system (3) can be transformed into the following form:
in the phase space \(C=C([-1, 0], R^{4})\), where \(u_{t}=(u_{1}(t), u _{2}(t), u_{3}(t), u_{4}(t))^{T}=(S, E, I, R)^{T} \in R^{4}\), \(u_{t}(\theta )=u(t+\theta )\in C\) and \(L_{\mu }\): \(C\rightarrow R ^{4}\), \(F(\mu , u_{t})\rightarrow R^{4}\) are given as follows:
and
with
Based on the Riesz representation theorem, there is a matrix whose components are bounded variation functions \(\eta (\theta , \mu )\) in \(\theta \in [-1, 0]\) such that
for \(\phi \in C\). In fact, we choose
with \(\delta (\theta )\) is the Dirac delta function.
For \(\phi \in C([-1,0], R^{4})\), define
and
Then system (9) is equivalent to
For \(\varphi \in C^{1}([0, 1], (R^{4})^{*})\), the adjoint operator \(A^{*}\) of \(A(0)\) (the linear operator of Eq. (16)) is defined as follows:
where \(\eta (\theta )=\eta (\theta , 0)\).
Suppose that \(q(\theta )=(1, q_{2}, q_{3}, q_{4})^{T}e^{i\omega_{0} \tau_{0}\theta }\) is the eigenvector of \(A(0)\) associated with \(+i\omega_{0}\tau_{0}\) and \(q^{*}(s)=D(1, q_{2}^{*}, q_{3}^{*}, q_{4} ^{*})^{T}e^{i\omega_{0}\tau_{0}s}\) is the eigenvector of \(A^{*}\) associated with \(-i\omega_{0}\tau_{0}\). Then one can obtain
Then, by the definitions of \(A(0)\) and \(A^{*}\), we have
Therefore,
and
In addition,
and
Thus, we can get the expressions of \(q_{2}\), \(q_{3}\), \(q_{4}\) and \(q_{2}^{*}\), \(q_{3}^{*}\), \(q_{4}^{*}\) as follows:
In order to assure \(\langle q^{*}, q\rangle =1\), we need to calculate the expression of D. From Eq. (18), we have
Thus,
On the other hand, according to \(\langle \varphi , A\phi \rangle = \langle A^{*}\varphi , \phi \rangle \), we obtain
Obviously, \(\langle q^{*}, \bar{q}\rangle =0\).
Next, we compute the coordinates to describe the center manifold \(C_{0}\) at \(\mu =0\). Let \(u_{t}\) be the solution of Eq. (16) when \(\mu =0\). Define
on the center manifold \(C_{0}\), then we have
where
and z and z̄ are local coordinates for the center manifold \(C_{0}\) in the direction of \(q^{*}\) and \(\bar{q}^{*}\). Here, we only deal with real solutions, which gives
where
Thus,
where
Since
we have
Based on Eq. (31)-Eq. (35), one can obtain
with
Therefore,
Thus, from Eq. (33) and Eq. (38), we have
Next, we need to obtain the expressions of \(W_{20}\) and \(W_{11}\). From Eq. (29)-Eq. (33), we have
where
From Eq. (30), Eq. (31), Eq. (39) and Eq. (40), we have
and
Now, for \(\theta \in [-1, 0)\),
Comparing the coefficients of Eq. (40) and Eq. (43), the following two equations can be obtained:
Then we have
Therefore,
where \(E_{1}\) and \(E_{2}\) are constant vectors to be determined. It follows from Eq. (44) and Eq. (45) that
where \(\eta (\theta )=\eta (0, \theta )\). From Eq. (41) and Eq. (42), one has
Noticing that
and substituting Eq. (48) and Eq. (52) into Eq. (50), we obtain
Thus,
Similarly, we have
with
Therefore, one can compute the following parameters:
In conclusion, we have the following for system (3) based on the results in [32].
Theorem 2
If \(\mu_{2}>0\) (\(\mu_{2}<0\)), then the Hopf bifurcation is supercritical (subcritical); if \(\beta_{2}<0\) (\(\beta_{2}>0\)), then the bifurcating periodic solutions are stable (unstable); if \(T_{2}>0\) (\(T_{2}<0\)), then the period of the bifurcating periodic solutions increases (decreases).
4 Numerical example
In this section, we present a numerical simulation to justify the obtained theoretical results in Section 2 and Section 3. Choosing \(b=5\), \(\beta =0.075\), \(\varrho =0.06\), \(p=0.9\), \(\gamma =0.5\), \(\varepsilon =0.2\) and \(\alpha =0.1\), we consider the following special case of system (3):
from which we get \(b\beta \gamma +pb\beta \varrho +\gamma \varrho \varepsilon =0.2138\), \(\varrho (\gamma +\varrho )(\varepsilon +\alpha +\varrho )=0.0121\). Then we obtain \(I_{*}=26.4638\). Further, \(\varepsilon +\alpha +\varrho =0.36\), \(\frac{pb\beta }{\varrho + \beta I_{*}}=0.1651\), and we obtain the unique viral equilibrium \(P_{*}(2.4452, 10.3180, 26.4638, 44.1063)\) of system (63). Thus, we have \(\omega_{0}=0.3907\), \(\tau_{0}=5.0895\) and \(\lambda^{\prime }(\tau_{0})=0.4743-2.8554i\).
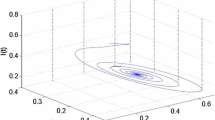
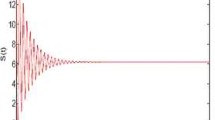
Let \(\tau =4.250\in (0, \tau_{0})\), \(P_{*}(2.4452, 10.3180, 26.4638, 44.1063)\) is asymptotically stable according to Theorem 1 and the dynamic behavior of system (63) is as shown in Figure 1. However, once the value of the time delay τ passes through the critical value \(\tau_{0}=5.0895\), for example, \(\tau =5.375\), \(P_{*}(2.4452, 10.3180, 26.4638, 44.1063)\) will lose its stability and a Hopf bifurcation occurs, and a family of periodic solutions bifurcate from \(P_{*}(2.4452, 10.3180, 26.4638, 44.1063)\). This can be depicted by Figure 2. The bifurcation phenomenon can be also illustrated by the bifurcation diagram in Figure 3.

Dynamic behavior of system ( 63 ): projection on S-E-R with \(\pmb{\tau=4.250}\) .

Dynamic behavior of system ( 63 ): projection on S-E-R with \(\pmb{\tau=5.375}\) .

Bifurcation diagram with respect to τ .
In addition, we obtain \(C_{1}(0)=-1.9265-0.3022i\) by some complex computation with the help of Matlab software package. Thus, based on Eq. (59)-Eq. (62), we get \(\mu_{2}=4.0681>0\), \(\beta_{2}=-3.8530<0\) and \(T_{2}=5.9846>0\). Then, based on Theorem 2, it can be concluded that the Hopf bifurcation at \(\tau_{0}=5.0895\) is supercritical, the bifurcating periodic solutions are stable and the period of the bifurcating periodic solutions increases.
5 Conclusions
By incorporating the time delay due to the latent period of computer viruses in the exposed computers and the time delay due to the period that anti-virus software uses to clean the viruses in the infected computers into the model proposed in the literature [20], a delayed computer virus spreading model is considered in the present paper. Compared with the work in the literature [20], the model considered in this paper is more general, and we mainly investigate the effects of delay on the proposed model.
It has been proved that there exists a stability switch in the delayed computer virus spreading model by taking the delay as the bifurcation parameter. The model is asymptotically stable when the value of the delay is below the critical value, and the viruses can be controlled easily in this case. However, the viruses will be out of control when the delay passes through the critical value. Based on the simulation results, we can conclude that the computer viruses can be controlled by shortening the latent period of the viruses and the period that the anti-virus software uses to clean the viruses.
However, it should be pointed out that our paper focuses on analyzing the effect of the time delay. Other impact factors such as network topology [33] and network eigenvalue [34] to computer virus propagation will be left for our future research. In addition, it is an interesting problem to take both time delay and other key parameter as the bifurcation parameter and investigate the codimension-two bifurcation, such as Hopf-Pitchfork bifurcation [35] of the proposed computer virus model. This is another interesting future research direction for us.
References
Szor, P: The Art of Computer Virus Research and Defense. Addison-Wesley, Reading (2005)
Gordon, LA, Loeb, MP, Lucyshyn, W, et al.: CSI/FBI Crime and Security Survey. Computer Security Institute, San Francisco (2005)
Goldberg, LA, Goldberg, PW, Phillips, CA, et al.: Constructing computer virus phylogenies. J. Algorithms 26, 188-208 (1998)
Kephart, JO, White, SR: Directed-graph epidemiological models of computer viruses. In: Proceedings of the IEEE Computer Society Symposium on Research in Security and Privacy, pp. 343-359 (1991)
Kephart, JO, White, SR: Measuring and modeling computer virus prevalence. In: Proceedings of the IEEE Computer Society Symposium on Research in Security and Privacy, pp. 2-15 (1993)
Mishra, BK, Jha, N: Fixed period of temporary immunity after run of anti-malicious software on computer nodes. Appl. Math. Comput. 190, 1207-1212 (2007)
Piqueira, JRC, Araujo, VO: A modified epidemiological model for computer viruses. Appl. Math. Comput. 213, 355-360 (2009)
Ren, JG, Yang, XF, Zhu, QY, et al.: A novel computer virus model and its dynamics. Nonlinear Anal., Real World Appl. 13, 376-384 (2012)
Ren, JG, Yang, XF, Yang, LX, Xu, Y, et al.: A delayed computer virus propagation model and its dynamics. Chaos Solitons Fractals 45, 74-79 (2012)
Muroya, Y, Enatsu, Y, Li, H: Global stability of a delayed SIRS computer virus propagation model. Int. J. Comput. Math. 91, 347-367 (2014)
Feng, L, Liao, X, Li, H, et al.: Hopf bifurcation analysis of a delayed viral infection model in computer networks. Math. Comput. Model. 56, 167-179 (2012)
Dong, T, Liao, XF, Li, HQ: Stability and Hopf bifurcation in a computer virus model with multistate antivirus. Abstr. Appl. Anal. 2012, Article ID 841987 (2012)
Mishra, BK, Saini, DK: SEIRS epidemic model with delay for transmission of malicious objects in computer network. Appl. Math. Comput. 188, 1476-1482 (2007)
Mishra, BK, Pandey, SK: Dynamic model of worms with vertical transmission in computer network. Appl. Math. Comput. 217, 8438-8446 (2011)
Yang, LX, Yang, XF, Wen, L, et al.: Propagation behavior of virus codes in the situation that infected computers are connected to the Internet with positive probability. Discrete Dyn. Nat. Soc. 2012, Article ID 693695 (2012)
Yang, LX, Yang, XF, Zhu, QY, et al.: A computer virus model with graded cure rates. Nonlinear Anal., Real World Appl. 14, 414-422 (2013)
Yang, LX, Yang, XF, Wen, LS, et al.: A novel computer virus propagation model and its dynamics. Int. J. Comput. Math. 89, 2307-2314 (2012)
Kumar, M, Mishra, BK, Panda, TC: Stability analysis of a quarantined epidemic model with latent and breaking-out over the Internet. Int. J. Hybrid Inf. Technol. 8, 133-148 (2015)
Upadhyay, RK, Kumari, S, Misra, AK: Modeling the virus dynamics in computer network with SVEIR model and nonlinear incident rate. J. Appl. Math. Comput. 54, 485-509 (2017)
Xu, YH, Ren, JG: Propagation effect of a virus outbreak on a network with limited anti-virus ability. PLoS ONE. 2016, Article ID e0164415 (2016)
Meng, XY, Huo, HF, Zhang, XB, et al.: Stability and Hopf bifurcation in a three-species system with feedback delays. Nonlinear Dyn. 64, 349-364 (2011)
Meng, XY, Huo, HF, Xiang, H: Hopf bifurcation in a three-species system with delays. J. Appl. Math. Comput. 35, 635-661 (2011)
Zhang, JF: Bifurcation analysis of a modified Holling-Tanner predator-prey model with time delay. Appl. Math. Model. 36, 1219-1231 (2012)
Liu, J: Dynamical analysis of a delayed predator-prey system with modified Leslie-Gower and Beddington-DeAngelis functional response. Adv. Differ. Equ., 2014, Article ID 314 (2014)
Meng, XY, Huo, HF, Zhang, XB: Stability and global Hopf bifurcation in a delayed food web consisting of a prey and two predators. Commun. Nonlinear Sci. Numer. Simul. 16, 4335-4348 (2011)
Jana, D, Agrawal, R, Upadhyay, RK: Top-predator interference and gestation delay as determinants of the dynamics of a realistic model food chain. Chaos Solitons Fractals 69, 50-63 (2014)
Xue, YK, Li, TT: Stability and Hopf bifurcation for a delayed SIR epidemic model with logistic growth. Abstr. Appl. Anal. 2013, Article ID 916130 (2013)
Liu, J: Hopf bifurcation analysis for an SIRS epidemic model with logistic growth and delays. J. Appl. Math. Comput. 50, 557-576 (2016)
Xu, R, Ma, ZE: Stability of a delayed SIRS epidemic model with a nonlinear incidence rate. Chaos Solitons Fractals 41, 2319-2325 (2009)
Han, X, Tan, Q: Dynamical behavior of computer virus on Internet. Appl. Math. Comput. 217, 2520-2526 (2010)
Chen, LJ, Hattaf, K, Sun, JT: Optimal control of a delayed SLBS computer virus model. Physica A 427, 244-250 (2015)
Hassard, BD, Kazarinoff, ND, Wan, YH: Theory and Applications of Hopf Bifurcation. Cambridge University Press, Cambridge (1981)
Feng, LP, Song, LP, Zhao, QS, et al.: Modeling and stability analysis of worm propagation in wireless sensor network. Math. Probl. Eng. 2015, Article ID 129598 (2015)
Gan, C: Modeling and analysis of the effect of network eigenvalue on viral spread. Nonlinear Dyn. 84, 1727-1733 (2016)
Dong, T, Liao, XF, Huang, TW, et al.: Hopf-pitchfork bifurcation in an inertial two-neuron system with time delay. Neurocomputing 97, 223-232 (2012)
Acknowledgements
The authors are grateful to the editor and the anonymous referees for their valuable comments and suggestions on the paper. This research was supported by the Natural Science Foundation of Anhui Province (Nos. 1608085QF145) and the Natural Science Foundation of the Higher Education Institutions of Anhui Province (No. KJ2014A006).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Authors’ contributions
All authors contributed equally to the writing of this paper. All authors read and approved the final manuscript.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Zhao, T., Bi, D. Hopf bifurcation of a computer virus spreading model in the network with limited anti-virus ability. Adv Differ Equ 2017, 183 (2017). https://doi.org/10.1186/s13662-017-1243-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-017-1243-x