
Abstract
We present a mean-square exponential stability analysis for impulsive stochastic genetic regulatory networks (GRNs) with time-varying delays and reaction-diffusion driven by fractional Brownian motion (fBm). By constructing a Lyapunov functional and using linear matrix inequality for stochastic analysis we derive sufficient conditions to guarantee the exponential stability of the stochastic model of impulsive GRNs in the mean-square sense. Meanwhile, the corresponding results are obtained for the GRNs with constant time delays and standard Brownian motion. An example is presented to illustrate our results of the mean-square exponential stability analysis.
Similar content being viewed by others


1 Introduction
A genetic regulatory network (GRN) is a dynamic system to depict the interactions between genes (mRNA) and proteins. Since GRNs play a key role in the area of cell and molecular biology, they have received increasing attention in the community of mathematical biology in recent years (see references [1–10]). An important topic related to mathematical analysis of GRNs is to investigate the stability of GRNs. Wu et al. [1] and Wang [3] conducted robust stability analysis of GRNs by using stochastic analysis approach. Wang et al. [6] investigated the mean-square exponential stability of stochastic GRNs with time-varying delays by constructing a Lyapunov-Krasovskii functional. Although this stability analysis leads to conclusions on whether solutions of GRNs converge to an equilibrium point when a GRN system becomes stable, this analysis does not give the convergence rate of the system. For many GRN systems, slow convergence rates are undesirable, and high convergence rates (e.g., exponential rates) are needed. Therefore, it is necessary to study the exponential stability for a GRN system.
The aim of this study is to investigate the mean-square exponential stability of the solution of a GRN model with diffusion process, impulses, degradation reactions, time-varying delays, and fBm of extrinsic noise. Stability analysis for such a comprehensive GRN model is rare in the literature. For example, Wu et al. [1], Wang [3], Wang et al. [4], and Wang et al. [5] studied the stability and convergence of GRNs with stochastic perturbation and time delays but without diffusion and reaction. Although Ma et al. [9, 10] investigated the asymptotic stability of GRNs with diffusion, reaction, and delays, the systems of their study [9, 10] are deterministic. In [7], finite-time robust stochastic stability was considered under stochastic perturbation, reaction, diffusion, and delays. In addition, like in [1, 3–5], the stochastic perturbation in [7] was described using a standard Brownian motion instead of a fractional Brownian motion.
Our study uses fBm to describe extrinsic noise introduced into the GRNs for mean-square exponential stability analysis, which is a novelty of this paper. We denote an fBm as \(B^{H}(t)\), where H is the Hurst parameter. The fBm has a long-memory in comparison with standard Brownian motion (\(H=\frac{1}{2}\)) [11]. In [12], it was shown that a fractional Brownian motion can be used to describe a subdiffusive dynamics process. Experimental data of chromatin mobilizations show that an fBm is more appropriate to model gene movements than a standard Brownian motion [13]. Therefore, introducing the long-term correlations described by an fBm in GRNs is an important contribution to the literature.
Another contribution of this study is to introduce impulses into stochastic GRNs to describe sudden changes in the amount of mRNA and proteins. According to [14–16], an impulse is referred to the phenomenon that a system state is changed abruptly at a given time. The changes may be caused by abrupt change of physical environments, such as intake of drug or nutriment and exertion of the external force. For example, it was pointed out in [17] that metaphase progression can be controlled by external mechanical impulses through different mechano-chemical cellular reactions. We have not found references of stability analysis of stochastic GRNs with impulses. Therefore, out study differs from the existing studies (e.g., Zhou et al. [7], Wang et al. [4], Ma et al. [9], Han et al. [10]) on the following two aspects: (a) a diffusion-reaction process driven by a fractional Brownian motion is considered, and (b) the impulses are involved.
The rest of this paper is organized as follows: In Section 2, we introduce the impulsive stochastic GRNs and define the exponential stability. Sufficient conditions of exponential stability in the mean-square sense for trivial solutions of GRNs are established in Section 3. Section 4 illustrates our analysis by a numerical example.
2 GRNs and preliminaries
In Section 2.1, we first define a deterministic GRN with time-varying delays and then introduce an impulse and stochastic perturbation into the deterministic model to define the model that is investigated in this study. The preliminaries needed for the exponential stability analysis are given in Section 2.2.
2.1 Deterministic and stochastic GRNs
A deterministic GRN is defined as follows [10]:
where \(\tilde{m}_{i}(t,x)\) and \(\tilde{p}_{i}(t,x)\) denote the concentrations of the ith mRNA and protein, respectively; \(x=(x_{1}, x_{2}, \ldots, x_{l})^{T}\in Q\subset R^{l}\); \(Q = \{x: |x|\leq L_{k}, k=1,2, \ldots, l\}\) is a compact set in \(R^{n}\) with smooth boundary ∂Q; \(L_{k}\) is a positive constant; \(D_{ik}>0\) and \(D_{ik}^{*}>0\) are diffusion coefficient matrices of mRNA and protein, respectively; \(b_{i}\) is a constant; \(a_{i}\) and \(c_{i}\) represent the degradation rates of the mRNA and protein, respectively; \(w_{ij}\) is defined as follows:
where \(\delta_{ij}\) is the dimensionless transcriptional rate of transcriptional factor j to gene i; \(g_{j}\) is the activation function of the \(g_{j}(s) = \frac{s^{h}}{1+s^{h}}\), where h is the Hill coefficient; \(q_{i} = \sum_{j\in I_{j}}\delta_{ij}\), where \(I_{j}\) denote the set of all repressors of gene j; and \(\sigma(t)\) and \(\tau(t)\) are the time-varying delays satisfying
where τ̄, σ̄, \(\mu_{1}\), and \(\mu_{2}\) are nonnegative real numbers, and \(\bar{\mu} = \mu_{1}\vee\mu_{2}\) is assumed.
Considering the time delays, we can give the initial conditions associated with (1) as follows:
where \(d = \bar{\sigma}\vee\bar{\tau}\), and \(\varphi_{i}(t,x), \varphi _{i}^{*}(t,x) \in C^{1}([-d,0]\times Q,R)\). Moreover, the following Dirichlet boundary conditions are considered:
Let \(m^{*}=(m_{1}^{*}, m_{2}^{*}, \ldots, m_{n}^{*})\) and \(p^{*}=(p_{1}^{*}, p_{2}^{*}, \ldots, p_{n}^{*})\) denote the unique solution of (1) and the equilibrium point \((m^{*}, p^{*})\) of system (1) to the origin. Using the transformations \(m_{i} = \tilde{m}_{i}-m_{i}^{*}\) and \(p_{i} = \tilde{p}_{i}-p_{i}^{*}\) (\(i=1,2,\ldots,n\)), we can transform (1) into the matrix form as follows:
where
Now we introduce impulses and stochastic perturbation into account, and equations (3) become
where \(m(t_{k}^{+},x) = \lim_{t\rightarrow t_{k}^{+}}m(t,x)\), \(p(t_{k}^{+},x) = \lim_{t\rightarrow t_{k}^{+}}p(t,x)\), \(t_{k}\) represent the moments when impulses occur, \(t_{k}< t_{k+1}\), \(\lim_{t\rightarrow\infty} t_{k} =\infty\), and \(B^{H}(t)\) denotes an n-dimensional fBm with Hurst parameter \(H\in (0,\frac{1}{2}]\).
2.2 Preliminaries
In this section, we introduce some necessary definitions, assumptions, and lemmas needed for the subsequent discussion. Let \((\varOmega , \mathscr {F},P)\) be a complete probability space with filtration \(\{\mathscr {F}_{t}\}_{t\geq0}\) satisfying the usual conditions (i.e., it is increasing and right continuous, and \(\mathscr{F}_{0}\) contains all P-null sets). For convenience, let \(A^{T}\) denotes the transpose of a matrix A, \(\lambda_{\max}(A)\) and \(\lambda_{\min}(A)\) denote the largest and smallest eigenvalues of a square matrix A, respectively.
The vector norm \(\Vert \cdot \Vert \) is defined as
and for a real square matrix \(A=(a_{ij})_{n\times n}\), its norm \(\Vert A\Vert _{p}\) (\(p=1,2,\infty\)) is defined as
and we write \(\Vert A\Vert _{p} = \Vert A\Vert \) (\(p=1,2,\infty\)) without causing any confusion.
Definition 1
According to [18], the trivial solution of system (4) with initial values \(\varphi(t,x)\), \(\varphi^{*}(t,x)\in C^{1}([-d,0]\times Q,R^{n})\) is said to be exponentially stable in the mean-square sense if there exist constants \(\alpha, \alpha', M, M' > 0\) such that
where
Furthermore, we assume that \(\Vert \psi \Vert = \Vert \varphi \Vert \vee \Vert \varphi^{*}\Vert \). As a result, the following lemma follows directly from Green’s second identity [19].
Lemma 1
Let \(R_{1}>0\) and \(R_{2} >0\) be a pair of diagonal matrices. Then
Lemma 2
Let \(x,y\in R^{n}\) be two n-dimensional column vectors, and \(A_{3}=(a_{ij})\in R^{n\times n}\) be a positive definite matrix. Then we have
where \(A_{4} = \frac{1}{2}\operatorname{diag} ( \sum_{i}|a_{i1}|, \sum_{i}|a_{i2}|, \ldots, \sum_{i}|a_{in}| )\) and \(A_{5} = \frac{1}{2}\operatorname{diag} ( \sum_{i}|a_{1i}|, \sum_{i}|a_{2i}|, \ldots, \sum_{i}|a_{ni}| )\) are positive definite diagonal matrices, and \(|a|\) is the absolute value of a real number a.
Proof
The proof is completed. □
To investigate the mean-square exponential stability of trivial solution for system (4), we introduce the following conditions:
- (A1):
-
The function \(f(p(t,x))\) satisfies the Lipschitz condition: there exists a positive constant K such that
$$ \bigl\Vert f\bigl(p(t,x)\bigr)-f\bigl(p(s,x)\bigr)\bigr\Vert \leq K\bigl\Vert p(t,x)-p(s,x)\bigr\Vert , \quad \forall s,t\in[0,+\infty). $$ - (A2):
-
The noise intensity \(S(t,m(t,x),p(t,x))\) in equation (4) satisfies the condition
$$\begin{aligned}& \operatorname{trace}\bigl[S^{T}\bigl(t,m(t,x),p(t,x)\bigr)S \bigl(t,m(t,x),p(t,x)\bigr)\bigr] \\& \quad \leq m^{T}(t,x)A_{1}m(t,x)+p^{T}(t,x)A_{2}p(t,x), \end{aligned}$$where \(A_{1}\) and \(A_{2}\) are known matrices.
- (A3):
-
There exist positive definite matrices \(P_{1}\), \(P_{2}\), \(Q_{1}\), \(Q_{2}\) such that the following linear matrix inequalities are satisfied:
$$ \begin{aligned} &{-}\frac{\pi^{2}}{2}P_{1}D_{L} - 2P_{1}A + 2Q_{3} + \frac{2}{1-\bar{\mu}}Q_{6} + Ht^{2H-1}Q_{1} >0, \\ &{-}\frac{\pi^{2}}{2}P_{2}D_{L}^{*} - 2P_{2}C + 2Q_{5} + \frac{2K}{1-\bar{\mu}}Q_{4} + Ht^{2H-1}Q_{2}>0, \end{aligned} $$(5)where \(Q_{3}\), \(Q_{4}\), \(Q_{5}\), \(Q_{6}\) of the same forms as \(A_{4}\), \(A_{5}\) in Lemma 2 are positive definite diagonal matrices, and
$$\begin{aligned}& D_{L} = \operatorname{diag} \Biggl( \sum _{k=1}^{l}\frac{D_{1k}}{L_{k}^{2}}, \sum _{k=1}^{l}\frac {D_{2k}}{L_{k}^{2}}, \ldots,\sum _{k=1}^{l}\frac{D_{nk}}{L_{k}^{2}} \Biggr), \\& D_{L}^{*} = \operatorname{diag} \Biggl( \sum _{k=1}^{l}\frac{D_{1k}^{*}}{L_{k}^{2}}, \sum _{k=1}^{l}\frac{D_{2k}^{*}}{L_{k}^{2}}, \ldots, \sum _{k=1}^{l}\frac {D_{nk}^{*}}{L_{k}^{2}} \Biggr). \end{aligned}$$ - (A4):
-
\(\rho\equiv\sup_{k\in N}(t_{k}-t_{k-1})<\infty\),
$$ 0< \lambda\rho< -\ln \biggl[\lambda_{5}( \beta_{1}+\beta_{2})+\frac{d}{1-\bar{\mu }} ( \lambda_{6}K+\lambda_{7} ) \biggr], $$(6)where \(\beta_{1}\equiv\sup_{k\in N}\Vert I+U_{k}\Vert ^{2}\), \(\beta_{2}\equiv\sup_{k\in N}\Vert I+V_{k}\Vert ^{2}\), \(\lambda_{5}=\max\{\lambda_{\max}(P_{1}), \lambda_{\max }(P_{2})\}\), \(\lambda_{6}=\lambda_{\max}(Q_{4})\), \(\lambda_{7}=\lambda_{\max}(Q_{6})\).
- (A4∗):
-
\(\rho\equiv\sup_{k\in N}(t_{k}-t_{k-1})<\infty\), \(0<\lambda\rho <-\ln [\lambda_{5}(\beta_{1}+\beta_{2})+ d ( \lambda_{6}K+\lambda _{7} ) ]\).
- (A5):
-
There exists a positive constant η such that
$$ \frac{\ln(1/\lambda_{4})}{t_{k}-t_{k-1}}\leq\eta\leq\alpha,\quad k=1,2,\ldots, $$(7)where \(\lambda_{4}=\min\{\lambda_{\min}(P_{1}), \lambda_{\min}(P_{2}) \}\), and α will be defined in (21).
3 Exponential stability
In this section, we establish conditions of the exponential stability for system (4) by constructing a suitable Lyapunov function.
Theorem 1
If assumptions (A1)-(A5) hold, then the trivial solution of system (4) is globally exponentially stable in the mean-square sense.
Proof
Define a Lyapunov function as follows:
where
Using Itô’s formula, we have
According to the Dirichlet boundary conditions, Green’s formula, and Lemma 1, we have
where n denotes the outer normal vector of ∂Q, and
Similarly, we get
Substituting (9) and (10) into (8) and using Lemma 2, we obtain
Now, we calculate the differential of \(V_{2}(t)\) and \(V_{3}(t)\):
and
where Lemma 2 is applied. Combining (11), (12), and (13) and taking the expectation of both sides, we derive that
where \(\varPi _{1} = -\frac{\pi^{2}}{2}P_{1}D_{L} - 2P_{1}A + 2Q_{3} + \frac{2}{1-\bar {\mu}}Q_{6} + Ht^{2H-1}Q_{1}\), \(\varPi _{2} = -\frac{\pi^{2}}{2}P_{2}D_{L}^{*} - 2P_{2}C + 2Q_{5} + \frac{2K}{1-\bar{\mu}}Q_{4} + Ht^{2H-1}Q_{2}\). This implies that
where \(\lambda_{1} = \lambda_{\max}(\varPi _{1})\), \(\lambda_{2} = \lambda_{\max }(\varPi _{2})\), and \(\lambda_{3} = \max\{\lambda_{1}, \lambda_{2}\}\).
On the other hand, for \(V(t,m(t,x),p(t,x))\), we have the estimates
and
where \(\lambda_{5}\), \(\lambda_{6}\), \(\lambda_{7}\), and \(\lambda_{4}\) were defined in assumption (A4) and (A5), respectively. Thus, we obtain
Substituting (17) into (15), we have
where \(\lambda=\frac{\lambda_{3}}{\lambda_{4}}\). Integrating the both sides of inequality (18) from \(t_{k-1}\) to t (\(t\in(t_{k-1},t_{k}]\), \(k=1,2,\ldots\)), we obtain
and
We define the function r as follows:
Then, we have
and \(r(z)\rightarrow+\infty\) (\(z\rightarrow+\infty\)). Moreover, from (6) we have \(r(0)<0\). Thus, there exists a unique positive number α such that \(r(\alpha) = 0\), that is,
For \(t\in[0,t_{1}]\), we have by (19) that
Therefore,
where \(M_{1} = (2\lambda_{5} + \frac{d}{1-\bar{\mu}}[\lambda_{6}K + \lambda_{7}] )e^{(\lambda+\alpha)\rho}>0\), and α is defined in (21). Similarly, we can conclude that
Equations (22) and (23) then yield
From the last two equations of system (4) we conclude that
Thus, according to (21)-(25), we have
Now, we will show that
It is obvious that (27) is true when \(k=1\) by (26). We assume that (27) holds for \(k=i\), that is,
Then, for \(t\in(t_{i},t_{i+1}]\), we get
Similarly, we have
In addition, from (28) and (29) it follows directly that
By (21), (25), and (28)-(30) we obtain
which shows that (27) holds for \(k = i+1\). Therefore, (27) is true for every \(k=1,2,\ldots \) . Hence, for \(t\in(t_{k},t_{k+1}]\), we can conclude by (27) that
Similarly, we have
which, together with (22), (23), and (31), show that the trivial solution of system (4) is globally exponentially stable in the mean square sense. □
Remark 1
If the time delays are constant functions with respect to t, that is, \(\tau(t) =\tau\), \(\sigma(t) = \sigma\), then Theorem 1 reduces to the following result.
Corollary 1
If assumptions (A1)-(A3), (A4∗), and (A5) hold, then the trivial solution of system (4) with \(\tau(t) =\tau\), \(\sigma(t) = \sigma\) is globally exponentially stable in the mean-square sense.
Remark 2
Because the fBm becomes the standard Brownian motion when \(H = \frac{1}{2}\), the exponential stability conditions derived in Theorem 1 for the GRNs with fBm will become mean-square exponential stability conditions for the GRNs with standard Brownian motion, which, to the best our knowledge, has not been reported in the literature. Based on Theorem 1, the following result for the GRNs with standard Brownian motion can be obtained.
Corollary 2
If assumptions (A1), (A2), (A4), and (A5) hold and Eq. (5) in (A3) is replaced by the equations
then the trivial solution of system (4) is globally exponentially stable in the mean-square sense.
4 Numerical simulations
In this section, we illustrate our results in a numerical example. Without loss of generality, we consider a two-dimensional system (\(n=2\), \(l=1\)) and choose the parameters of system (4) as follows:
By using MATLAB to solve the inequalities given in conditions (A1)-(A5), we get the following feasible solution:
We know that the conditions of Theorem 1 are satisfied. By Theorem 1 we can conclude that the trivial solution of system (4) is exponential stability in the mean-square sense.
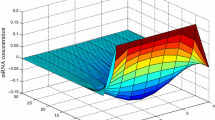
In order to show the exponential stability of the trivial solution of system (4), the system is solved numerically using the Euler method. The numerical results are presented in Figures 1-4. Figures 1(b), 2(b), 3(b), 4(b) plot the exponential stability of the trivial solution at \(x=0.2\). The four figures show that the concentrations of both mRNA and protein are exponentially stable, indicating effectiveness of the results derived in Theorem 1.

Contour plot and sectional view of mRNA concentration \(\pmb{m_{1}(t,x)}\) .

Contour plot and sectional view of mRNA concentration \(\pmb{m_{2}(t,x)}\) .

Contour plot and sectional view of protein concentration \(\pmb{p_{1}(t,x)}\) .

Contour plot of and sectional view protein concentration \(\pmb{p_{2}(t,x)}\) .
5 Conclusions
In this paper, we analyze the mean-square exponential stability for the comprehensive GRNs with (a) diffusion-reaction, (b) time-varying delay, (c) impulsive control, and (d) fBm for extrinsic noise. The stability analysis is a more challenging than the previous analysis reported in the literature that considered only one or two of the four model components. Our derived conditions of the mean-square exponential stability have a simple form and can be used for evaluating the exponential stability of GRNs in a numerically straightforward manner.
Change history
17 November 2017
In the publication of this article (Cao et al. in Adv. Differ. Equ. 2017:307, 2017), there was an error that the author Anke Meyer-Baese was missing. Anke Meyer-Baese contributed towards the methodological design, study concept, the biological interpretation of the parameters of the systems and the writing of the system’s description. Omission is due to an oversight.
References
Wu, H, Liao, H, Guo, S, Feng, W, Wang, Z: Stochastic stability for uncertain genetic regulatory networks with interval time-varying delays. Neurocomputing 72, 3263-3276 (2009)
Vembarasan, V, Nagamani, G, Balasubramaniam, P, Park, JH: State estimation for delayed genetic regulatory networks based on passivity theory. Math. Biosci. 244, 165-175 (2013)
Wang, W: Robust stability analysis of stochastic delayed genetic regulatory networks with polytopic uncertainties and linear fractional parametric uncertainties. Commun. Nonlinear Sci. Numer. Simul. 19, 1569-1581 (2014)
Wang, L, Luo, Z-P, Yang, H-L, Cao, J: Stability of genetic regulatory networks based on switched systems and mixed time-delays. Math. Biosci. 278, 94-99 (2016)
Wang, W, Nguang, SK, Zhong, S, Liu, F: Exponential convergence analysis of uncertain genetic regulatory networks with time-varying delays. ISA Trans. 53, 1544-1553 (2014)
Wang, Z, Liao, X, Guo, S, Wu, H: Mean square exponential stability of stochastic genetic regulatory networks with time-varying delays. Inf. Sci. 181, 792-811 (2011)
Zhou, J, Xu, S, Shen, H: Finite-time robust stochastic stability of uncertain stochastic delayed reaction-diffusion genetic regulatory networks. Neurocomputing 74, 2790-2796 (2011)
Chen, W, Wang, W: Positive periodic solutions for a model of gene regulatory system with time-varying coefficients and delays. Adv. Differ. Equ. 2016, 63 (2016)
Ma, Q, Shi, G, Xu, S, Zou, Y: Stability analysis for delayed genetic regulatory networks with reaction-diffusion terms. Neural Comput. Appl. 20, 507-516 (2011)
Han, Y, Zhang, X, Wang, Y: Asymptotic stability criteria for genetic regulatory networks with time-varying delays and reaction-diffusion terms. Circuits Syst. Signal Process. 34, 3161-3190 (2015)
Biagini, F, Hu, Y, Øksendal, B, Zhang, T: Stochastic Calculus for Fractional Brownian Motion and Applications. Springer, London (2008)
Magdziarz, M, Weron, A, Burnecki, K, Klafter, J: Fractional Brownian motion versus the continuous-time random walk: a simple test for subdiffusive dynamics. Phys. Rev. Lett. 103, 180602 (2009)
Kang, J, Xu, B, Yao, Y, Lin, W, Hennessy, C, Fraser, P, Feng, J: A dynamical model reveals gene co-localizations in nucleus. PLoS Comput. Biol. 7, e1002094 (2011)
Song, Q, Yan, H, Zhao, Z, Liu, Y: Global exponential stability of impulsive complex-valued neural networks with both asynchronous time-varying and continuously distributed delays. Neural Netw. 81, 1-10 (2016)
Gao, L, Wang, D, Wang, G: Further results on exponential stability for impulsive switched nonlinear time-delay systems with delayed impulse effects. Appl. Math. Comput. 268, 186-200 (2015)
Wu, S-L, Li, K-L, Zhang, J-S: Exponential stability of discrete-time neural networks with delay and impulses. Appl. Math. Comput. 218, 6972-6986 (2012)
Itabashi, T, Ishiwata, S: Chromosome segregation controlled by external mechanical impulse in a mammalian cell. Biophys. J. 102(3), 346a (2012)
Mao, X: Stochastic Differential Equations and Applications, 2nd edn. Horwood, Chichester (2007)
Strauss, WA: Partial Differential Equations: An Introduction, 2nd edn. Wiley, New York (2008)
Acknowledgements
The research was supported in part by the National Natural Science Foundation of China (Nos. 11461053 and 11661064) and the Innovation Project of Ningxia University (GIP201624). The third author was supported in part by the DOE Early Career Award DE-SC0008272 and NSF-EAR grant 1552329.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors have equal contributions to the writing of this paper. All authors have read and approved the final version of the manuscript.
A correction to this article is available online at https://doi.org/10.1186/s13662-017-1425-6.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Cao, B., Zhang, Q. & Ye, M. Exponential stability of impulsive stochastic genetic regulatory networks with time-varying delays and reaction-diffusion. Adv Differ Equ 2016, 307 (2016). https://doi.org/10.1186/s13662-016-1033-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-016-1033-x