
Abstract
The paper is concerned with periodic solutions of a model of gene regulatory system with time-varying coefficients and delays. We establish some sufficient conditions for the existence, positivity, and permanence of solutions, which help to derive the global exponential stability of positive periodic solutions for this model. Our method depends on differential inequality technique and Lyapunov functional. At last, we give an example and its numerical simulations to verify theoretical results.
Similar content being viewed by others


1 Introduction
In order to explain the complex dynamic behavior of genetic regulatory systems, the authors of [1] presented a model of ordinary differential system for the transcript factors (TFs). Furthermore, taking account of the delay between changes in the transcription rate of either gene and changes in the concentration of the corresponding protein, Smolen et al. [2] generalized the ordinary differential system to the following delayed differential system:
where [TF-A] denotes the level of the transcriptional activators, [TF-R] denotes the level of the protein that represses transcription by binding to TA-REs (the responsive elements of the TFs), \(k_{1,f}\) is the maximal transcription rate of TF-A, \(k_{2,f}\) is the maximal synthesis rate, \(k_{1,d}\) and \(k_{2,d}\) are degradation rates, \(K_{1,d}\) and \(K_{2,d}\) are the dissociation constants of TF-A dimer from TF-REs, r is a basal rate of synthesis of activator at negligible dimer concentration, and \(K_{R,d}\) is the dissociation constant of TF-R monomers from TF-REs. For simplicity, letting
system (1.1) can be translated to
Recently, the authors of [3] and [4] studied Hopf bifurcation and global attractivity of system (1.2), respectively. Moreover, in the past decade, a great deal of mathematical effort in other gene regulatory network models has been devoted to the study of stability and bifurcations (see references [5–12]). However, limited work has been done on the global exponential stability of positive periodic solutions for genetic regulatory system (1.2) with time-varying coefficients and delays. Thus, considering that parameters periodically vary due to changes of external environment, we modify the genetic regulatory system (1.2) as follows:
where q, r, τ, \(k_{1}\), \(k_{2}\), \(l_{1}\), \(l_{2}\), \(p_{1}\), \(p_{2}\) are all nonnegative continuous ω-periodic functions.
In the real-world phenomena, the periodic variation of the environment (e.g., temperature, moisture, pressure, seasonal effects of weather, reproduction, food supplies, mating habits, etc.) plays a pivotal role in determining the dynamics, so that some classic models, such as the Nicholson blowflies model [13, 14], hematopoiesis model [15, 16], etc., have been generalized to the nonautonomous nonlinear delay differential equation with time-varying coefficients and delays. Consequently, it is worth studying the model of gene regulatory system with time-varying coefficients and delays.
It is convenient to introduce some notation. Given a bounded continuous function f defined on R, we define \(f^{+}\) and \(f^{-}\) as
Let \(R^{n}\) (\(R_{+}^{n}\)) be the set of all (nonnegative) real vectors; by \(x=(x_{1},\ldots,x_{n})^{T}\in R^{n}\) we denote a column vector, in which the symbol \(({}^{T})\) denotes the transpose of a vector. We denote by \(|x|\) the absolute-value vector \(|x|=(|x_{1}|,\ldots,|x_{n}|)^{T}\) and define \(\|x\|=\max_{1\leq i\leq n}|x_{i}|\). For \(\tau^{+}>0\), we denote by \(C= C([-\tau^{+},0], R^{2})\) the Banach space equipped with the supremum norm, that is, \(\|\varphi\|=\sup_{-\tau^{+}\leq t\leq0}\max_{1\leq i\leq2}|\varphi_{i}(t)|\) for all \(\varphi(t)=(\varphi _{1}(t),\varphi_{2}(t))^{T} \in C\). Let \(C_{+}=\{\varphi\in C| \varphi(t)\in R_{+}^{2} \mbox{ for } t\in [-\tau^{+},0]\}\). If \(x_{i}(t)\) is defined on \([t_{0}-\tau^{+},\nu)\) with \(t_{0}, \nu\in R\) and \(i =1,2 \), then we define \(x_{t}\in C \) as \(x_{t}=(x_{t}^{1}, x_{t}^{2} )^{T}\) where \(x^{i}_{t}(\theta)=x_{i}(t+\theta)\) for all \(\theta\in[-\tau^{+} ,0]\) and \(i =1,2\).
It is biologically reasonable to assume that only positive solutions of system (1.3) are meaningful and therefore admissible. The initial conditions associated with system (1.3) are of the form
We denote by \(x_{t}(t_{0}, \varphi)=x(t; t_{0}, \varphi)\) a solution of the initial value problem (1.3) and (1.4). Also, let \([t_{0},\eta(\varphi))\) be the maximal right-interval of the existence of \(x_{t}(t_{0}, \varphi)\).
Definition 1.1
Let \(x^{*}(t)\) be a solution of (1.3). For any given initial value φ that satisfies (1.4), if there are positive constants λ, \(K_{\varphi}\), and \(T_{\varphi}>t_{0}\) such that every solution \(x(t; t_{0},\varphi)\) to system (1.3) satisfies
then \(x^{*}(t)\) is said to be globally exponentially stable.
The objective of this paper is twofold. The first is getting the attracting set for system (1.3). The other is deriving conditions on the existence, uniqueness, and global exponential stability of positive periodic solutions. Finally, we give an example and its numerical simulations to illustrate our main results.
2 Preliminary results
In this section, we derive the following lemmas, which will be used to prove our main results in Section 3.
Lemma 2.1
Suppose that \(r^{-}>0\) and \(l_{i}^{-}>0\) (\(i=1,2\)) and define the positive constants
Then there exists a unique positive global solution \(x(t;t_{0},\varphi)\) to initial value problem (1.3) and (1.4) on the interval \([t_{0}-\tau ^{+},+\infty)\). Moreover, there exist \(t_{0}(\varphi)>t_{0}\) such that for any \(t>t_{0}(\varphi)\),
Proof
Set \(x(t)= x(t; t_{0}, \varphi)=(x_{1}(t),x_{2}(t))^{T} \mbox{ for all } t\in [t_{0},\eta(\varphi)) \). From the variation-of-constants formula we have
for \(t\in[t_{0},t_{0}+\tau^{+}]\).
Since the initial value φ satisfies (1.4), Eq. (2.2) leads to \(x_{i}(t)>0 \) (\(i=1,2\)) for \(t\in[t_{0}, t_{0}+\tau^{+}]\). Then, by the method of steps we obtain that \(x(t;t_{0},\varphi)\) is positive and exists on \([t_{0}-\tau^{+},+\infty)\).
In what follows, we prove that (2.1) holds for \(t>t_{0}(\varphi)\). In view of the first equation of (1.3), we get
and
which, by the comparison principle, imply that there exists \(t_{1}>t_{0}\) such that for any \(t>t_{1}\), \(B_{1}\leq x_{1}(t)\leq C_{1}\). From the second equation of (1.3) we have
which yields that there exists \(t_{2}>t_{1}\) such that for any \(t>t_{2}\), \(x_{2}(t)\leq C_{2}\). So for \(t>t_{2}+\tau^{+}\), \(x_{2}(t)\) satisfies
Consequently, there exists \(t_{3}>t_{2}\) such that for any \(t>t_{3}\), \(x_{2}(t)\geq B_{2}\). The proof is now completed. □
Lemma 2.2
Suppose that \(q^{-}>0\), \(r^{-}>0\), \(l_{i}^{-}>0 \) (\(i=1,2\)), and
where \(D_{i}=\frac {2C_{1}^{3}+2C_{1}(B_{1}^{2}+p_{i}^{-}(1+B_{2}/q^{+}))}{(B_{1}^{2}+p_{i}^{-}(1+B_{2}/q^{+}))^{2}}\), \(E_{i}=\frac{C_{1}^{2}p_{i}^{+}/q^{-}}{(B_{1}^{2}+p_{i}^{-}(1+B_{2}/q^{+}))^{2}}\) (\(i=1,2\)). Moreover, let \(x(t)=x(t;t_{0},\varphi)\), \(\widetilde{x}(t)=\widetilde {x}(t;t_{0},\psi)\). Then, there exist positive constants λ, \(K_{\varphi,\psi}\), and \(t_{\varphi,\psi}>t_{0}\) such that
Proof
For \(i=1,2\), define the continuous functions \(\Gamma _{i}(u)\) as
Then, in view of (2.3), we obtain
which implies that there exist two constants \(\eta>0\) and \(\lambda\in (0,1]\) such that
Set \(y(t)=x(t)-\widetilde{x}(t)=(y_{1}(t),y_{2}(t))^{T}\), where \(y_{i}(t)=x_{i}(t)-\widetilde{x}_{i}(t)\), \(t\in[t_{0}-\tau^{+},+\infty)\), \(i=1,2\). Then
It follows from Lemma 2.1 that there exists \(t_{\varphi,\psi}>t_{0}\) such that
We consider the Lyapunov functional
In view of (2.7), for all \(t>t_{\varphi,\psi}\) and \(i=1,2\), calculating the upper left derivative of \(V_{i}(t)\) along the solution \(y_{i}(t)\) of (2.6), we have
We now claim that
Contrarily, there must exist \(t_{4}>t_{\varphi,\psi} \) and \({i}\in\{1,2\} \) such that
Thus,
which contradicts (2.5). Hence, (2.10) holds. It follows that
The proof is completed. □
3 Main results
In this section, we establish sufficient conditions on the existence, uniqueness, and global exponential stability of positive ω-periodic solutions for system (1.3).
Theorem 3.1
Suppose that all conditions in Lemma 2.2 are satisfied. Then system (1.3) has exactly one positive ω-periodic solution \(\widetilde {x}(t)\). Moreover, \(\widetilde{x}(t)\) is globally exponentially stable.
Proof
Let \(x(t)= x(t; t_{0}, \varphi)=(x_{1}(t),x_{2}(t))^{T} \) be a solution of system (1.3) and (1.4). By Lemma 2.1 we obtain that there exists \(s_{\varphi}>t_{0}\) such that
By the periodicity of coefficients and delay for system (1.3) we have that, for any natural number h,
and
where \(t+(h+1)\omega\in[t_{0},+\infty)\), \(i=1,2\). Thus, for any natural number h, we obtain that \(x(t+(h+1)\omega)=(x_{1}(t+(h+1)\omega ),x_{2}(t+(h+1)\omega))^{T}\) is a solution of system (1.3) for all \(t\geq t_{0}-\tau^{+}-(h+1)\omega\), \(i=1,2\). Hence, \(x(t+\omega)\) (\(t\in[t_{0}-\tau^{+} ,+\infty)\), \(i=1,2\)) is also a solution of system (1.3) with initial values
It follows from the proof of Lemma 2.2 that there exists a constant \(s_{\varphi}>t_{0}\) such that, for any nonnegative integer h and \(t+h\omega\geq s_{\varphi}\),
where \(K_{\varphi}=e^{\lambda s_{\varphi}}(\max_{1\leq i\leq2}\max_{s\in[t_{0}-\tau^{+}, s_{\varphi}]}|x_{i}(s;t_{0},\psi)-x_{i}(s;t_{0},\varphi)|+1)\).
Now, we show that \(x_{i}(t+q\omega;t_{0},\varphi) \) (\(i=1,2\)) is convergent on any compact interval as \(q\rightarrow+\infty\). Let \([a,b]\subset R\) be an arbitrary subset of R. Choose a nonnegative integer \(q_{0}\) such that \(t+q_{0}\omega\geq s_{\varphi}\) for \(t\in[a,b]\). Then, for \(t\in[a,b]\) and \(q>q_{0}\), we have
Then \(x_{i}(t+q\omega)\) converges uniformly to a continuous function, say \(\widetilde{x}_{i}(t)\), on \([a,b]\). Because of arbitrariness of \([a,b]\), we see that \(x_{i}(t+q\omega)\rightarrow \widetilde{x}_{i}(t)\) as \(q\rightarrow+\infty\) for \(t\in R\), \(i=1,2\). Moreover,
It remains to show that \(\widetilde{x}(t)=(\widetilde{x}_{1}(t),\widetilde {x}_{2}(t))^{T}\) is an ω-periodic solution of system (1.3). The periodicity is obvious since
for all \(t\in R\). Now, note that \(x(t+q\omega)\) is a solution to system (1.3), that is,
and
for \(t\geq t_{0}\). Letting \(q\rightarrow+\infty\) gives us
for \(t\geq t_{0}\), that is, \(\widetilde{x}(t)\) is a solution to system (1.3) on \([t_{0}-\tau^{+}, +\infty)\). Finally, from (2.1) and (3.3), again using a similar argument as in the proof (2.12), we can prove that \(\widetilde{x}(t)\) is globally exponentially stable. This completes the proof of the main theorem. □
4 An example
In this section, we give an example and numerical simulations to demonstrate the results obtained in previous sections.
Example 4.1
Considerthe following genetic regulatory system with time-varying coefficients and delays:
Obviously, \(r^{-}=r^{+}=11\), \(q^{-}=q^{+}=1\), \(k_{i}^{-}=0.1\), \(k_{i}^{+}=0.3\), \(l_{i}^{-}=9\), \(l_{i}^{+}=11\), \(p_{i}^{-}=0\), \(p_{i}^{+}=2\) (\(i=1,2\)). From (2.1) and (2.3) we obtain \(B_{1}=1\), \(C_{1}=11.3/9\), \(B_{2}=1/264\), \(C_{2}=0.1/3\), \(D_{i}\approx 6.46968\), \(E_{i}\approx3.15284\) (\(i=1,2\)), and
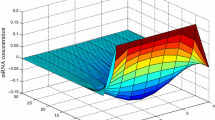
which imply that the genetic regulatory system (4.1) satisfies all conditions of Theorem 3.1. Therefore, system (4.1) has a unique positive 2π-periodic solution \(\widetilde{x}(t)\), which is globally exponentially stable with the exponential convergent rate \(\lambda \approx0.5\). The numerical simulations in Figure 1 strongly support the conclusion.

Numerical solutions \(\pmb{x(t)=(x_{1}(t),x_{2}(t))^{T}}\) of system ( 4.1 ) for initial value \(\pmb{\varphi(s)\equiv(5,4)^{T}, (3,2)^{T}, (0.5,0.5)^{T}}\) , \(\pmb{s\in [-2,0]}\) .
Remark 4.1
To the best of our knowledge, rare authors studied the problems of the global exponential stability of positive periodic solutions for genetic regulatory system with time-varying coefficients and delays. It is obvious that all results in [3, 4] and the references therein cannot be applicable to prove that all solutions of system (4.1) converge exponentially to a positive periodic solution since the system has time-varying coefficients and delays. This implies that the results of this paper are generalization and complement of previously known results.
References
Smolen, P, Baxter, DA, Byrne, JH: Frequency selectivity, multistability, and oscillations emerge from models of genetic regulatory systems. Am. J. Physiol., Cell Physiol. 274(2), 531-542 (1998)
Smolen, P, Baxter, DA, Byrne, JH: Modeling transcriptional control in gene networks-methods, recent results, and future directions. Bull. Math. Biol. 62(2), 247-292 (2000)
Wan, A, Zou, X: Hopf bifurcation analysis for a model of genetic regulatory system with delay. J. Math. Anal. Appl. 356(2), 464-476 (2009)
Chen, S, Wei, J: Global attractivity in a model of genetic regulatory system with delay. Appl. Math. Comput. 232(1), 411-415 (2014)
Cao, J, Jiang, H: Hopf bifurcation analysis for a model of single genetic negative feedback autoregulatory system with delay. Neurocomputing 99, 381-389 (2013)
Wang, K, Wang, L, Teng, Z, Jiang, H: Stability and bifurcation of genetic regulatory networks with delays. Neurocomputing 73, 2882-2892 (2010)
Wang, Z, Liu, Z, Yuan, R: Stability and bifurcation in a gene regulatory network model with delay. Z. Angew. Math. Mech. 92(4), 290-303 (2012)
Zhang, W, Fang, J, Cui, W: Exponential stability of switched genetic regulatory networks with both stable and unstable subsystems. J. Franklin Inst. 350, 2322-2333 (2013)
Liu, P: Robust stability analysis of genetic regulatory network with time delays. ISA Trans. 52, 326-334 (2013)
Xiao, M, Cao, J: Genetic oscillation deduced from Hopf bifurcation in a genetic regulatory network with delays. Math. Biosci. 215, 55-63 (2008)
Zhang, X, Yu, A, Zhang, G: M-Matrix-based delay-range-dependent global asymptotical stability criterion for genetic regulatory networks with time-varying delays. Neurocomputing 113, 8-15 (2013)
Hu, J, Liang, J, Cao, J: Stability analysis for genetic regulatory networks with delays: the continuous-time case and the discrete-time case. Appl. Math. Comput. 220, 507-517 (2013)
Chen, W, Liu, B: Positive almost periodic solution for a class of Nicholson’s blowflies model with multiple time-varying delays. J. Comput. Appl. Math. 235, 2090-2097 (2011)
Liu, B: Global exponential stability of positive periodic solutions for a delayed Nicholson’s blowflies model. J. Math. Anal. Appl. 412, 212-221 (2014)
Wu, X, Li, J, Zhou, H: A necessary and sufficient condition for the existence of positive periodic solutions of a model of hematopoiesis. Comput. Math. Appl. 54, 840-849 (2007)
Liu, B: New results on the positive almost periodic solutions for a model of hematopoiesis. Nonlinear Anal., Real World Appl. 17, 252-264 (2014)
Acknowledgements
We would like to thank the anonymous referees for valuable comments and suggestions that greatly helped us to improve the paper. Financial support by the National Natural Science Foundation of China (grant no. 11301341) and the Natural Scientific Research Fund of Zhejiang Provincial of China (grant no. LY16A010018) is gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
The authors declare that the study was realized in collaboration with the same responsibility. Both authors read and approved the final version.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Chen, W., Wang, W. Positive periodic solutions for a model of gene regulatory system with time-varying coefficients and delays. Adv Differ Equ 2016, 63 (2016). https://doi.org/10.1186/s13662-016-0788-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-016-0788-4