
Abstract
An SEIRS worm propagation model with two delays and vertical transmission in the network is investigated. It is proved that the positive equilibrium is locally asymptotically stable and the Hopf bifurcation can occur when the certain conditions are satisfied by regarding different combination of the two delays as bifurcation parameter. Then the properties of the Hopf bifurcation, such as direction and stability, are studied by using the normal form theory and the center manifold theorem. Finally, some numerical simulations are presented to verify the obtained results and to demonstrate the dynamics of the model.
Similar content being viewed by others


1 Introduction
In recent years, many mathematical models such as SIR model [1–3], SEIR model [4, 5], SEIRS model [6] and some other models [7–10] have been proposed to predict propagation of computer viruses. All the computer virus models above neglect delays in the virus spreading process. As is well known, delays have an important effect on dynamical models and they can cause the occurrence of the Hopf bifurcation. Therefore, it is reasonable to investigate dynamics of the dynamical systems with time delay. In [11], Zhang and Yang studied the following SEIRS worm propagation model with time delay:
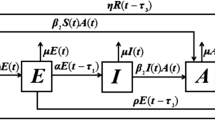
where \(S(t)\), \(E(t)\), \(I(t)\), and \(R(t)\) denote numbers of nodes at time t in states susceptible, exposed, infectious, and recovered, respectively. For the specific meanings of b, d, p, q, β, ε, γ, ζ, and η, one can refer to [11]. τ is the period to clean the worms in one node for the antivirus software and the temporary immunity period of the recovered nodes. It should be pointed out that Zhang and Yang assumed that the period to clean the worms in one node for the antivirus software and the temporary immunity period of the recovered nodes are the same [11] for convenience of analysis. In addition, Zhang and Yang neglected the latent period of worms. Based on this and motivated by the work about dynamics of the dynamical system with two or multiple delays in [12–18], we incorporate the time delay due to the latent period of worms in system (1) and obtain the following system with two delays:
where \(\tau_{1}\) has the same meaning as that of τ in system (1) and \(\tau_{2}\) is the time delay due to the latent period of worms.
The structure of this paper is as follows. Local stability of the positive equilibrium and existence of the Hopf bifurcation are analyzed in Section 2. The direction and the stability of the Hopf bifurcation when \(\tau_{1}\in(0, \tau_{10})\) and \(\tau_{2}>0\) are determined by means of the normal form theory and center manifold theorem in Section 3. Some numerical simulations are carried out in order to demonstrate the theoretical analysis in Section 4. Conclusions and discussions are also included in the last section.
2 Local stability and local Hopf bifurcation
According to the analysis in [11], we know that if
and
system (2) has a unique positive equilibrium \(D_{*}(S_{*}, E_{*}, I_{*}, R_{*})\), with
The Jacobian matrix of system (2) at \(D_{*}\) is
where
Then we can obtain the characteristic equation of system (2)
where
Case 1
\(\tau_{1}=\tau_{2}=0\). Equation (3) becomes
where
According to Routh-Hurwitz criterion, if the condition (H1) equations (5)-(8) hold, \(D_{*}\) is locally asymptotically stable when \(\tau_{1}=\tau_{2}=0\). We have
Case 2
\(\tau_{1}>0\), \(\tau_{2}=0\). Equation (3) becomes
where
Multiplying by \(e^{\lambda\tau_{1}}\), equation (9) becomes
Let \(\lambda=i\omega_{1}\) (\(\omega_{1}>0\)) be a root of equation (10). Then we have
Then we can get
where
Then one can obtain
where
Let \(\omega_{1}^{2}=v_{1}\), then equation (11) becomes
Next, we make the following assumption.
- (H21):
-
Equation (12) has at least one positive root.
If the condition (H21) holds, there exists a positive root \(v_{10}>0\) of equation (12) such that equation (10) has a pair of purely imaginary roots \(\pm i\omega _{10}=\pm i\sqrt{v_{10}}\). Then we can get the corresponding critical value of \(\tau_{1}\) at which a Hopf bifurcation occurs:
Differentiating the two sides of equation (10) with respect to \(\tau_{1}\), we get
Define
Obviously, if the condition (H22) \(P_{2R}Q_{2R}+P_{2I}Q_{2I}\neq 0\) holds, then \(\operatorname {Re}[\frac{d\lambda}{d\tau_{1}}]^{-1}_{\tau_{1}=\tau_{10}}\neq 0\). Therefore, according to the analysis above and the Hopf bifurcation theorem in [19], we have the following.
Theorem 1
Suppose that the conditions (H21)-(H22) hold. The positive equilibrium \(D_{*}(S_{*}, E_{*}, I_{*}, R_{*})\) is locally asymptotically stable for \(\tau_{1}\in[0,\tau_{10})\) and system (2) undergoes a Hopf bifurcation at the positive equilibrium \(D_{*}(S_{*}, E_{*}, I_{*}, R_{*})\) when \(\tau_{1}=\tau_{10}\).
Case 3
\(\tau_{1}=0\), \(\tau_{2}>0\). Equation (3) becomes
where
Let \(\lambda=i\omega_{2}\) (\(\omega_{2}>0\)) be a root of equation (13). Then we get
which leads to
where
The discussion of the distribution of the roots of equation (14) is similar to that in [20]. Thus, we make the following assumption.
- (H31):
-
Equation (14) has at least one positive root.
If the condition (H31) holds, then there exists \(\omega_{20}>0\) such that equation (13) has a pair of purely imaginary roots \(\pm i\omega_{20}\). For \(\omega_{20}\), we have
Differentiating the two sides of equation (13) with respect to \(\tau_{2}\), we get
Further, we get
where \(f_{2}(v_{2})=v_{2}^{4}+e_{33}v_{2}^{3}+e_{32}v_{2}^{2}+e_{31}v_{2}+e_{30}\) and \(v_{2}=\omega_{2}\), \(v_{2*}=\omega_{20}^{2}\).
Obviously, if the condition (H32) \(f_{2}^{\prime}(v_{2*})\neq0\) holds, then \(\operatorname {Re}[\frac{d\lambda}{d\tau_{2}}]^{-1}_{\tau_{2}=\tau_{20}}\neq 0\). Therefore, we have the following.
Theorem 2
Suppose that the conditions (H31)-(H32) hold. The positive equilibrium \(D_{*}(S_{*}, E_{*}, I_{*}, R_{*})\) is locally asymptotically stable for \(\tau_{2}\in[0,\tau_{20})\) and system (2) undergoes a Hopf bifurcation at the positive equilibrium \(D_{*}(S_{*}, E_{*}, I_{*}, R_{*})\) when \(\tau_{2}=\tau_{20}\).
Case 4
\(\tau_{1}=\tau_{2}=\tau>0\). Equation (3) becomes
where
Multiplying by \(e^{\lambda\tau}\), equation (15) becomes
Let \(\lambda=i\omega\) (\(\omega>0\)) be the root of equation (16), then
where
Thus, we have
Similar to the analysis in [21], we can obtain the expression of \(\cos \tau\omega\) from equation (17) when \(\sin\tau\omega=\sqrt{1-\cos^{2}\tau\omega}\) and we denote \(f_{41}(\omega)=\cos\tau\omega\) and \(f_{42}(\omega)=\sin\tau \omega\). Thus, we have the following equation with respect to ω:
Next, we assume the following.
- (H41):
-
Equation (18) has at least one positive root.
If the condition (H41) holds, then equation (18) has one root \(\omega_{0*}>0\) such that equation (16) has a pair of purely imaginary roots \(\pm i\omega_{0*}\). For \(\omega _{0*}>0\), we have
Similarly, we can obtain the expression of \(\cos\tau\omega\) from equation (17) when \(\sin\tau\omega=-\sqrt{1-\cos^{2}\tau\omega}\) and we denote \(f_{43}(\omega)=\cos\tau\omega\) and \(f_{44}(\omega)=\sin\tau \omega\). Thus, we have the equation with respect to ω:
If equation (19) has one positive root \(\omega_{0}^{\prime} \) such that equation (16) has a pair of purely imaginary roots \(\pm i\omega_{0}^{\prime}\), then we can obtain the corresponding critical value of the delay
Let \(\tau_{0}=\text{min}\{\tau_{0*}, \tau_{0}^{\prime}\}\) and let equation (16) have a pair of purely imaginary roots \(\pm i\omega_{0}\) when \(\tau=\tau_{0}\). Taking the derivative with respect to τ on both sides of equation (16), we get
where
Define
Obviously, if the condition (H42) \(P_{4R}Q_{4R}+P_{4I}Q_{4I}\neq 0\) holds, then \(\operatorname {Re}[\frac{d\lambda}{d\tau}]^{-1}_{\tau=\tau_{0}}\neq0\). Therefore, we have the following results according to the Hopf bifurcation theorem in [19].
Theorem 3
Suppose that the conditions (H41)-(H42) hold. The positive equilibrium \(D_{*}(S_{*}, E_{*}, I_{*}, R_{*})\) is locally asymptotically stable for \(\tau\in[0,\tau_{0})\) and system (2) undergoes a Hopf bifurcation at the positive equilibrium \(D_{*}(S_{*}, E_{*}, I_{*}, R_{*})\) when \(\tau=\tau_{0}\).
Case 5
\(\tau_{1}\in(0, \tau_{10})\), \(\tau_{2}>0\). In this case, we choose \(\tau_{2}\) as a bifurcation parameter with \(\tau_{1}\in (0, \tau_{10})\). Let \(\lambda=i\omega_{2*}\) be the root of equation (3), then
where
Thus, we can obtain the following equation with respect to ω:
Similar to the discussion above, we make the following assumption.
- (H51):
-
Equation (20) has at least one positive root.
If the condition (H51) holds, then there exists \(\omega_{2}^{*}>0\) satisfying equation (20) and equation (3) has a pair of purely imaginary roots \(\pm i\omega_{2}^{*}\). For \(\omega _{2}^{*}\), we have
Differentiating the two sides of equation (3) with respect to \(\tau_{2}\), we have
where
Define
Obviously, if the condition (H52) \(P_{5R}Q_{5R}+P_{5I}Q_{5I}\neq 0\) holds, then \(\operatorname {Re}[\frac{d\lambda}{d\tau_{2}}]^{-1}_{\tau_{2}=\tau _{20}^{*}}\neq0\). According to the discussion above, we have the following.
Theorem 4
Suppose that the conditions (H51)-(H52) hold. The positive equilibrium \(D_{*}(S_{*}, E_{*}, I_{*}, R_{*})\) is locally asymptotically stable for \(\tau_{2}\in[0,\tau_{20}^{*})\) and system (2) undergoes a Hopf bifurcation at the positive equilibrium \(D_{*}(S_{*}, E_{*}, I_{*}, R_{*})\) when \(\tau_{2}=\tau_{20}^{*}\).
3 Direction and stability of the Hopf bifurcation
In this section, we shall derive the formulas determining direction and stability of the Hopf bifurcation under the case \(\tau_{1}\in(0, \tau_{10})\) and \(\tau _{2}>0\) by using the normal form theory and the center manifold theorem.
Let \(u_{1}(t)=S(t)-S_{*}\), \(u_{2}(t)=E(t)-E_{*}\), \(u_{3}(t)=I(t)-I_{*}\), \(u_{4}(t)=R(t)-R_{*}\), \(\tau_{2}=\tau_{20}^{*}+\mu\), \(\mu\in R\), and normalize the delay by \(t\rightarrow(t/\tau_{2})\). Throughout this section, we assume that \(\tau_{10}^{*}\in(0, \tau_{10})<\tau_{20}^{*}\). Then system (2) becomes
where \(u_{t}=(u_{1}(t), u_{2}(t), u_{3}(t), u_{4}(t))^{T}\in C=C([-1, 0], R^{4})\) and \(L_{\mu}: C\rightarrow R^{4}\), \(F: R\times C\rightarrow R^{4}\) are given, respectively, by
and
Here
Thus, there exists a matrix function \(\eta(\theta,\mu):[-1, 0]\rightarrow R^{4}\) such that
For \(\phi\in C([-1,0], R^{4})\), we define
and
Then system (21) becomes
Define the adjoint operator \(A^{*}\) of \(A(0)\) as follows:
and a bilinear form is defined by
where \(\eta(\theta)=\eta(\theta, 0)\).
Let \(\rho(\theta)=(1, \rho_{2}, \rho_{3}, \rho_{4})^{T} e^{i\omega_{2}^{*}\tau_{20}^{*}\theta}\) be the eigenvector of A corresponding to \(i\omega_{0}\tau_{0}\) and \(\rho^{*}(s)=D(1, \rho_{2}^{*}, \rho_{3}^{*}, \rho_{4}^{*})e^{i\omega_{2}^{*}\tau_{20}^{*}s}\) be the eigenvector of \(A^{*}\) corresponding to \(-i\omega_{0}\tau_{0}\). According to the definition of \(A(0)\) and \(A^{*}(0)\), we can get
From equation (22), we have
Then we choose
such that \(\langle\rho^{*}, \rho\rangle=1\), \(\langle\rho^{*}, \bar{\rho}\rangle=0\).
Next, we can obtain the coefficients by using the algorithms in [19] and using the computation process used in [22]:
with
where \(E_{1}\) and \(E_{2}\) can be computed by the following equations, respectively:
with
Therefore, we can obtain the following values:
Therefore we have the following result.
Theorem 5
For system (2), if \(\mu_{2}>0\) (\(\mu_{2}<0\)), the Hopf bifurcation is supercritical (subcritical). If \(\beta_{2}<0\) (\(\beta_{2}>0\)) the bifurcating periodic solutions are stable (unstable). If \(T_{2}>0\) (\(T_{2}<0\)), the period of the bifurcating periodic solutions increases (decreases).
4 Numerical simulations
In order to verify the obtained results above, we present a numerical example in this section. We choose the same values of the parameters in [11]. That is, \(b=0.7\), \(d=0.06\), \(p=0.02\), \(q=0.01\), \(\beta=0.1\), \(\varepsilon=0.2\), \(\gamma=0.05\), \(\eta=0.01\), \(\zeta=0.1\). We obtain the following case of system (2):
According to the analysis in [11], we know that system (25) has a unique positive equilibrium \(D_{*}(1.4050, 1.5422, 4.9350, 2.9610)\) and system (25) is locally asymptotically stable when \(\tau_{1}=\tau_{2}=0\).
For \(\tau_{1}>0\), \(\tau_{2}=0\). We have \(\omega_{10}=0.1245\), \(\tau_{10}=13.6109\), and \(\lambda^{\prime}(\tau _{10})=0.0073+0.0299i\). Thus, according to Theorem 1, \(D_{*}\) is asymptotically stable when \(\tau_{1}\in [0, 13.6109)\) and unstable when \(\tau_{1}>13.6109\) and a Hopf bifurcation occurs when \(\tau_{1}=\tau _{10}=13.6109\). This property can be illustrated by the numerical simulations in Figures 1-2. Similarly, we have \(\omega_{20}=0.6322\), \(\tau_{20}=11.9776\). The corresponding waveforms are shown in Figures 3-4.

The track of the states S , E , I , R for \(\pmb{\tau_{1}=10.055<13.6109=\tau_{10}}\) .

The track of the states S , E , I , R for \(\pmb{\tau_{1}=14.965>13.6109=\tau_{10}}\) .

The track of the states S , E , I , R for \(\pmb{\tau_{2}=11.068<11.9776=\tau_{20}}\) .

The track of the states S , E , I , R for \(\pmb{\tau_{2}=13.076>11.9776=\tau_{20}}\) .
For \(\tau_{1}=\tau_{2}=\tau>0\). We can obtain \(\omega_{0}=1.0091\) and \(\tau_{0}=8.8645\) by some complex computations. That is, when τ increases from zero to \(\tau_{0}\), \(D_{*}\) is asymptotically stable when \(\tau\in[0, 8.8645)\). However, when \(\tau>\tau_{0}=8.8645\), \(D_{*}\) will lose its stability and a Hopf bifurcation occurs, which can be verified by the numerical simulations in Figures 5-6.

The track of the states S , E , I , R for \(\pmb{\tau=7.862<8.8645=\tau_{0}}\) .

The track of the states S , E , I , R for \(\pmb{\tau=9.667>8.8645=\tau_{0}}\) .
Finally, we have \(\omega_{2}^{*}=0.6582\) and \(\tau_{20}^{*}=7.855\) for the case when \(\tau_{1}=10.25\in(0, \tau_{10})\), \(\tau_{2}>0\). From Theorem 4, we can conclude that \(D_{*}\) is asymptotically stable when \(\tau_{2}\in[0, 7.855)\) and it will become unstable once \(\tau_{2}\) pass through the critical value \(\tau_{20}^{*}\). This can be illustrated by Figures 7-8. Furthermore, we obtain \(C_{1}(0)=-0.2966-1.0665i\), \(\mu _{2}=0.2206>0\), \(\beta_{2}=-0.5932<0\), \(T_{2}=0.1821>0\). Therefore, by Theorem 5, we know that the Hopf bifurcation is supercritical. The bifurcating periodic solutions are stable and the period of the periodic solutions increases.

The track of the states S , E , I , R for \(\pmb{\tau_{2}=7.650<7.855=\tau_{20}^{*}}\) and \(\pmb{\tau_{1}=10.25\in(0, \tau_{10})}\) .

The track of the states S , E , I , R for \(\pmb{\tau_{2}=9.352>7.855=\tau_{20}^{*}}\) and \(\pmb{\tau_{1}=10.25\in(0, \tau_{10})}\) .
5 Conclusions
In the present paper, we devote our attention to the stability and Hopf bifurcation of an SEIRS epidemic model which describes the transmission of worms in the network through vertical transmission with two delays based on the work in the literature [11]. By regarding the different combinations of the two delays as the Hopf bifurcation parameter, the corresponding critical value of the delay is obtained. When the value of the delay is smaller than the corresponding critical value, the positive equilibrium is asymptotically stable and the propagation of the worms in the network can be predicted and controlled easily in this case. However, a local Hopf bifurcation occurs and a branch of periodic solutions bifurcate from the positive equilibrium when the value of the delay is bigger than the corresponding critical value. Thus, the propagation of the worms becomes unstable and out of control. Therefore, we should take some measures to postpone the onset of the Hopf bifurcation.
It should be noted that the model investigated in this paper assumes that the latent computers have no infection ability. This is not consistent with reality. Therefore, it is more realistic to investigate the dynamics of the following worm propagation model with graded rates:
where \(\beta_{1}\) and \(\beta_{2}\) are the transmission rates of the infective computers and the latent computers, respectively. We leave this as our future work.
References
Qing, SH, Wen, WP: A survey and trends on Internet worms. Comput. Secur. 24, 334-346 (2005)
Wierman, JC, Marchette, DJ: Modeling computer virus prevalence with a susceptible-infected-susceptible model with reintroduction. Comput. Stat. Data Anal. 45, 3-23 (2004)
Feng, LP, Wang, HB, Feng, SQ: Improved SIR model of computer virus propagation in the network. J. Comput. Appl. 31, 1891-1893 (2011) (in Chinese)
Peng, M, He, X, Huang, JJ, et al.: Modeling computer virus and its dynamics. Math. Probl. Eng. 2013, Article ID 842614 (2013)
Yuan, H, Chen, G: Network virus epidemic model with the point-to-group information propagation. Appl. Math. Comput. 206, 357-367 (2008)
Mishra, BK, Pandey, SK: Dynamic model of worms with vertical transmission in computer network. Appl. Math. Comput. 217, 8438-8446 (2011)
Wang, FW, Zhang, YK, Wang, CG, et al.: Stability analysis of a SEIQV epidemic model for rapid spreading worms. Comput. Secur. 29, 410-418 (2010)
Yang, M, Zhang, Z, Li, Q, et al.: An SLBRS model with vertical transmission of computer virus over the Internet. Discrete Dyn. Nat. Soc. 2012, Article ID 925648 (2012)
Mishra, BK, Pandey, SK: Effect of anti-virus software on infectious nodes in computer network: a mathematical model. Phys. Lett. A 376, 2389-2393 (2012)
Mishra, BK, Keshri, N: Mathematical model on the transmission of worms in wireless sensor network. Appl. Math. Model. 37, 4103-4111 (2013)
Zhang, ZZ, Yang, HZ: Stability and Hopf bifurcation in a delayed SEIRS worm model in computer network. Math. Probl. Eng. 2013, Article ID 319174 (2013)
Bianca, C, Ferrara, M, Guerrini, L: The time delays effects on the qualitative behavior of an economic growth model. Abstr. Appl. Anal. 2013, Article ID 901014 (2013)
Xu, CJ, Zhang, QM: Qualitative analysis for Lotka-Volterra model with time delays. WSEAS Trans. Math. 13, 603-614 (2014)
Zhang, ZZ, Yang, HZ: Dynamical analysis for a delayed computer virus model with saturated incidence rate. J. Appl. Math. Comput. 49, 447-473 (2015)
Liu, J: Dynamical analysis of a delayed predator-prey system with modified Leslie-Gower and Beddington-DeAngelis functional response. Adv. Differ. Equ. 2014, 314 (2014)
Cui, GH, Yan, XP: Stability and bifurcation analysis on a three-species food chain system with two delays. Commun. Nonlinear Sci. Numer. Simul. 16, 3704-3720 (2011)
Bianca, C, Guerrini, L: Existence of limit cycles in the Solow model with delayed-logistic population growth. Sci. World J. 2014, Article ID 207806 (2014)
Xu, CJ, Tang, XH, Liao, MX, et al.: Bifurcation analysis in a delayed Lokta-Volterra predator-prey model with two delays. Nonlinear Dyn. 66, 169-183 (2011)
Hassard, BD, Kazarinoff, ND, Wan, YH: Theory and Applications of Hopf Bifurcation. Cambridge University Press, Cambridge (1981)
Zhang, ZZ, Yang, HZ: Dynamical analysis in a delayed predator-prey system with stage-structure for both the predator and the prey. Discrete Dyn. Nat. Soc. 2014, Article ID 909238 (2014)
Zhang, ZZ, Si, FS: Dynamics of a delayed SEIRS-V model on the transmission of worms in a wireless sensor network. Adv. Differ. Equ. 2014, 295 (2014)
Bianca, C, Ferrara, M, Guerrini, L: The Cai model with time delay: existence of periodic solutions and asymptotic analysis. Appl. Math. Inf. Sci. 7, 21-27 (2013)
Acknowledgements
The authors would like to thank the editor and the two anonymous referees for their constructive suggestions on improving the presentation of the paper. This work was supported by Project Of Hubei University of Medicine (2011QDZR-24).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally to the writing of this paper. All authors read and approved the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Wang, C., Chai, S. Hopf bifurcation of an SEIRS epidemic model with delays and vertical transmission in the network. Adv Differ Equ 2016, 100 (2016). https://doi.org/10.1186/s13662-016-0793-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-016-0793-7