
Abstract
Research reveals that most HIV infections come from undiagnosed people and untreated people, but principally from unaware people. Human awareness results in the reduction of susceptibility to infection, naturally, in the epidemiological study this factor should be included. Researchers have produced a wealth of information about the disease, including a number of critical tools and interventions to diagnose, prevent and treat HIV. Broadcast media have tremendous reach and influence, particularly with young people, so in this study, we incorporate the influence of media and investigate the effect of awareness program in disease outbreaks. We divided the whole susceptible and infected populations into two sub-classes: ‘unaware class’ and ‘aware class’. A detailed mathematical analysis has been carried out and numerical simulations have been performed to show the role of some of the important model parameters.
Similar content being viewed by others

1 Introduction
It has been nearly thirty years since the first cases of human immunodeficiency virus (HIV) garnered the world’s attention. Without treatment and awareness, the virus slowly debilitates a person’s immune system until they fall prey to illness. The epidemic has claimed the lives of nearly 35.0 million worldwide [1] and has affected many more. In India, approximately 3.5 million [3.3 to 4.1 million] people are acquiring HIV every year and more than 1.93 to 3.04 million people [2] are living with HIV. Unless we take bold actions, however, we anticipate a new era of rising infections and even greater challenges in serving people living with HIV and higher health care costs.
HIV/AIDS epidemic is a serious, growing public health problem worldwide. The cause is known and the principal routes of transmission understood, but resources for treating HIV infected patients and for combating the spread of the virus are limited. Though the best way of disease control is mass vaccination, but for the case of HIV, the usage of vaccination is very costly and conferred immunities are temporary. We have observed that basic mathematical models [3–8] mainly deal with the interaction between susceptible and infective individuals. In view of controlling HIV/AIDS, there are many antiretroviral therapies (ART) available nowadays [9–14] which help the immune system in preventing the infection even though it is not possible to cure it. There are many other factors such as unsafe sex and low condom usage, injecting drug use, widespread stigma, education, migration and mobility etc. which also affect the wideness of this infectious disease. Awareness programs introduce people with the disease and help them to take precautions to reduce the chances of being infected. Moreover, it is important to mention that awaking people through media in the population results in less interaction between susceptible and infected individuals, which lowers the disease transmission rate into susceptible individuals. So, awareness factor can be considered as a strong tool against the expansion of HIV/AIDS. Saying particulary, awareness factor has a great visitation not only on the behavioral changes in individuals, but it also helps governmental health care interventions to control the spread of the disease HIV/AIDS.
Many mathematical models have been developed to monitor HIV/AIDS and explore the impact of intervention strategies that are being implemented. Misra et al. [15, 16] studied the effect of awareness programs through media on disease dynamics in a variable population with immigration. Van Segbroeck et al. [17] analytically studied the disease dynamics of a well-mixed population with rescaled infectiousness where the contact network reshaping occurs much faster than disease spreading. Recently, Samanta and Chattopadhyay [18] have studied a slow-fast dynamics with the effect of awareness program in disease outbreak.
In this present study, we have analyzed a simple SI network epidemic model to study the impact of awareness programs conducted through media campaigning on the spread of HIV/AIDS in a variable population with immigration. However, these results will fall into the non-network epidemic models category. We assume that the growth rate of the cumulative density of awareness programs driven by media is proportional to the number of the infective present in the population. We also assume that the awareness programs against the disease will alert the susceptible to isolate themselves from infective individuals and to form a separate class. We have formulated the mathematical model and also discuss the equilibrium points and their stability. Lastly, we use an optimal control theory paradigm to our mathematical model, in which the contact processes between unaware susceptible and infected classes with aware susceptible and infected classes are controlled. We also solve the model numerically and then discuss the analytical and numerical results according to biological aspect.
2 Formulation of mathematical model with basic assumptions
We consider a basic HIV model
where \(S(t)\) and \(I(t)\) are the densities of the susceptible and infected populations, respectively, in the region under consideration at any time t. Therefore, the total population is \(N(t)=S(t)+I(t)\). Π is the constant recruitment rate in the susceptible population either by birth or immigration; β is the disease transmission rate; d is the natural death rate of the population and \(\delta_{I}\) is the additional death rate due to HIV infection. It is assumed that the disease spreads due to direct contact between the susceptible and the infective only.
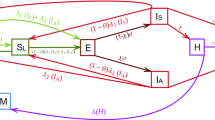
Furthermore, the total susceptible and infected, each population is divided into two sub-classes such that \(S(t)=S_{-}(t)+S_{+}(t)\) and \(I(t)=I_{-}(t)+I_{+}(t)\) due to the awareness programs driven by the media \(M(t)\), where the ‘−’ sign denotes the unaware class and ‘+’ sign represents the aware class. As the awareness disperses, people respond to it and change their behavior to alter their susceptibility. It is also assumed that due to awareness programs, aware susceptible and infected individuals avoid being in contact with the infective, form separate ‘aware classes’ (\(S_{+}(t)\) and \(I_{+}(t)\)) and do not get involved in sexual relations or in any other means that causes AIDS. But due to lack of their memory, a portion of aware people ignore the indemnities and become unaware again. We assume that this transfer rate from aware class to unaware class is \(\lambda_{i} \) (\(i=1,2\)).
On the basis of the above assumptions, system (1) reduces to
with the initial conditions \(S_{-}(0)=S_{0-}\), \(S_{+}(0)=S_{0+}\), \(I_{-}(0)=I_{0-}\), \(I_{+}(0)=I_{0+}\), \(M(0)=M_{0}\), where \(\alpha_{i} \) (\(i=1,2\)) is the contact rate between unaware individuals and media. Awareness programs are implemented proportionally with the change of unaware infective individuals at a rate η and cut down at a rate \(\eta_{0}\) due to their ineffectiveness. Note that aware individuals die out with a lower, but very smaller rate than that of unaware individuals. So, with no loss of generality, we assume that aware susceptible and aware infected classes of people die at the same rates as unaware classes, i.e., d and \(d+\delta_{I}\), respectively. Therefore, \(N=S_{-}+S_{+}+I_{-}+I_{+}\), and using this fact, the above system (2) reduces to
Since the model monitors human populations and media coverage, it is assumed that all the state variables are non-negative at time \(t = 0\). All parameters of the model are assumed to be non-negative. It then follows from the differential equations that the variables are non-negative for all \(t \geq0\). In the absence of HIV infection, \(N \rightarrow\frac{\Pi}{d}\) as \(t \rightarrow\infty\), provided \(N(0) < \frac{\Pi}{d}\). Thus, the following feasible region
is positively invariant. It is therefore sufficient to consider solutions in \(\mathcal{D}\). In this region, the usual existence, uniqueness and continuation results hold for the system.
3 Equilibrium points and stability analysis
In order to obtain equilibrium points, we set all equations of (3) equal to zero as
System (3) has two non-negative equilibria.
3.1 Disease-free equilibrium point
The disease-free equilibrium always exists and is of the form
The linearization of the second, third, fourth and fifth equations of model (3) at the disease-free state \(E^{0}\) can be rewritten in the following form:
where
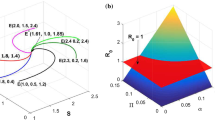
A threshold criterion \(R_{0}\), which is referred to as basic reproductive number, can be derived using the spectral radius of the next-generation matrix [19]. Therefore, to find \(R_{0}\), we must find the largest eigenvalue of \(FV^{-1}\). Thus,
where I is a \(4\times4\) identity matrix.
The characteristic equation of \(FV^{-1}\) is
Thus,
The disease-free equilibrium point \(E^{0}\) always exists, and it is locally asymptotically stable when \(R_{0}<1\) and unstable when \(R_{0}>1\) [20]. We use the threshold \(R_{0}\) to answer the question of whether the infection can be established. When \(R_{0}>1\), HIV infection can take hold. Otherwise the infection will be eliminated.
3.2 Endemic equilibrium point
The endemic equilibrium for system (3) should be in the form \(E^{*}(N^{*}, S^{*}_{+}, I^{*}_{-}, I^{*}_{+}, M^{*})\), in which
\(I^{*}_{-}\) is a positive, real root of the quadratic equation
where
It is clear that if \(A_{3}<0\), then one of the roots of equation (11) will be positive. Also, it is interesting to note that if \(A_{3}<0\) then \(R_{0}\) becomes greater than unity, i.e., \(R_{0}>1\).
Thus, we can conclude the following theorem.
Theorem 3.1
The disease-free equilibrium (DFE) \(E^{0}\) exists and is locally asymptotically stable when \(R_{0}=\frac{\Pi\beta}{d (d+\delta_{I})}<1\). Whenever \(R_{0}=\frac{\Pi\beta}{d (d+\delta_{I})}>1\), \(E^{0}\) becomes unstable and the endemic equilibrium point \(E^{*}\) exists.
4 Optimal control strategy
Optimal control is useful for controlling an epidemiological system. Generally, we solve these types of problems by finding the time-dependent profiles of the control variable to optimize a particular performance. Our target is to maximize the aware susceptible (or aware infected) population by controlling the interaction between unaware susceptible (or unaware infected) through media. Thus, the optimal control problem, where the state system is given by
Here, \(u_{1}(t)\) and \(u_{2}(t)\) represent the control parameters for the interactions between \(S_{-}\) with M and \(I_{-}\) with M, respectively, by invoking awareness among people through media.
Also it is our objective to keep the cost function, measured in terms of time, as low as possible. Thus, the objective function to be minimized is
The parameters \(P>0\) and \(Q>0\) are dimensionless weight functions on the benefit of the cost. These are the costs of per media campaigning for unaware susceptible and unaware infected populations, respectively, per unit time.
In this problem, we are seeking the optimal control pair \((u_{1}^{*},u_{2}^{*})\) such that
where \(U=\{(u_{1}, u_{2}): u_{i} \mbox{ measurable}, 0 \leq u_{i}(t) \leq1, t \in[t_{0}, t_{f} ]\mbox{ for }i=1,2\}\).
To determine the optimal control \(u_{1}^{*}\) and \(u_{2}^{*}\), we use the Pontryagin minimum principle [21]. To solve the problem, we use the Hamiltonian [22, 23] given by
where \(\xi_{i} \) (\(i=1,2,3,4,5\)) are the adjoint variables.
By using the Pontryagin minimum principle and for the existence condition of the optimal control theory [24], we obtain the following theorem.
Theorem 4.1
If the objective cost function \(J(u_{1},u_{2})\) over U attains its minimum for the optimal control \(u^{*}=(u_{1}^{*},u_{2}^{*})\) corresponding to the endemic equilibrium \((S_{-}^{*}, S^{*}_{+}, I^{*}_{-}, I^{*}_{+}, M^{*})\), then there exist adjoint functions \(\xi_{1}\), \(\xi_{2}\), \(\xi_{3}\), \(\xi_{4}\), \(\xi_{5}\) satisfying the equations
along with the transversality condition \(\xi_{i}(t_{f})=0\) (\(i=1,\ldots,5\)).
Proof
According to the Pontryagin minimum principle, the unconstrained optimal control variables \(u_{1}^{*}\) and \(u_{2}^{*}\) satisfy
Equation (14) can be rewritten as
We can obtain from (16)
We have also obtained \(u^{*}_{1}\) and \(u^{*}_{2}\) in the following form:
Since the standard control is bounded, we conclude for the control \(u_{1}\) that
Hence the compact form of \(u^{*}_{1}\) is
In a similar manner we can get the compact form of \(u^{*}_{2}\)
According to the Pontryagin minimum principle, it can be written as follows:
where \(x_{i}\equiv(S_{-}, S_{+}, I_{-}, I_{+}, M)\).
The necessary conditions satisfying the optimal control \(u^{*}(t)\) are
Using (24), we can get the adjoint system (15) corresponding to systems (12) and (13). The optimal system consists of the state system (12), satisfying the initial condition \(S_{-}(0)=S_{0-}\), \(S_{+}(0)=S_{0+}\), \(I_{-}(0)=I_{0-}\), \(I_{+}(0)=I_{0+}\), \(M(0)=M_{0}\), and the adjoint system (15), satisfying transversality condition \(\xi_{i}(t_{f})=0\) for \(i=1,2,3,4,5\). □
4.1 Uniqueness of the optimal control
To prove the uniqueness of the optimality system, we use a simple lemma for the small time interval.
Lemma 1
[25]
The function \(u^{*}(s)=\min(\max (s,a),b)\) is Lipschitz continuous in s, where \(a< b\) are some fixed positive constants.
Theorem 4.2
The solution of the optimal system is unique for sufficiently small \([t_{0},t_{f}]\).
Proof
Suppose that \((S_{-}, S_{+}, I_{-}, I_{+}, M, \xi_{1}, \xi_{2}, \xi_{3},\xi_{4}, \xi_{5})\) and \((\bar{S}_{-},\bar{S}_{+}, \bar{I}_{-},\bar{I}_{+},\bar{M},\bar{\xi}_{1},\bar{\xi}_{2},\bar{\xi}_{3}, \bar{\xi}_{4},\bar{\xi}_{5})\) are two solutions of systems (12) and (15) such that for \(\theta>0\), \(S_{-}=e^{\theta t}p_{1}\), \(S_{+}=e^{\theta t}p_{2}\), \(I_{-}=e^{\theta t}p_{3}\), \(I_{+}=e^{\theta t}p_{4}\), \(M=e^{\theta t}p_{5}\), \(\xi_{1}=e^{-\theta t}q_{1}\), \(\xi_{2}=e^{-\theta t}q_{2}\), \(\xi_{3}=e^{-\theta t}q_{3}\), \(\xi_{4}=e^{-\theta t}q_{4}\), \(\xi_{5}=e^{-\theta t}q_{5}\) and \(\bar{S}_{-}=e^{\theta t}\bar{p}_{1}\), \(\bar{S}_{+}=e^{\theta t}\bar{p}_{2}\), \(\bar{I}_{-}=e^{\theta t}\bar{p}_{3}\), \(\bar{I}_{+}=e^{\theta t}\bar{p}_{4}\), \(\bar{M}=e^{\theta t}\bar{p}_{5}\), \(\bar{\xi}_{1}=e^{-\theta t}\bar{q}_{1}\), \(\bar{\xi}_{2}=e^{-\theta t}\bar{q}_{2}\), \(\bar{\xi}_{3}=e^{-\theta t}\bar{q}_{3}\), \(\bar{\xi}_{4}=e^{-\theta t}\bar{q}_{4}\), \(\bar{\xi}_{5}=e^{-\theta t}\bar{q}_{5}\).
Again, let
and
Substituting the values of \(S_{-}\), \(S_{+}\), \(I_{-}\), \(I_{+}\), M, \(\xi_{1}\), \(\xi_{2}\), \(\xi_{3}\), \(\xi_{4}\), \(\xi_{5}\), \(u^{*}_{1}\) and \(u^{*}_{2}\) in equations (12) and (15), we get
The equations for \(S_{-}\) and \(\bar{S}_{-}\), \(S_{+}\) and \(\bar{S}_{+}\), \(I_{-}\) and \(\bar{I}_{-}\), \(I_{+}\) and \(\bar{I}_{+}\) and lastly M and \(\bar{M}\) are subtracted. Each equation is multiplied by an appropriate function and then integrated from \(t_{0}\) to \(t_{f}\).
By using the above results, we get ten integral equations as follows:
From the above expressions, all these ten integrals are added and estimated to obtain the result. After combination, we get
Here \(\tilde{K}\) and \(\tilde{K_{1}}\) depend on the model parameters and constant terms.
We choose θ such that \(\theta>\tilde{K}+\tilde{K_{1}}\) and \(t_{f}<\frac{1}{3 \theta}\ln(\frac{\theta-\tilde{K}}{\tilde{K_{1}}})\), then
Thus, the system has a unique optimal solution for a small time interval. If the state equation has the initial condition and the adjoint equation has the final time condition, then the optimal controls \(u^{*}_{1}\) and \(u^{*}_{1}\) give a unique and optimal control strategy for the density of awareness programs driven by the media in the region under consideration. □
5 Numerical simulation
To study the dynamical behavior of model (2), we perform numerical computations with initial values \(S_{-}(0)=150\), \(S_{+}(0)=15\), \(I_{-}(0)=20\), \(I_{+}(0)=5\) and \(M(0)=8\). The set of parameter values is given in Table 1. These values are collected from different peer reviewed international journals, and the rest are hypothetical parameters relevant to HIV/AIDS. This set of parameter values is constant throughout the numerical experiments except the values of \(\lambda_{1}\) and \(\lambda_{2}\). Numerical simulations are done using MATLAB (version 7.6.0).
Trajectories for all populations and for cumulative awareness programs are drawn in Figure 1, which shows the changes in their behavior at any time t. From this figure, we can see that aware populations start increasing in nature from their initial values and other populations approach their equilibrium values. The non-linear stabilities of \((S_{-}^{*},I^{*}_{-})\) in \(S_{-}^{*}-I^{*}_{-}\) plane and \((S_{+}^{*},I^{*}_{+})\) in \(S_{+}^{*}-I^{*}_{+}\) plane are shown in Figure 2 and Figure 3, respectively. We can see that all trajectories initiating inside the region of attraction approach towards the equilibrium values \((S_{-}^{*},I^{*}_{-})\) and \((S_{+}^{*},I^{*}_{+})\). It is also worthy to mention that the rate of transfer from aware class to unaware class, i.e., \(\lambda_{1}\) and \(\lambda_{2}\), play an important role in the system. In Figure 4 and Figure 5, trajectories are drawn for different values of \(\lambda_{1}\) and \(\lambda_{2}\) (\(\lambda_{1}=0.003,0.005\) and \(\lambda _{2}=0.01,0.05\)), respectively, and it is found that value changes in \(\lambda_{1}\) and \(\lambda_{2}\) alter different population behavioral changes. Despite constant awareness being transferred to masses via media campaign, some fractions of the aware populations neglect the risks associated with the unaware susceptible and the infective, but try to be bold by their own beliefs and eventually cater to the infective class through awareness failures. This fraction is always a threat to the success rate of any mass awareness program and the disease persists as endemic. To test the effectiveness of the media awareness potential, we run our simulation experimentation considering a real life scenario, where we deliberately consider the infection rate at a higher prevalence (\(0.002<\beta<0.007\)) and compare increased ‘media awareness campaign’ to become aware of the potential risks and hazards of STD (sexually transmitted disease) like HIV and its countermeasures. Our simulation study reveals that increasing the awareness campaign during high infection period has the potential to delay the onset of infection among aware people for longer period compared to unaware class of population (Figure 6). It is also to be noted that the population which has already been infected may show some revival prospect due to the acquired informational wealth, but the response is very slow as they loose self-confidence to recover completely once they become infected.

Variations of populations with time.

Non-linear stability of \(\pmb{(S_{-}^{*},I^{*}_{-})}\) in \(\pmb{S_{-}^{*}-I^{*}_{-}}\) plane.

Non-linear stability of \(\pmb{(S_{+}^{*},I^{*}_{+})}\) in \(\pmb{S_{+}^{*}-I^{*}_{+}}\) plane.

Variation of infected population and other populations with different values of \(\pmb{\lambda_{1}}\) .

Variation of infected population and other populations with different values of \(\pmb{\lambda_{2}}\) .

Awareness performance for different values of media campaign, \(\pmb{M_{0}}\) under high infection scenario ( \(\pmb{0.002 < \beta < 0.007}\) ).
Numerical illustrations for optimal control induced problems (12) and (13) are done, and we perform optimality test of the system by making the changes of the variable \(\tau= t/t_{f}\) and transferring the interval \([0, 1]\). Here τ represents the step size, used for better strategy with a line search method, which will maximize the reduction of performance measure. We choose \(t_{f} = 1 + \Delta t_{f}\) and initially \(t_{f} = 1\). We also assume that \(\Delta t_{f} = 0.1\) and our desired value of \(t_{f} = 100\). The solution of the optimal system (12) and ‘control measures’ for different populations are displayed in Figure 7. In this figure, we can see that the control pair, \((u_{1}, u_{2})\) has a meaningful bearing on the system. Note that after inducing control approach, unaware susceptible and infected population sizes are decreasing, while the sizes of aware susceptible and infected populations are increasing as per our expectation. In Figure 8, control performances of media coverage \(u_{1}\) and \(u_{2}\) indicate that the frequency of awareness programs should be increasing with the change of time. Moreover, execution of more awareness campaigns and faster dissemination of awareness mobilize a large fraction of the population. This in turn will widen the aware population and hence slow down the prevalence of the disease HIV.

The system behavior for optimal control when final time is \(\pmb{t_{f}=1}\) (keeping all other parameters same as before considered).

Optimal control parameters \(\pmb{u_{1}^{*}}\) and \(\pmb{u_{2}^{*}}\) are plotted as the functions of time, keeping all other parameters same.
6 Discussion and conclusion
In this research article, we deal with a non-linear SI mathematical model reflecting the effect of awareness programs on a certain population with constant recruitment rate. We have studied the impact of awareness as a novel intervention for the control of epidemiological diseases. In the modeling process, it is assumed that media campaigns create awareness regarding personal protection as well as control AIDS. As a result, behavioral changes (transfer from unaware to aware) occur within the human population, which results in the formation of a new class, i.e., aware class. Individuals of this class not only protect themselves from the infection, but being aware they also take part in reducing AIDS by taking precautions. Our analytical study shows that the basic reproduction number \(R_{0}\), which determines the existence of the disease, does not contain any awareness related terms. As a result, the persistence of the disease does not depend on awareness programs. However, the awareness programs reduce the infection rate, shorten the rate of disease transmission and cut down the size of the disease. Numerical simulations, which are very realistic, add an extra dimension to our analytic conclusions. On the basis of the existence conditions and analytical results, we showed that the system has a unique optimal control pair \((u^{*}_{1},u_{2}^{*})\) for which the cost function will be minimum and outcomes will be time worthy. This implies that the presence of awareness in the population makes the disease expedition difficult and shorter. But in practical sense, disease remains endemic, because factors like low education, ignorance in taking precautions, social problems, immigration etc. play negative roles in the system. We discuss a simple model that captures some important features, and we believe these findings may help in controlling AIDS through awareness.
References
http://www.worldbank.org/en/news/feature/2012/07/10/hiv-aids-india
Del Valle, S, Evangelista, AM, Velasco, MC, Kribs-Zaleta, CM, Schmitz, SH: Effects of education, vaccination and treatment on HIV transmission in homosexuals with genetic heterogeneity. Math. Biosci. 187, 111-133 (2004)
Gumel, AB, Moghadas, SM, Mickens, RE: Effect of a preventive vaccine on the dynamics of HIV transmission. Commun. Nonlinear Sci. Numer. Simul. 9, 649-659 (2004)
Baryarama, F, Luboobi, LS, Mugisha, JYT: Periodicity of the HIV/AIDS epidemic in a mathematical model that incorporates complacency. Am. J. Infect. Dis. 1(1), 55-60 (2005)
Hove-Musekwaa, SD, Nyabadza, F: The dynamics of an HIV/AIDS model with screened disease carriers. Comput. Math. Methods Med. 10(4), 287-305 (2009)
Roy, PK, Chatterjee, AN, Greenhalgh, D, Khan, QJA: Long term dynamics in a mathematical model of HIV-1 infection with delay in different variants of the basic drug therapy model. Nonlinear Anal., Real World Appl. 14, 1621-1633 (2013)
Roy, PK, Chatterjee, AN: Effect of HAART on CTL mediated immune cells: an optimal control theoretic approach. In: Electrical Engineering and Applied Computing, vol. 90, pp. 595-607. Springer, Berlin (2011)
Roy, PK, Chatterjee, AN: Anti-viral drug treatment along with immune activator IL-2: a control-based mathematical approach for HIV infection. Int. J. Control 85(2), 220-237 (2012)
Roy, PK, Chowdhury, S, Chatterjee, AN, Chottopadhyay, J, Norman, R: A mathematical model on CTL mediated control of HIV infection in a long term drug therapy. J. Biol. Syst. 21(3), 1350019 (2013)
Wodarz, D, Nowak, MA: Specific therapy regimes could lead to long-term immunological control to HIV. Proc. Natl. Acad. Sci. USA 96(25), 14464-14469 (1999)
Wodarz, D, May, RM, Nowak, MA: The role of antigen-independent persistence of memory cytotoxic T lymphocytes. Int. Immunol. 12, 467-477 (2000)
Kim, WH, Chung, HB, Chung, CC: Optimal switching in structured treatment interruption for HIV therapy. Asian J. Control 8(3), 290-296 (2006)
Liu, R, Wu, J, Zhu, H: Media/psychological impact on multiple outbreaks of emerging infectious diseases. Comput. Math. Methods Med. 8(3), 153-164 (2007)
Misra, AK, Sharma, A, Singh, V: Effect of awareness programs in controlling the prevalence of an epidemic with time delay. J. Biol. Syst. 19, 389-402 (2011)
Samanta, S, Rana, S, Sharma, A, Misra, AK, Chaattopadhyay, J: Effect of awareness programs by media on the epidemic outbreaks: a mathematical model. Appl. Math. Comput. 219, 6965-6977 (2013)
Van Segbroeck, S, Santos, FC, Pacheco, JM: Adaptive contact networks change effective disease infectiousness and dynamics. PLoS Comput. Biol. 6(8), e10008 (2010)
Samanta, S, Chattopadhaya, J: Effect of awareness program in disease outbreak - a slow-fast dynamics. Appl. Math. Comput. 237, 98-109 (2014)
Heffernan, JM, Smith, RJ, Wahl, LM: Perspectives on the basic reproductive ratio. J. R. Soc. Interface 2(4), 281-293 (2005)
Van den Driessche, P, Watmough, J: Reproduction numbers and sub threshold endemic equilibria for compartmental models of disease transmission. Math. Biosci. 180, 29-48 (2000)
Pontryagin, LS, Boltyanskii, VG, Gamkrelidze, RV, Mishchenko, EF: Mathematical Theory of Optimal Processes, vol. 4. Gordon & Breach, New York (1986)
Kamien, M, Schwartz, NL: Dynamic Optimisation, 2nd edn. North-Holland, New York (1991)
Swan, GM: Application of Optimal Control Theory in Biomedicine. Dekker, New York (1984)
Fleming, W, Rishel, R: Deterministic and Stochastic Optimal Controls. Springer, New York (1975)
Joshi, HR: Optimal control of an HIV immunology model. Optim. Control Appl. Methods 23, 199-213 (2002)
Acknowledgements
The authors would like to thank the referees for their constructive and insightful comments, which helped us to improve the quality of this work. This work is supported by the Department of Science and Technology, Government of India.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally to the writing of this paper. All authors read and approved the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Roy, P.K., Saha, S. & Basir, F.A. Effect of awareness programs in controlling the disease HIV/AIDS: an optimal control theoretic approach. Adv Differ Equ 2015, 217 (2015). https://doi.org/10.1186/s13662-015-0549-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-015-0549-9