
Abstract
In this paper, an analytical solution for the effect of the rotation in a magneto-thermo-viscoelastic non-homogeneous medium with a spherical cavity subjected to periodic loading is presented. The distribution of displacements, temperature, and stresses in the non-homogeneous medium in the context of generalized thermo-elasticity using GL (Green-Lindsay) theory is discussed and obtained in analytical form. The results are displayed graphically to illustrate the effect of rotation, relaxation, magnetic field, viscoelasticity, and non-homogeneity. Comparisons are made with the previous work in the absence of rotation and initial stress.
Similar content being viewed by others

1 Introduction
In recent years, the theory of magneto-thermo-viscoelasticity, which deals the interactions among strain, temperature, and electromagnetic fields has drawn the attention of many researchers because of its extensive use in diverse fields, such as geophysics for understanding the effect of the Earth’s magnetic field on seismic waves, damping of acoustic waves in a magnetic field, emission of electromagnetic radiations from nuclear devices, development of a highly sensitive superconducting magnetometer, electrical power engineering, optics, etc.; see [1]–[4]. Mahmoud et al. [5], [6] investigated the effect of the rotation on plane vibrations in a transversely isotropic infinite hollow cylinder, the effect of the rotation on wave motion through a cylindrical bore in a micropolar porous cubic crystal and he investigated the effect of a magnetic field and non-homogeneity on the radial vibrations in a hollow rotating elastic cylinder. Abd-Alla et al. [7]–[10] investigated the effect of the rotation on a non-homogeneous infinite cylinder of orthotropic material, influence of rotation, radial vibrations in a non-homogeneous orthotropic elastic hollow sphere subjected to rotation, and they investigated the magneto-thermo-elastic problem in a rotating non-homogeneous orthotropic hollow cylinder in the hyperbolic heat conduction model. Mahmoud [11], [12] investigated the analytical solution for an electrostatic potential on wave propagation modeling in human long wet bones, and they studied the influence of rotation and generalized magneto-thermo-elastics on Rayleigh waves in a granular medium under the effect of initial stress and a gravity field. Abd-Alla and Mahmoud [13] investigated the analytical solution of wave propagation in non-homogeneous orthotropic rotating elastic media. Abd-Alla et al. [14]–[16] investigated some problems like the propagation of an S-wave in a non-homogeneous anisotropic incompressible and initially stressed medium under the influence of a gravity field, the generalized magneto-thermo-elastic Rayleigh waves in a granular medium under the influence of a gravity field and initial stress, and they also investigated the problem of transient coupled thermo-elasticity of an annular fin. Some problems of thermo-elasticity and wave propagation modeling in a cylinder are investigated by Abd-Alla et al. [17], [18], respectively. Mukhopadhyay [19] investigated the effects of thermal relaxations on thermo-viscoelastic interactions in an unbounded body with a spherical cavity subjected to a periodic loading on the boundary. The effects of thermal relaxations on thermo-elastic interactions in an unbounded body with a spherical cavity or cylindrical hole subjected to a periodic loading on the boundary, respectively, were investigated by Roychoudhuri and Mukhopadhyay [20]. The thermally induced vibrations in a generalized thermo-elastic solid with a cavity have been investigated by Erbay et al. [21] and Li and Qi [22]. Mahmoud [23] investigated the analytical solution for free vibrations of an elasto-dynamic orthotropic hollow sphere under the influence of rotation.
In this paper, rotation and the magneto-thermo-elastic equation of a spherical cavity are decomposed into a non-homogeneous equation with boundary conditions. The effect of thermal relaxation times on the wave propagation in the magneto-thermo-viscoelastic case using the GL theory will be discussed. We take the material of the spherical cavity to be of Kelvin-Voigt type. Thus, the exact expressions for the transient response of displacement, stresses, and temperature in a spherical cavity are obtained. The numerical calculations will be investigated for the displacement, temperature, and the components of stresses, and we explain the special case from this study when the magnetic field and non-homogeneity are neglected. Finally, numerical results are calculated and discussed.
2 Formulation of the problem
We shall consider the spherical coordinates of any representing point to be and assume that the spherical cavity is subjected to a rapid change in temperature and magnetic field , for the axisymmetric plane strain problem, and the components of the displacement are expressed as , and . Let us consider an infinite isotropic non-homogeneous viscoelastic solid, and the viscoelastic nature of the material is described by the Voigt type of linear viscoelasticity. The medium is assumed to have a spherical cavity of radius . For a spherical symmetric system, the non-vanishing stress components are expressed as
where , , and are the normal mechanical stresses, , , are shear mechanical stresses. and are the mechanical relaxation times due to the viscosity. The magneto-elasto-dynamic equation of the non-homogeneity in the spherical case if , becomes
where , is the centripetal acceleration due to the time varying motion only and is the Coriolis acceleration, we have the Lorentz force [18], which may be written as
where is the perturbed magnetic field over the primary magnetic field, is the electric intensity, is the electric current density, is the magnetic permeability, is the constant primary magnetic field, and is the displacement vector.
The magneto-thermo-elasto-dynamic equations of the non-homogeneity sphere may be written as
where is the thermal conductivity, , is the rotation, is the density of the material, is the specific heat of the material per unit mass, , are thermal relaxation parameters, is the coefficient of linear thermal expansion, , are Lame elastic constants, is the absolute temperature, is a reference temperature of solid, is temperature difference , and is the mechanical relaxation time due to the viscosity. In the above formula, the non-homogeneity of the material is characterized by a special law as follows:
where , , and are the Lame’s constant, shear modulus, mass density, pressure, and magnetic permeability coefficient of the homogeneous material, respectively, and expresses a non-homogeneous exponent of the material, which is an arbitrary real number. Substituting (5) into (1) yields
where is the Maxwell stress tensor. From plugging (5) and (6) into (2) we have
Let , , , .
Then the elasto-dynamic equation (7) becomes
In addition, the heat conduction equation is
We now use the following dimensionless quantities:
In the following discussion the primes are neglected for .
The normal stresses relations can be set right in non-dimensional form as:
where , .
Substituting of (11) into (8) and (9) gives the displacement equation in the non-dimensional form of the non-homogeneous spherical as follows:
The heat conduction equation in non-dimensional form is
where , .
3 The problem solution
We seek the general solution to the basic equation (12) of magneto-thermo-elastic motion as a harmonic vibration in the form
From (14) the equation of motion becomes
where , or in the form
where
Also the heat conduction equation becomes
where , , .
To solve (16) and (17), we let
By comparing the coefficients of in (19), we get
The heat conduction equation becomes
where , .
Decoupling (20) and (21), we obtain
where , and are the roots with positive real parts of the biquadratic equation:
Assuming the regularity conditions for and the solutions of (23) are obtained in terms of the spherical Hankel function, (23) representing an ordinary differential equation with variable coefficients of order four; from this equation we can determine the components of the displacement and the temperature , and finally determine the components of the stress. We have
where and are arbitrary constants and is the Hankel function of order zero and of the second kind. From (14), (18), (16), and (25a)-(25b), the solution for the displacement, temperature and the radial and hoop stresses are found to have the forms
4 Boundary conditions
Let us consider the corresponding boundary conditions,
where is a constant; we get
This is the solution of the current problem for the case of a non-homogeneous isotropic viscoelastic unbounded body with spherical cavity without the effect of a magnetic field; it coincides with one previously published.
5 Discussion and numerical results
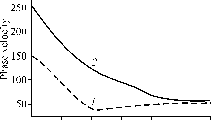
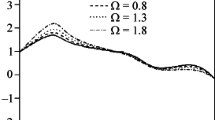
The results presented in this paper should prove useful for researchers in material science, designers of new materials, low-temperature physicists as well as for those working on the development of magneto-thermo-viscoelastic theory. The copper material was used chosen for purposes of numerical evaluations. The constants of the problem are given [24]. The numerical technique outlined above was used to obtain the temperature, radial displacement, radial stress and hoop stress inside the sphere. These distributions are shown in Figures 1-4, respectively. Important phenomena are observed in all computations: It was found that for large values of time the coupled and the generalized give close results. The case is quite different when we consider a small value of time. The coupled theory predicts infinite speeds of wave propagation. This is evident from the fact that the obtained solutions are not identically zero for any values of time but fade gradually to very small values at points for removed from the surface. The solutions obtained in the context of GL theory, however, exhibit the behavior of finite speeds of wave propagation. The computations were carried out for a thermal relaxation time of , a magnetic field of , a mechanical relaxation time of , and a frequency of . For the sake of brevity some computational results are not presented here. Figures 1-4 show the solution corresponding to the use of the non-homogeneous material (). Figure 1 shows the temperature distribution and the solution corresponding to the effect of rotation. Figure 2 shows the radial displacement in a generalized thermo-elastic non-homogeneous medium subjected to rotation, thermal relaxation, and a magnetic field. The figures indicate that the medium along the radius undergoes expansion deformation because of these effects. The radial displacement increases with increasing rotation and it increases with increasing radius . Figure 3 shows the radial stress in a generalized thermo-elastic non-homogeneous medium subjected to rotation, thermal relaxation, and a magnetic field; in Figure 3 the radial stress decreases with increasing rotation when we have a small value of the radius of less than 2. Also, Figure 3 represents the solution corresponding to the use of the effect of the magnetic field . Figure 4 shows the hoop stress in a generalized thermo-elastic non-homogeneous medium subjected to rotation, thermal relaxation, and a magnetic field. From this figure, the hoop stress decreases with increasing radius ; Figure 4 represents the solution corresponding to the use of the effect of rotation; also Figure 4 represents the hoop stress corresponding to the use of the effect of the magnetic field . It was found that near the surface cavity where the boundary conditions dominate the coupled and the generalized theories give very close results. Inside the sphere, the solution is markedly different. This is due to the fact that thermal waves in the coupled theory the traveled distance is not identically zero (though it may be very small) for any small of time. By comparing with results in [24] it was found that has the same behavior in both media. But the values of in a generalized thermo-elastic medium are larger in comparison with those in a thermo-elastic medium. The same remark can be made for by comparing the figures. This is due to the influence of relaxation time, magnetic field, and frequency. Extensive literature on the topic is now available and we can only mention a few recent interesting investigations in [25]–[34].

Variation of temperature versus the radius at various values of rotation when , , , , .

Variation of radial displacement versus the radius at various values of rotation when , , , , .

Variation of radial stress versus the radius at various values of rotation when , , , , .

Variation of hoop stress versus the radius at various values of rotation when , , , , .
6 Conclusions
The elasto-dynamic equations for the generalized thermo-viscoelastic theory under the effect of the non-homogeneous material, rotation, relaxation, and magnetic field have a complicated nature. The method used in this study provides a quite successful approach in dealing with such problems. The displacement, temperature, and stress components have been obtained in analytical form. This approach gives an exact solution in the Hankel transform domain that appears in the governing equations of the problem considered. Numerical results are calculated and discussed and illustrated graphically.
References
Yang GC, Xu YZ, Dang LF: On the shear stress function and the critical value of the Blasius problem. J. Inequal. Appl. 2012., 2012: 10.1186/1029-242X-2012-208
Ma Z: Exponential stability and global attractors for a thermoelastic Bresse system. Adv. Differ. Equ. 2010., 2010: 10.1186/1687-1847-2010-748789
Marin M, Agarwal RP, Mahmoud SR: Modeling a microstretch thermoelastic body with two temperatures. Abstr. Appl. Anal. 2013., 2013: 10.1155/2013/583464
Emamizadeh B: Applications of a weighted symmetrization inequality to elastic membranes and plates. J. Inequal. Appl. 2010., 2010: 10.1155/2010/808693
Mahmoud SR, Abd-Alla AM, Al-Shehri NA: Effect of the rotation on plane vibrations in a transversely isotropic infinite hollow cylinder. Int. J. Mod. Phys. B 2011, 25(26):3513-3528. 10.1142/S0217979211100928
Mahmoud SR, Abd-Alla AM, Matooka BR: Effect of the rotation on wave motion through cylindrical bore in a micropolar porous cubic crystal. Int. J. Mod. Phys. B 2011, 25: 2713-2728. 10.1142/S0217979211101739
Abd-Alla AM, Yahya GA, Mahmoud SR: Effect of magnetic field and non-homogeneity on the radial vibrations in hollow rotating elastic cylinder. Meccanica 2013, 48(3):555-566. 10.1007/s11012-012-9615-5
Abd-Alla AM, Mahmoud SR, Al-Shehri NA: Effect of the rotation on a non-homogeneous infinite cylinder of orthotropic material. Appl. Math. Comput. 2011, 217: 8914-8922. 10.1016/j.amc.2011.03.077
Abd-Alla AM, Yahya GA, Mahmoud SR: Radial vibrations in a non-homogeneous orthotropic elastic hollow sphere subjected to rotation. J. Comput. Theor. Nanosci. 2013, 10(2):455-463. 10.1166/jctn.2013.2718
Abd-Alla AM, Mahmoud SR: Magneto-thermoelastic problem in rotating non-homogeneous orthotropic hollow cylinder under the hyperbolic heat conduction model. Meccanica 2010, 45: 451-462. 10.1007/s11012-009-9261-8
Mahmoud SR: Analytical solution for electrostatic potential on wave propagation modeling in human long wet bones. J. Comput. Theor. Nanosci. 2014, 11(2):454-463. 10.1166/jctn.2014.3379
Mahmoud SR: Influence of rotation and generalized magneto-thermoelastic on Rayleigh waves in a granular medium under effect of initial stress and gravity field. Meccanica 2012, 47(7):1561-1579. 10.1007/s11012-011-9535-9
Abd-Alla AM, Mahmoud SR: Analytical solution of wave propagation in non-homogeneous orthotropic rotating elastic media. J. Mech. Sci. Technol. 2012, 26(3):917-926. 10.1007/s12206-011-1241-y
Abd-Alla AM, Mahmoud SR, Abo-Dahab SM, Helmi MIR: Propagation of S-wave in a non-homogeneous anisotropic incompressible and initially stressed medium under influence of gravity field. Appl. Math. Comput. 2011, 217(9):4321-4332. 10.1016/j.amc.2010.10.029
Abd-Alla AM, Abo-Dahab SM, Mahmoud SR, Hammad HA: On generalized magneto-thermoelastic Rayleigh waves in a granular medium under influence of gravity field and initial stress. J. Vib. Control 2011, 17: 115-128. 10.1177/1077546309341145
Abd-Alla AM, Mahmoud SR, Abo-Dahab SM: On problem of transient coupled thermoelasticity of an annular fin. Meccanica 2012, 47(5):1295-1306. 10.1007/s11012-011-9513-2
Abd-Alla AM, Mahmoud SR, Abo-Dahab SM: Wave propagation modeling in cylindrical human long wet bones with cavity. Meccanica 2011, 46(6):1413-1428. 10.1007/s11012-010-9398-5
Abd-Alla AM, Mahmoud SR: On problem of radial vibrations in non-homogeneity isotropic cylinder under influence of initial stress and magnetic field. J. Vib. Control 2013, 19(9):1283-1293. 10.1177/1077546312441043
Mukhopadhyay S: Effects of thermal relaxations on thermo-visco-elastic interactions in an unbounded body with a spherical cavity subjected to a periodic loading on the boundary. J. Therm. Stresses 2000, 23: 675-684. 10.1080/01495730050130057
Roychoudhuri SK, Mukhopadhyay S: Effect of rotation and relaxation times on plane waves in generalized thermo-viscoelasticity. Int. J. Math. Math. Sci. 2000, 23(7):497-505. 10.1155/S0161171200001356
Erbay HA, Erbay S, Dost S: Thermally induced vibrations in a generalized thermoelastic solid with a cavity. J. Therm. Stresses 1991, 14: 161-171. 10.1080/01495739108927059
Li J, Qi J: Spectral problems for fractional differential equations from nonlocal continuum mechanics. Adv. Differ. Equ. 2014., 2014: 10.1186/1687-1847-2014-85
Mahmoud SR: Analytical solution for free vibrations of elastodynamic orthotropic hollow sphere under the influence of rotation. J. Comput. Theor. Nanosci. 2014, 11: 137-146. 10.1166/jctn.2014.3328
Roychoudhuri SK, Banerjee S: Magneto-thermoelastic interactions in an infinite viscoelastic cylinder of temperature rate dependent material subjected to a periodic loading. Int. J. Eng. Sci. 1998, 36(5/6):635-643. 10.1016/S0020-7225(97)00096-7
Abd-Alla AM, Abo-Dahab SM, Mahmoud SR, Al-Thamalia TA: Influence of the rotation and gravity field on Stonely waves in a non-homogeneous orthotropic elastic medium. J. Comput. Theor. Nanosci. 2013, 10(2):297-305. 10.1166/jctn.2013.2695
Mahmoud SR: On problem of shear waves in a magneto-elastic half-space of initially stressed a non-homogeneous anisotropic material under influence of rotation. Int. J. Mech. Sci. 2013.
Marin M: The Lagrange identity method in thermoelasticity of bodies with microstructure. Int. J. Eng. Sci. 1994, 32(8):1229-1240. 10.1016/0020-7225(94)90034-5
Mahmoud SR: Effect of non-homogeneity and rotation on an infinite generalized thermoelastic diffusion medium with a spherical cavity subject to magnetic field and initial stress. Abstr. Appl. Anal. 2013., 2013: 10.1155/2013/284646
Marin M: A partition of energy in thermoelasticity of microstretch bodies. Nonlinear Anal., Real World Appl. 2010, 11(4):2436-2447. 10.1016/j.nonrwa.2009.07.014
Bessaim A, Houari MSA, Tounsi A, Mahmoud SR, Adda Bedia EA: A new higher-order shear and normal deformation theory for the static and free vibration analysis of sandwich plates with functionally graded isotropic face sheets. J. Sandw. Struct. Mater. 2013.
Mahmoud SR, Marin M, Ali SI, Al-Basyouni KS: On free vibrations of elastodynamic problem in rotating non-homogeneous orthotropic hollow sphere. Math. Probl. Eng. 2013., 2013: 10.1155/2013/250567
Marin M, Marinescu C: Thermoelasticity of initially stressed bodies, asymptotic equipartition of energies. Int. J. Eng. Sci. 1998, 36(1):73-86. 10.1016/S0020-7225(97)00019-0
Ezzat MA, Atef HM: Magneto-thermo-viscoelastic material with a spherical cavity. J. Civ. Eng. Constr. Technol. 2011, 2(1):6-16.
Marin M, Agarwal RP, Mahmoud SR: Nonsimple material problems addressed by the Lagrange’s identity. Bound. Value Probl. 2013., 2013: 10.1186/1687-2770-2013-135
Acknowledgements
This article (project) was funded by the Deanship of Scientific Research (DSR), King Abdulaziz University, Jeddah, under grant No. (130-094-D1434). The authors, therefore, acknowledge with thanks DSR technical and financial support.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors, KSA, SRM and EOA contributed to each part of this work equally and read and approved the final version of the manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0), which permits use, duplication, adaptation, distribution, and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Cite this article
Al-Basyouni, K.S., Mahmoud, S.R. & Alzahrani, E.O. Effect of rotation, magnetic field and a periodic loading on radial vibrations thermo-viscoelastic non-homogeneous media. Bound Value Probl 2014, 166 (2014). https://doi.org/10.1186/s13661-014-0166-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13661-014-0166-7