
Abstract
In this paper, numerical solution of nonlinear Hammerstein integral equations via collocation method based on double exponential transformation is considered. Some remarks with respect to the computational cost and stability and implementation are discussed. Examples are presented to illustrate effectiveness of method.
Similar content being viewed by others


Introduction
In this paper, we consider the nonlinear Hammerstein integral equations of this form:
where a,b, and λ are real constants; g(x),K(x,t), and F(t,u(t)) are given functions; and u(x) is to be determined. Equation 1 is applied in various areas of electromagnetic, fluid dynamics, reformulation of two-point boundary value problems [1]. Many different methods are usually used to solve Equation 1 such as the polynomial approximation [2], radial basis function [3], Adomian decomposition method [4], Chebyshev and Taylor collocation [5], and wavelets [6].
The Sinc method is a powerful numerical tool for finding fast and accurate solutions in various areas of problems. In [7, 8], a full overview of the Sinc function and appropriate conditions and theorems have been discussed. In [9], the Sinc collocation method for numerical solutions of Hammerstein integral equations was used. Double exponential transformation, abbreviated as DE was first proposed by Takahasi and Mori [10] in 1974 for one-dimensional numerical integration, and it has come to be widely used in applications. It is known that the double exponential transformation gives an optimal result for the numerical evaluation of definite integrals of an analytic function [11–13]. Indeed it has been demonstrated that the use of the Sinc method in cooperation with the DE transformation gives highly efficient numerical methods for approximation of function, indefinite numerical integration, and solution of differential equations [14]. However, Sugihara [15–17] has recently found that the errors in the Sinc numerical methods are O(exp(−c N/l o g N)) with some c>0, which is also practically meaningful.
The main purpose of the present research is to consider the numerical solution of Hammerstein integral equations based on double exponential transformation and investigate computational cost and stability and implementation of the algorithm. Also, some remarkable properties of this method are explained.
The layout of the paper is as follows: in the “Methods” section, we give basic definitions, assumptions and preliminaries of the Sinc approximations and main idea of the work. In the “Results and discussion” section, the proposed algorithm is applied to solve some nonlinear Hammerstien integral equations and the details of the numerical implementation and some experimental results are mentioned; finally, the “Conclusion” section, contains the conclusion remarks.
Algorithm 1

Methods
Basic definitions and preliminaries
Let f be a function defined on , h>0 as the step size, and then the Whittaker cardinal defined by the series
whenever this series is convergent, and
where S(j,h)(x) is known as j−t h Sinc function evaluated at x. Throughout this paper, let d>0 and D d denote the region {z=x+i y |y|<d} in the complex plan and ϕ the conformal map of a simply connected domain D in the complex domain onto D d , such that ϕ(a)=−∞,ϕ(b)=∞, where a,b are boundary points of D with a,b∈∂ D. Let ψ denote the inverse map of ϕ, and let the arc Γ, with end points a,b (a,b∈Γ), given by Γ=ψ(−∞,∞). For h>0, let the points x k on Γ given by x k =ψ(k h), k∈Z.
Moreover, let us consider H1(D d ) be the family of all functions g analytic in D d , such that
We recall the following definition from [10, 16], which will become instrumental in establishing our useful formulas:
Definition 1
A function g is said to decay double exponentially if there exist constants α and C, such that
Equivalently, a function g is said to decay double exponentially with respect to conformal map ϕ if there exist positive constants α and C such that
Here, we suppose that denote the family of functions g, where g(ϕ(t))ϕ′(t) belongs to H1(D d ) and decays double exponentially with respect to ϕ. If f belongs to with respect to ϕ, then we have the following formulas for definite and indefinite integrals based on DE transformation which is given and fully discussed in [18]:
and
where
Also, S i(t) is the Sine integral defined by:
and the mesh size h satisfies .
Main idea
To apply DE transformation for approximation of Equation 1, first, we use indefinite integration for the second term of its right-hand side:
Similarly, for definite integral we have:
where F j =F(t j ,u(t j )),j=−N...N. If we substitute Equation 7 in right-hand side of Equation 1,
To find unknown F j =F(t j ,u(t j ),j=−N...N, we can apply the Sinc collocation points x k as x k =ϕ(k h),k=−N...N, so we have the following nonlinear system of (2N+1)(2N+1) unknown F j :
By solving a system of nonlinear equations, we obtain approximate solution u j which corresponds to the exact solution u(x j ) at the Sinc points x k =ϕ(k h). To obtain an approximation in arbitrary x, we use a method similar to the Nyström method [19] for the Volterra integro differential equation:
By using the notations
the system in Equation 9 can be shown in matrix form:
Finally, we give Algorithm 1 to compute numerical solution of Equation 1.
Results and discussion
Numerical experiments
In this section, three examples are presented based on Algorithm 1 to illustrate the effectiveness and importance of proposed method. All programs have been provided by Maple 13. Also, in order to show the error and the accuracy of approximation, we apply the following criteria: 1) Absolute error between the exact and approximate solution (L ∞ error norm) is defined for M=2N+1 by
-
2)
The L 2 error norm is defined by
(13) -
3)
The root mean square (RMS) is defined by
(14)
where M=2N+1 is the number of test points (Sinc points). 4) Run time of program which is showed by T(s), (s means second).
Example 1
Consider the integral equation [3]:
with the exact solution: u(x)= cos(x). To obtain results, we take three sample numbers of basic functions, such as N=5,8,11. Also, in order to have better results, we concentrate on the mentioned criteria as runtime (column T(s) in Table 1), infinity norm (column ∥.∥ ∞ ), L2 error norm (column ∥.∥2), RMS error (column RMS), condition number (column Cond based on infinity norm). The results in Sinc collocation method are shown in Table 1.
As observed in Table 1, numerical results show simplicity and very good accuracy of the method. By decreasing the number of basic functions, the errors have been decreased. Also, in comparison with the results of [3], which used MQ Radial Basis function, condition number in each row is very small, which is a good factor in the Sinc method. For example, in the Sinc method for N=10, we have a 21×21 system of nonlinear equations, with condition number 7.19E+000, but in [3], condition number is 2.45E+013, which is very noticeable. Also, we must notice the size of system which in this case is 10×10. Run time of program in comparison with the size of nonlinear system in the Sinc method is remarkable. Figure 1 shows the exact and the approximate solution of this example.

The exact u(x) and the approximate u N (x) solution of Example 1 for N=5 .
Example 2
Consider the following integral equation [9]:
with the exact solution: u(x)= exp(x).
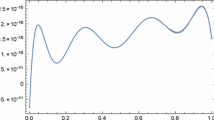
In this example, results show good approximation based on the Sinc collocation method. Clearly, these remarkable factors are mostly due to structure of coefficient matrix which is very important. Also, in [9], Sinc collocation with single transformation was applied and for N=35 maximum error. ∥.∥ ∞ =9.37E−10 was obtained which in comparison with double exponential transformation is very remarkable since in this manner, the size of nonlinear system is 71×71. Figure 2 shows convergence behavior of the Sinc collocation method in terms of infinity norm versus reciprocal of number of collocation points N. Similar to column ∥.∥ ∞ in Table 2, Figure 2 shows that infinity norm decreases by increasing the number of collocation points. Figure 3 shows the exact and approximate solution of this example.

The plot of error (with infinity norm) versus N in Example 2.

u(x) the exact and u N (x) the approximate solution of Example 2 with N=3 .
Example 3
Consider the following nonlinear Hammerstein integral equation [9]:
with the exact solution:
The results in Table 3, show the efficiency and rate of convergence of the method. By decreasing the number of basic functions, the errors have been decreased. Condition number in each row is small, that is a good factor in Sinc method. This property is caused by special structure of coefficient Matrix. In comparison with [9] by single exponential transformation and maximum error ∥.∥ ∞ =5.88E−9 with N=45, results in Table 3 are very considerable. Figure 4 shows convergence behavior of Sinc collocation method. Also, Figure 5 shows the exact and the approximate solution of this example.

The plot of error (with infinity norm) versus N in Example 3.

The exact u(x) and the approximate u N (x) solution of Example 3 with N=3 .
However, the results show that the proposed method is practically reliable. Also, Sinc collocation method gives better accuracy in very small run time with low computational cost. Based on results and other works [20, 21], the Sinc collocation method gives better accuracy at the computational cost; also, the implementing and coding are very easy.
Conclusion
We applied the Sinc collocation method based on double exponential transformation to nonlinear Hammerstein integral equations. The Sinc collocation method in run time and condition number have good reliability and efficiency. Also, we can improve the accuracy of the solution by selecting the appropriate shape parameters and selecting the large values of N. Results show the high accuracy of method by taking this view that storing in time and memory is another useful property in the Sinc method. In addition, this method is portable to other areas of problems and is easy to program.
References
Delves LM, Mohamed JL: Computational methods for integral equations. Cambridge: Cambridge university press; 1985.
Maleknejad K, Hashemizadeh E, Ezzati R: A new approach to the numerical solution of Volterra integral equations by using Bernstein approximation. Commun. Nonlinear Sci. Numer. Simulat 2011, 16: 647–55. 10.1016/j.cnsns.2010.05.006
Parand K, Rad JA: Numerical solution of nonlinear Voltera-Fredholm-Hammerstein integral equations via collocation method based on radial basis function. Appl. Math. Comput 2012, 218: 5292–5309. 10.1016/j.amc.2011.11.013
Madbouly NM, McGhee DF, Roach GF: Adomian’s method for Hammerstein integral equations arising from chemical reactor theory. Appl. Math. Comput 2001, 117: 241–249. 10.1016/S0096-3003(99)00177-0
Elnagar GN, Kazemi M: Chebyshev spectral solution of nonlinear Volterra Hammerstein integral equations. J. Comput. Appl. Math 1996, 76: 147–158. 10.1016/S0377-0427(96)00098-2
Yousefi S, Razzaghi M: Legendre Wavelets method for the nonlinear Volterra ŰFredholm integral equations. Math. Comput. Simul 2005, 70: 1–8. 10.1016/j.matcom.2005.02.035
Lund J, Bowers K: Sinc Methods for Quadrature and Differential Equations. Philadelphia: SIAM; 1992.
Stenger F: Numerical Methods, Based on Sinc and Analytic Functions. New York: Springer; 1993.
Rashidinia J, Zarebnia M: New approach for numerical solution of Hammerstein integral equations. Appl. Math. Comput 2007, 185: 147–154. 10.1016/j.amc.2006.07.017
Takahasi H, Mori M: Double exponetial formulas for numerical integration. Publ. Res. Inst. Math. Sci 1974, 9: 721–741.
Mori M, Sugihara M: The double exponential transformation in numerical analysis. J. Comput. Appl. Math 2001, 127: 287–296. 10.1016/S0377-0427(00)00501-X
Muhammad M, Mori M: Double exponential formulas for numerical indefinite integration. J. Comput. Appl. Math 2003, 161: 431–448. 10.1016/j.cam.2003.05.002
Muhammad M, Nurmuhammad A, Mori M, Sugihara M: Numerical solution of integral equations by means of the Sinc collocation based on the DE transformation. J. Comput. Appl. Math 2005, 177: 269–286. 10.1016/j.cam.2004.09.019
Nurmuhammad A, Muhammad M, Mori M: Double exponential transformation in the Sinc collocation method for a boundary value problem. J. Comput. Appl. Math. Applic 1999, 38: 1–8.
Sugihara M: Near optimality of the Sinc approximation. Math. Comp 2002, 71: 767–786.
Sugihara M: Optimality of the double exponential formula - functional analysis approach. Numer. Math 1997, 75: 379–395. 10.1007/s002110050244
Sugihara M, Matsuo T: Recent development of the Sinc numerical methods. J. Comput. Appl. Math 2004, 164: 673–689.
Haber S: Two formulas for numerical indefinite integration. Math. Comp 1993, 60: 279–296. 10.1090/S0025-5718-1993-1149292-9
Guoqiang H, Liqing Z: Asymptotic expansion for the trapezoidal Nystrom method of linear Volterra-Fredholm equations. J. Comput. Appl. Math 1994, 51: 339–348. 10.1016/0377-0427(92)00013-Y
Fariborzi Araghi M A, Kazemi Gelian Gh: Numerical solution of integro differential equations based on double exponential transformation in the sinc-collocation method. App. Math. Comp. Intel 2012, 1: 48–55.
Hadizadeh M, Kazemi Gelian Gh: Error estimate in the Sinc collocation method for Volterra-Fredholm integral equations based on DE transformations. ETNA 2008, 30: 75–87.
Acknowledgements
This work was supported by Islamic Azad University, Central Tehran, based on the Ph.D. thesis of the second author. Also, the authors would like to thank the reviewers for their careful reading and for making some useful comments which improved the presentation of the paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
Both authors have almost equal contributions to the article. Both authors read, checked, and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Fariborzi Araghi, M.A., Gelian, G.K. Numerical solution of nonlinear Hammerstein integral equations via Sinc collocation method based on double exponential transformation. Math Sci 7, 30 (2013). https://doi.org/10.1186/2251-7456-7-30
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/2251-7456-7-30