
Abstract
In this work, recently developed modified simple equation (MSE) method is applied to find exact traveling wave solutions of nonlinear evolution equations (NLEEs). To do so, we consider the (1 + 1)-dimensional nonlinear dispersive modified Benjamin-Bona-Mahony (DMBBM) equation and coupled Klein-Gordon (cKG) equations. Two classes of explicit exact solutions–hyperbolic and trigonometric solutions of the associated equations are characterized with some free parameters. Then these exact solutions correspond to solitary waves for particular values of the parameters.
PACS numbers
02.30.Jr; 02.70.Wz; 05.45.Yv; 94.05.Fg
Similar content being viewed by others

Introduction
The study of NLEEs, i.e., partial differential equations with time derivatives has a rich and long history, which has continued to attract attention in the last few decays. There are many examples throughout the world where NLEEs play an important role in controlling the natural systems. Because the majority of the phenomena in real world can be described by using NLEEs. NLEEs are frequently used to explain many problems of meteorology, population dynamics, fluid mechanics, plasma physics, optical fibers, biology, solid state physics, chemical kinematics, geochemistry, nanotechnology etc. By the aid of exact solutions, when they exist, the phenomena modeled by these NLEEs can be better understood. Therefore, the study of the traveling wave solutions for NLEEs plays an important role in the study of nonlinear physical phenomena.
In recent years, the exact solutions of NLEEs have been investigated by many authors who are interested in nonlinear physical phenomena. Many powerful methods have been presented by diverse group of mathematicians and physicists such as the Hirota’s bilinear transformation method (Hirota 1973) (Hirota and Satsuma 1981), the tanh-function method (Malfliet 1992; Nassar et al. 2011), the F-expansion method (Zhou et al. 2003), the (G′/G)-expansion method (Wang et al. 2008; Zayed 2010; Zayed and Al-Joudi 2010, Zayed and Gepreel 2009; Akbar et al. 2012a, 2012b, 2012c, 2012d; Akbar and Ali 2011a; Shehata 2010; Zayed and Al-Joudi 2010; Naher et al. 2012a, 2013; Naher and Abdullah 2012, 2013), the enhanced (G′/G)-expansion method (Khan et al. 2014, Khan and Akbar, 2014; Islam et al. 2014), the Exp-function method (He and Wu 2006; Bekir and Boz 2008; Akbar and Ali 2011b; Naher et al. 2011, 2012b; Yusufoglu 2008), the homogeneous balance method (Wang 1995; Zayed et al, 2004), the Adomian decomposition method (Adomian 1994), the homotopy perturbation method (Mohiud-Din 2007), the extended tanh-method (Abdou 2007; Fan 2000), the auxiliary equation method (Sirendaoreji 2004), the Jacobi elliptic function method (Ali 2011), Modified Exp-function method (He et al. 2012), the Modified simple equation method (Jawad et al. 2010; Zayed 2011; Zayed and Ibrahim 2012) and so on.
The purpose of this paper is to apply the MSE method to construct the exact solutions for nonlinear evolution equations in mathematical physics via the DMBBM equation and cKG equation. The DMBBM equation and cKG equation are NLEEs representing the balance of dispersion and weak nonlinearity in physical systems that generate solitary waves.
The article is prepared as follows: The MSE method, Applications, Graphical representation of some obtained solutions, Comparisons, and conclusions.
The MSE method
Consider a general nonlinear evolution in the form
where ℜ is a polynomial of u(x, y, z, t) and its partial derivatives in which the highest order derivatives and nonlinear terms are involved. In the following, we give the main steps of this method (Jawad et al., 2010; Zayed, 2011, Zayed and Ibrahim, 2012):
Step 1. Using the traveling wave transformation
Eq. (2.1) transform to the following ODE:
where ℘ is a polynomial in u(ξ) and its derivatives, while , and so on.
Step 2. We suppose that Eq.(2.3) has the formal solution
where β k are arbitrary constants to be determined, such that β N ≠ 0, and Φ(ξ) is an unknown function to be determined later.
Step 3. We determine the positive integer N in Eq. (2.4) by considering the homogeneous balance between the highest order derivatives and the nonlinear terms in Eq. (2.3).
Step 4. We substitute (2.4) into (2.3), we calculate all the necessary derivatives u′ , u″ , ⋯ and then we account the function Φ(ξ). As a result of this substitution, we get a polynomial of Φ′(ξ)/Φ(ξ) and its derivatives. In this polynomial, we equate with zero all the coefficients of Φ- i(ξ), where i = 0, 1, 2, ⋯. This operation yields a system of equations which can be solved to find β k and Φ(ξ). Consequently, we can get the exact solutions of Eq. (2.1).
Applications
The (1 + 1)-dimensional nonlinear dispersive modified Benjamin-Bona
Mahony equation: In this section, we will apply the modified simple equation method to find the exact solutions and then the solitary wave solutions of (1 + 1)-dimensional nonlinear DMBBM equation,
where α is a nonzero constant. This equation was first derived to describe an approximation for surface long waves in nonlinear dispersive media. It can also characterize the hydro magnetic waves in cold plasma, acoustic waves in inharmonic crystals and acoustic gravity waves in compressible fluids (Yusufoglu 2008; Zayed and Al-Joudi 2010).
The traveling wave transformation is
Using traveling wave Eq. (3.2), Eq. (3.1) transforms into the following ODE
Integrating with respect to ξ choosing constant of integration as zero, we obtain the following ODE
Now balancing the highest order derivative u″ and non-linear term u3, we get
3N = N + 2, which gives N = 1
Now for N = 1, becomes
where β0 and β1 are constants to be determined such that β1 ≠ 0, while ψ(ξ) is an unknown function to be determined. It is easy to see that
Now substituting the values of u″, u, u3 in equation (3.3) and then equating the coefficients of Φ0, Φ- 1, Φ- 2, Φ- 3 to zero, we respectively obtain
Solving Eq. (3.8), we get
Solving Eq. (3.11), we get
and β1 ≠ 0
Case I: when β0 = 0 solving Eqs. (3.9), and (3.10) we get trivial solution. So this case is rejected.
Case II: when , Eqs. (3.9) and (3.10) yields
where .
Integrating, Eq. (3.12) with respect to ξ, we obtain
From Eqs. (3.13) and (3.10), we obtain
Therefore, upon integration, we obtain
where c1 and c2 are arbitrary constants.
Substituting the values of Φ and Φ′ into Eq. (3.5), we obtain the following exact solution,
Putting the values of β0, β1, l and simplifying, we obtain
Since c1 and c2 are arbitrarily constants, consequently, if we set c1 = - 2 c2(1 - ω) and , Eq. (3.17) reduces to the following traveling wave solution:
Again setting c1 = 2 c2(1 - ω) and if , Eq. (3.17) reduces to the following singular traveling wave solutions:
If , Eqs. (3.18) and (3.19) yields the following periodic solutions:
and
Remark 1: From solutions (3.18)-(3.21) we conclude that ω ≠ 1.
The coupled Klein-Gordon equation
Now we will bring to bear the MSE method to find exact solutions and then the solitary wave solutions to the cKG Equation in the form,
where
The traveling wave Eq. (3.23) reduces Eqs. (3.22) into the following ODEs
By integrating Eq. (3.25) with respect to ξ, and neglecting the constant of integration we obtain
Substituting Eq. (3.26) into Eq. (3.24) we get,
Balancing the highest order derivative u″ and nonlinear term u3 from Eq. (3.27), we obtain N = 1
Now for N = 1, Eq. (2.4) becomes
where β0 and β1 are constants to be determined such that β1 ≠ 0, while Φ(ξ) is an unknown function to be determined. It is easy to see that
Now substituting the values of u″, u, u3 in Eq. (3.27) and then equating the coefficients of Φ0, Φ- 1, Φ- 2, Φ- 3 to zero, we respectively obtain
Solving Eq. (3.31), we get
Solving Eq. (3.34), we get
Case-I: When β0 = 0, Eq. (3.32) and (3.33) yields a trivial solution. So this case is rejected.
Case-II: When , Eqs. (3.32) and (3.33) yields,
Integrating, Eq. (3.35) with respect to ξ, we obtain
From Eqs. (3.36) and (3.32), we obtain
Therefore, integration Eq. (3.37), we obtain
where c1 and c2 are constants of integration.
Substituting the values of Φ and Φ′ into Eq. (3.28), we obtain the following exact solution,
Putting the values of β0, β1 into Eq. (3.39) and then simplifying, we obtain
We can freely choose the constants c1 and c2. Therefore, if we set , Eq. (3.40) reduces to:
Again, if we set , Eq. (3.40) reduces to:
Using hyperbolic identities, in trigonometric form Eqs. (3.41) and (3.42) can be written as follows:
Now applying Eqs. (3.41)-(3.44) into Eq. (3.26), we get
Remark 2: From solutions (3.41)-(3.48) we conclude that ω ≠ ± 1.
Graphical representation of some obtained solutions
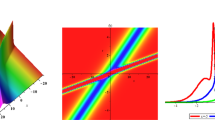
In this section, we put forth to illustrate the three-dimensional and two-dimensional structure of the determined solutions of the studied NLEEs, to visualize the inner mechanism of them.
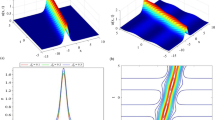
Figure 1 and Figure 2 represent the shape of solutions (3.18) and (3.20) of DMBBM equation. On the other hand, Figure 3 and Figure 4 show the profile of solutions (3.46) and (3.48) of cKG equation.

Kink (topological soliton) profile of DMBBM equation for ω =0.20, α =1. (Only shows the shape of (3.18), The left figure shows the 3-D plot and the right figure shows the 2-D plot for t = 0.

Periodic graph of DMBBM equation for ω =2, α =3. (Only shows the shape of (3.20)), The left figure shows the 3-D plot and the right figure shows the 2-D plot for t = 0.

Bell (non- topological soliton) profile of cKG equation for ω =1.50. (Only shows the shape of solution (3.46)), The left figure shows the 3-D plot and the right figure shows the 2-D plot for t = 0.

Periodic profile of cKG equation for ω =0.75. (Only shows the shape of (3.48)), The left figure shows the 3-D plot and the right figure shows the 2-D plot for t = 0.
Comparisons
With extended (G′/G)-expansion method:
Zayed and Al-Joudi (2010) investigated exact solutions of the traveling wave solutions of the DMBBM equation by using the extended (G′/G)-expansion method and obtained six solutions. On the contrary by using the MSE method in this article we obtained eight solutions. However, Some of the solutions obtained by Zayed and Al-Joudi (2010) coincide with our solutions. If we set ω = 1 + 2μ in our solutions (3.18) and (3.19), we conclude that our results coincide to the solution (3.9) obtained by Zayed and Al-Joudi (2010) for A ≠ 0, B = 0, μ < 0, σ = ± 1 and A = 0, B ≠ 0, μ < 0, σ = ± 1 respectively. Similarly, solutions (3.20) and (3.21) obtained in this article correspond to the solution (3.12) obtained by Zayed and Al-Joudi (2010) for A ≠ 0, B = 0, μ > 0, σ = ± 1 and A = 0, B ≠ 0, μ > 0, σ = ± 1 respectively.
Moreover, Zayed and Al-Joudi (2010) used the symbolic computation software such as Maple or Mathematica to facilitate the calculation of the algebraic equations occurred in the solution procedure. Without symbolic computation software even it is impossible to get the solutions of the complicated algebraic equations. In addition, Zayed and Al-Joudi (2010) used the solutions of an auxiliary equation G″(ξ) + μG(ξ) = 0 to find exact traveling wave solutions of NLEEs. On the other hand it is worth mentioning that the exact solutions of the studied NLEEs have been achieved in this article without using any symbolic computations software, since the computations are very simple and easy. Similarly for any nonlinear evolution equation it can be shown that the MSE method is much easier than other methods. Furthermore, auxiliary equations are unnecessary to solve NLEEs by means of MSE methods, i.e., there exists no predefined functions or equations in MSE method.
Conclusions
This study shows that the MSE method is quite efficient and practically well suited for use to find exact traveling wave solutions of the DMBBM equation and cKG equation. We have obtained exact solutions of these equations in terms of the hyperbolic and trigonometric functions. This study also shows that the procedure is simple, direct and constructive. The reliability of the method and the reduction in the size of computational domain give this method a wider applicability. We conclude that the studied method can be used for many other NLEEs in mathematical physics and engineering fields.
References
Abdou MA: The extended tanh-method and its applications for solving nonlinear physical models. App Math Comput 2007, 190: 988-996. 10.1016/j.amc.2007.01.070
Adomian G: Solving frontier problems of physics: The decomposition method. Kluwer Academic, Boston, M A; 1994.
Akbar MA, Ali NHM, Zayed EME: Abundant exact traveling wave solutions of the generalized Bretherton equation via (G′/G)-expansion method. Commun Theor Phys 2012, 57: 173-178. 10.1088/0253-6102/57/2/01
Akbar MA, Ali NHM, Zayed EME: A generalized and improved (G′/G)- expansion method for nonlinear evolution equations. Math Prob Engr 2012, 2012: 22. doi:10.1155/2012/459879
Akbar MA, Ali NHM, Mohyud-Din ST: The alternative (G′/G)- expansion method with generalized Riccati equation: Application to fifth order (1+1)- dimensional Caudrey-Dodd-Gibbon equation. Int J Phys Sci 2012, 7(5):743-752.
Akbar MA, Ali NHM, Mohyud-Din ST: Some new exact traveling wave solutions to the (3 + 1)-dimensional Kadomtsev-Petviashvili equation. World Appl Sci J 2012, 16(11):1551-1558.
Akbar MA, Ali NHM: The alternative (G′/G)-expansion method and its applications to nonlinear partial differential equations. Int J Phys Sci 2011, 6(35):7910-7920.
Akbar MA, Ali NHM: Exp-function method for Duffing Equation and new solutions of (2 + 1) dimensional dispersive long wave equations. Prog Appl Math 2011, 1(2):30-42.
Ali AT: New generalized Jacobi elliptic function rational expansion method. J Comput Appl Math 2011, 235: 4117-4127. 10.1016/j.cam.2011.03.002
Bekir A, Boz A: Exact solutions for nonlinear evolution equations using Exp- function method. Phys Lett 2008, 372: 1619-1625. 10.1016/j.physleta.2007.10.018
Fan EG: Extended tanh-method and its applications to nonlinear equations. Phys Lett 2000, 277: 212-218. 10.1016/S0375-9601(00)00725-8
He Y, Li S, Long Y: Exact solutions of the Klein-Gordon equation by modified Exp-function method. Int Math Forum 2012, 7(4):175-182.
He JH, Wu XH: Exp-function method for nonlinear wave equations. Chaos, Solitons and Fract 2006, 30: 700-708. 10.1016/j.chaos.2006.03.020
Hirota R: Exact envelope soliton solutions of a nonlinear wave equation. J Math Phy 1973, 14: 805-810. 10.1063/1.1666399
Hirota R, Satsuma J: Soliton solutions of a coupled KDV equation. Phy Lett A 1981, 85: 404-408.
Islam MH, Khan K, Akbar MA, Salam MA: Exact Traveling Wave Solutions of Modified KdV–Zakharov–Kuznetsov Equation and Viscous Burgers Equation. SpringerPlus 2014, 3: 105. doi:10.1186/2193-1801-3-105
Jawad AJM, Petkovic MD, Biswas A: Modified simple equation method for nonlinear evolution equations. Appl Math Comput 2010, 217: 869-877. 10.1016/j.amc.2010.06.030
Khan K, Akbar MA, Salam MA, Islam MH: A note on enhanced (G′/G) -expansion method in nonlinear physics. Ain Shams Engineering Journal 2014, 5: 877-884.http://dx.doi.org/10.1016/j.asej.2013.12.013 10.1016/j.asej.2013.12.013
Khan K, Akbar MA: Study of analytical method to seek for exact solutions of variant Boussinesq equations. SpringerPlus 2014, 3: 324. doi:10.1186/2193-1801-3-324
Malfliet M: Solitary wave solutions of nonlinear wave equations. Am J Phys 1992, 60: 650-654. 10.1119/1.17120
Mohiud-Din ST: Homotopy perturbation method for solving fourth-order boundary value problems. Math Prob Engr 2007, 2007: 1-15. Article ID 98602, doi:10.1155/2007/98602
Naher H, Abdullah AF, Akbar MA: New traveling wave solutions of the higher dimensional nonlinear partial differential equation by the Exp-function method. J Appl Math 2012. Article ID 575387, 14 pages. doi:10.1155/2012/575387
Naher H, Abdullah AF, Akbar MA: The Exp-function method for new exact solutions of the nonlinear partial differential equations. Int J Phys Sci 2011, 6(29):6706-6716.
Naher H, Abdullah FA, Bekir A: Abundant traveling wave solutions of the compound KdV-Burgers equation via the improved (G′/G)-expansion method. AIP Adv 2012. 2, 042163.http://dx.doi.org/10.1063/1.4769751
Naher H, Abdullah FA, Akbar MA: Generalized and improved (G′/G)-expansion method for (3 + 1)-dimensional modified KdV–Zakharov–Kuznetsev equation. PLoS One 2013, 8(5):e64618. 10.1371/journal.pone.0064618
Naher H, Abdullah FA: Some new traveling wave solutions of the nonlinear reaction diffusion equation by using the improved (G′/G)-expansion method. Math Prob Engr 2012, 2012: 17.http://dx.doi.org/10.1155/2012/871724
Naher H, Abdullah FA: New approach of (G′/G)-expansion method and new approach of generalized (G′/G)-expansion method for nonlinear evolution equation. AIP Adv 2013, 3(3):032116. 10.1063/1.4794947
Nassar HA, Abdel-Razek MA, Seddeek AK: Expanding the tanh-function method for solving nonlinear equations. Appl Math 2011, 2: 1096-1104. 10.4236/am.2011.29151
Shehata AR: The traveling wave solutions of the perturbed nonlinear Schrodinger equation and the cubic-quintic Ginzburg Landau equation using the modified (G′/G)-expansion method. Appl Math Comput 2010, 217: 1-10. 10.1016/j.amc.2010.03.047
Sirendaoreji : New exact travelling wave solutions for the Kawahara and modified Kawahara equations. Chaos Solitons Fract 2004, 19: 147-150. 10.1016/S0960-0779(03)00102-4
Wang M: Solitary wave solutions for variant Boussinesq equations. Phys Lett 1995, 199: 169-172. 10.1016/0375-9601(95)00092-H
Wang M, Li X, Zhang J: The (G′/G)-expansion method and travelling wave solutions of nonlinear evolution equations in mathematical physics. Phys Lett 2008, 372: 417-423. 10.1016/j.physleta.2007.07.051
Yusufoglu E: New solitary solutions for the MBBM equations using Exp-function method. Phys Lett 2008, 372: 442-446. 10.1016/j.physleta.2007.07.062
Zayed EME: A note on the modified simple equation method applied to Sharma- Tasso-Olver equation. Appl Math Comput 2011, 218: 3962-3964. 10.1016/j.amc.2011.09.025
Zayed EME, Ibrahim SAH: Exact solutions of nonlinear evolution equations in Mathematical physics using the modified simple equation method. Chinese Phys Lett 2012, 29(6):060201. 10.1088/0256-307X/29/6/060201
Zayed EME, Zedan HA, Gepreel KA: On the solitary wave solutions for nonlinear Hirota-Sasuma coupled KDV equations. Chaos, Solitons and Fractals 2004, 22: 285-303. 10.1016/j.chaos.2003.12.045
Zayed EME, Al-Joudi S: Applications of an extended (G′/G)-expansion method to find exact solutions of nonlinear PDEs in mathematical physics. Math Prob Engr 2010. 19 pages, doi:10.1155/2010/768573
Zayed EME: Traveling wave solutions for higher dimensional nonlinear evolution equations using the (G′/G)-expansion method. J Appl Math Informatics 2010, 28: 383-395.
Zayed EME, Gepreel KA: The (G′/G)-expansion method for finding the traveling wave solutions of nonlinear partial differential equations in mathematical physics. J Math Phys 2009, 50: 013502-013514. 10.1063/1.3033750
Zhou YB, Wang ML, Wang YM: Periodic wave solutions to coupled KdV equations with variable coefficients. Phys Lett 2003, 308: 31-36. 10.1016/S0375-9601(02)01775-9
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
This work was carried out in collaboration among the authors. All authors have a good contribution to design the study, and to perform the analysis of this research work. All authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0), which permits use, duplication, adaptation, distribution, and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Cite this article
Khan, K., Akbar, M.A. & Islam, S.M.R. Exact solutions for (1 + 1)-dimensional nonlinear dispersive modified Benjamin-Bona-Mahony equation and coupled Klein-Gordon equations. SpringerPlus 3, 724 (2014). https://doi.org/10.1186/2193-1801-3-724
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/2193-1801-3-724