
Abstract
Mathematical modeling of many physical systems leads to nonlinear evolution equations because most physical systems are inherently nonlinear in nature. The investigation of traveling wave solutions of nonlinear partial differential equations (NPDEs) plays a significant role in the study of nonlinear physical phenomena. In this article, we construct the traveling wave solutions of modified KDV-ZK equation and viscous Burgers equation by using an enhanced (G '/G) -expansion method. A number of traveling wave solutions in terms of unknown parameters are obtained. Derived traveling wave solutions exhibit solitary waves when special values are given to its unknown parameters.
Mathematics subject classification
35C07; 35C08; 35P99
Similar content being viewed by others

Background
Engineers, physicists, and mathematicians have always shown their incessant interest in studying nonlinear problems related to numerous scientific applications, such as fluid dynamics, high-energy physics, plasma physics, elastic media, optical fibers, biomathematics, chemical kinematics, chemical physics and geochemistry. Many young scientists have also shown their increased interest in last two decades because of plausible development of nonlinear science during this period of time. In order to understand the behavior of a nonlinear phenomenon we need to solve the nonlinear equation/set of equations describing that phenomenon, is often very much challenging. There are so many approaches developed over years to analyze/solve such system of nonlinear equations, most of them are based on some assumptions, and hence approximations. Though perturbation methods, like other nonlinear analysis techniques, have their own limitations, are most useful methods among all these approaches so far. Using perturbation method, to achieve the ideal results an appropriate choice of small parameter has to be made efficiently, otherwise, a fatal error in results may occur. The perturbation methods are not even applicable to many nonlinear equations because of not having small parameter, which is the principal assumption that has to be met by an equation in order to apply perturbation method. Furthermore, the approximate solutions obtained using perturbation methods are valid only for the small values of the parameters (Ghorbani and Saberi-Nadjafi [2007]; Mohiud-Din [2007]; Mohyud-Din and Noor, [2009]). The investigation of exact traveling wave solutions to these nonlinear equations (NPDEs) have also been observed as a field of great interest to many mathematicians and physicists because of its significant role in understanding the behavior of nonlinear physical phenomena. As a result, numerous techniques of obtaining traveling wave solutions have been developed over last three decades, such as, the Hirota’s bilinear transformation method (Hirota [1973, 1981]), the modified simple equation method (Jawad et al. [2010]; Khan and Akbar [2013a]; Ahmed et al. [2013]; Zayed and Hoda [2013]; Zayed and Arnous [2012]), the tanh-function method (Wazwaz [2005]; Parkes and Duffy [1996]), the Exp-function method (He and Wu [2006]; Akbar and Ali [2011b]; Bekir and Boz [2008]; Xu et al. [2009]), the Jacobi elliptic function method (Ali [2011]), the (G '/G) -expansion method (Akbar et al. [2012a, 2012b]; Akbar and Ali [2011a]; Wang et al. [2008]; Shehata [2010]; Koll and Tabi [2011]; Naher et al. [2013]; Zayed [2009, 2010]; Aslan [2010]; Bekir and Aksoy [2012]), the homotopy perturbation method (Mohiud-Din [2007]; Mohyud-Din and Noor [2009]), transformed rational function method (Ma and Jyh [2009]; Ma and Fuchssteiner [1996]), multiple exp-function method (Ma et al. [2010]; Ma and Zhu [2012]), generalize Hirota bilinear method (Ma [2013]), enhanced (G '/G) -expansion method (Khan and Akbar [2013b]), The Sine-Cosine method (Bibi and Mohyud-Din [2013]), the first integral method (Tascan and Bekir [2010]; Feng [2002]), the ansatz method (Hu [2001a, 2001b]) and many others.
The present article is devoted to construct the exact solutions for modified KDV-ZK equation and viscous Burgers equation using a relatively new technique, named, enhanced (G '/G) -Expansion method. The rest of the paper is organized as follows. Details explanation of enhanced (G '/G) -expansion method has been presented in the next section. The obtained solutions of modified KDV-ZK equation and viscous Burgers equation using this method are presented in Section 3. In Section 4, we have presented some graphs of obtained family of solutions for some particular values of the unknown parameters and the final conclusions are shown in Section 5.
Enhanced (G '/G) -expansion method
In this section we describe in details the enhanced (G '/G) -expansion method for finding traveling wave solutions of nonlinear evolution equations. Any nonlinear evolution equation in two independent variables x and t can be expressed in following form:
where u(ξ) = u(x, t) is an unknown function, R is a polynomial of u(x, t) and its partial derivatives in which the highest order derivatives and nonlinear terms are involved. The following steps are involved in finding the solution of nonlinear Equation (2.1) using this method (Khan and Akbar [2013b]):
Step 1: The given PDE (2.1) can be transformed into ODE using the transformation ξ = x ± Wt, where W is the speed of traveling wave such that W ∈ R - {0}.
The traveling wave transformation permits us to reduce Eq. (2.1) to the following ODE:
where R is a polynomial in u(ξ) and its derivatives, where , and so on.
Step 2: We now suppose that Eq. (2.2) has a general solution of the form
subject to the condition that G = G(ξ) satisfy the equation
where a i , b i (-n ≤ i ≤ n; n ∈ N) and λ are constants to be determined, provided that σ = ± 1 and μ ≠ 0.
Step 3: The positive integer n can be determined by balancing the highest order derivatives to the highest order nonlinear terms appear in Eq. (2.1) or in Eq. (2.2). More precisely, we define the degree of u(ξ) as D(u(ξ)) = n which gives rise to the degree of other expression as follows:
Step 4: We substitute Eq. (2.3) into Eq. (2.2) and use Eq. (2.4). We then collect all the coefficients of (G '/G)j and together. Since Eq. (2.3) is a solution of Eq. (2.2), we can set each of the coefficient equal to zero which leads to a system of algebraic equations in terms of a i , b i (-n ≤ i ≤ n; n ∈ N), λ, and W. One can solves easily these system equations using Maple.
Step 5: For μ < 0 general solution of Eq. (2.4) gives
and
And for μ > 0, we get
and
where A is an arbitrary constant. Finally, we can construct a number of families of traveling wave solutions of Eq. (2.1) by substituting the values of a i , b i (-n ≤ i ≤ n; n ∈ N), λ, and W (obtained in Step 3) and using Eqs. (2.6) - (2.9) into Eq. (2.3).
Applications of enhanced (G '/G) -expansion method to modified KDV-ZK equation and viscous Burgers equation
Modified KDV-ZK equation
In this current sub-section, we apply enhanced (G '/G) -expansion method to solve the modified KDV-ZK equation of the form,
where d is a nonzero constant.
The traveling wave transformation equation u(ξ) = u(x, t), ξ = x + y + z - Wt transform Eq. (3.1) into the following ordinary differential equation:
Integrating Eq. (3.2) with respect to ξ, we obtain
where R is a constant of integration. Following the process as described in step 3 (Section 2), balance between the highest-ordered derivative term u'' and nonlinear term u3 of Eq. (3.3) provides n = 1.
For n = 1 Eq. (2.3) takes the following form:
where G = G(ξ) satisfies Eq. (2.4). Substituting Eq. (3.4) into Eq. (3.3) and using Eq. (2.4), we get a polynomial in (G '/G)j and . Setting the coefficient of (G '/G)j and equal to zero, we obtain a system containing a large number of algebraic equations in terms of unknown coefficients. We have solved this system of equations using Maple 13 and obtained the following set of solutions:
Set 1: .
Set 2: .
Set 3: .
Set 4: .
Set 5: .
Set 6: .
Corresponding to each set of solution we get two different families of traveling wave solutions of Eq. (3.1) according as μ < 0 and μ > 0. In doing so, we have obtained twelve families of traveling wave solutions while each family comprises of two solutions.
First we represent the families of hyperbolic solutions corresponding to μ < 0:
Family 1:
where ξ = x + y + z + 12μt.
Family 2:
where ξ = x + y + z - 6μt.
Family 3:
where .
Family 4:
where ξ = x + y + z - 6μt.
Family 5:
where ξ = x + y + z + 3μt.
Family 6:
where ξ = x + y + z + 3μt.
And, the families of plane periodic solutions corresponding to μ > 0 are:
Family 7:
where ξ = x + y + z + 12μt.
Family 8:
where ξ = x + y + z - 6μt.
Family 9:
where .
Family 10:
where ξ = x + y + z - 6μt.
Family 11:
where ξ = x + y + z + 3μt.
Family 12:
where ξ = x + y + z + 3μt.
Remark 1: All the obtained solutions have been checked with Maple by putting them back into the original equations and found correct.
Viscous Burgers equation
In this sub-section, we will apply enhanced (G '/G) -expansion method to solve the viscous Burgers equation of the form,
where v is the viscosity coefficient. Burgers equation is a model for nonlinear wave propagation, especially in fluid mechanics. It occurs in various areas of applied mathematics, such as modeling of gas dynamics and traffic flow.
The traveling wave transformation equation u(ξ) = u(x, t), ξ = x - Wt transform Eq. (3.5) into the following ordinary differential equation:
Integrating Eq. (3.6) with respect to ξ setting constant of integration to zero, we obtain
Following the process as described in step 3 (Section 2), balance between the highest-ordered derivative term u' and nonlinear term u2 of Eq. (3.7) provides n = 1.
For n = 1 Eq. (2.3) takes the following form:
where G = G(ξ) satisfies Eq.(2.4). Substituting Eq. (3.8) into Eq. (3.7) and using Eq. (2.4), we get a polynomial in (G '/G)j and . Setting the coefficient of (G '/G)j and equal to zero, we obtain a system containing a large number of algebraic equations in terms of unknown coefficients. We have solved this system of equations using Maple 13 and obtained the following set of solutions:
Set 1: .
Set 2: ,
Set 3: .
Set 4: .
Set 5: .
Set 6: .
According to the parallel course of action the families of hyperbolic solutions corresponding to μ < 0 are:
Family 1:
where .
Family 2:
where .
Family 3:
where .
Family 4:
where .
Family 5:
where .
Family 6:
where .
Similarly, we can write down the other families of exact trigonometric function solutions corresponding to μ > 0 which are omitted for convenience.
Remark 2: All the obtained solutions have been checked with Maple by putting them back into the original equations and found correct.
Graphical representation of solitary waves (obtained from above family of traveling waves)
Modified KDV-ZK Equation
We have obtained total twenty four solution profiles of traveling waves in terms of some unknown parameters; subdivided (above) into twelve families according as negative or positive values of μ. All of these solutions are combination of hyperbolic functions or trigonometric functions but Family-4 and Family-10 which are combination of algebraic functions, and hyperbolic functions or trigonometric functions. Solitary waves can be obtained from each traveling wave solution by setting particular values to its unknown parameters. If we put a0 = 0, then Family 4 and Family 10 coincide with Family 2 and Family 8 respectively. In this section, we have presented some graphs of solitary waves constructed by taking suitable values of involved unknown parameters.
-
For the values of μ = - 1, d = - 2, A = y = z = 0 within the interval - 5 ≤ x, t ≤ 5 Figure 1 is kink wave (only shows the shape of u3(ξ) of mKDV-ZK equation).

Kink wave profile of mKDV-ZK equation.
-
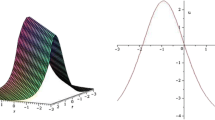
For the values of μ = - 1, d = 1, A = y = z = 0 within the interval - 5 ≤ x, t ≤ 5 Figure 2 is soliton wave (only shows the shape of u12(ξ) of mKDV-ZK equation).

Soliton profile of mKDV-ZK equation.
-
For the values of μ = 0.50, d = - 1, A = 3, y = z = 0 within the interval - 5 ≤ x, t ≤ 5, Figure 3 is a periodic wave (only shows the shape of u15(ξ) of mKDV-ZK equation).

Periodic wave profile of mKDV-ZK equation.
-
For the values of μ = 1, d = - 2, A = y = z = 0 within the interval - 5 ≤ x, t ≤ 5, u24(ξ) (solution of mKDV-ZK equation) shows the shape of periodic wave represented in Figure 4.

Periodic wave profile of mKDV-ZK equation.
Viscous Burgers equation
Now we will discuss some of the obtained results of viscous Burgers equation and their graphical representations.
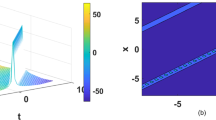
For the values of A = 0, μ = - 2, σ = 1 and ν = - 2 within the interval - 3 ≤ x, t ≤ 3 the solution of viscous Burgers equation u1(ξ) shows Kink wave which is represented in Figure 5 and For the values of a0 = 0, A = 0, μ = - 1, σ = - 1 and ν = - 0.50 within the interval - 3 ≤ x, t ≤ 3 the solution of viscous Burgers equation u3(ξ) shows singular kink wave which is represented in Figure 6. Some graphical representations of viscous Burgers equation are given below:

Kink profile of viscous Burgers equation (Shape of u 1 ( ξ )).

Singular kink profile of viscous Burgers equation (Shape of u 3 ( ξ )).
Conclusions
In this article, we obtain a large number of exact traveling wave solutions including solitary wave solutions for modified KDV-ZK equation and viscous Burgers equation through enhanced (G '/G))-expansion method. Using this method, we have found some extra family of solutions, is the best thing about this method. The obtained solutions suggest that enhanced (G '/G))-expansion method can be used as useful mathematical tool for solving nonlinear evolution equations arises in the arena of mathematical physics, engineering sciences and applied mathematics.
References
Ahmed MT, Khan K, Akbar MA: Study of nonlinear evolution equations to construct traveling wave solutions via modified simple equation method. Physical Review & Research International 2013, 3(4):490-503.
Akbar MA, Ali NHM: The alternative (G′/G)-expansion method and its applications to nonlinear partial differential equations. Int J Phys Sci 2011, 6(35):7910-7920.
Akbar MA, Ali NHM: Exp-function method for Duffing equation and new solutions of (2 + 1) dimensional dispersive long wave equations. Prog Appl Math 2011, 1(2):30-42.
Akbar MA, Ali NHM, Zayed EME: Abundant exact traveling wave solutions of the generalized Bretherton equation via (G′/G)-expansion method. Commun Theor Phys 2012, 57: 173-178. 10.1088/0253-6102/57/2/01
Akbar MA, Ali NHM, Mohyud-Din ST: The alternative (G′/G)-expansion method with generalized Riccati equation: application to fifth order (1 + 1)-dimensional Caudrey-Dodd-Gibbon equation. Int J Phys Sci 2012, 7(5):743-752.
Ali AT: New generalized Jacobi elliptic function rational expansion method. J Comput Appl Math 2011, 235: 4117-4127. 10.1016/j.cam.2011.03.002
Aslan I: Analytic solutions to nonlinear differential-difference equations by means of the extended (G’/G) expansion method. J Phys A Math Theor 2010, 43: 395207(10pp).
Bekir A, Aksoy E: Exact solutions of shallow water wave equations by using the (G’/G)-expansion method. Waves Random Complex Media 2012, 22(3):317-331. 10.1080/17455030.2012.683890
Bekir A, Boz A: Exact solutions for nonlinear evolution equations using Exp-function method. Phy Lett A 2008, 372: 1619-1625. 10.1016/j.physleta.2007.10.018
Bibi S, Mohyud-Din ST: Traveling wave solutions of KdVs using sine-cosine method. J Assn Arab Univ Basic Appl Sci 2013. doi: org/10.1016/j.jaubas. 2013.03.006 (in press)
Feng Z: The first-integral method to study the Burgers-Korteweg-de Vries equation. J Phys A 2002, 35(2):343-349. 10.1088/0305-4470/35/2/312
Ghorbani A, Saberi-Nadjafi J: He's Homotopy Perturbation Method for Calculating Adomian Polynomials. Int J Nonlinear Sci Numer Simul 2007, 8(2):229-232.
He JH, Wu XH: Exp-function method for nonlinear wave equations. Chaos Solitons and Fract 2006, 30: 700-708. 10.1016/j.chaos.2006.03.020
Hirota R: Exact envelope soliton solutions of a nonlinear wave equation. J Math Phy 1973, 14: 805-810. 10.1063/1.1666399
Hirota R, Satsuma J: Soliton solutions of a coupled KDV equation. Phy Lett A 1981, 85: 404-408.
Hu JL: A new method for finding exact traveling wave solutions to nonlinear partial differential equations. Phys Lett A 2001, 286: 175-179. 10.1016/S0375-9601(01)00291-2
Hu JL: Explicit solutions to three nonlinear physical models. Phys Lett A 2001, 287: 81-89. 10.1016/S0375-9601(01)00461-3
Jawad AJM, Petkovic MD, Biswas A: Modified simple equation method for nonlinear evolution equations. Appl Math Comput 2010, 217: 869-877. 10.1016/j.amc.2010.06.030
Khan K, Akbar MA: Exact and solitary wave solutions for the Tzitzeica–Dodd–Bullough and the modified KdV– Zakharov–Kuznetsov equations using the modified simple equation method. Ain Shams Eng J 2013, 4: 903-909. doi: org/10.1016/j.asej.2013.01.010 10.1016/j.asej.2013.01.010
Khan K, Akbar MA: Traveling wave solutions of nonlinear evolution equations via the enhanced (G′/G)-expansion method. Journal of the Egyptian Mathematical Society 2013. doi.org/10.1016/j.joems.2013.07.009. (In Press)
Koll GR, Tabi CB: Application of the (G′/G)-expansion method to nonlinear blood flow in large vessels. Phys Scr 2011, 83: 045803(6pp).
Ma WX: Bilinear equations, Bell polynomials and linear superposition principle. J Phys Conf Ser 2013, 411: 012021. doi:10.1088/1742-6596/411/1/012021
Ma WX, Fuchssteiner B: Explicit and exact solutions to a Kolmgorov-Petrovskii-Piskunov equation. Int J of Non-Linear Mechanics 1996, 31(3):329-38. 10.1016/0020-7462(95)00064-X
Ma WX, Jyh HL: A transformed rational function method and exact solutions to the (3 + 1)-dimensional Jimbo–Miwa equation. Chaos Solitons Fractals 2009, 42(3):1356-1363. doi.org/10.1016/j.chaos.2009.03.043 10.1016/j.chaos.2009.03.043
Ma WX, Zhu Z: Solving the (3 + 1)-dimensional generalized KP and BKP equations by the multiple exp-function algorithm. Appl Math Comput 2012, 21811871: 79. doi.org/10.1016/j.amc.2012.05.049
Ma WX, Huang T, Zhang Y: A multiple exp-function method for nonlinear differential equations and its application. Phys Scr 2010, 82: 065003(8pp). doi:10.1088/0031-8949/82/06/065003
Mohiud-Din ST: Homotopy perturbation method for solving fourth-order boundary value problems. Math Prob Engr 2007, 1-15. doi:10.1155/2007/98602
Mohyud-Din ST, Noor MA: Homotopy perturbation method for solving partial differential equations. Zeitschrift für Naturforschung. A Journal of Physical Sciences 2009, 64a: 157-170.
Naher H, Abdullah FA, Akbar MA: Generalized and improved (G′/G)-expansion method for (3 + 1)-dimensional modified KdV-Zakharov-Kuznetsev equation. PLOSONE 2013, 8(5):e64618. doi:10.1371/journal.pone.0064618 10.1371/journal.pone.0064618
Parkes EJ, Duffy BR: An automated tanh-function method for finding solitary wave solutions to non-linear evolution equations. Comput Phys Commun 1996, 98: 288-300. 10.1016/0010-4655(96)00104-X
Shehata AR: The traveling wave solutions of the perturbed nonlinear Schrodinger equation and the cubic-quintic Ginzburg Landau equation using the modified (G′/G) -expansion method. Appl Math Comput 2010, 217: 1-10. 10.1016/j.amc.2010.03.047
Tascan F, Bekir A: Applications of the first integral method to nonlinear evolution equations. Chin Phys B 2010, 19(8):080201. 10.1088/1674-1056/19/8/080201
Wang M, Li X, Zhang J: The (G′/G ) -expansion method and travelling wave solutions of nonlinear evolution equations in mathematical physics. Phys Lett A 2008, 372: 417-23. 10.1016/j.physleta.2007.07.051
Wazwaz AM: The tanh-function method: solitons and periodic solutions for the Dodd-Bullough-Mikhailov and the Tzitzeica-Dodd-Bullough equations. Chaos Solitons and Fractals 2005, 25(1):55-63. 10.1016/j.chaos.2004.09.122
Xu F, Yan W, Chen YL, Li CQ, Zhang YN: Evaluation of two-dimensional ZK-MEW equation using the Exp-function method. Comput Math Appl 2009, 58: 2307-12. 10.1016/j.camwa.2009.03.021
Zayed EME: New traveling wave solutions for higher dimensional nonlinear evolution equations using a generalized (G′/G)-expansion method. J Phys A Math Theor 2009, 42: 195202. 13pp 10.1088/1751-8113/42/19/195202
Zayed EME: Traveling wave solutions for higher dimensional nonlinear evolution equations using the (G′/G)-expansion method. J Appl Math & Informatics 2010, 28(1–2):383-95.
Zayed EME, Arnous AH: Exact solutions of the nonlinear ZK-MEW and the Potential YTSF equations using the modified simple equation method. AIP Conf Proc 2012, 1479: 2044. doi: 10.1063/1.4756591
Zayed EME, Hoda ISA: Modified simple equation method and its applications for some nonlinear evolution equations in mathematical physics. Int J Comp Appl 2013, 67: 6. (0975 – 8887)
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
Authors have declared that no competing interests exist.
Authors’ contributions
This work was carried out in collaboration among the authors. All authors have a good contribution to design the study, and to perform the analysis of this research work. All authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License ( https://creativecommons.org/licenses/by/2.0 ), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Islam, M.H., Khan, K., Akbar, M.A. et al. Exact traveling wave solutions of modified KdV–Zakharov–Kuznetsov equation and viscous Burgers equation. SpringerPlus 3, 105 (2014). https://doi.org/10.1186/2193-1801-3-105
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/2193-1801-3-105