
Abstract
In this paper, we study an integrable system of coupled KdV equations, derived by Gear and Grimshaw (Stud. Appl. Math. 70(3):235-258, 1984), modeling the strong interaction of two-dimensional, long, internal gravity waves propagating on neighboring pycnoclines in a stratified fluid. In particular, we present the complete group classification of the model and find conditions on arbitrary parameters for which the system admits symmetries. Some exact solutions of physical relevance are derived.
Similar content being viewed by others


1 Introduction
In the last years, some types of coupled Korteweg-de Vries (KdV) equations have been encountered in various natural science fields and they are relevant in physical systems such as plasmas, fluids and for describing the lattice vibrations of a crystal at low temperatures. In the literature, some kinds of coupled KdV equations have been introduced to describe two resonantly interacting normal modes of internal-gravity waves in a shallow stratified liquid [1].
Having in mind the rich treasure of nonlinear coupled KdV equations, in this paper we turn our attention to a system introduced by Gear and Grimshaw in [1] to model interactions of solitary waves in a stratified fluid. The model under consideration has the structure of a pair of Korteweg-de Vries equations coupled through both dispersive and nonlinear terms:
where and are the dependent variables and subscripts denote partial derivative with respect to the independent variables t and x; moreover, () and () represent arbitrary constants.
Some mathematical questions related to the Cauchy problem (CP) of (1) were studied by Bona et al. [2] who showed that the (CP) is globally well posed in suitably strong function spaces. Moreover, Bona and Saut also stated that system (1) is susceptible of experiencing the dispersive blow-up phenomenon. Following the guide of the approximate method proposed in [3] (see references therein for a review), an approximate analysis of model (1) is performed in [4].
Motivated by a great number of physical applications, we focus our attention on Lie symmetries admitted by system (1) in order to find conditions on real parameters for which the system does admit symmetries. This is done because the group classification problem is interesting not only from a purely mathematical point of view, but is also important in the applications [5–7]. Originally developed by Lie at the beginning of the nineteenth century, the symmetry analysis plays a key role in almost all scientific fields.
This paper is arranged as follows. In Section 2, we briefly explain the basic definitions and notations required to perform the Lie group analysis, and we provide the vector fields of the symmetries admitted by coupled KdV equations (1). In Section 3, we use some symmetries to reduce (1) and find some exact solutions, whose snapshots are provided in order to show their properties.
2 Symmetry group of coupled KdV equations
In order to discuss the group classification of system (1), we apply the classical Lie theory. Symmetry analysis is very successfully used in several branches of sciences and plays an important role in the theory of differential equations since it allows for the development of systematic procedures to integrate by quadrature - or at least lower the order - of ODEs; in the case of PDEs, Lie symmetries may lead to the determination of invariant solutions of a variety of initial and boundary value problems in different fields such as transport, reaction and diffusion, dissipative phenomena [8–14], of unsteady solutions starting from known steady solutions when the equations are invariant with respect to the so-called projective group (for instance, two-dimensional Euler equations) [15], or to the construction of relations between different differential equations that turn out to be equivalent [16–20]; moreover, by using symmetries of classes of differential equations (equivalence transformations [21, 22]) it is possible to map a system of balance laws to an equivalent system of conservation laws [23, 24].
Then, we look for the one-parameter Lie group of infinitesimal transformations in -space given by
where ε is the group parameter and the associated Lie algebra ℒ is the set of vector fields of the form
We then require the invariance conditions (see [6, 7]), considering the third prolongation of the operator X, under the constraints that the equations at hand be satisfied. The determining system leads to the following results: for arbitrary values of constants, () and (), we have that the principal Lie algebra of system (1) is two-dimensional and is spanned by the operators
On the contrary, the complete symmetry classification of model (1) gives the following extensions of the principal Lie algebra.
Case 1.
If one of the parameters , or is zero, we are able to write in a unified form the corresponding operator
with the position .
A special case arises when both k and are equal to zero; in such a situation, we have operators
Case 2.
When and , we get (, ) along with the following constraint on parameters:
We get the operator
with Δ and () given by
where ; on the contrary, if , we fall in other cases of the classification (if , we fall in Case 4, if or , we recover Case 3).
Case 3.
A singularity arises when , that leads us to considering the special values , , ; then the related operator reads
where .
Case 4.
Finally, another singularity arises if and , whereupon we obtain
and
3 Exact solutions
In this section, we construct some exact solutions which are invariant with respect to some of the symmetries determined above. The main advantage of the procedure is that it allows us to find solutions of the original system of partial differential equations (PDEs) by solving a system of reduced equations which are ordinary differential equations.
Starting from the operator , we obtain the following similarity variable and similarity solution:
The reduced functions and must satisfy the ODEs
A particular solution of (14) is
Then the corresponding solution of (1) reads as
being an arbitrary constant of integration and , whereas and are linked by the relations and .
A second solution can be obtained on the basis of the infinitesimal operator coupled along with the condition ; without loss of generality and in order to simplify the calculations, we neglect space and time translations.
Then the similarity variable and similarity solution read as
The reduced system of (1) assumes the form
An exact solution of (18) is given by
where for compatibility with constraint (7).
Then, in terms of the original variables, a closed form solution of (1) is
Of course, we may include time and space translations directly in the solution simply by means of the replacements and , where and are arbitrary constants.
Two more similarity solutions for generalized coupled KdV equations (1) can be obtained from operator (5). Neglecting once again space and time translations, we obtain
Then the reduced system assumes the following form:
An exact solution of (22) is
, being constants of integration that have to satisfy the following constraints:
Then the corresponding solution of (1) is
In particular, when , excluding the trivial solutions for (24), we are able to write the solution (25) for and .
In the special case , if we consider the linear combination of operators and , () the similarity variables, the reduced system and a possible solution are exactly (21), (24) and (25) respectively, where k and are considered as coefficients of the linear combination of two operators ( and ).
Considering once again the infinitesimal operator (5), we have a second type of solutions that can be expressed in terms of remarkable functions. Skipping the details of calculations, in terms of the original variables, the corresponding solution of (1) reads as
where , is a Bessel function, is a generalized Hypergeometric function, while represents an Euler gamma function, and () constants of integration.
Moreover, , , λ are arbitrary constants, , , and are linked by the relation (for instance, if , then ; on the contrary, implies ).
Finally, another solution of (1) can be obtained by using a linear combination of the operators , and , i.e., considering the operator along with the condition .
Then the similarity variable and similarity solution are
respectively.
The reduced system of (1) assumes the form
Then, in terms of the original variables, a closed form solution of (1) reads as
with , while λ, and are linked by the relation , being an arbitrary constant of integration.
In this case, space and time translation must be included to obtain a relevant new similarity variable.
3.1 Analysis of solutions
The solutions we have found, apart from their own theoretical value, can be used as a benchmark test for numerical schemes and codes.
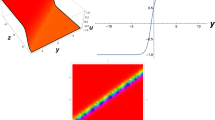
In particular, by the analysis of the solutions obtained which are invariant with respect to the symmetries of Case 1, we can observe that, as shown in Figure 1, the behavior of solution (25) is governed by the Bessel function which is decreasing with increasing argument. Taking into consideration solution (26), we can observe, from Figure 2, an oscillatory profile of the obtained solution. Finally, for what concerns solution (29), we can observe that it can be counted among the rational type solutions as in [25].

The figures represent the bright and the dark solitary wave solutions ( 25 ), where bright is used to describe solitary waves whose peak intensity is larger than background (reflecting applications in optics) and the descriptor dark is used to describe solitary waves with lower intensity than the background, with , , , and .

2D and 3D view of solution ( 26 ) with , , , , , .
In order to show the trend of some of the obtained solutions, just as an example, snapshots of solutions (25), (26) and (29) are shown in Figures 1-3.

2D and 3D view of solution ( 29 ) with , , , , and .
References
Gear JA, Grimshaw R: Weak and strong interactions between internal solitary waves. Stud. Appl. Math. 1984, 70(3):235-258.
Bona JL, Ponce G, Saut J-C, Tom M: A model system for strong interaction between internal solitary waves. Commun. Math. Phys. 1992, 143: 287-313. 10.1007/BF02099010
Ruggieri M, Valenti A: Approximate symmetries in nonlinear viscoelastic media. Bound. Value Probl. 2013., 2013: Article ID 143 10.1186/1687-2770-2013-143
Ruggieri, M, Speciale, MP: Approximate analysis of a generalized KdV-like equations (2013, to appear)
Olver PJ: Applications of Lie Groups to Differential Equations. Springer, New York; 1986.
Ibragimov NH CRC Handbook. In Lie Group Analysis of Differential Equations. CRC Press, Boca Raton; 1994.
Fushchych WI, Shtelen WM: Symmetry Analysis and Exact Solutions of Nonlinear Equations of Mathematical Physics. Kluwer Academic, Dordrecht; 1993.
Ruggieri M, Valenti A: Symmetries and reduction techniques for dissipative models. J. Math. Phys. 2009., 50: Article ID 063506
Ruggieri M, Valenti A: Exact solutions for a nonlinear model of dissipative media. J. Math. Phys. 2011., 52: Article ID 043520
Ruggieri M: Kink solutions for class of generalized dissipative equations. Abstr. Appl. Anal. 2012., 2012: Article ID 237135 10.1155/2012/237135
Oliveri F, Speciale MP: Exact solutions to the equations of ideal gas-dynamics by means of the substitution principle. Int. J. Non-Linear Mech. 1998, 33: 585-592. 10.1016/S0020-7462(97)00037-1
Oliveri F, Speciale MP: Exact solutions to the equations of perfect gases through Lie group analysis and substitution principles. Int. J. Non-Linear Mech. 1999, 34: 1077-1087. 10.1016/S0020-7462(98)00078-X
Oliveri F, Speciale MP: Exact solutions to the unsteady equations of perfect gases through Lie group analysis and substitution principles. Int. J. Non-Linear Mech. 2002, 37: 257-274. 10.1016/S0020-7462(00)00110-4
Oliveri F, Speciale MP: Exact solutions to the ideal magneto-gas-dynamics equations through Lie group analysis and substitution principles. J. Phys. A, Math. Gen. 2005, 38: 8803-8820. 10.1088/0305-4470/38/40/019
Margheriti L, Speciale MP: Unsteady solutions of Euler equations generated by steady solutions. Acta Appl. Math. 2011, 113: 289-303. 10.1007/s10440-010-9600-8
Donato A, Oliveri F: Reduction to autonomous form by group analysis and exact solutions of axi-symmetric MHD equations. Math. Comput. Model. 1993, 18: 83-90.
Donato A, Oliveri F: Linearization procedure of nonlinear first order systems of PDE’s by means of canonical variables related to Lie groups of point transformations. J. Math. Anal. Appl. 1994, 188: 552-568. 10.1006/jmaa.1994.1445
Currò C, Oliveri F:Reduction of nonhomogeneous quasilinear systems to homogeneous and autonomous form. J. Math. Phys. 2008., 49: Article ID 103504
Oliveri F: Lie symmetries of differential equations: classical results and recent contributions. Symmetry 2010, 2: 658-706. 10.3390/sym2020658
Oliveri F: General dynamical systems described by first order quasilinear PDEs reducible to homogeneous and autonomous form. Int. J. Non-Linear Mech. 2012, 47: 53-60. 10.1016/j.ijnonlinmec.2011.08.012
Ovsiannikov LV: Group Analysis of Differential Equations. Academic Press, New York; 1982.
Lisle, IG: Equivalence transformations for classes of differential equations. PhD dissertation, University of British Columbia, Vancouver B.C., Canada (1992)
Oliveri F, Speciale MP: Equivalence transformations of quasilinear first order systems and reduction to autonomous and homogeneous form. Acta Appl. Math. 2012, 122: 447-460.
Oliveri F, Speciale MP: Reduction of balance laws to conservation laws by means of equivalence transformations. J. Math. Phys. 2013., 54: Article ID 041506
Darwish A, Fan EG: A series of new explicit exact solutions for the coupled Klein-Gordon-Schrodinger equations. Chaos Solitons Fractals 2004, 20: 609-617. 10.1016/S0960-0779(03)00419-3
Acknowledgements
The authors acknowledge the financial support by G.N.F.M. of INdAM through the project Metodologie di tipo analitico e numerico per lo studio di problemi iperbolici ed iperbolico-parabolici di natura ondosa.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
The authors wrote this paper in collaboration and with the same responsibility. All authors read and approved the final version of the manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Ruggieri, M., Speciale, M.P. Similarity reduction and closed form solutions for a model derived from two-layer fluids. Adv Differ Equ 2013, 355 (2013). https://doi.org/10.1186/1687-1847-2013-355
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2013-355