
Abstract
This paper presents new results on anti-periodic solutions for impulsive high-order Hopfield neural networks with time-varying delays in the leakage terms. By employing a novel proof, some criteria are derived for guaranteeing the existence and exponential stability of the anti-periodic solution, which are new and complement previously known results. Moreover, a numerical simulation is given to show the effectiveness.
Similar content being viewed by others

1 Introduction
In this paper, we discuss anti-periodic solutions for impulsive high-order Hopfield neural networks (IHHNNs) with time-varying delays in the leakage terms
where and n is the number of units in a neural network, corresponds to the state vector of the i th unit at time t, represents the rate at which the i th unit will reset its potential to the resting state in isolation when disconnected from the network and external inputs, and are the first- and second-order connection weights of the neural network, denotes the leakage delay and for all . , , correspond to the transmission delays, denotes the external inputs at time t, and is the activation function of signal transmission. , , , , , , , , are continuous functions on R. is a positive constant. , , , , . are impulsive moments satisfying and . is the initial condition and denotes real-valued continuous functions defined on , .
The impulsive differential equations have been proposed in many fields such as control theory, physics, chemistry, population dynamics, biotechnologies, industrial robotics, economics, etc. [1–3]. High-order neural networks have been the object of intensive analysis by numerous authors since high-order neural networks have stronger approximation property, faster convergence rate, greater storage capacity, and higher fault tolerance than lower-order neural networks [4–8]. Thus, many high-order Hopfield neural networks with impulses have been studied extensively, and a great deal of literature focuses on the existence and stability of equilibrium points, periodic solutions, almost periodic solutions and anti-periodic solutions [9–16]. However, to the best of our knowledge, few authors have considered the existence and stability of an anti-periodic solution of system (1.1) with the leakage delay . We mention that arguments in [9–16] are not applicable to system (1.1).
The purpose of this paper is to discuss the existence and exponential stability of an anti-periodic solution for IHHNNs with time-varying delays in the leakage terms of system (1.1). The outline of the paper is as follows. In Section 2, some preliminaries and basic results are established. In Section 3, we give sufficient conditions for the existence and exponential stability of an anti-periodic solution for system (1.1). In Section 4, we give an example and numerical simulation to illustrate our results.
2 Preliminaries and basic results
Throughout this paper, we assume that the following conditions hold.
() For and , where denotes the set of all positive integers, there exists a constant such that
() For , there exist constants , , , , , , , such that
() for and .
() There exists such that
() For each , the activation functions are continuous and there exist nonnegative constants and M such that, for all ,
() For all and , there exist positive constants and η such that
For convenience, let be the set of all real vectors. We use to denote a column vector, in which the symbol (T) denotes the transpose of a vector. As usual in the theory of impulsive differential equations, at the points of discontinuity of the solution , we assume that . It is clear that, in general, the derivative does not exist. On the other hand, according to system (1.1), there exists the limit . In view of the above convention, we assume that .
Definition 2.1 A solution of (1.1) is said to be ω-anti-periodic if
where the smallest positive number ω is called the anti-period of function .
In what follows, we shall prove the lemmas which will be used to prove our main results in Section 3.
Lemma 2.1 Let ()-() hold. Suppose that is a solution of system (1.1) with initial conditions
where , . Then
Proof Assume that (2.5) does not hold. From (), we have
So, if , then . Thus, we may assume that there exist and such that
In view of (1.1), for , we obtain
Calculating the upper left derivative of , together with (2.6), (), () and
we obtain
It is a contradiction and shows that (2.5) holds. The proof is now completed. □
Remark 2.1 After conditions ()-(), the solution of system (1.1) always exists (see [1, 2]). In view of the boundedness of this solution, from the theory of impulsive differential equations in [1], it follows that the solution of system (1.1) can be defined on .
Lemma 2.2 Suppose that ()-() are true. Let be the solution of system (1.1) with initial value , and let be the solution of system (1.1) with initial value . Then there exists a positive constant λ such that
Proof Let . Then, for , it follows that
Define continuous functions by setting
Then
which, for , together with the continuity of , implies that we can choose sufficiently small λ satisfying and such that
Let
Then, for ,
and
We define a positive constant as follows:
Let K be a positive number such that
We claim that
Obviously, (2.13) holds for . We first prove that (2.13) is true for . Otherwise, there exist and such that one of the following two cases must occur.
Now, we consider two cases.
Case (i). If (2.14) holds. Then, from (2.9), (2.10) and ()-(), we have
Case (ii). If (2.15) holds. From (2.9), (2.10) and ()-(), using a similar method, we can obtain the contradiction. Therefore, (2.13) holds for . From (2.11) and (2.13), we know that
and
Thus, for , we may repeat the above procedure and obtain
Further, we have
That is,
□
Remark 2.2 If is an ω-anti-periodic solution of system (1.1), it follows from Lemma 2.2 that is globally exponentially stable.
3 Main results
In this section, we study the existence and exponential stability for an anti-periodic solution of system (1.1).
Theorem 3.1 Suppose that all conditions in Lemma 2.2 are satisfied. Then system (1.1) has exactly one ω-anti-periodic solution . Moreover, is globally exponentially stable.
Proof Let be a solution of system (1.1). By Remark 2.1, the solution can be defined for all . By hypothesis (), we have, for any natural number h and ,
Further, by hypothesis (), we obtain
Thus, for any natural number h, we obtain that is a solution of system (1.1) for all . Hence, is also a solution of (1.1) with initial values
Then, by the proof of Lemma 2.2, for , there exists a constant such that for any natural number h, we have
and
Moreover, for any natural number m, and , we can obtain
and
Combining (3.3)-(3.4) with (3.5)-(3.6), we know that converges uniformly to a piecewise continuous function on any compact set of R.
Now we are in a position to prove that is an ω-anti-periodic solution of system (1.1). It is easily known that is ω-anti-periodic since
and
where . Noting that the right-hand side of (1.1) is piecewise continuous, together with (3.1) and (3.2), we know that converges uniformly to a piecewise continuous function on any compact set of . Therefore, letting on both sides of (3.1) and (3.2), we get
Thus, is an ω-anti-periodic solution of system (1.1).
Finally, by Lemma 2.2, we can prove that is globally exponentially stable. This completes the proof. □
4 Example
In this section, we give an example to demonstrate the results obtained in previous sections.
Example 4.1 Consider the following IHHNNs consisting of two neurons with time-varying delays in the leakage terms:
Here, it is assumed that the activation functions
Note that
Then we obtain
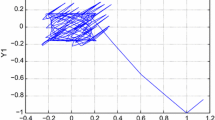
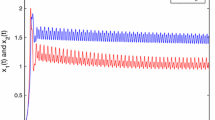
It follows that system (4.1) satisfies all the conditions in Theorem 3.1. Hence, system (4.1) has exactly one 1-anti-periodic solution. Moreover, the 1-anti-periodic solution is globally exponentially stable. The fact is verified by the numerical simulation in Figure 1.

Numerical solution of systems ( 4.1 ) for initial value , .
Remark 4.1 Since [9–16] only dealt with IHHNNs without leakage delays, one can observe that all the results in these works and the references therein cannot be applicable to prove the existence and exponential stability of 1-anti-periodic solution for IHHNNs (4.1). This implies that the results of this paper are essentially new.
Author’s contributions
The author has made this manuscript independently. The author read and approved the final version.
References
Lakshmikantham V, Bainov DD, Simeonov PS: Theory of Impulsive Differential Equations. World Scientific, Singapore; 1989.
Samoilenko AM, Perestyuk NA: Impulsive Differential Equations. World Scientific, Singapore; 1995.
Akhmet MU: On the general problem of stability for impulsive differential equations. J. Math. Anal. Appl. 2003, 288: 182–196. 10.1016/j.jmaa.2003.08.001
Giles CL, Maxwell T: Learning, invariance and generalization in high-order neural networks. Appl. Opt. 1987, 26: 4972–4978. 10.1364/AO.26.004972
Karayiannis NB: On the training and performance of higher-order neural networks. Math. Biosci. 1995, 129: 143–168. 10.1016/0025-5564(94)00057-7
Schmidt WAC, Davis JP: Pattern recognition properties of various feature spaces for higher order neural networks. IEEE Trans. Pattern Anal. Mach. Intell. 1993, 15: 795–801. 10.1109/34.236250
Reid, MB, Spirkovska, L, Ochoa, E: Rapid training of higher-order neural networks for invariant pattern recognition. In: Proc. Int. Joint Conf. Neural Networks, Washington, 1989
Zhang J, Gui Z: Existence and stability of periodic solutions of high-order Hopfield neural networks with impulses and delays. J. Comput. Appl. Math. 2009, 224: 602–613. 10.1016/j.cam.2008.05.042
Shi P, Dong L: Existence and exponential stability of anti-periodic solutions of Hopfield neural networks with impulses. Appl. Math. Comput. 2010, 216: 623–630. 10.1016/j.amc.2010.01.095
Guan Z, Chen G: On delayed impulsive Hopfield neural networks. Neural Netw. 1999, 12: 273–280. 10.1016/S0893-6080(98)00133-6
Zhang A: Existence and exponential stability of anti-periodic solutions for HCNNs with time-varying leakage delays. Adv. Differ. Equ. 2013., 2013: Article ID 162 10.1186/1687-1847-2013-162
Liu B, Gong S: Periodic solution for impulsive cellar neural networks with time-varying delays in the leakage terms. Abstr. Appl. Anal. 2013., 2013: Article ID 701087
Jiang Y, Yang B, Wang J, Shao C: Delay-dependent stability criterion for delayed Hopfield neural networks. Chaos Solitons Fractals 2009, 39: 2133–2137. 10.1016/j.chaos.2007.06.039
Xiao B, Meng H: Existence and exponential stability of positive almost periodic solutions for high-order Hopfield neural networks. Appl. Math. Model. 2009, 33: 532–542. 10.1016/j.apm.2007.11.027
Zhang F, Li Y: Almost periodic solutions for higher-order Hopfield neural networks without bounded activation functions. Electron. J. Differ. Equ. 2007, 99: 1–10.
Ou CX: Anti-periodic solutions for high-order Hopfield neural networks. Comput. Math. Appl. 2008, 56: 1838–1844. 10.1016/j.camwa.2008.04.029
Acknowledgements
I am grateful to the referees for their suggestions that improved the writing of the paper. This work was supported by the National Natural Science Foundation of China (grant no. 11201184), the Natural Scientific Research Fund of Zhejiang Provincial of P.R. China (grant no. LY12A01018), and the Natural Scientific Research Fund of Zhejiang Provincial Education Department of P.R. China (grant no. Z201122436).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The author declares that they have no competing interests.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
{kind=link}
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Wang, W. Anti-periodic solution for impulsive high-order Hopfield neural networks with time-varying delays in the leakage terms. Adv Differ Equ 2013, 273 (2013). https://doi.org/10.1186/1687-1847-2013-273
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2013-273