
Abstract
In this article, one kind of the dynamical system which has a near saddle point is investigated. An equivalent condition for the existence of intertwined attractors of the planar dynamical systems and the related results are given.
MSC:34C35, 54H20.
Similar content being viewed by others


1 Introduction
In the investigation of the stability of dynamical systems, one of very important topics is to determine the topological structure of the basin of attraction for an attractor (see [1–7] and [8]). For a nonlinear dynamical system, it is an interesting phenomenon to have intertwined attraction basins. It is a problem related to determine the geometrical structure of basins for variant attractors when the dynamical system happens to have multiple attractors. The investigations of basin boundary of attraction began by Birkhoff [1]. If it happens that different basins of attraction have mutual boundaries, the basin boundaries can be more complicated (see [9, 10]). In [11], the authors discuss the Wada property of basins of attraction. The lakes of Wada continuum can be a common basin boundary for three attracting fixed points. A more complex case is Handel’s construction in [12], which shows that extremely complicated sets (pseudocircle, a pathological set that is hereditarily indecomposable) can be the co-frontier of disjoint basins. Later, some examples with intermingled basins were established in [13] for discrete dynamical systems. As to a dynamical system given by a vector field, the situation could also be intricate. For example, in [14], the author gives a definition of intertwined basins of attractors. Then in [15], the authors introduce a new general definition of intertwined basins of attraction, and present the condition of existence of smoothly intertwined basins, and in this case, there exist inaccessible points on the basin boundary. Along the mutual boundary of intertwined basins, variant basins of attraction become narrower and narrower, meanwhile they intertwine together. So, to some extent, it leads to the sensitive dependence on initial conditions, which is the central assumption in the investigation of chaos. For the case of planar flows, the situation is simpler. Recently, several authors discussed the property of intertwined basins of attraction (see [5–7, 14, 15]). Those definitions of intertwined basins were used to characterize a kind of intertwined attractors. That is, a saddle point connecting two distinct attractors played an important role in occurrence of intertwined basins of attraction that they investigated. In the plane systems, the authors only studied the systems which had a saddle point O and two attractors and . To our best knowledge, we do not find the intertwining phenomenon of other dynamical systems that have been investigated. We shall introduce the definition of near saddle point, consider one kind of dynamical system which has a near saddle point, investigate the intertwining phenomenon of this kind of dynamical system, and give some conditions to guarantee the existence of intertwined attractors of the dynamical systems on the plane and get some related results. We give a plane graph to characterize the intertwining property of basins of attraction of the dynamical systems. The example in [5] is a special case of the dynamical system that we investigate.
The novelty of this paper is to study the intertwined attractor basins of the system which has a near saddle point connecting two distinct attractors. The rest of the paper is organized as follows. In Section 2, we fix some notations and definitions. In Section 3, we give the main results about intertwining phenomenon, and present an equivalent condition for existence of intertwined attractors of the dynamical systems.
2 Preliminaries
In this section, first of all, we recall some basic notions. Let X be a two-dimensional Euclidean space with a metric d, on which there is a flow defined by the vector field
Where is continuous, and assume that solutions of arbitrary initial value problems are unique. For and , we denote for brevity, in particular, . A set A is invariant under the flow π if holds. In particular, for a point , the orbit pR is an invariant set. Throughout the paper for , and ∂A denote the closure and boundary of A, respectively. The set denotes a ball with p the center and r the radius. A space M is locally arcwise connected at a point if for any neighborhood U of x, there exists an arcwise connected open set V such that , and M is locally arcwise connected if it is locally arcwise connected at each point in M. Recall that each component of an open set in a locally arcwise connected space is open. In the literature, several different concepts of an attractor and related definitions are used by different authors. To avoid confusion, here we fix the following definition.
Definition 2.1 The ω-limit set (or positive limit set ) of p (or of the orbit pR) is defined to be the set , equivalently means that there is a sequence with such that as .
Similarly, we define the α-limit set (or negative limit set ) of p by reversing the direction of time.
Definition 2.2 If A (⊂X) is an attractor, its basin of attraction is defined to be the set of initial points p such that , i.e., (), where , d is the ordinary metric on the space X, and, with no confusion, we also use it for the distance between a point and a set.
From the definition of the basin of attraction , it can be shown that the basin is an open set (see [[16], Chapter 5]).
Definition 2.3 The point p is said to be a near saddle point if there exist at least two orbits xt and yt, whose negative limit sets and are the single point set , beside the curve , there respectively exist at least two orbits , , , whose positive limit sets and also are .
Figure 1 is a phase portrait of a near saddle point p.

The portrait of a near saddle point p .
Remark 2.1 If there only exist orbits and beside the curve , then the point P becomes a saddle point.
To end this section, we give the general definition of intertwined basins of attractors, which is presented in [15] and used to prove our main result.
Definition 2.4 Let B be an open subset of X, a point is accessible from B, provided that there is an arc ς in with an end p such that , otherwise, is inaccessible from B.
Remark Easy examples show that the local disconnectedness of B at does not imply that p is inaccessible from B, e.g., B is the region surrounded by the Warsaw circle. Conversely, if p is inaccessible from B, then has an infinite number of components for a small .
Definition 2.5 Let () be pairwise disjoint open sets in X. We say that has an intertwining property at a point , provided:
-
(1)
p is inaccessible from ;
-
(2)
for each arc ς in from p to a point for some , then holds for every .
Remark 2.2 We note that from the definition above, beside p, the basins and approach to p alternately, meanwhile they become narrower and narrower. By the continuity of dependence on initial conditions, we can say that the basins and intertwine together beside p. In [5, 6, 14] and [15], the existence of a saddle point with its two branches of unstable manifold approaching different attractors plays an essential role in occurrence of intertwined basins of attraction. In the next section, we study the phenomenon of intertwining attractors of a new kind of dynamical system.
3 Main results
To be simpler, in this section, we consider that the flow π defined by system (2.1) has a near saddle point O and two attractors and , where and need not be equilibria in system (2.1). Let and be respectively the basins of and , . Denote by and the orbits whose negative limit sets also are the single point set besides the orbits whose positive limit sets also are the single point set and the set O, respectively. For example, in Figure 1, the orbits and , . Similarly, and respectively denote the orbits whose positive limit sets also are the single point set besides and and the set O such that the orbits xt and yt in Figure 1.
Theorem 3.1 Assume that system (2.1) has a near saddle point O, and , . Then system (2.1) has the intertwining property if the α-limit set of (or ) is at least two common points.
Proof First of all, let denote the one-point compactification of X. Then we extend the dynamical system π on X to a dynamical system on , where is given by for , , and for all . Hence the negative limit set of is a compact and connected set in X from Theorem 3.6 in [16]. By assumptions, the α-limit set of is at least two common points. So contains uncountable points. By the connectedness of α-limit set , there is a connected component containing uncountable points in . Furthermore, there at least exists an arc S connecting two points in this connected component. Otherwise, if we arbitrarily choose two distinct points and in the connected component, there exists a δ (>0, sufficiently small) such that and are relatively compact sets, that is, is compact, and there is no point of on and , which respectively are the boundaries of and . Since and in , there exist sequences and such that and . Now, choose a sequence () such that in . By the compactness of , is compact, so has a convergence subsequence whose convergence point in . That is, there exists a point in , which is a contradiction. Hence there exists an arc S containing in some connected component of , and . Now, we arbitrarily choose one arc ς with one end point and the other end point (). Hence by the continuous dependence on initial conditions, we can assert that all the orbits cross ς in the same direction beside the point p when ς is sufficiently small. Then the negative semi-orbit crosses ς successively at with ( as ) and tends monotonously to p along ς (see [[10], Chapter 7]). Since p is in the common limit set of , there exists a point such that , negative semi-orbit crosses ς successively at with ( as ) and tends monotonously to p along ς. Thus it follows that (1) in Definition 2.5 is true. On the other hand, obviously, one branch of the set lies in , and the other in . Thus and are respectively open neighborhoods of two branches of . For any , crosses for . Choose , on two boundaries of with . Let where is the first time that crosses , . Consider the diffeomorphism . By the inclination lemma in [2], it is easy to see that both and hold for a sufficiently large n. Hence we obtain that and . Thus it follows that (2) in Definition 2.5 is true, so we are done. Theorem 3.1 is completed. □
Remark 3.1 In applications of Theorem 3.1 above, we need to determine the location of the set . From the proof of Theorem 3.1, may be either bounded or unbounded, and also may have equilibria (see [4]). Of course, can be a closed orbit in [6].
Theorem 3.2 Assume that system (2.1) has a near saddle point O, , . There exist no equilibria in if system (2.1) has the intertwining property if and only if the α-limit set of (or ) is at least two common points.
Proof From Theorem 3.1, the sufficiency is shown. For the necessity, similarly to the proof of Theorem 3 in [15], we have the α-limit set of or is at least two common points. In fact, if system (2.1) has the intertwining property at the point p, which is a regular point since there exist no equilibria in , then the orbit pR is contained in . Hence the α-limit set of (or ) is at least two common points. The theorem is completed. □
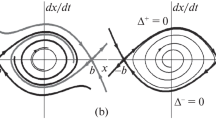
Figure 2 is a phase portrait of a planar system satisfying the conditions of Theorem 3.2. Clearly, there exist two attractors and , which are asymptotically stable equilibria. Their basins and are separated by the stable manifold of the saddle point O. The periodic orbit L also lies in the common boundary of those basins, and each point in L is inaccessible from and . Hence, by Definition 2.5, and are intertwined basins of attraction.

The phase portrait of an intertwined attractor.
References
Birkhoff G: Sur quelques courbes fermées remarquable. Bull. Soc. Math. Fr. 1932, 60: 1–26.
Palis J, de Melo W: Geometric Theory of Dynamical Systems: An Introduction. Springer, New York; 1982.
Dugundji J: Topology. Allyn & Bacon, Boston; 1966.
Hartman P: Ordinary Differential Equations. 2nd edition. Birkhäuser, Boston; 1985.
Ding C: Intertwined basins of attraction for flows on a smooth manifold. Publ. Math. (Debr.) 2005, 67: 1–7.
Ding C: Intertwined basins of attraction generated by the stable manifold of a saddle point. Appl. Math. Comput. 2004, 153: 779–783. 10.1016/S0096-3003(03)00675-1
Li G, Ding C, Chen M: Intertwined basins of attraction of dynamical systems. Appl. Math. Comput. 2009, 148: 101–120.
Ding C: Intertwined basins of attraction. Int. J. Bifurc. Chaos 2012, 22: 930–934.
Grebogi C, Ott E, Yorke J: Basin boundary metamorphoses: changes in accessible boundary orbits. Physica D 1987, 24: 243–262. 10.1016/0167-2789(87)90078-9
McDonald S, Grebogi C, Ott E, Yorke J: Fractal basin boundaries. Physica D 1985, 17: 125–153. 10.1016/0167-2789(85)90001-6
Kennedy J, Yorke J: Basins of Wada. Physica D 1991, 51: 213–225. 10.1016/0167-2789(91)90234-Z
Handel M:A pathological area preserving diffeomorphism of the plane. Proc. Am. Math. Soc. 1982, 86: 163–168.
Alexander J, Hunt B, Kan I, Yorke J: Intermingled basins for the triangle map. Ergod. Theory Dyn. Syst. 1996, 16: 651–662.
Ding C: On the intertwined basins of attraction for planar flows. Appl. Math. Comput. 2004, 148: 801–805. 10.1016/S0096-3003(02)00937-2
Ding C: Intertwined basins of attraction in planar systems. Int. J. Bifurc. Chaos 2009, 19: 2377–2381. 10.1142/S0218127409024141
Bhatia NP, Szego G: Stability Theory of Dynamical Systems. Springer, Berlin; 1970.
Acknowledgements
The authors wish to thank the anonymous referee for his/her valuable suggestions to this paper. This work was supported by the National Natural Science Foundation of China under Grant 61201430, the China Postdoctoral Science Foundation and Shandong Province Postdoctoral Innovation Foundation.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
GL performed all the steps of proof in this research and also wrote the paper. MC suggested many good ideas that made this paper possible and helped to draft the first manuscript. All authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
{kind=link}
{kind=link}
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Li, G., Chen, M. Intertwined phenomenon of a kind of dynamical systems. Adv Differ Equ 2013, 265 (2013). https://doi.org/10.1186/1687-1847-2013-265
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2013-265