
Abstract
Background
Light Detection and Ranging (LiDAR) is an established technology that has been shown to provide accurate information on individual-tree and stand-level forest structure. Although LiDAR has been widely used to describe stand structural dimensions the utility of this technology to predict spatial variation in wood quality traits is largely unexplored. This study used LiDAR metrics to predict spatial variation in total stem volume (TSV) and outerwood stress-wave velocity (V) in an even-aged mature forest (25 yrs) of moderate size (stocked area of 217.8 ha). Outerwood stress-wave velocity is a good predictor of modulus of elasticity which is a key performance criterion for structural timber.
Methods
Linear and non-linear models were developed to predict TSV and V. Models of TSV were developed from the full dataset that included 163 plots while models of V were developed from a subset of 32 plots in which V had been measured.
Results
The best statistical models that included only LiDAR data, explained 60% and 37% of the variation in TSV and V, respectively. Addition of measured stand density to both models significantly improved the R2 to, respectively, 0.76 and 0.70 for TSV and V. The root-mean square error for the final models of TSV and V were, respectively, 64.0 m3 ha-1 and 0.086 km s-1.
Conclusion
At the forest level LiDAR metrics were found to be useful for predicting both V and TSV. Further research should examine the link between LiDAR metrics and V across broader ranges of V to confirm these findings.
Similar content being viewed by others

Background
Light Detection and Ranging (LiDAR) is an established technology that provides a highly accurate measure of distance. Often mounted on an airborne system, the application of LiDAR for aerial laser scanning has been studied in forestry since about 1978. However, it is only in recent years that the combination of precise airborne navigation, high quality instruments and effective post-processing software has allowed the technology to progress to operational use (Naesset, 1997, 2002). Innovation in laser scanning technology is advancing very rapidly and there are several benchmark papers that describe the technology and review sensor characteristics (Baltsavias, 1999 ; Hyyppa et al., 2006; Wehr & Lohr, 1999).
Internationally, LiDAR data have been used within the forest sector to provide estimates of stand height, basal area (Means et al., 1999; Watt, 2005), stem diameter, stem volume (Lim et al., 2003; Lim & Treitz, 2004; Naesset, 1997; Woods et al., 2008; Woods et al., 2011) canopy properties (Naesset & Okland, 2002) and species composition (Donoghue et al., 2007). For estimation of tree height and volume the accuracy of LiDAR-derived estimates is reported to be similar to or better than manual field measurement methods (Naesset, 2002; Watt, 2005). LiDAR data are used operationally in, for example, the Nordic countries, to provide estimates of stand dimensions at the compartment level (Eid et al., 2004). However, in the southern hemisphere, where Pinus radiata D.Don is the most widely planted conifer species (Lewis & Ferguson, 1993), little published research has demonstrated the utility of this technology in predicting stand volume at the forest level.
Given the known correlation between stand structural attributes and internal wood properties in a range of conifers (van Leeuwen et al., 2011; Watt & Zoric, 2010) there is a theoretical basis linking LiDAR metrics to wood properties. Despite this, very little research has demonstrated useful relationships between LiDAR and wood quality traits (Hilker et al., in press; van Leeuwen et al., 2011). In plantation-grown softwoods, such as P. radiata, modulus of elasticity (E) is an important wood property that describes resistance of timber to deformation under load. Although E is not an important property for pulp, it is a key performance criterion for structural timber. In standing trees E is most commonly estimated by portable instruments that determine stress-wave velocity (V) in outerwood using time of flight methods (Lindström et al., 2002).
Using spatially coincident LiDAR and inventory data obtained from a P. radiata forest located within New Zealand, the objective of this research was to construct models between LiDAR metrics and both total stem volume (TSV) and outerwood velocity (V).
Methods
Data collection
Stand information
The data for this study were obtained during late summer 2011 from a 25-year-old forest located in Eastern Bay of Plenty, New Zealand. This forest is located on steep dissected country with an elevation range of approximately 150 to 300 metres above sea level. A standard pre-harvest inventory comprising 163 plots was carried out within the forested area of 217.8 hectares. The circular plots were laid out on a systematic grid. Plot size was varied from 0.06 to 0.09 ha to ensure that approximately 20 trees were included in each plot. The location of the plots was measured using a Trimble Pathfinder Pro XT high grade GPS with data corrected using post processing (accuracy = 0.5m). Within each plot all trees were measured for stem diameter.
Total stem volume, TSV (m3 ha-1), was determined from stand basal area, BA (m2 ha-1), and mean top height, Ht, (m; mean height of the 100 largest diameter trees per ha), using the following nationally applicable equation (Kimberley & Beets, 2007),
For Equation 1, Ht was determined directly from LiDAR metrics using the following unbiased and accurate (R2=0.95; root mean square error = 1.91 m) nationally applicable equation, derived from an extensive set of LiDAR metrics and field measurements (Watt & Watt, in press),
where H95 (m) is the 95th percentile of the LiDAR height distribution. Stem slenderness was defined from the plot data as Ht/mean stem diameter. For each plot stand density was determined as the actual number of trees ha-1.
Outerwood velocity
Outerwood stress-wave velocity (V) was measured in 32 of the inventory plots. Plots were selected to cover the range in stem slenderness and stand density present throughout the forest as both factors are significant determinants of V (Lasserre et al., 2008; Waghorn et al., 2007; Watt & Zoric, 2010). Where possible, measurements were taken from at least 20 trees within the plot.
Velocity measurements, centred about breast height (1.4 m), were taken using the ST300 tool (Fibre-gen, New Zealand). Using paths that avoided any large branch stubs or obvious malformations, two measurements were taken either side of the stem (ca. 180° apart) and averaged. The path length between transmitter probe and receiver probe sensors was approximately 1 m.
LiDAR dataset
Light detection and ranging data and aerial imagery were collected by New Zealand Aerial Mapping, who flew over the site between 24 May and 1 June 2011. Data were captured using New Zealand Aerial Mapping’s Optech ALTM 3100EA LiDAR system (05SEN178) and Trimble AIC medium-format digital camera. The LiDAR data were collected at a minimum of 2 points m-2 on open ground. The raw LiDAR data was processed by the supplier into LAS format and georeferenced into the New Zealand Transverse Mercator (NZTM) coordinate system. Classified ground returns were used to construct a Digital Terrain Model (DTM) by connecting them into a Triangulated Irregular Network (TIN) followed by linear interpolation onto a regular grid. All returns within 0.5 m of the ground were eliminated to remove the effects of understorey vegetation. LiDAR metrics used in the modelling were extracted above the circular plots using corrected GPS locations with the ClipData and CloudMetrics tools from the Fusion software (McGaughey & Carson, 2003).
Predictive variables used for the modelling
The LiDAR metrics used in the modelling consisted of height percentiles (H5 – H95), the mean (Hmean) and maximum height (Hmax), several metrics describing the LiDAR height distribution through the canopy (skewness, coefficient of variation, standard deviation (Hsd), kurtosis) and measures of canopy density such as the percentage of returns reaching within 0.5 m of the ground (PCzero) and the percentage of first returns above 0.5 m (PCveg).
Variables describing site topography and stand structure were also used in the modelling. These variables included aspect, slope, stand density, stem slenderness, basal area, mean diameter and Ht. Aspect was determined using a digital terrain model while slope was measured in the field.
Analysis
Linear and non-linear models to predict TSV and V were developed using PROC GLM and PROC NLIN in SAS (SAS-Institute-Inc, 2000). Variables were introduced sequentially into each model starting with the variable that exhibited the strongest correlation, until further additions were either not significant or did not markedly improve model precision (R2 gains of < 5%). Variable selection was undertaken manually, one variable at a time, and plots of residuals were examined prior to variable addition to ensure that the variable was included in the model using the least biased functional form.
Model precision was determined using the coefficient of determination (R2) and the root mean square error (RMSE). Model bias was determined through plotting predicted against measured values. Residual values (measured – predicted values) were plotted against predicted values, all independent variables in the model and key variables not included in the models. The contribution and functional form of each variable in both of the final models were examined through partial response functions. These partial response functions were generated across the range of each variable whilst holding other variables at mean values in the dataset.
Results
Data ranges
Mean values for TSV and V were, respectively, 594.5 m3 ha-1 and 4.31 km s-1, with respective ranges of 296–908 m3 ha-1 and 3.79-4.52 km s-1. Ranges for stand dimensions, LiDAR metrics and topographical variables were similar between the full dataset and that used to determine V (Table 1). In the full dataset, stem slenderness and stem diameter ranged two-fold while basal area varied three-fold. Mean top height, as estimated by LiDAR, ranged from 27.1-41.4 m. Slope varied five-fold and almost the complete range of aspects were included in the dataset. There was a relatively wide range in LiDAR metrics with the 30th LiDAR height percentile (H30) showing greatest variation from 5.7 to 25.5 m.
Bivariate correlations
Both TSV and V were significantly correlated to stand density, mean top height and stem diameter (Table 1). There was also a moderate correlation between V and slenderness that had an R2 of 0.56 when a second order polynomial function, with curvilinearity, was used to characterise the relationship. With the exception of the significant relationship between slope and V, none of the topographical variables were significantly related to either V or TSV (at P=0.05). Of the LiDAR metrics considered, TSV was most strongly related to H30, while the standard deviation of height (Hsd) was the strongest predictor of V (Table 1).
Total stem volume
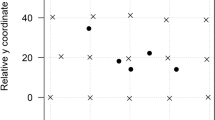
The 30th LiDAR height percentile (H30) accounted for 60% of the variation in TSV (Figure 1), with RMSE of 82.3 m3 ha-1, using the following highly significant (P<0.0001) linear equation,

Relationship between the LiDAR 30thheight percentile ( H 30 ) and total stem volume ( TSV ). The following linear line has been fitted to the data: TSV = 150.49 + 26.26H30.
The best model of TSV included only H30 and stand density (S) obtained from the ground plots, in the following equation,
The overall model was highly significant (P<0.0001) as were the two variables included in the model (P<0.0001). The model accounted for 76% of the variation in TSV and had a RMSE of 64.0 m3 ha-1. A plot of predicted against actual TSV showed the model to be relatively unbiased (Figure 2). Partial response functions showing the change in TSV with changes in both variables show the model to be more sensitive to H30 than S (Figure 3). Model residuals of TSV were normally distributed (Shapiro-Wilk P > 0.05) and exhibited little correlation with either the variables in the model or those that were excluded from the model (data not shown).

Relationship between total stem volume and values predicted by Equation ( 4 ). For reference the 1:1 line is shown as a dashed line.

Partial response functions showing changes in total stem volume with variation across the range in (a) LiDAR 30 th height percentile and (b) stand density.
Outerwood velocity
The best predictive model of V (using only LiDAR variables as possible components) included the standard deviation in LiDAR heights (Hsd) and the percentage of first returns from the vegetation (PCveg). The model had an R2 of 0.37, RMSE of 0.12 km s-1, and was described by,
The overall model was significant (P=0.0013) as was Hsd (P<0.0001). Although PCveg was marginally insignificant (P=0.11), this variable was retained as it was a useful predictor in the more complex model outlined below. With the exception of one outlier, a plot of model predictions against actual velocity showed little apparent bias (data not shown).
Using all available variables the best predictive model of V included Hsd, PCveg and stand density (S) in the following formulation,
The overall model was significant as were all variables (P<0.05). The model accounted for 70% of the variance in V, with RMSE of 0.086 km s-1. A plot of predictions against actual velocity was relatively unbiased (Figure 4), although there was one outlier with a low V (Figure 4). Removal of the outlier had little effect on the precision of the model with the R2 reduced from 0.70 to 0.69. Residuals from the final model were normally distributed (Shapiro-Wilk P > 0.05) and showed little pattern when plotted against any of the variables in the model or any of the key variables not included within the model (e.g. slope, aspect).

Relationship between actual velocity and values predicted using Equation ( 6 ). For reference the 1:1 line is shown as a dashed line.
Partial response functions show linear relationships between V and all variables apart from stand density. For stand density, there was an exponential increase in V that approached a threshold at stand densities exceeding 400 stems ha-1 (Figure 5).

Partial response functions showing changes in outerwood stem velocity with variation across the range in (a) standard deviation of elevation, (b) percentage of first returns from the vegetation (above 0.5 m) and (c) stand density.
Discussion
This study showed LiDAR metrics to be significantly related to both TSV and V. Inclusion of stand density into these two regression models greatly improved the predictive power of these relationships, highlighting how knowledge of stand density can be useful at both the intra and inter stand level. Little research has demonstrated a link between LiDAR metrics and wood quality attributes such as V and further studies should be undertaken to explore the generality of this relationship.
The variables included in the final model of V are likely to be significant predictors of V as they are significantly related to stem slenderness. As found here, stem slenderness has previously been identified as one of the key drivers of V and modulus of elasticity (Watt et al., 2009; Watt & Zoric, 2010). Both standard deviation of height (Hsd) and stand density exhibited highly significant (P<0.001) positive relationships with stem slenderness.
There is a biological basis for the relationships between stem slenderness and both Hsd and stand density. Hsd describes variation in LiDAR heights in the canopy and provides a measure of stand porosity (the ratio or percentage of pore space to the space occupied by tree stems, branches, twigs and leaves). It has a strong correlation with upper LiDAR metrics, reflecting increases in stem slenderness as the stand height increases. The positive relationship between stand density and slenderness, found here, has been well described previously for light demanding conifers such as P. radiata (Watt & Kirschbaum, in press) and results from greater height extension than diameter growth in response to increasing competition for light. Although the percentage of first returns from vegetation (PCveg) was not significantly related to slenderness (P= 0.28) this variable was retained in the final model of V as there was a clear relationship between PCveg and V.
Predictive power of the best TSV model shown here was within the range cited by previous localised studies where coefficient of determinations varied from 0.46 (Naesset, 1997) to 0.97 (Means et al., 2000). The relatively high coefficient of determination found here partially reflects a wide range in the dependant variable (TSV) that tends to inflate the percentage of variance explained. As RMSE is not subject to the same limitation, this statistic provides a more conservative estimate of precision. When compared to previous research the RMSE for the best model of 64.0 m3 ha-1 found here is within the mid-range of previous values that include 28 m3 ha-1 (Naesset, 1997, 2002; van Aart et al., 2006), 18.3 – 31.9 m3 ha-1 (Holmgren & Jonsson, 2004), 38.0 – 56.7 m3 ha-1 (Naesset, 2002), 26.1 – 82.8 m3 ha-1 (van Aart et al., 2006) and 73 m3 ha-1 (Means et al., 2000).
The variables included in the final models were consistent with previous research and have sound mechanistic basis. Logically, LiDAR models describing TSV should combine stem height with variables that provide a measure of stand density and stem diameter. The stem height variable used, H30, was appropriate as is affected by the point cloud of almost all trees of significant size, as opposed to top-end height percentiles (e.g. H95) that are only altered by the point clouds of the highest trees. Inclusion of stand density determined from plot measurements was found to be superior to the use of LiDAR metrics that approximate this quantity (e.g. PCveg).
Stand density could be included as a driving variable at a range of resolutions. At a coarse level, stand density for the compartment could be used as input to the model. Alternatively tree counting software such as TiMBRs could be used to identify tree locations (Culvenor et al., 1998; Culvenor, 2002) which could then be used to estimate local stand density above each ground plot and over the whole stand using an appropriate grid size.
Conclusions
In conclusion, LiDAR metrics were found to be of considerable use for predicting V and TSV at the forest level. The most precise models of V and TSV included stand density as a predictive variable. Little research has demonstrated a link between LiDAR metrics and wood quality metrics such as V. Given that V is an important determinant of structural grade timber value further research into the link between LiDAR metrics and V would be warranted.
References
Baltsavias EP: Airborne laser scanning: basic relations and formulas. Isprs Journal of Photogrammetry and Remote Sensing 1999,54(2–3):199–214.
Culvenor DS, Coops NC, Preston R, Tolhurst K: A spatial clustering approach to automated crown delineation. In Automated interpretation of high spatial resolution digital imagery for forestry. Edited by: Hill DA, Leckie DG. British Columbia: Victoria; 1998:67–80.
Culvenor DS: TIDA: An algorithm for the delineation of tree crowns in high spatial resolution remotely sensed imagery. Computer & Geosciences 2002, 28: 33–44. 10.1016/S0098-3004(00)00110-2
Donoghue DNM, Watt PJ, Cox NJ, Wilson J: Remote sensing of species mixtures in conifer plantations using LiDAR height and intensity data. Remote Sensing Environment 2007, 110: 509–522. 10.1016/j.rse.2007.02.032
Eid T, Gobakken T, Naesset E: Comparing stand inventories for large areas based on photo-interpretation and laser scanning by means of cost-plus-loss analyses. Scandinavian Journal of Forest Research 2004,19(6):512–523. 10.1080/02827580410019463
Hilker T, Frazer GW, Coops NC, WUlder GJ, Newnham JD, Stewart M, van Leeuwen M, Culvernor DS: Prediction of Wood Fiber Attributes from LiDAR-Derived Forest Canopy Indicators. Forest Science in press
Holmgren G, Jonsson T: Large scale airborne laser scanning of forest resources in Sweden. International Archives of photogrammetry, remote sensing and spatial information sciences XXXV1 - 8/W2 2004.
Hyyppa J, Hyyppa H, Leckie D, Gougeon F, Yu X, Maltamo M: Review of methods of small-footprint airborne laser scanning for extracting forest inventory data in boreal forests. International Journal Of Remote Sensing 2006, 29: 1339–1366.
Kimberley MO, Beets PN: National volume function for estimating total stem volume of Pinus radiata stands in New Zealand. New Zealand Journal of Forestry Science 2007, 37: 355–371.
Lasserre JP, Mason EG, Watt MS: Influence of the main and interactive effects of site, stand stocking and clone on Pinus radiata D. Don corewood modulus of elasticity. Forest Ecology and Management 2008,255(8–9):3455–3459.
Lewis NB, Ferguson IS: Management of radiata pine. Melbourne: Inkata Press; 1993.
Lim K, Treitz P, Baldwin K, Morrison I, Green J: LiDAR remote sensing of biophysical properties of tolerant northern hardwood forests. Canadian Journal of Remote Sensing 2003, 29: 658–678. 10.5589/m03-025
Lim K, Treitz P: Estimation of aboveground forest biomass from airborne discrete return laser scanner data using canopy based quantile estimators. Scandinavian Journal of Forest Research 2004, 19: 558–570. 10.1080/02827580410019490
Lindström H, Harris P, Nakada R: Methods for measuring stiffness of young trees. Holz als Roh und Werkstoff 2002, 60: 165–174. 10.1007/s00107-002-0292-2
McGaughey RJ, Carson WW: Fusing LIDAR data, photographs, and other data using 2D and 3D visualization techniques. In: Proceedings of Terrain Data: Applications and Visualization - Making the Connection; October 28–30, 2003. Charleston, South Carolina: Bethesda, MD: American Society for Photogrammetry and Remote Sensing; 2003:16–24.
Means JE, Acker SA, Harding DJ, Blair JB, Lefsky MA, Cohen WB, Harmon ME, McKee WA, et al.: Use of large-footprint scanning airborne LiDAR to estimate forest stand characteristics in the Western Cascades of Oregon. Remote Sensing of Environment 1999,67(3):298–308. 10.1016/S0034-4257(98)00091-1
Means JE, Acker SA, Fitt BJ, Renslow M, Emerson L, Hendrix CJ, et al.: Predicting forest stand characteristics with airborne scanning LiDAR. Photogrammetric Engineering and Remote Sensing 2000,66(11):1367–1371.
Naesset E: Estimating timber volume of forest stands using airborne laser scanner data. Remote Sensing of Environment 1997,61(2):246–253. 10.1016/S0034-4257(97)00041-2
Naesset E: Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sensing of Environment 2002,80(1):88–99. 10.1016/S0034-4257(01)00290-5
Naesset E, Okland T: Estimating tree height and tree crown properties using airborne scanning laser in a boreal nature reserve. Remote Sensing of Environment 2002,79(1):105–115. 10.1016/S0034-4257(01)00243-7
SAS-Institute-Inc: SAS/STAT User's Guide: Version 8. Volumes 1,2 and 3. Cary, North Carolina: SAS Institute Inc; 2000:3884.
van Aart JAN, Wynne RH, Oderwald R: Forest volume and biomass estimation using small-footprint Lidar-distributional parameters on a per-segment basis. Forest Science 2006, 52: 636–649.
van Leeuwen M, Hilker T, Coops NC, Frazer G, Wulder MA, Newnham GJ, Culvenor DS, et al.: Assessment of standing wood and fiber quality using ground and airborne laser scanning: A review. Forest Ecology and Management 2011,261(9):1467–1478. 10.1016/j.foreco.2011.01.032
Waghorn MJ, Watt MS, Mason EG: Influence of tree morphology, genetics, and initial stand density on outerwood modulus of elasticity of 17-year-old Pinus radiata. Forest Ecology and Management 2007, 244: 86–92. 10.1016/j.foreco.2007.03.057
Watt MS, Clinton PC, Parfitt RL, Ross C, Coker G: Modelling the influence of site and weed competition on juvenile modulus of elasticity in Pinus radiata across broad environmental gradients. Forest Ecology and Management 2009,258(7):1479–1488. 10.1016/j.foreco.2009.07.003
Watt PJ, Watt MS: Development of a national model of tree volume from LiDAR metrics for New Zealand. International Journal Of Remote Sensing in press
Watt MS, Zoric B: Development of a model describing modulus of elasticity across environmental and stand density gradients in plantation-grown Pinus radiata within New Zealand. Canadian Journal of Forest Research-Revue Canadienne De Recherche Forestiere 2010,40(8):1558–1566. 10.1139/X10-103
Watt MS, Kirschbaum MUF: Moving beyond simple linear allometric relationships between tree height and diameter. Ecological Modelling 2011, 222: 3910–3916. 10.1016/j.ecolmodel.2011.10.011
Watt PJ: An evaluation of LiDAR and optical satellite data for the measurement of structural attributes in British upland conifer plantation forestry. Doctoral thesis. England: Department of Geography, University of Durham; 2005.
Wehr A, Lohr U: Airborne laser scanning - an introduction and overview. Isprs Journal Of Photogrammetry And Remote Sensing 1999,54(2–3):68–82.
Woods M, Lim K, Treitz P: Predicting forest stand variables from LiDAR data in the Great Lakes - St. Lawrence forest of Ontario. Forestry Chronicle 2008,84(6):827–839.
Woods M, Pitt D, Penner M, Lim K, Nesbitt D, Etheridge D, Treitz P, et al.: Operational implementation of a LiDAR inventory in Boreal Ontario. Forestry Chronicle 2011,87(4):512–528.
Acknowledgements
This project was funded within the Intensive Forest Systems project of Future Forests Research Ltd. We thank PF Olsen for provision of the LiDAR dataset.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
MSW was the primary author and undertook the analysis. TA undertook the data extraction. HM organised the fieldwork. DP was involved with the planning of the study, data extraction and assisted with interpretation of results. JL was the senior technician involved in data collection. DC was involved in all aspects of the planning and execution of the study and was the key industry contact. PW provided input around planning, writing and interpretation of results. All authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Watt, M.S., Adams, T., Marshall, H. et al. Modelling variation in Pinus radiata stem volume and outerwood stress-wave velocity from LiDAR metrics. N.Z. j. of For. Sci. 43, 1 (2013). https://doi.org/10.1186/1179-5395-43-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1179-5395-43-1