
Abstract
The purpose of this paper is to introduce a new three step iteration scheme for approximation of fixed points of the nonexpansive mappings. We show that our iteration process is faster than all of the Picard, the Mann, the Agarwal et al., and the Abbas et al. iteration processes. We support our analytic proof by a numerical example in which we approximate the fixed point by a computer using Matlab program. We also prove some weak convergence and strong convergence theorems for the nonexpansive mappings.
MSC:47H09, 47H10.
Similar content being viewed by others

1 Introduction
Many nonlinear equations are naturally formulated as fixed point problems,
where T, the fixed point mapping, may be nonlinear. A solution of the problem (1.1) is called a fixed point of the mapping T. Consider a fixed point iteration, which is given by
The iterative method (1.2) is also called a Richardson iteration, a Picard iteration, or the method of successive substitution. The standard result for a fixed point iteration is the contraction mapping theorem. Indeed, the contraction mapping theorem holds on an arbitrary complete metric space; that is, if E is a complete metric space with metric d and such that for some and all , then T has a unique fixed point and the iterates (1.2) converge to the fixed point . The Picard iteration has been successfully employed in approximating the fixed point of contraction mappings and its variants. This success, however, has not extended to nonexpansive mappings T even when the existence of a fixed point of T is known. Consider the simple example of a self mapping in defined by for . Then T is a nonexpansive mapping with a unique fixed point at . If one chooses as a starting value , , then the successive iterations of T yield the sequence . Thus when a fixed point of nonexpansive mappings exists, other approximation techniques are needed to approximate it.
Consider an average mapping of the form , where I is the identity operator. This average mapping is nonexpansive because T is nonexpansive, and both have the same fixed point set. Krasnosel’skii [1] was first to notice the regularization effect of this average mapping. Schaefer [2] proved a convergence result for a general (). An approximation of fixed points of a nonexpansive mapping using Mann’s algorithm [3] has extensively been studied in the literature (see, e.g., [4, 5] and references therein). Mann’s algorithm generates, for an arbitrary , a sequence according to the following:
where is a real control sequence in the interval .
In 1974, Ishikawa [6] introduced an iteration process where is defined iteratively for each positive integer by
In 2000, Noor [7] introduced the following iterative scheme: for any fixed , construct by
for all , where , , and are sequences in .
In 2007, Agarwal et al. [8] introduced the following iteration process: for an arbitrary construct a sequence by
where and are in . They showed that this process converges at a rate that is the same as that of the Picard iteration and faster than the Mann iteration for contractions.
Recently, Abbas and Nazir [9] introduced the following iteration: for an arbitrary construct by
where , , and are in . They showed that this process converges faster than the Agarwal et al. [8] iteration process.
Motivated and inspired by the above work, in this paper we introduce a new iterative scheme, where the sequence is generated from arbitrary by
where , , and are real sequences in .
The purpose of this paper is to prove that our process (1.8) converges faster than all of the Picard, the Mann, the Ishikawa, the Noor, the Agarwal et al., and the Abbas et al. iteration processes for contractions in the sense of Berinde [10]. We also prove weak and strong convergence theorems for nonexpansive mapping using iteration (1.8). In the last section, using a numerical example, we compare the behavior of iteration (1.8) with respect to the above mentioned iteration processes.
2 Rate of convergence
Berinde [10] proposed a method to compare the fastness of two sequences.
Definition 2.1 Let and be two sequences of real numbers that converge to a and b, respectively, and assume that there exists
-
(i)
If , then it can be said that converges faster to a than to b.
-
(ii)
If , then it can be said that and have the same rate of convergence.
Suppose that, for two fixed point iteration procedures and , both converging to the same fixed point p, the error estimates
are available, where and are sequences of positive numbers (converging to zero).
Then, in view of Definition 2.1, Berinde [10] adopted the following concept.
Definition 2.2 Let and be two fixed point iteration procedures that converge to the same fixed point p and satisfy (2.2) and (2.3), respectively. If converges faster than , then it can be said that converges faster than to p.
In recent years, Definition 2.2 has been used as a standard tool to compare the fastness of two fixed point iterations. Using this technique Sahu [11] established that the Agarwal et al. iteration (1.6) converges faster than the Mann (1.3) and the Picard (1.2) iterations and supported the claim by the following example.
Example 1 Let and . Let be a mapping defined by for all . For and , , Agarwal et al. iteration is faster than both the Mann and the Picard iteration.
Using a similar technique Abbas and Nazir [9] established that the Abbas et al. iteration (1.7) converges faster than the Agarwal et al. iteration (1.6) and hence it converges faster than the Mann (1.3) and the Picard (1.2) iterations also. An example is also given in support of the claim.
Example 2 Let and . Let be a mapping defined by for all . For and , , the Abass et al. iteration (1.7) is faster than the Agarwal et al. iteration (1.6). Since Sahu [11] already has shown that the iteration (1.6) is faster than the Mann iteration (1.3), the iteration (1.7) is faster than the iterations (1.2), (1.3), and (1.6).
We now show that our process (1.8) converges faster than (1.7) in the sense of Berinde [10].
Theorem 2.3 Let C be a nonempty closed convex subset of a norm space E. Let T be a contraction with a contraction factor and fixed point p. Let be defined by the iteration process (1.7) and by (1.8), where , , and are in for all and for some ε in . Then converges faster than . That is, our process (1.8) converges faster than (1.7).
Proof As proved in Theorem 3 of Abbas and Nazir [9],
for all . Let
Now
so that
Thus
Let
Then
Consequently converges faster than . □
Now, we present an example which shows that the new iteration process (1.8) converges at a rate faster than the existing iteration schemes mentioned above.
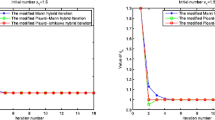
Example 3 Let and . Let be a mapping defined by for all . Choose , , , with the initial value . Our corresponding iteration process, the Abbas and Nazir iteration process (1.7), the Agarwal et al. iteration process (1.6), the Noor iteration process (1.7), the Ishikawa iteration process (1.4), the Mann iteration process (1.3), and the Picard iteration processes (1.2) are, respectively, given in Table 1.
All sequences converge to . Comparison shows that our iteration process (1.8) converges fastest among all the iterations considered in the example.
3 Convergence theorems
In this section, we give some convergence theorems using our iteration process (1.8); please, see Table 1 and Figure 1.

Convergence behavior of the Picard, the Mann, the Ishikawa, the Noor, the Agarwal et al. , the Abbas et al. iterations, and new iteration for the function given in Example 3 .
Lemma 3.1 Let C be a nonempty closed convex subset of a norm space E. Let T be a nonexpansive self mapping on C, defined by (1.8) and . Then exists for all .
Proof Let for all . From (1.8), we have
and
thus from (3.1) and (3.2)
Thus exists for all . □
We need following lemma to establish our next result.
Lemma 3.2 [12]Suppose that E is a uniformly convex Banach space and for all . Let and be two sequences of E such that , and hold for some . Then .
We now establish a result which will be of key importance for the main result.
Lemma 3.3 Let C be a nonempty closed convex subset of a uniformly convex Banach space E. Let T be a nonexpansive self mapping on C, defined by (1.8), where , , and are in for all and for some ε in and . Then .
Proof By Lemma 3.1, exists. Assume that .
From (3.1) and (3.2) we have
and
Since T is a nonexpansive mapping, it follows that
and
Taking lim sup on both sides, we obtain
and
Since
by using Lemma 3.2, we have
Now
yields
so that (3.5) and (3.8) give
On the other hand, we have
which yields
From (3.3) and (3.10) we get
Since T is a nonexpansive mapping, we have from (3.1)
From (3.4) and (3.11), by using Lemma 3.2 we obtain
Since
we write
then
so
and by Lemma 3.2, we have
This completes the proof. □
Lemma 3.4 [13]
Let C be a nonempty bounded closed convex subset of a uniformly convex Banach space and be a nonexpansive mapping. Then there is a strictly increasing and continuous convex function with such that
for all and .
Lemma 3.5 For any , exists, for all under the conditions of Lemma 3.3.
Proof By Lemma 3.1, exists for all and hence is bounded. Thus there exists a real number such that , so that D is a closed convex nonempty subset of C. Set
for all . Then and, from Lemma 3.1, exist.
Now it remains to show that exists for .
For each , define by
for all .
We see that
and
hence,
Set
and
for all . Then and . Also,
By Lemma 3.4, there exists a strictly increasing continuous function with such that
Since exists for all , we get and by the property of g, we get .
Now,
Consequently
Since , we get
This implies that exists for all , i.e., exists for all . □
Let E be a Banach space and unit sphere on E. The Banach space E is said to be smooth if
exists for each x and y in . In this case, the norm of E is called Gâteaux differentiable.
The space E is called Fréchet differentiable normed (see, e.g., [14]); for each x in E, the above limit exists and is attained uniformly for y in E, and in this case it is also well known that
for all , where J is the Fréchet derivative of the function at , is the dual pairing between E and , and b is an increasing function defined on such that .
Lemma 3.6 Assume that the conditions of Lemma 3.3 are satisfied. Then, for any , exists; in particular, for all , the set of all weak limits of .
The proof of Lemma 3.6 is similar to the proof of Lemma 2.3 of Khan and Kim [15].
A Banach space E is said to satisfy the Opial condition [16] if for each sequence in E, implies that
for all with .
A Banach space E is said to have the Kadec-Klee property if for every sequence in E, and together imply as .
We need the following to prove our next result.
Definition 3.7 A mapping is demiclosed at if for each sequence in C and each , , and imply that and .
Lemma 3.8 [17]
Let C be a nonempty closed convex subset of a uniformly convex Banach space E, and T a nonexpansive mapping on C. Then is demiclosed at zero.
Lemma 3.9 [8]
Let E be a reflexive Banach space satisfying the Opial condition, C a nonempty convex subset of E, and an operator such that demiclosed at zero and . Let be a sequence in C such that and exists for all . Then converges weakly to a fixed point of T.
Lemma 3.10 [18]
Let E be a real reflexive Banach space such that its dual has the Kadec-Klee property. Let be a bounded sequence in E and , here denotes the w-limit set of . Suppose exists for all . Then .
We now establish a weak convergence result.
Theorem 3.11 Let E be a uniformly convex Banach space and let C, T, and be as in Lemma 3.3 and . Assume that any of the following conditions hold:
-
(a)
E satisfies the Opial condition,
-
(b)
E has a Fréchet differentiable norm,
-
(c)
the dual of E satisfies the Kadec-Klee property.
Then converges weakly to a point of .
Proof Let , by Lemma 3.1, exists.
We prove that has a unique weak subsequential limit in .
Let u and v be weak limits of the subsequences and of , respectively. By Lemma 3.3, , and also is demiclosed with respect to zero, hence by Lemma 3.8, we obtain . In a similar manner, we have .
Next, we prove the uniqueness.
First assume that (a) holds. If , then, by the Opial condition,
This is a contradiction, so .
Next, assume (b) holds.
By Lemma 3.6, , for all . Therefore, implies .
Finally, assume that (c) is true.
Since exists for all by Lemma 3.5, by Lemma 3.10, and converges weakly to a fixed point of and this completes the proof. □
A mapping is said to be semicompact if any sequence in C, such that , has a subsequence converging strongly to some .
Next we establish the following strong convergence results.
Theorem 3.12 Let E be a uniformly convex Banach space and let C, T, and be as in Lemma 3.3. If T is semicompact and , then converges strongly to a fixed point of T.
Proof By Lemma 3.3, we have ; since T is semicompact, has a subsequence converging to some as C is closed. Continuity of T gives . Then by Lemma 3.3,
This yields . By Lemma 3.1, exists for all , and therefore must itself converge to and this completes the proof. □
Theorem 3.13 Let E be a uniformly convex Banach space and let C, T, , and be as in Lemma 3.3. Then converges to a point of if and only if , where .
Proof Necessity is obvious. Suppose that . As proved in Lemma 3.3, exists for all , therefore exists. But by hypothesis, , therefore .
We will show that is a Cauchy sequence in C. Since , for given , there exists in ℕ such that, for all ,
Particularly, . Hence, there exists such that . Now, for ,
Hence is a Cauchy sequence in C. Since C is a closed subset of a complete space, . Since is closed, gives , i.e., . □
Definition 3.14 A mapping , where C is a subset of a normed space E, is said to satisfy Condition (I) [19] if there exists a nondecreasing function with , for all such that for all where .
Applying Theorem 3.13, we obtain strong convergence of the process (1.8) under Condition (I) as follows.
Theorem 3.15 Let e be a uniformly convex Banach space and let C, T, and be as in Lemma 3.3. Let T satisfy Condition (I), then converges strongly to a fixed point of T.
Proof We proved in Lemma 3.3 that
From Condition (I) and (3.17), we get
i.e., . Since is a nondecreasing function satisfying , for all , we have
Now all the conditions of Theorem 3.13 are satisfied, therefore, by its conclusion, converges strongly to a point of . □
References
Krasnosel’skii MA: Two remarks on the method of successive approximations. Usp. Mat. Nauk 1955, 10: 123-127.
Schaefer H: Über die methode sukzessiver approximationen. Jahresber. Dtsch. Math.-Ver. 1957,59(1):131-140.
Mann WR: Mean value methods in iteration. Proc. Am. Math. Soc. 1953, 4: 506-510. 10.1090/S0002-9939-1953-0054846-3
Byrne C: A unified treatment of some iterative algorithms in signal processing and image reconstruction. Inverse Probl. 2004,20(1):103-120. 10.1088/0266-5611/20/1/006
Kim TH, Xu HK: Strong convergence of modified Mann iterations. Nonlinear Anal. 2005,61(1-2):51-60. 10.1016/j.na.2004.11.011
Ishikawa S: Fixed points by a new iteration method. Proc. Am. Math. Soc. 1974, 44: 147-150. 10.1090/S0002-9939-1974-0336469-5
Noor MA: New approximation schemes for general variational inequalities. J. Math. Anal. Appl. 2000,251(1):217-229. 10.1006/jmaa.2000.7042
Agarwal RP, O’Regan D, Sahu DR: Iterative construction of fixed points of nearly asymptotically nonexpansive mappings. J. Nonlinear Convex Anal. 2007,8(1):61-79.
Abbas M, Nazir T: A new faster iteration process applied to constrained minimization and feasibility problems. Mat. Vesn. 2014,66(2):223-234.
Berinde V: Picard iteration converges faster than Mann iteration for a class of quasicontractive operators. Fixed Point Theory Appl. 2004, 2: 97-105.
Sahu DR: Applications of the S -iteration process to constrained minimization problems and split feasibility problem. Fixed Point Theory 2011,12(1):187-204.
Schu J: Weak and strong convergence to fixed points of asymptotically nonexpansive mappings. Bull. Aust. Math. Soc. 1991,43(1):153-159. 10.1017/S0004972700028884
Bruck RE: A simple proof of the mean ergodic theorem for nonlinear contractions in Banach spaces. Isr. J. Math. 1979,32(2-3):107-116. 10.1007/BF02764907
Takahashi W, Kim GE: Approximating fixed points of nonexpansive mappings in Banach spaces. Math. Jpn. 1998,48(1):1-9.
Khan SH, Kim JK: Common fixed points of two nonexpansive mappings by a modified faster iteration scheme. Bull. Korean Math. Soc. 2010,47(5):973-985. 10.4134/BKMS.2010.47.5.973
Opial Z: Weak convergence of the sequence of successive approximations for nonexpansive mappings. Bull. Am. Math. Soc. 1967, 73: 591-597. 10.1090/S0002-9904-1967-11761-0
Goebel K, Kirk WA Cambridge Studies in Advanced Mathematics 28. In Topics in Metric Fixed Point Theory. Cambridge University Press, Cambridge; 1990.
Kaczor W: Weak convergence of almost orbits of asymptotically nonexpansive semigroups. J. Math. Anal. Appl. 2002,272(2):565-574. 10.1016/S0022-247X(02)00175-0
Senter HF, Dotson WG: Approximating fixed points of nonexpansive mappings. Proc. Am. Math. Soc. 1974, 44: 375-380. 10.1090/S0002-9939-1974-0346608-8
Acknowledgements
The second author would like to thank the Rajiv Gandhi National Fellowship of India for the grant (F1-17.1/2011-12/RGNF-ST-CHH-6632).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made.
The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
To view a copy of this licence, visit https://creativecommons.org/licenses/by/4.0/.
About this article

{kind=link}
Cite this article
Thakur, D., Thakur, B.S. & Postolache, M. New iteration scheme for numerical reckoning fixed points of nonexpansive mappings. J Inequal Appl 2014, 328 (2014). https://doi.org/10.1186/1029-242X-2014-328
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1029-242X-2014-328