
Abstract
Tremor is an involuntary and oscillatory movement disorder that makes daily activities difficult for affected patients. Hand tremor-suppression orthoses are noninvasive, wearable devices designed to mitigate tremors. Various studies have shown that these devices are effective, economical, and safe; however, they have drawbacks such as large weight, awkward shape, and rigid parts. This study investigates different types of tremor-suppression orthoses and discusses their efficiency, mechanism, benefits, and disadvantages. First, various orthoses (with passive, semi-active, and active mechanisms) are described in detail. Next, we look at how additive manufacturing (AM) has progressed recently in making sensors and actuators for application in tremor orthoses. Then, the materials used in AM are further analyzed. It is found that traditional manufacturing problems can be solved with the help of AM techniques, like making orthoses that are affordable, lighter, and more customizable. Another concept being discussed is using smart materials and AM methods, such as four-dimensional (4D) printing, to make orthoses that are more comfortable and efficient.
Graphic abstract

Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Tremor is an involuntary quivering movement of a body part, which is usually rhythmic and oscillatory [1]. This involuntary movement interferes with affected patients’ activities of daily living (ADL), such as drinking, eating, writing, dressing, or bathing. Tremors are the most common type of movement disorders and are either associated with other neurological conditions such as Parkinson’s disease (PD) and essential tremor (ET), or are a result of drug or alcohol abuse [2]. Among diseases with tremor symptoms, PD and ET principally affect the upper limbs and make ADLs harder for patients.
Since the causes of PD and ET are uncertain [3], their treatment options focus on symptomatic relief [4]. While drugs are the most frequent form of treatment for tremors, up to 53% of the patients stop using them because of the lack of effectiveness or adverse effects [5]. Deep brain stimulation is a surgical procedure to relieve PD and ET symptoms. However, it is an invasive treatment that can lead to side effects such as changes in the behavioral, cognitive, and mental status in up to 48% of the individuals undergoing surgery [6]. Therefore, patients who do not respond to medicine or are ineligible for deep brain stimulation require alternative treatments. Noninvasive treatments such as occupational therapies, handheld devices, and wearable devices can act as substitutes for medications and deep brain stimulation. As occupational therapies usually provide a short-term treatment option and handheld devices are designed for specific tasks, at present, wearable devices are the only viable alternatives for patients to attenuate their hand tremors and regain their ability to perform daily tasks.
Tremors exhibit varying characteristics according to the underlying disease. Researchers have classified tremors based on their features as follows:
-
1.
Tremor situation: Based on the tremor phenomenology, the tremor can occur in the resting, postural, or active positions [7]. A rest tremor occurs when a limb does not have voluntary movement and is supported against gravity. On the other hand, if a tremor occurs during muscle contraction, it is called an action tremor. Action tremors have certain subclassifications, as described in Table 1.
Table 1 Phenomenology of tremors [7] -
2.
Tremor joint: PD and ET tremors mostly appear in the upper limb joints and muscles. As shown in Fig. 1, the mechanical model of the upper limb (including the shoulder, elbow, and wrist) has a total of seven degrees of freedom (DOF).
Fig. 1 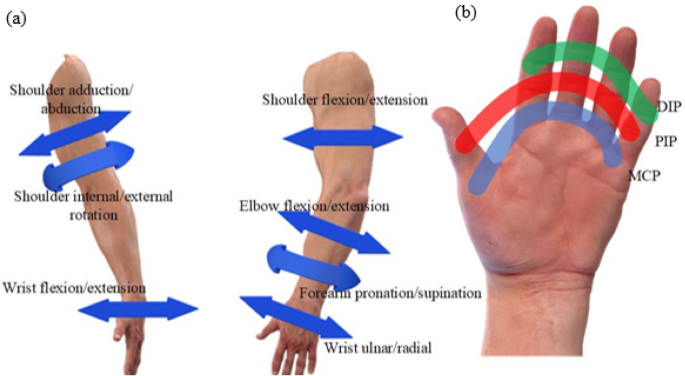
a Arm degrees of freedom (DOF); b finger joints, including the metacarpophalangeal (MCP) joints, proximal interphalangeal (PIP) joint, and distal interphalangeal (DIP) joint
-
3.
Tremor severity: Tremor severity is classified into three groups: mild, moderate, and severe. It is possible to measure tremors with electromyography or accelerometers, and they can be classified based on their signal characteristics, such as amplitude and frequency [8].

PD tremors are usually resting tremors that disappear when the patient starts to use their hand. Their frequency ranges from 3 to 5 Hz [1]. Furthermore, postural tremors occur in about 90% of PD patients with resting tremors [9], and they have similar frequencies. ET is the most common movement disorder of the upper limb [10], which usually occurs in kinetic situations, commonly in the arm and hand muscles [11], featuring a larger amplitude than PD’s postural tremors [12]. ET tremors are known as mid- to high-frequency tremors, and range from 5 to 10 Hz [1]. In a study of 11 PD and 10 ET cases, the postural tremor amplitude in PD cases was reported to be 2.7 times larger than that in ET cases on average [13]. Different studies on ET have shown that forearm rotation and wrist flexion/extension tremors are the most severe kinetic tremors [14]. Different DOFs have almost the same distribution order as posture tremors, except for the forearm rotation tremor that has smaller power than wrist flexion/extension [15].
The remainder of this paper is structured as follows: in “Tremor suppression mechanisms” section, the existing pharmacological, surgical, and therapeutic treatments of tremors are reviewed, followed by a summary of handheld devices for tremor suppression. Then, various types of tremor suppressors, including passive, semi-active, and active mechanisms, are presented. In “Additive manufacturing of soft orthoses and materials” section, additive manufacturing (AM) methods and materials for fabricating multiple sensors and actuators (used in tremor-suppression orthoses) are discussed. The current challenges and future directions for tremor-suppression orthoses are given in “Discussion” section. Finally, the paper is summarized and concluded in “Conclusions” section.
Tremor suppression mechanisms
Medical treatments
Pharmacological approach
Over the past few decades, researchers in various fields have attempted to find methods to stop tremors caused by PD or ET, including pharmacological, surgical, and therapeutic strategies, which are summarized in Table 2. Pharmacological treatments for ET have been the first and most well-known choice for patients since the 1970s. Propranolol as a beta-blocker drug is one of the most common drugs for ET, while it has side effects such as headaches and insomnia, which could lead to contraindications with other drugs used by the patient [16]. Furthermore, some patients do not respond to this type of drug [16]. Another recommended medication for suppressing tremors in the limbs is primidone. A study on 11 patients showed that the efficacy of primidone decreases over time (from 45% in the first month to 41% in the twelfth month) [17]. Almost half of the individuals with ET who take this medication exhibited recurrent tremors or insufficient improvement in tremors, intense adverse effects, or contraindications to the medicine [18]. Another study revealed that propranolol and primidone can cost about $269 annually (assuming that people take both medications) [19]. Dopamine-based drugs such as levodopa, dopamine agonists, or monoamine oxidase-B have been prescribed for PD patients, although side effects like nausea and dizziness have been reported [20]. A 48-month study to compare levodopa and dopamine agonists reported that, even though levodopa has more severe side effects, it has a 3.4 ± 12.3 improvement score compared to the Unified Parkinson Disease Rating Scale (UPDRS) score (a rating tool, with scores from 0 to 199, used to evaluate the severity of PD), when evaluated in the first month [21]. At the same time, dopamine agonists decrease the UPDRS score by 1.3 ± 13.3. Research in the UK has shown that the cost associated with levodopa/carbidopa intestinal gel (a combination of levodopa and carbidopa in a ratio of 4:1) treatment is about $130,000 in a lifetime [21].
Surgical approach
Another solution to cope with diseases that have tremor symptoms is surgical intervention. Thalamic lesioning was the first described surgical solution for ET. Deep brain stimulation (DBS) was performed in the 1990s by surgeons to treat ET and PD. During DBS surgery, electrodes are precisely implanted in the subthalamic nucleus and connected to a pulse generator. Then, the pulse generator is programmed to stimulate the brain to decrease tremors and other symptoms of the disease. In a study involving 28 ET patients, the efficacy of the surgery decreased from 66% improvement in year one to 48% after 10 years [22]. Dysarthria and disequilibrium have also been reported as side effects of DBS surgery [23]. In addition, DBS surgery is not cost-effective at $37,000 for primary surgery [19]. A less invasive treatment for these conditions is magnetic resonance imaging guided focused ultrasound (MRIgFUS), which does not need surgery because the ultrasound waves can penetrate and burn the thalamus directly. Even though significant improvements in tremor have been reported in ET and PD patients after MRIgFUS treatment, it has transient adverse effects such as sculpting burn and numbness, headache, nausea, along with persistent side effects like paresthesia (a burning or prickling sensation) and ataxia (disorders that affect coordination, balance, and speech) [24, 25]. MRIgFUS can also cause unintended damage to other nerves, leading to muscle weakness or a loss of sensation (this effect can be transient or persistent). Furthermore, this treatment is unavailable for the majority of patients because it costs nearly $20,000 [19], and there is a 9% chance of tremor recurrence in the first year [26].
Therapeutic approach
Therapists have suggested different techniques to alleviate the effects of tremors on patients’ lives. Although weighted therapy does not result in hand tremor improvement [27], it is one of the most common therapeutic treatments for tremor. Another therapeutic treatment is called “cooling therapy.” Researchers reported that cooling therapy could significantly decrease tremors in ET patients who were drawing spirals or feeding [28]. In a study involving 18 patients, individuals tracked computer mouse cursors to a target point on a monitor before and after limb cooling [29]. The results showed that patients had a 15.6 mm average endpoint error, which dropped to 9 mm 30 min after cooling. However, cooling or warming the limb had no effect on tremors in the upper limb [28]. In addition, vibration therapy has been tested on ET and PD patients, and devices like the Vilim ball (various frequencies from 8 to 18 Hz and 0–2 mm amplitude) work based on vibration therapy [30]. It was further indicated that mechanical vibration with a frequency between 50 and 450 Hz could not reduce hand tremors for ET [31].
Handheld devices
Handheld devices were developed as an additional strategy to cope with tremors in ET and PD patients. Engineers and researchers around the world have made utensils, writing tools, clothing designs, computer and phone accessories, and applications to make life easier for patients with upper limb tremors. Spoons with active cancellation of tremors (ACT), such as Liftware Steady, can reduce the tremor of the utensil by around 71 to 76% [32], although their battery life and price can be a deterrent to their wide application. Research on 16 PD patients with three different spoons and weighted bracelets showed that weighted utensils alone could not improve hand tremors with regard to their amplitude and frequency [27].
Wearable devices (exoskeleton)
A practical approach to improving hand tremors is to use wearable devices or exoskeletons. Tremor exoskeletons could be mechanical, electrical, or electromechanical. Electrical devices or functional electrical stimulation (FES) devices generate electrical signals and cause muscle contractions through electrodes [33]. Reports showed good efficiency for FES devices, but patients could feel numbness or a burning sensation in their arms [34]. Moreover, pregnant and cancer patients, along with those that have implanted electrical devices in their bodies, cannot use FES [35]. Wearable tremor suppressors also include mechanical and electromechanical types, which can be classified as passive, semi-active, or active, based on their mechanisms. Passive devices can suppress tremors, but they also affect voluntary motion. On the other hand, active devices can suppress tremors and support voluntary muscle contractions at the same time. Furthermore, they are usually adaptive to tremor frequency and amplitude, and can be switched on or off based on the presence of the tremor. Semi-active devices act like passive devices in suppressing tremors; that is, they do not support voluntary motion while mitigating tremors, but can automatically tune to tremor frequency (Table 3).
Passive mechanisms
A mechanical orthosis is a kind of device that contains only mechanical parts, and it mitigates tremors without requiring an energy source or electrical units. Researchers have used different passive methods and devices (Table 4) to decrease tremor amplitude, starting with viscous beam wearable tremor suppression [36].
This kind of device is designed and installed on the dorsal side of the hand and forearm, and it decreases the wrist flexion/extension tremor amplitude based on friction; however, friction can also affect voluntary motion [36]. Another purely mechanical method to cope with tremors is a mass–spring–damper system (MSD). The MSD contains a mass and a spring; when its natural frequency is equal to the excitation frequency, vibrations are dampened [47]. In 2004, Hashemi et al. fabricated a tuned vibration absorber (TVA) based on the MSD mechanism to mitigate PD hand tremors [37]. Experiments on a mechanical hand with 2.7 Hz of tremor frequency showed 14.27 dB and 13.93 dB decreases in the upper arm and forearm tremor amplitude, respectively [37].
In 2018, Rudraraju and Nguyan designed a wearable passive tremor reduction device (TRD) to suppress hand tremors [38]. The results from simulation, mechanical hands, and patient tests showed a significant percentage reduction of 70% to 80% in tremor amplitude. The developed MSD unit weighs approximately 215 g, and the TRD device weighs about one pound [38]. In another study published in 2018, Buki et al. developed a passive hand tremor attenuation device called the Vib-bracelet, tuned to tremor frequency based on MSD (Fig. 2b) [39], to suppress pronation/supination tremors. This device includes an inner and an outer (57 mm radius) ring and weighs 280 g. The result of simulation and the manufactured prototype mounted on a mechanical model of the forearm showed a maximum of 85% mitigation of tremors at 4.75 Hz. However, the Vib-bracelet is heavy and bulky, and has not been tested on humans.

Various passive mechanisms: a magnetic tremor suppressor (reproduced from [40], with permission from University of British Columbia under CC BY-NC-ND 4.0 license); b Vib-bracelet, designed to suppress forearm pronation/supination (reproduced from [39], Copyright 2017, with permission from International Federation for Medical and Biological Engineering); c Air-filled tremor attenuation orthosis—(c1) schematic view and (c2) fabricated glove (reproduced from [41], Copyright 2020, with permission from the authors, licensed under CC BY 4.0)
The magnetic spring mechanism is another passive method to reduce tremor amplitude. In 2018, Masoumi designed and manufactured a hand tremor attenuator glove based on magnetic forces (Fig. 2a) [40]. Hand tremor was simulated by fixing a vibrating motor on the human forearm. The tremor attenuator showed good efficiency in drinking and eating tasks, but not in attenuating tremor amplitude [40]. In 2020, Formme et al. proposed and implemented a new adjustable air-filled tremor attenuation orthosis (Fig. 2c) [41]. This device has a simple structure (an airbag) that can be adjusted by inflation or deflation. The orthosis was tested on a PD patient, and it showed good efficacy (74 to 84%) for drinking, pouring, and spiral drawing [41]. The device is attached to the dorsal side of the wrist and has a small effect on voluntary motion. Even though the device is lightweight (33 g) and compact, and does not require an energy source, it has to be inflated or deflated for different tasks to ensure that it has a task-specific size and stiffness to reach maximum efficiency. As upper limb tremor has a higher frequency than intended motions, non-Newtonian fluids are a suitable smart material to attenuate hand tremor. For example, Steadiwear is a tremor damping glove that works with a non-Newtonian fluid effect [42, 43].
Takanokura et al. proposed air dashpots to mitigate tremors and implemented orthoses to suppress wrist and elbow flexion/extension and wrist ulnar/radial tremor. The device was tested on a healthy person with a muscle stimulator to generate tremors in the upper arm. The results indicated 62 and 82% tremor improvement in the wrist and elbow, respectively, when utilizing two dashpots [44]. In 2020, Lu and Huang proposed a particle damper to suppress tremors [45]. They confirmed the efficiency of the particle damping mechanism through numerical simulation and experiments. Furthermore, it was reported that the device performance improves by increasing the particle mass. Experiments proved that particle dampers have higher efficiencies at higher frequencies (up to 37%) [45]. In addition, the gyroscope effect has been used to suppress vibration in many fields. In 2019, Zulkefli et al. proposed an intelligent glove to mitigate resting hand tremor in PD by using the gyroscope effect [46]. They tested the glove on a mechanical model imitating resting tremors from 3 to 7 Hz, and the results exhibited a minimum of 50% reduction in tremor acceleration [46].
Semi-active mechanisms
In the semi-active approach of tremor suppression, engineers have tried to eliminate hand tremor and minimize the orthosis effect on voluntary hand motion. In such cases, most researchers applied passive methods to hand tremors with added controllers and sensors (Table 5). In 2013, Herrnstadt and Menon fabricated a friction-based tremor absorber device based on an electromagnetic brake system and designed to be fixed on the elbow (Fig. 3a) [48]. The prototype was 3D-printed and weighed 942 g. It contains magnetic brakes and two sensors to collect the tremor size and elbow angle. When a tremor occurs, the controller activates the brakes to decrease tremor amplitude. The tested results showed an 88% efficiency [48].

Different semi-active mechanisms: a Magnetic brake tremor damper (reproduced from [48], Copyright 2013, with permission from the authors, licensed under CC BY 3.0); b flexible semi-active actuator based on MR fluid
Another method to utilize friction in tremor mitigation is to use magnetorheological (MR) fluid that contains distributed magnetic particles in a carrier fluid; when a magnetic field is applied to it, the fluid viscosity increases. MR fluid has good flexibility, high response speed, and variable impedance for use in tremor-suppression orthoses. In 2005, Loureiro et al. designed the double viscous beam device grounded on an MR fluid [49]. The results on an ET subject showed 43 dB and 17 dB decreases in tremor at 4 Hz and 1 Hz, respectively, along with low power consumption (1 W) [49]. Recently, Zahedi et al. designed and fabricated a controllable flexible semi-active actuator with MR fluid [50]. They added a cylinder–piston damper to increase the efficiency. Their test results on five healthy subjects showed 61.39 and 56.22% decrease in tremor acceleration and angular velocity, respectively [50]. Figure 3b shows an orthosis based on changing the stiffness of the MR fluid in a flexible link.
The natural frequency of a dynamic vibration absorber (DVA) can be changed by varying its mass or spring constant. Teixeira et al. presented a self-tunable DVA [51] and tried to tune the DVA frequency by changing its mass. The proposed system used two hydraulic pumps to fill or empty the DVA reservoir at a controlled rate to change its natural frequency. The proposed systems showed 50 and 80% efficiency, respectively [51].
There have been numerous attempts to exploit soft robots and smart materials for soft wearable orthoses. In 2020, Narang et al. developed a sandwich jamming structure (SJS) with a high stiffness range and stiffness to mass ratio [52]. The structure includes multiple layers (e.g., paper and textile) in an airtight bag. The layers are free to slide in the normal state, and the subject can bend the structure with slight resistance; however, if the controller vacuums the bag, the layer’s friction increases and it becomes resistant to sliding. Based on this SJS characteristic, they proposed a soft wearable orthosis to mitigate upper limb tremor. The device prototype was tried on nine subjects and showed a 41% decrease in tremors in the ON-state, while it had a negligible effect on voluntary motion in the OFF-state [52]. Another study conducted by Awantha and colleagues in 2020 utilized a layer jamming structure (LJS) in suppressing hand tremor [53]. They attempted to eliminate finger tremor by fastening layer jamming and applying resistance to finger motion. To test the soft glove, a mechanical hand model was fabricated with the ability to imitate hand tremors between 3 and 6 Hz. The results showed a maximum of 78.3% decrease in tremor amplitude when the LJS was placed on the palm side, and a 38.2% improvement was reported on the dorsal side [53].
Active mechanisms
The weight of orthoses and braces can limit voluntary movement. Therefore, researchers have worked on another paradigm, called active attenuators, to mitigate this drawback for patients, developing and fabricating various devices (Table 6). In this approach, hand orthoses support voluntary motion and suppress hand tremors. In 2005, a wearable orthosis for tremor assessment and suppression (WOTAS) exoskeleton was manufactured [54]. This apparatus includes various parts, including direct current (DC) motors, sensors, and controller units. The DC motor power is utilized to suppress tremors in different joints, including wrist flexion/extension, forearm pronation/supination, and elbow flexion/extension. In a study on 10 patients with various tremor diseases, this type of orthosis was 40% effective [55]. Despite its efficacy, the WOTAS is too bulky and heavy.
In 2017, Zhou et al. proposed a multi-channel mechatronic splitter (MMS) to mitigate hand tremors while allowing patients to continue ADL without restriction (Fig. 4c) [56]. The MMS system is powered by a 2 W DC motor and weighs 129 g (excluding the motor and power supply). Data recorded from seven PD patients were used to evaluate the MMS, and the results showed a 12.4% root mean square error (RMSE) for voluntary motion tracking [56]. Recently, Herrnstadt and Menon designed and produced an active tremor suppressor orthosis (TSO) with brushless DC motors, proportional–integral–derivative (PID) controllers, proportional–integral (PI) controllers, and sensors to detect hand motion (Fig. 4a) [57]. This orthosis was designed to be fixed on the upper arm and forearm, weighing 1700 g. The device was tested on nine patients, including those with Parkinson’s disease and essential tremors. The results showed a 94% reduction in the mean power of the tremor signal, and even though they nearly eliminated the interference of TSO on motion power and velocity, a small error in the position tracking of hand motion was reported [57]. Similar to WOTAS, this orthosis is also relatively bulky.

a Tremor suppressor orthosis (TSO) with brushless DC motors (reproduced from [57], Copyright 2019, with permission from the authors, licensed under CC BY 4.0); b orthosis with permanent magnet linear motor (PMLM) actuators (reproduced from [59], Copyright 2019, with permission from Elsevier); c tremor suppressors with multi-channel mechatronic splitters (MMS) (reproduced from [56], Copyright 2017, with permission from Elsevier); d pneumatic artificial muscle (PAM) tremor suppressor (reproduced from [61], Copyright 2021, with permission from the authors, licensed under CC BY 4.0)
In 2019, Hosseini et al. designed a hand suppressor (active) with piezoelectric actuators and sensors on the top and bottom side of the arm [58]. The tremor data were collected through the piezoelectric layer, analyzed, and then mitigated using a proportional–derivative (PD) controller [58]. It was also reported that increasing the controller gain and piezoelectric constant can improve the efficiency of the attenuator. Furthermore, it has been shown that changing the dielectric constant does not affect the attenuator [62]. Zamanian et al. designed an active tremor suppressor (for extension/flexion and radial/ulnar tremors) through the use of permanent-magnet linear motors (PMLMs) and a notch filter (Fig. 4b) [59]. To evaluate the device, they employed a hand emulator running on recorded tremor signals from PD patients; a wavelet transform was used to analyze tremor signals with and without a tremor suppressor. They reported 30.51 dB and 13.89 dB suppression in the first and second components of the tremor signal, respectively, and claimed that it has a negligible effect on voluntary motion (0.36 N) [59]. The results showed that PMLM actuators are more energy-efficient than servo-pneumatic actuators.
In 2020, Wirekoh et al. proposed a hand tremor attenuator with fiber-reinforced bending pneumatic artificial muscle (BPAM) and fabricated it in a finger-scale size [60]. The prototype has good flexibility to move in a 40-degree peak-to-peak range at frequencies between 4 and 8 Hz (normal frequency for PD and essential tremor) [60]. In 2021, Skaramagkas et al. constructed another hand tremor suppressor orthosis (Fig. 4d) using PAMs [61]. The prototypes were manufactured to suppress different tremors of the wrist and finger extension/flexion. The orthosis contains accelerometer sensors to gather tremor data and a PID controller. In an experiment on an ET subject at different positions (postural and kinetic tremor), the results showed an efficiency of 70% for index finger tremor. Moreover, the orthosis reduced thumb and wrist tremor by 50 and 40%, respectively [61].
Comparing passive, semi-active, and active mechanisms
In contrast to semi-active and active orthoses, passive orthoses do not have any components that require a power source. However, their simple mechanism for reducing tremors makes it difficult for people to move voluntarily. Furthermore, MSD-based passive devices incorporate components with additional mass, which makes them unwieldy for patients. For the semi-active method, researchers have often relied on the same method used in passive mechanisms. However, they add sensors and controllers to obtain feedback on tremors and tune the device automatically. Using traditional brakes or actuators makes these devices heavy and uncomfortable to the wearer. Active devices have high efficiency and can support voluntary movement, but their drawback is that traditional actuators require the fabrication of cumbersome and heavy orthoses. A major research direction is to reduce the total weight of the devices to increase their wearability. Recently, the proposal of smart materials [50] and soft actuators [52] in designing semi-active orthoses has led to a flexible and conducive structure. Another research team has designed an active device by exploiting compliant and flexible dielectric elastomer stack actuators to simplify the wearing of tremor orthoses [63]. Additionally, Hosseini et al. proposed paired piezoelectric sensors and actuators to build more compact and lightweight devices [58].
Additive manufacturing of soft orthoses and materials
Most conventional robots and actuators are based on rigid materials that are not suitable for wearable devices. However, there has been a recent surge of research interest in the use of smart materials and soft actuators in various fields [64, 65]. Even though the manufacture and manipulation of soft robots pose additional challenges, their characteristics—such as low weight and compliance—make them ideal candidates for wearable orthoses [64]. 3D and 4D printing technologies are capable of fabricating complex shapes for robots and actuators with different smart materials [66]. Unlike 3D-printed products that are static, in 4D printing, the fabricated product can change dynamically over time in response to external stimuli [67], making it a better alternative to producing wearables. By utilizing 4D printing, researchers could integrate different parts and functions during manufacturing into active and semi-active wearable orthoses to save time and effort while enhancing the flexibility and customization of the products. Next, we look at sensors and actuators that have already been used in hand tremor orthoses, and recent developments in the fabrication of these sensors and actuators by 3D and 4D printing.
3D/4D-printed sensors
In “Tremor suppression mechanisms” section, different mechanisms for mitigating tremors, including passive, semi-active, and active mechanisms, have been explained. In the semi-active and active mechanisms, the activation of the orthosis is dependent on the presence of different types of hand tremor. The semi-active mechanism is similar to the passive mechanism, with the additional option of an OFF–state in the absence of tremors. Furthermore, in these kinds of orthoses, different parameters of the device, including the friction coefficient and stiffness, are changeable and can be tuned to attenuate tremors of different amplitudes and frequencies. Moreover, active mechanisms for mitigating tremors apply force in the opposite direction of the tremor but at an equal amplitude. Therefore, in semi-active and active mechanisms whose functions depend on the tremor characteristics, identifying tremors is vital to achieve good performance. Thus, sensors play a primary role in data collection in orthoses to monitor the tremor characteristics.
A wide range of sensors, such as electrocardiogram (ECG) [68], electromyogram (EMG) [69], electroencephalogram (EEG) [70], pressure [71], temperature [72], and strain [73] sensors, have been employed in wearable or implantable devices. For instance, Zahedi et al. and Skaramagkas et al. utilized acceleration sensors in semi-active and active mechanisms, respectively [50, 61]. In 2013, Herrnstadt and Menon exploited gyroscope and potentiometer sensors to gather the tremor data of forearms to suppress flexion/extension in their semi-active device [48]. Herrnstadt et al. used a displacement sensor in their self-constructed exoskeleton to collect tremor data [57]. An electromyography sensor can obtain muscle contraction data, which was utilized for fabricating an electrical orthosis to extract tremor signals from muscle activity [74].
Many manufacturing techniques are available for the fabrication and development of sensors. Common methods include laser cutting [75], photolithography [76], contact printing [77], and 3D printing [78]. Among these, 3D printing has grown in popularity owing to its specific advantages over other methods. In addition, it requires a relatively short production time and includes fewer manual production tasks, implying the possibility of operation without human intervention in the future. Despite the nonlinearity and hysteresis effect of some 3D-printed sensors [79], reports have shown that the additively manufactured sensors can be fabricated with high resolution, accuracy, and repeatability [80]. These make 3D-printed sensors viable alternatives to available solutions. Reusability is another excellent benefit of this approach, which comes without any loss of efficiency or sensitivity [81]. The greatest advantages of 3D printing are quick fabrication, the simple manufacturing process involving a small number of steps, and less human intervention [82]. Zheng et al. recently reported that, even though 3D-printed sensors have disadvantages—such as high cost—and the fact that they still represent an immature technology [83], 3D printing and smart materials have led to the development of 3D-printable sensors with complex shapes that can be integrated with soft orthoses and actuators through various conductive materials, like carbon-based materials [83] and liquid metals [84]. In the early stage of research, conductive materials and circuits were built and embedded in 3D-fabricated structures [85], but as 3D printing technology advanced, both parts were produced by 3D printers [86], making the fabrication process easier, faster, and more economical. In addition, although certain improvements are required for 3D printers to fabricate more precise structures [87], AM exhibits promising results in terms of producing more personalized structures [83] and integrating them into orthoses and prostheses [83, 87]. These advantages of 3D printing render the production process cost-effective and time-saving. In this section, we review recent 3D/4D printing improvements in terms of fabricating sensors; researchers have already tested these types of sensors to study hand tremors, including accelerometers, displacement sensors, and EMG sensors.
Accelerometers
Tremor acceleration is a parameter that has been used to rank tremor severity. Thus, accelerometers are commonly used in upper limb tremor mitigators for data collection [38, 46, 50, 61]. Acceleration usually differs between joints; i.e., each joint’s acceleration can vary slightly. Knowing the exact frequency of hand tremor is crucial for tuning hand orthoses to efficiently absorb tremors. Therefore, an ideal 3D-printed accelerometer should have high sensitivity and quick response to timely detect tremors. 3D-printed capacitive accelerometers have been fabricated in the past with acceptable sensitivity (> 12 fF/g) [88,89,90] (Fig. 5a). In another study, an accelerometer based on a Fabry–Pérot cavity was designed and constructed using a 3D printer [91], including a G-shaped mass–spring structure with high sensitivity (183.793 V/g) and resolution (300 ng). The piezoresistive accelerometers were 3D-printed using a stereolithography apparatus (SLA) (Fig. 5b) and fused deposition modeling (FDM), yielding acceptable sensitivities of 11.98572 mV/g and 13 µVs2/m, respectively [92, 93]. Furthermore, a uniaxial Ti6Al4V alloy accelerometer has been proposed that uses laser powder bed fusion (L-PBF), which is small in size and exhibits a sensitivity of 184 fF/g [94].

3D-printed sensors: a Capacitive accelerometer (reproduced from [90], Copyright 2021, with permission from the authors, under exclusive license to Springer Science Business Media, LLC, part of Springer Nature); b piezoresistive accelerometer (reproduced from [92], Copyright 2020, with permission from the authors, licensed under CC BY 4.0); c EMG sensor (reproduced from [87], Copyright 2020, with permission from the authors, licensed under CC BY 4.0); d displacement sensor (reproduced from [95], Copyright 2019, with permission from Elsevier)

3D-printed soft actuators and structures: a Compliant wrist joint (reproduced from [96], Copyright 2021, with permission from Elsevier); b Dielectric actuator (reproduced from [97], Copyright 2019, with permission from Wiley); c Hand assistant device with a hydraulic actuator (reproduced from [98], Copyright 2015, with permission from Elsevier)
Displacement sensors
Displacement sensors are utilized in tremor orthoses, such as elbow orthoses, to measure tremor angles [57]. In a group of 3D-printed magnetic displacement sensors, the detection and measurement steps are performed based on the Hall effect [99]. Besides, the effect of eddy currents has been used for measurement in other AM magnetic sensors [100]. Li et al. reported that 3D-printed eddy current sensors have a wider range of linearity than traditional sensors, and their fabrication is faster and cheaper [101]. Recently, a displacement sensor based on a pinhole camera concept (Fig. 5d) was developed, which projects light through the pinhole and affects four photodiodes [95].
Electromyography sensors
Electromyography (EMG) biosensors are placed on subjects’ skin to measure electrical pulses from muscle contractions. In tremor studies, EMG sensors are commonly utilized to distinguish tremors from intentional motions. Flexible and soft EMG sensors have been 3D-printed with FDM, and they demonstrated comparable performance to traditional sensors [87, 102] (Fig. 5c).
3D/4D-printed actuators
In upper limb orthoses, actuators aid the motion of or imitate certain body parts. Most traditional actuators are heavy, rigid, and bulky, which makes the accommodating orthoses or prostheses uncomfortable to wear. Recent studies have shown that soft actuators, with low weight and the capacity to impose high forces, have a high potential for application in orthotic and prosthetic devices. Furthermore, AM has enabled the fabrication of soft actuators in complex and customized shapes, with greater production speed [65]. Next, we focus on actuators that have been used in tremor orthoses, and review recent studies on fabricating these actuators via AM.
Pneumatic and hydraulic actuators
Unlike their rigid counterparts, soft actuators are stretchable and flexible, and allow for more comfortable interactions with the human body. The two common soft actuator types used to produce bio-assistant devices are pneumatic [103] and hydraulic [104]. Wirekoh et al. developed a fiber-reinforced bending pneumatic artificial muscle specifically to suppress finger tremors [60]. With recent advancements in 3D/4D printing, it has become possible to fabricate soft pneumatic (Fig. 6c) [98, 105] and hydraulic [106] actuators customized for each patient in different sizes and complex shapes. These 3D-printed pneumatic actuators have shown high (up to 26) payload-to-mass ratios, high actuation speeds, and long lifetimes [107, 108]. Closed-loop 4D-printed soft actuators (a specific type of 4D-printed actuator with a closed-loop controller and embedded sensors) have been developed with embedded 3D printable sensors, and exhibited promising results in controlling robots incorporating recent advancements [109,110,111,112], giving them great potential for use in tremor suppression.
Shape memory material
Shape memory materials (SMMs) can recover their original shape under appropriate external stimuli. Hand orthoses made of SMMs are efficient in tremor suppression. Shape memory alloys (SMAs) have been utilized in a flexible wearable actuator for hand tremor suppression [113, 114]. Shape memory polymers (SMPs) have significantly contributed to the 4D printing of soft wearable actuators [115], yielding a high recovery rate of 96% [116]. In addition, the integration of SMA and SMP with multi-material printing [117] has resulted in a soft robotic hand, which was reported to work at 0.125 Hz without active cooling and capable of handling heavy objects up to 133 g [118]. Furthermore, SMAs may be more efficient and versatile in soft orthoses embedded with curvature sensors [119] and smart soft composites (SSC) [120].
Compliant mechanism
Compliant mechanisms (CMs) comprise a type of mechanical mechanism that can deform owing to flexible parts [121], which—compared to their traditional rigid counterparts—have certain advantages in terms of fewer parts, reduced weight and cost, lower friction, and lower maintenance costs [122, 123]. Recently, with the ongoing development of AM and material science, great advancements have been made in this field. CMs have the potential to be utilized in hand orthoses; they contribute to compliant joints and actuators to produce counterforces, in order to decrease tremors and design vibration absorption mechanisms. A compliant actuator was fabricated via AM with polypropylene (PP) to passively suppress hand tremors based on friction [124]. In 2017, Choi et al. proposed a 3D-printed compliant finger with an embedded pressure sensor that is lightweight and inexpensive [125]. Recently, an innovative, compliant wrist joint (Fig. 6a) with the ability to undertake ulnar/radial and flexion/extension has been fabricated via 3D printing [96]. Researchers have proposed various compliant mechanisms as attenuators of vibration at known low frequencies [126, 127].
Bistable compliant mechanisms (BCMs) are a special type of CM that can achieve two stable states via the energy stored in their flexures [128]. They have been utilized in different fields, such as switches, closure valves, or circuit breakers [129]. Some hand orthoses, such as SJS [52], operate in both the OFF and ON state, and these BCMs can be utilized as monolithic light switches to shift between states. A BCM with stiff and compliant states has been designed, which can move in linear (Fig. 7a) and circular (Fig. 7b) motions (capable of controlling different types of tremors) while in the compliant state [130]. In addition, in a compliant state, motion can be achieved with near-zero stiffness. Therefore, this mechanism does not affect voluntary motion, and when a tremor occurs, it switches to a stiff state to suppress the tremor.

BCM with linear and circular motion: a linear BCM mechanism and its application to control flexion/extension tremors; b circular BCM mechanism and its application to control ulnar/radial tremors

Variable stiffness material strategies to suppress tremors: a Schematic view of friction damper mechanism using a variable stiffness material; b schematic view of the mass–spring–damper mechanism using a variable stiffness material; c friction damper orthosis concept; d mass–spring–damper orthosis concept
Electro-responsive actuators
Electro-responsive actuators, such as dielectric elastomers and piezoelectrics, are electrical-responsive materials that have attracted significant attention because of their low weight and flexibility. The successful integration of piezoelectric actuators and sensors to suppress hand tremors has been reported [58]. 3D-printed piezoelectric actuators have shown promising results and can be utilized in micro applications [131,132,133]. Dielectric elastomer actuators (DEA) have also shown great capability to suppress PD hand tremors [63]. Furthermore, there have been successful reports of 3D-printed DEA [134, 135], with up to 9% actuation strain and a breakdown voltage of about 25 Vµm−1 (Fig. 6b) [97]. DEA has also been utilized for vibration damping purposes to suppress high-frequency vibrations with 10–15 dB efficiency, suitable for tremor vibration suppression [136].
Laminar jamming structures
Jamming structures have variable stiffnesses and are typically made of particles, stacked layers, or axially oriented fibers enclosed in an envelope. Recently developed laminar soft actuators have been utilized in hand tremor suppressors due to their ability to mitigate hand tremors both in the wrist [52] and fingers [53]. Various materials, such as paper, elastomers, polyester films, and sandpaper, have been studied as laminar structures to obtain the desired stiffness. Recently, AM was used to fabricate geometrical shapes of envelopes and layers with a complex inner shape via multi-material 3D printing, which are both lightweight and flexible [137, 138]. A tendon-driven finger integrated with laminar jamming made of Dura-Lar film has also been produced via 3D printing, and the results confirmed its high load capacity for an effective vibration attenuator in hand tremors [139].
Magneto-responsive actuator
Magneto-responsive materials, such as magnetorheological (MR) materials, have also shown good efficiency in attenuating tremors in the upper limb in tremor orthoses [49, 50]. The MR fluid has tunable stiffness when exposed to a magnetic field. Recently, the advancement of AM has made fabricating complex shapes and distributed MR structures more feasible [140]. Studies have shown the different damping characteristics of such materials under various magnetic fields in a wide frequency range [141]. A soft beam with tunable stiffness has been developed with an MR fluid embedded in a polyurethane body with a functionally graded design of the MR material [142]. The magnetic field intensity and direction can affect the beam stiffness, and experiments showed a 23% increase in beam stiffness along with higher MR density. Furthermore, 3D-printed MR polymers (MRPs) exhibited different levels of stiffness, shape memory, and thermal healing properties [143].
Variable stiffness materials like MR fluids can be utilized as tremor suppressors in two different settings: (1) a friction-based mechanism (Fig. 8c) and (2) a spring–mass mechanism (Fig. 8d). In friction-based mechanisms, the orthosis connects tremulous parts of the body to non-shaking parts via beams (e.g., in suppressing wrist tremors, the orthosis connects the hand to the forearm) that can move via the variable stiffness fluid; e.g., the Steadiwear glove uses dilatant fluid to mitigate wrist flexion/extension tremor [42]. In this mechanism, tuned friction can eliminate tremors due to the tremor amplitude usually being smaller than the voluntary motion amplitude. In the spring–mass mechanism, a variable stiffness structure can be utilized as a variable stiffness spring, and its stiffness can be tuned to change the natural frequency of the mass–spring to the tremor frequency.
Discussion
Various types of hand tremor-suppression orthoses with passive, semi-active, or active mechanisms have been created to help people with upper limb tremors all over the world. These devices were designed to suppress different types of tremors, such as rest or action tremors in the shoulder, elbow, wrist, and finger joints. The noninvasive, low-cost, and high-performance nature of hand tremor orthoses has made them a practical solution for treating tremors in diseases like PD and ET. Three main strategies have been exploited to mitigate the tremor force in the devices discussed in this paper: (1) friction; (2) mass–spring–damper; and (3) active force. Friction is a passive way to decrease the tremor amplitude. In most patients, the amplitude of the tremor force is relatively small compared to that of voluntary forces. Therefore, a small friction force is a simple way to deal with tremors. However, friction affects voluntary motion; therefore, in some orthoses, a controller deactivates the friction during tremor-free intervals [48]. The tuned mass–spring–damper system is one of the most common strategies to absorb vibration in various fields, and has also been exploited in hand tremor devices. Because of the seismic mass in the mass–spring–damper system, these kinds of orthoses can be heavy. Even though the added mass can have a smaller size, theoretically, the small mass leads to a wide range of motions, which makes the orthosis bulky. Therefore, there should be a trade-off between the mass and volume of the orthosis.
Moreover, mass–spring–damper systems are not suitable for simultaneous use in different types of tremor with different directions because there will be separate seismic masses that are intolerable for patients. In an ideal mass–spring–damper system, the total tremor energy transforms into mass, and it applies a force equal to the tremor force to the limb, which suppresses the tremor. In the active force strategy, researchers analyze the hand tremor signals, extract their characteristics, and then generate and apply a counterforce with different actuators to cope with the tremor. However, most active orthoses use a motor and pump to generate counterforces requiring a high-power energy source, which leads to the device being heavy. Similarly, using various motors or pumps to attenuate tremors in different directions is a challenge that is addressed using the MMS mechanism [56]. Furthermore, using rigid parts for wearable devices is a disadvantage that is overcome by utilizing soft actuators [58, 60].
Conventional tremor suppressors are fabricated using heavy and rigid actuators; however, with the recent advancement of soft actuators, there have been significant developments in hand orthosis design and efficiency. In addition, the latest advances in AM and material science have provided a great opportunity to utilize smart materials in orthoses and fabricate them in complex shapes and structures. Various types of upper limb tremor mitigators have been developed by the AM of soft actuators, including pneumatics, hydraulics, SMAs, SMPs, CMs, electro-responsive structures, laminar jamming structures, and magneto-responsive mitigators. Although soft actuators like pneumatic, hydraulic, and laminar jamming actuators have a relatively high efficiency, they require heavy or bulky external equipment, such as pumps, which are not suitable for wearable devices. On the other hand, SMM actuators can be utilized in compact and lightweight applications because they are able to generate enough counterforce to attenuate the tremor force. However, these actuators are not rapid enough to change the direction of the counterforce in response to proper stimuli. In this regard, electro-responsive and magneto-responsive variable stiffness materials can be exploited in friction-based tremor-suppression orthoses. Despite their effects on the voluntary motion of the arm and hand, they can still be manufactured with an appropriate size and weight to effectively suppress tremors. Moreover, various integrated sensors, such as accelerometers, displacement sensors, EMG sensors, and electromyography sensors, which have been tested as tremor suppressors, have been explored. Despite that the size of most of the fabricated prototypes of these sensors is larger than commercialized accelerometers, their production cost and time using AM are superior to those of other fabrication methods.
During the design and fabrication of hand tremor suppressors, rigid actuators and motors have been utilized to transform and apply a counterforce to decrease the tremor amplitude, mainly because of their ease of analysis, design, and control. However, these actuators make the device heavy, rigid and difficult to wear, and they typically have a limited DOF that cannot manage complex arm and hand motions. These limitations have led researchers to move towards soft actuators that are lightweight and more flexible; however, analyzing actuator motion in such actuators is more complex due to their DOFs. Recent powerful computers and analysis methods, such as various machine learning (ML) algorithms [144, 145] and finite element analysis techniques [146, 147], have provided researchers with new tools to analyze and design soft actuators. Furthermore, via AM, soft actuators with complex structures could be fabricated to generate the desired force transformations and stiffnesses in different states. In all of the fabricated hand tremor devices to date, sensors and actuators are separate elements that make the devices bulkier, heavier, and requiring final assembly, which can increase the product size, weight, and cost. However, with recent developments in 3D and 4D printing methods, sensors and actuators could be fabricated simultaneously in a monolithic structure that could significantly decrease the device volume.
The high DOFs of soft actuators distinguish them from rigid actuators; as such, significant research attention has been paid to designing an appropriate control strategy for these actuators. In the controller design for soft actuators, besides actuator application, the geometrical shape and structure are the key factors to be considered. As soft actuators are difficult to analyze due to their high flexibility, model-free controllers such as ML techniques have been developed. These controllers can calculate the precise movement by utilizing a few sensors in rigid actuators. However, for such actuators to precisely locate the position of sensors, there should be a network of sensors distributed around the actuator to obtain enough data.
In active and semi-active orthoses, there is a need for compact, high-energy–density, and long-lasting power sources to produce a portable, lightweight, and reliable hand tremor suppressor. The lack of a high-energy–density power source has been a major obstacle of developing portable motor-driven orthoses or pressure-activated actuators, such as pneumatic or hydraulic actuators; such devices have high power demand to suppress tremors. In addition, orthoses are in contact with the human body; hence, these power sources should meet high safety standards. Electro-active actuators, such as dielectric elastomers and piezoelectrics, will be actuated in the presence of high voltage, which should be isolated safely to prevent any undesired effect on the patients’ bodies. Furthermore, due to the low voltage output of common power sources, it is necessary to produce safe and compact low-voltage to high-voltage converters in electro-active actuators. Therefore, devising and developing safe, compact, high-power-density power sources is a dominating factor in designing hand tremor orthoses.
Although various hand tremor suppressors have been developed in recent decades, patient acceptance has been poor due to their drawbacks, such as bulky shape and large weight; therefore, the challenges in developing a high-demand, practical, compact, and compliant hand orthosis are still present. We believe that, with the recent developments in AM and advancements in soft actuator design and control discussed in this work, customized 3D-printed tremor orthoses with the characteristics of low weight, compact size, flexibility, smart features, and high efficiency can be further designed to attenuate tremors.
Conclusions
Tremors can lead to difficulty in pursuing normal daily activities and cause depression in patients. Studies have shown that various types of tremor-suppression orthoses are capable of decreasing tremors. In this paper, passive, semi-active, and active mechanisms for tremor suppression were reviewed. Active devices could support voluntary motion and suppress tremors at the same time, but they usually have motors and pumps that make them heavy and bulky, and they also require external power sources. On the other hand, passive orthoses are simple, low-cost, and lightweight, while they can affect voluntary movements. Semi-active devices automatically tune to the frequency of tremors and do not have any effect on arm movements during tremor-free intervals. However, patient concerns still remain due to the bulkiness and large weight of such mechanisms resulting from separate sensors, actuators, and controller units designed for these orthoses. This paper revealed that the fabrication of customized, complex-shaped, multi-material orthoses, and prostheses can be realized with the recent advancements in AM and improvements in smart materials. In addition, it was discussed how the integration of 3D/4D printing, smart material science, and their modeling and embodiment control features could be used to make more efficient and comfortable tremor-suppressing devices.
References
Puschmann A, Wszolek ZK (2011) Diagnosis and treatment of common forms of tremor. Semin Neurol 31(1):65–77. https://doi.org/10.1055/s-0031-1271312
Marsden CD (1984) Origins of normal and pathological tremor. In: Findley LJ, Capildeo R (eds) Movement disorders: Tremor. Palgrave Macmillan, London, pp 37–84
Rana AQ, Chou KL (2015) What is tremor? In: Rana AQ, Chou KL (eds) Essential tremor in clinical practice. Springer, Cham, pp 1–7
Ruonala V, Meigal A, Rissanen SM et al (2014) EMG signal morphology and kinematic parameters in essential tremor and parkinson’s disease patients. J Electromyogr Kinesiol 24(2):300–306. https://doi.org/10.1016/j.jelekin.2013.12.007
O’connor RJ, Kini MU (2011) Non-pharmacological and non-surgical interventions for tremor: a systematic review. Parkinsonism Relat Disord 17(7):509–515. https://doi.org/10.1016/j.parkreldis.2010.12.016
Hariz MI, Rehncrona S, Quinn NP et al (2008) Multicenter study on deep brain stimulation in parkinson’s disease: an independent assessment of reported adverse events at 4 years. Mov Disord 23(3):416–421. https://doi.org/10.1002/mds.21888
Thenganatt MA, Louis ED (2012) Distinguishing essential tremor from parkinson’s disease: bedside tests and laboratory evaluations. Expert Rev Neurother 12(6):687–696. https://doi.org/10.1586/ern.12.49
Elble R, Comella C, Fahn S et al (2012) Reliability of a new scale for essential tremor. Mov Disord 27(12):1567–1569. https://doi.org/10.1002/mds.25162
Zimmermann R, Deuschl G, Hornig A et al (1994) Tremors in parkinson’s disease: symptom analysis and rating. Clin Neuropharmacol 17(4):303–314
Crawford P, Zimmerman EE (2018) Tremor: sorting through the differential diagnosis. Am Fam Physician 97(3):180–186
Bhidayasiri R (2005) Differential diagnosis of common tremor syndromes. Postgrad Med J 81(962):756–762. https://doi.org/10.1136/pgmj.2005.032979
Brennan KC, Jurewicz EC, Ford B et al (2002) Is essential tremor predominantly a kinetic or a postural tremor? A clinical and electrophysiological study. Mov Disord 17(2):313–316. https://doi.org/10.1002/mds.10003
Henderson JM, Yiannikas C, Morris JG et al (1994) Postural tremor of parkinson’s disease. Clin Neuropharmacol 17(3):277–285. https://doi.org/10.1097/00002826-199406000-00007
Pigg AC, Thompson-Westra J, Mente K et al (2020) Distribution of tremor among the major degrees of freedom of the upper limb in subjects with essential tremor. Clin Neurophysiol 131(11):2700–2712. https://doi.org/10.1016/j.clinph.2020.08.010
Geiger DW, Eggett DL, Charles SK (2018) A method for characterizing essential tremor from the shoulder to the wrist. Clin Biomech (Bristol, Avon) 52:117–123. https://doi.org/10.1016/j.clinbiomech.2017.12.003
Shanker V (2019) Essential tremor: diagnosis and management. BMJ. https://doi.org/10.1136/bmj.l4485
Sasso E, Perucca E, Fava R et al (1990) Primidone in the long-term treatment of essential tremor: a prospective study with computerized quantitative analysis. Clin Neuropharmacol 13(1):67–76. https://doi.org/10.1097/00002826-199002000-00007
Zappia M, Albanese A, Bruno E et al (2013) Treatment of essential tremor: a systematic review of evidence and recommendations from the italian movement disorders association. J Neurol 260(3):714–740. https://doi.org/10.1007/s00415-012-6628-x
Li C, Gajic-Veljanoski O, Schaink AK et al (2019) Cost-effectiveness of magnetic resonance-guided focused ultrasound for essential tremor. Mov Disord 34(5):735–743. https://doi.org/10.1002/mds.27587
Armstrong MJ, Okun MS (2020) Diagnosis and treatment of parkinson disease: a review. JAMA 323(6):548–560. https://doi.org/10.1001/jama.2019.22360
Poewe W, Antonini A, Zijlmans JC et al (2010) Levodopa in the treatment of parkinson’s disease: an old drug still going strong. Clin Interv Aging 5:229–238. https://doi.org/10.2147/cia.s6456
Cury RG, Fraix V, Castrioto A et al (2017) Thalamic deep brain stimulation for tremor in parkinson disease, essential tremor, and dystonia. Neurology 89(13):1416–1423. https://doi.org/10.1212/WNL.0000000000004295
Baizabal-Carvallo JF, Kagnoff MN, Jimenez-Shahed J et al (2014) The safety and efficacy of thalamic deep brain stimulation in essential tremor: 10 years and beyond. J Neurol Neurosurg Psychiatry 85(5):567–572. https://doi.org/10.1136/jnnp-2013-304943
Elias WJ, Huss D, Voss T et al (2013) A pilot study of focused ultrasound thalamotomy for essential tremor. N Engl J Med 369(7):640–648. https://doi.org/10.1056/NEJMoa1300962
Bond AE, Shah BB, Huss DS et al (2017) Safety and efficacy of focused ultrasound thalamotomy for patients with medication-refractory, tremor-dominant parkinson disease: a randomized clinical trial. JAMA Neurol 74(12):1412–1418. https://doi.org/10.1001/jamaneurol.2017.3098
Elias WJ, Lipsman N, Ondo WG et al (2016) A randomized trial of focused ultrasound thalamotomy for essential tremor. N Engl J Med 375(8):730–739. https://doi.org/10.1056/NEJMoa1600159
Meshack RP, Norman KE (2002) A randomized controlled trial of the effects of weights on amplitude and frequency of postural hand tremor in people with parkinson’s disease. Clin Rehabil 16(5):481–492. https://doi.org/10.1191/0269215502cr521oa
Cooper C, Evidente VG, Hentz JG et al (2000) The effect of temperature on hand function in patients with tremor. J Hand Ther 13(4):276–288. https://doi.org/10.1016/s0894-1130(00)80019-8
Feys P, Helsen W, Liu X et al (2005) Effects of peripheral cooling on intention tremor in multiple sclerosis. J Neurol Neurosurg Psychiatry 76(3):373–379. https://doi.org/10.1136/jnnp.2004.044305
Abramavicius S, Venslauskas M, Vaitkus A et al (2020) Local vibrational therapy for essential tremor reduction: a clinical study. Medicina (Kaunas) 56(10):552. https://doi.org/10.3390/medicina56100552
Lora-Millan JS, Lopez-Blanco R, Gallego JA et al (2019) Mechanical vibration does not systematically reduce the tremor in essential tremor patients. Sci Rep 9(1):16476. https://doi.org/10.1038/s41598-019-52988-8
Pathak A, Redmond JA, Allen M et al (2014) A noninvasive handheld assistive device to accommodate essential tremor: a pilot study. Mov Disord 29(6):838–842. https://doi.org/10.1002/mds.25796
Marquez-Chin C, Popovic MR (2020) Functional electrical stimulation therapy for restoration of motor function after spinal cord injury and stroke: a review. Biomed Eng Online 19(1):34. https://doi.org/10.1186/s12938-020-00773-4
Jitkritsadakul O, Thanawattano C, Anan C et al (2017) Tremor’s glove-an innovative electrical muscle stimulation therapy for intractable tremor in parkinson’s disease: a randomized sham-controlled trial. J Neurol Sci 381:331–340. https://doi.org/10.1016/j.jns.2017.08.3246
Martin R, Sadowsky C, Obst K et al (2012) Functional electrical stimulation in spinal cord injury: from theory to practice. Top Spinal Cord Inj Rehabil 18(1):28–33. https://doi.org/10.1310/sci1801-28
Kotovsky J, Rosen MJ (1998) A wearable tremor-suppression orthosis. J Rehabil Res Dev 35(4):373–387
Hashemi SM, Golnaraghi MF, Patla AE (2004) Tuned vibration absorber for suppression of rest tremor in parkinson’s disease. Med Biol Eng Comput 42(1):61–70. https://doi.org/10.1007/BF02351012
Rudraraju S, Nguyen T (2018) Wearable tremor reduction device (TRD) for human hands and arms in Frontiers in Biomedical Devices, 2018, vol. 40789. American Society of Mechanical Engineers, p. V001T10A010
Buki E, Katz R, Zacksenhouse M et al (2018) Vib-bracelet: a passive absorber for attenuating forearm tremor. Med Biol Eng Comput 56(5):923–930. https://doi.org/10.1007/s11517-017-1742-7
Masoumi MM (2018) Passive hand tremor attenuator : magnetic spring, MASTER Text, (Mechanical Engineering, University of British Columbia Library. https://open.library.ubc.ca/collections/24/items/1.0368769
Fromme NP, Camenzind M, Riener R et al (2020) Design of a lightweight passive orthosis for tremor suppression. J Neuroeng Rehabil 17(1):47. https://doi.org/10.1186/s12984-020-00673-7
Mark Elias TCSP (2017) Toronto (CA) ; Emile Maamary, Toronto (CA) ; Leonardo Araneta, Toronto ( CA ) ; Numaira Obaid , Mississauga ( CA ) Apparatus for damping involuntary hand motions," United States Patent Appl. US 2017 / 0290698 A1
Sampalli DLJA, Rizek P (2020) Clinical and kinematic assessment of a glove-based tremor dampener in patients with essential tremor. Int Parkinson Mov Disorder Soc 35:S1 35
Takanokura M, Sugahara R, Miyake N, Ishiguro K, Muto T, Sakamoto K (2011) Upper-limb orthoses implemented with air dashpots for suppression of pathological tremor in daily activities. In: ISB Conference July 2011. Brussel: Free University of Brussels, pp 3–4
Lu Z, Huang Z (2021) Analytical and experimental studies on particle damper used for tremor suppression. J Vib Contr 27(23–24):2887–2897. https://doi.org/10.1177/1077546320969469
Zulkefli A, Muthalif A, Nordin NHD et al (2019) Intelligent glove for suppression of resting tremor in Parkinson’s disease. Vibroeng Proc 29:176–181. https://doi.org/10.21595/vp.2019.21078
Sun JQ, Jolly MR, Norris MA (1995) Passive, adaptive and active tuned vibration absorbers - a survey. J Mech Des 117:234–242. https://doi.org/10.1115/1.2836462
Herrnstadt G, Menon C (2013) On-off tremor suppression orthosis with electromagnetic brake. Int J Mech Eng Mech 1(2):7–14. https://doi.org/10.11159/ijmem.2013.002
Loureiro RCV, Belda-Lois JM, Lima ER, et al (2005) Upper limb tremor suppression in adl via an orthosis incorporating a controllable double viscous beam actuator. In: 9th international conference on rehabilitation robotics, pp 119–122. https://doi.org/10.1109/ICORR.2005.1501065
Zahedi A, Zhang B, Yi A et al (2021) A soft exoskeleton for tremor suppression equipped with flexible semiactive actuator. Soft Robot 8(4):432–447. https://doi.org/10.1089/soro.2019.0194
Teixeira CJ, Bicho E, Rocha LA, et al (2013) A self-tunable dynamic vibration absorber: Parkinson’s disease’s tremor suppression. In: 2013 IEEE 3rd Portuguese meeting in bioengineering (ENBENG), IEEE, pp 1–6
Narang YS, Aktas B, Ornellas S et al (2020) Lightweight highly tunable jamming-based composites. Soft Robot 7(6):724–735. https://doi.org/10.1089/soro.2019.0053
Awantha WVI, Wanasinghe AT, Kavindya AGP, et al (2020) A novel soft glove for hand tremor suppression: evaluation of layer jamming actuator placement. In: 3rd IEEE international conference on soft robotics (Robosoft), pp 440–445
Rocon E, Ruiz A, Pons JL, et al (2005) Rehabilitation robotics: a wearable exo-skeleton for tremor assessment and suppression. In: IEEE international conference on robotics and automation, pp 2271–2276. https://doi.org/10.1109/ROBOT.2005.1570451
Rocon E, Belda-Lois JM, Ruiz AF et al (2007) Design and validation of a rehabilitation robotic exoskeleton for tremor assessment and suppression. IEEE Trans Neur Syst Rehabil Eng 15(3):367–378. https://doi.org/10.1109/TNSRE.2007.903917
Zhou Y, Naish MD, Jenkins ME et al (2017) Design and validation of a novel mechatronic transmission system for a wearable tremor suppression device. Robot Auton Syst 91:38–48. https://doi.org/10.1016/j.robot.2016.12.009
Herrnstadt G, Mckeown MJ, Menon C (2019) Controlling a motorized orthosis to follow elbow volitional movement: tests with individuals with pathological tremor. J Neuroeng Rehabil 16(1):23. https://doi.org/10.1186/s12984-019-0484-1
Hosseini SM, Kalhori H, Al-Jumaily A (2021) Active vibration control in human forearm model using paired piezoelectric sensor and actuator. J Vib Contr 27(19–20):2231–2242. https://doi.org/10.1177/1077546320957533
Zamanian AH, Richer E (2019) Adaptive notch filter for pathological tremor suppression using permanent magnet linear motor. Mechatronics. https://doi.org/10.1016/j.mechatronics.2019.102273
Wirekoh J, Parody N, Riviere CN et al (2021) Design of fiber-reinforced soft bending pneumatic artificial muscles for wearable tremor suppression devices. Smart Mater Struct 30(1):015013. https://doi.org/10.1088/1361-665X/abc062
Skaramagkas V, Andrikopoulos G, Manesis S (2021) Towards essential hand tremor suppression via pneumatic artificial muscles. Actuators 10(9):206. https://doi.org/10.3390/act10090206
Hosseini SM (2019) Tremor suppression in the human hand and forearm. UTS Digital Theses Collection.
Kelley CR, Kauffman JL (2021) Towards wearable tremor suppression using dielectric elastomer stack actuators. Smart Mater Struct 30(2):025006. https://doi.org/10.1088/1361-665X/abccdc
Gul JZ, Sajid M, Rehman MM et al (2018) 3d printing for soft robotics - a review. Sci Technol Adv Mat 19(1):243–262. https://doi.org/10.1080/14686996.2018.1431862
Zolfagharian A, Kouzani AZ, Khoo SY et al (2016) Evolution of 3d printed soft actuators. Sensor Actuat A Phys 250:258–272. https://doi.org/10.1016/j.sna.2016.09.028
Zolfagharian A, Kaynak A, Kouzani A (2020) Closed-loop 4D-printed soft robots. Mater Des 188:108411. https://doi.org/10.1016/j.matdes.2019.108411
Chen YY, Zhang M, Sun YN et al (2022) Improving 3D/4D printing characteristics of natural food gels by novel additives: a review. Food Hydrocolloid. https://doi.org/10.1016/j.foodhyd.2021.107160
Koo JH, Jeong S, Shim HJ et al (2017) Wearable electrocardiogram monitor using carbon nanotube electronics and color-tunable organic light-emitting diodes. ACS Nano 11(10):10032–10041. https://doi.org/10.1021/acsnano.7b04292
Xu BX, Akhtar A, Liu YH et al (2016) An epidermal stimulation and sensing platform for sensorimotor prosthetic control, management of lower back exertion, and electrical muscle activation. Adv Mater 28(22):4462. https://doi.org/10.1002/adma.201504155
Hattori Y, Falgout L, Lee W et al (2014) Multifunctional skin-like electronics for quantitative, clinical monitoring of cutaneous wound healing. Adv Healthc Mater 3(10):1597–1607. https://doi.org/10.1002/adhm.201400073
Chun KY, Son YJ, Jeon ES et al (2018) A self-powered sensor mimicking slow- and fast-adapting cutaneous mechanoreceptors. Adv Mater. https://doi.org/10.1002/adma.201706299
Ren X, Pei K, Peng B et al (2016) A low-operating-power and flexible active-matrix organic-transistor temperature-sensor array. Adv Mater 28(24):4832–4838. https://doi.org/10.1002/adma.201600040
Yamada T, Hayamizu Y, Yamamoto Y et al (2011) A stretchable carbon nanotube strain sensor for human-motion detection. Nat Nanotechnol 6(5):296–301. https://doi.org/10.1038/nnano.2011.36
Widjaja F et al (2008) Current progress on pathological tremor modeling and active compensation using functional electrical stimulation. In: ISG'08: the 6th conference of the international society for gerontechnology, pp 001-006
Nag A, Mukhopadhyay SC, Kosel J (2016) Flexible carbon nanotube nanocomposite sensor for multiple physiological parameter monitoring. Sensor Actuat A Phys 251:148–155. https://doi.org/10.1016/j.sna.2016.10.023
Acuautla M, Bernardini S, Gallais L et al (2014) Ozone flexible sensors fabricated by photolithography and laser ablation processes based on ZnO nanoparticles. Sensor Actuat B Chem 203:602–611. https://doi.org/10.1016/j.snb.2014.07.010
Woo SJ, Kong JH, Kim DG et al (2014) A thin all-elastomeric capacitive pressure sensor array based on micro-contact printed elastic conductors. J Mater Chem C 2(22):4415–4422. https://doi.org/10.1039/c4tc00392f
Muth JT, Vogt DM, Truby RL et al (2014) Embedded 3D printing of strain sensors within highly stretchable elastomers. Adv Mater 26(36):6307–6312. https://doi.org/10.1002/adma.201400334
Schouten M, Kosmas D, Krijnen G (2020) Hysteresis compensation of 3D printed sensors using a power law model for various input signals. In: 2020 IEEE sensors, 2020, pp 1–4
Xu YY, Wu XY, Guo X et al (2017) The boom in 3D-printed sensor technology. Sensors-Basel 17(5):1166. https://doi.org/10.3390/s17051166
Han T, Kundu S, Nag A et al (2019) 3d printed sensors for biomedical applications: a review. Sensors-Basel 19(7):1706. https://doi.org/10.3390/s19071706
Martelli N, Serrano C, Van Den Brink H et al (2016) Advantages and disadvantages of 3-dimensional printing in surgery: a systematic review. Surgery 159(6):1485–1500. https://doi.org/10.1016/j.surg.2015.12.017
Zheng YL, Huang X, Chen JL et al (2021) A review of conductive carbon materials for 3D printing: materials, technologies, properties, and applications. Materials 14(14):3911. https://doi.org/10.3390/ma14143911
Neumann TV, Dickey MD (2020) Liquid metal direct write and 3D printing: a review. Adv Mater Technol 5(9):2000070. https://doi.org/10.1002/admt.202000070
Macdonald E, Salas R, Espalin D et al (2014) 3D printing for the rapid prototyping of structural electronics. IEEE Access 2:234–242. https://doi.org/10.1109/Access.2014.2311810
Borghetti M, Serpelloni M, Sardini E et al (2016) Mechanical behavior of strain sensors based on PEDOT:PSS and silver nanoparticles inks deposited on polymer substrate by inkjet printing. Sensor Actuat A Phys 243:71–80. https://doi.org/10.1016/j.sna.2016.03.021
Wolterink G, Dias P, Sanders RGP et al (2020) Development of soft semg sensing structures using 3D-printing technologies dagger. Sensors-Basel 20(15):4292. https://doi.org/10.3390/s20154292
Rivadeneyra A, Fernandez-Salmeron J, Agudo-Acemel M et al (2015) Improved manufacturing process for printed cantilevers by using water removable sacrificial substrate. Sensor Actuat A Phys 235:171–181. https://doi.org/10.1016/j.sna.2015.10.019
Zega V, Credi C, Bernasconi R et al (2018) The first 3-D-printed z-axis accelerometers with differential capacitive sensing. IEEE Sens J 18(1):53–60. https://doi.org/10.1109/Jsen.2017.2768299
Liu GD, Yang WD, Wang CH et al (2021) A rapid fabrication approach for the capacitive accelerometer based on 3D printing and a silver particle-free ink. J Mater Sci Mater Electr 32(13):17901–17910. https://doi.org/10.1007/s10854-021-06326-2
Zhao MH, Jiang KL, Bai HW et al (2020) A MEMS based Fabry-Pérot accelerometer with high resolution. Microsyst Technol 26(6):1961–1969. https://doi.org/10.1007/s00542-020-04747-3
Liu M, Zhang Q, Zhao Y et al (2020) Design and development of a fully printed accelerometer with a carbon paste-based strain gauge. Sensors (Basel) 20(12):3395. https://doi.org/10.3390/s20123395
Arh M, Slavic J, Boltezar M (2021) Design principles for a single-process 3D-printed accelerometer—theory and experiment. Mech Syst Signal Pr 152:107475. https://doi.org/10.1016/j.ymssp.2020.107475
Zega V, Martinelli L, Casati R et al (2021) A 3D printed Ti6Al4V alloy uniaxial capacitive accelerometer. IEEE Sens J 21(18):19640–19646. https://doi.org/10.1109/Jsen.2021.3095760
Khamis H, Xia B, Redmond SJ (2019) A novel optical 3D force and displacement sensor—towards instrumenting the papillarray tactile sensor. Sensor Actuat A Phys 291:174–187. https://doi.org/10.1016/j.sna.2019.03.051
Deshpande P (2016) Tremor suppression with shape memory alloy vibration absorber. Masters Thesis. Mechanical Engineering, California State University, Fresno. http://hdl.handle.net/10211.3/185188
Jeong J, Hyeon K, Han J et al (2021) Wrist assisting soft wearable robot with stretchable coolant vessel integrated SMA muscle. IEEE/ASME Trans Mechatron 27(2):1046–1058. https://doi.org/10.1109/TMECH.2021.3078472
Polygerinos P, Wang Z, Galloway KC et al (2015) Soft robotic glove for combined assistance and at-home rehabilitation. Robot Auton Syst 73:135–143. https://doi.org/10.1016/j.robot.2014.08.014
Tiem JV, Groenesteijn J, Sanders R et al (2015) 3D printed bio-inspired angular acceleration sensor. IN: 2015 IEEE sensors. https://doi.org/10.1109/ICSENS.2015.7370543
Jerance N, Bednar N, Stojanovic G (2013) An ink-jet printed eddy current position sensor. Sensors-Basel 13(4):5205–5219. https://doi.org/10.3390/s130405205
Li B, Meng L, Wang H et al (2018) Rapid prototyping eddy current sensors using 3D printing. Rapid Prototyping J 24(1):106–113. https://doi.org/10.1108/rpj-07-2016-0117
Wolterink G, Sanders R, Muijzer F, et al (2017) 3D-printing soft sEMG sensing structures. In: 2017 IEEE Sensors, pp 205–207
Noritsugu T (2005) Pneumatic soft actuator for human assist technology. In: Symposium on fluid power
Polygerinos P, Galloway KC, Savage E, et al (2015) Soft robotic glove for hand rehabilitation and task specific training. In: IEEE international conference on robotics and automation, pp 2913–2919. https://doi.org/10.1109/ICRA.2015.7139597
Drotman D, Jadhav S, Karimi M ,et al (2017) 3D printed soft actuators for a legged robot capable of navigating unstructured terrain. In: IEEE international conference on robotics and automation, pp 5532–5538. https://doi.org/10.1109/ICRA.2017.7989652
Kalisky T, Wang YQ, Shih B, et al (2017) Differential pressure control of 3D printed soft fluidic actuators. In: IEEE international conference on intelligent robots and systems, pp 6207–6213. https://doi.org/10.1109/IROS.2017.8206523
Tawk C, Panhuis MIH, Spinks GM et al (2018) Bioinspired 3D printable soft vacuum actuators for locomotion robots, grippers and artificial muscles. Soft Robot 5(6):685–694. https://doi.org/10.1089/soro.2018.0021
Tawk C, Spinks GM, Alici G et al (2019) 3D printable linear soft vacuum actuators: their modeling, performance quantification and application in soft robotic systems. IEEE/ASME Trans Mech 24(5):2118–2129. https://doi.org/10.1109/Tmech.2019.2933027
Elgeneidy K, Neumann G, Jackson M et al (2018) Directly printable flexible strain sensors for bending and contact feedback of soft actuators. Front Robot Ai 5:2. https://doi.org/10.3389/frobt.2018.00002
Truby RL, Wehner M, Grosskopf AK et al (2018) Soft somatosensitive actuators via embedded 3D printing. Adv Mater 30(15):e1706383. https://doi.org/10.1002/adma.201706383
Konishi S, Hirata A (2019) Flexible temperature sensor integrated with soft pneumatic microactuators for functional microfingers. Sci Rep 9:15634. https://doi.org/10.1038/s41598-019-52022-x
Hainsworth T, Smith L, Alexander S et al (2020) A fabrication free, 3D printed, multi-material, self-sensing soft actuator. IEEE Robot Autom Lett 5(3):4118–4125. https://doi.org/10.1109/Lra.2020.2986760
Keneth ES, Lieberman R, Rednor M et al (2020) Multi-material 3D printed shape memory polymer with tunable melting and glass transition temperature activated by heat or light. Polymers-Basel 12(3):710. https://doi.org/10.3390/polym12030710
Cersoli T, Cresanto A, Herberger C et al (2021) 3D printed shape memory polymers produced via direct pellet extrusion. Micromachines-Basel 12(1):87. https://doi.org/10.3390/mi12010087
Akbari S, Sakhaei AH, Panjwani S et al (2019) Multimaterial 3D printed soft actuators powered by shape memory alloy wires. Sensor Actuat A Phys 290:177–189. https://doi.org/10.1016/j.sna.2019.03.015
Deng E, Tadesse Y (2021) A soft 3D-printed robotic hand actuated by coiled SMA. Actuators 10(1):6. https://doi.org/10.3390/act10010006
Ren ZJ, Zarepoor M, Huang XN et al (2021) Shape memory alloy (SMA) actuator with embedded liquid metal curvature sensor for closed-loop control. Front Robot AI 8:599650. https://doi.org/10.3389/frobt.2021.599650
Song SH, Lee JY, Rodrigue H et al (2016) 35 Hz shape memory alloy actuator with bending-twisting mode. Sci Rep 6:21118. https://doi.org/10.1038/srep21118
Ansola R, Vegueria E, Canales J et al (2007) A simple evolutionary topology optimization procedure for compliant mechanism design. Finite Elem Anal Des 44(1–2):53–62. https://doi.org/10.1016/j.finel.2007.09.002
Howell LL, Rao SS, Midha A (1994) Reliability-based optimal-design of a bistable compliant mechanism. J Mech Des 116(4):1115–1121. https://doi.org/10.1115/1.2919495
Howell LL (2013) Compliant mechanisms. In: 21st century kinematics. Springer, pp 189–216
Nambiar G (2020) Compliant mechanism in passive tremor suppression glove for Parkinson's patients. Master, Design and Engineering, Politecnico di Milano, Italy
Choi KY, Akhtar A, Bretl T (2017) A compliant four-bar linkage mechanism that makes the fingers of a prosthetic hand more impact resistant. In: IEEE international conference on robotics and automation, pp 6694–6699. https://doi.org/10.1109/ICRA.2017.7989791
Bilancia P, Baggetta M, Berselli G et al (2021) Design of a bio-inspired contact-aided compliant wrist. Robot Cim-Int Manuf 67:102028. https://doi.org/10.1016/j.rcim.2020.102028
Vijayan V, Thangavelu K (2009) Design and analysis of compliant mechanism for active vibration Isolation using FEA Technique. Int J Recent Trends Eng 1(5):77
Lawande SS, Bhattu A (2018) Replacement of vehicle suspension system with compliant mechanism. Amity J Comput Sci 2(1):4–10
Opdahl PG, Jensen B, Howell L (1998) An investigation into compliant bistable mechanisms. Des Eng Tech Conf. https://doi.org/10.1115/DETC98/MECH-5914
Jagtap S, Deshmukh B (1969) Pardeshi S (2021) Applications of compliant mechanism in today’s world: a review. J Phys Conf Ser 1:012013
Kuppens PR, Bessa MA, Herder JL et al (2021) Monolithic binary stiffness building blocks for mechanical digital machines. Extreme Mech Lett 42:101120. https://doi.org/10.1016/j.eml.2020.101120
Kim K, Zhu W, Qu X et al (2014) 3D optical printing of piezoelectric nanoparticle - polymer composite materials. ACS Nano 8(10):9799–9806. https://doi.org/10.1021/nn503268f
Pabst O, Holzer S, Beckert E et al (2014) Inkjet printed micropump actuator based on piezoelectric polymers: device performance and morphology studies. Org Electron 15(11):3306–3315. https://doi.org/10.1016/j.orgel.2014.09.007
Ferrara-Bello CA, Sandoval-Reyes JO, Vargas-Chable P, et al (2019) Design and 3D printed implementation of a microgripper actuated by a piezoelectric stack. In: International conference on mechatronics, electronics and automotive engineering, pp 62–67. https://doi.org/10.1109/Icmeae.2019.00019
Rossiter J, Walters P, Stoimenov B (2009) Printing 3D dielectric elastomer actuators for soft robotics (SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring)
Haghiashtiani G, Habtour E, Park SH et al (2018) 3D printed electrically-driven soft actuators. Extreme Mech Lett 21:1–8. https://doi.org/10.1016/j.eml.2018.02.002
Chortos A, Hajiesmaili E, Morales J et al (2020) 3D printing of interdigitated dielectric elastomer actuators. Adv Funct Mater 30(1):1907375. https://doi.org/10.1002/adfm.201907375
Kajiwara I, Kitabatake S, Hosoya N et al (2019) Design of dielectric elastomer actuators for vibration control at high frequencies. Int J Mech Sci 157:849–857. https://doi.org/10.1016/j.ijmecsci.2019.05.019
Zhu MZ, Mori Y, Wakayama T et al (2019) A fully multi-material three-dimensional printed soft gripper with variable stiffness for robust grasping. Soft Robot 6(4):507–519. https://doi.org/10.1089/soro.2018.0112
Elgeneidy K, Lightbody P, Pearson S, et al (2019) Characterising 3D-printed soft fin ray robotic fingers with layer jamming capability for delicate grasping. In: 2nd IEEE international conference on soft robotics, pp 143–148
Gao Y, Huang X, Mann IS et al (2020) A novel variable stiffness compliant robotic gripper based on layer jamming. J Mech Robot. https://doi.org/10.1115/1.4047156
Bastola AK, Paudel M, Li L (2018) Development of hybrid magnetorheological elastomers by 3D printing. Polymer 149:213–228. https://doi.org/10.1016/j.polymer.2018.06.076
Bastola AK, Paudel M, Li L (2017) 3D printed magnetorheological elastomers. ASME Conf Smart Mater Adapt Struct Intell Syst. https://doi.org/10.1115/SMASIS2017-3732
Hong SW, Yoon JY, Kim SH et al (2019) 3D-printed soft structure of polyurethane and magnetorheological fluid: a proof-of-concept investigation of its stiffness tunability. Micromachines-Basel 10(10):655. https://doi.org/10.3390/mi10100655
Qi S, Fu J, Xie YP et al (2019) Versatile magnetorheological plastomer with 3D printability, switchable mechanics, shape memory, and self-healing capacity. Compos Sci Technol. https://doi.org/10.1016/j.compscitech.2019.107817
Truby RL, Della Santina C, Rus D (2020) Distributed proprioception of 3D configuration in soft, sensorized robots via deep learning. IEEE Robot Autom Lett 5(2):3299–3306. https://doi.org/10.1109/Lra.2020.2976320
Xiao H, Wu JD, Ye WJ, et al (2020) Dynamic modeling for dielectric elastomer actuators based on LSTM deep neural network. In: 5th international conference on advanced robotics and mechatronics, pp 119–124. https://doi.org/10.1109/ICARM49381.2020.9195369
Xue XQ, Zhan ZH, Cai YW et al (2019) Design and finite element analysis of fiber-reinforced soft pneumatic actuator. Lect Notes Artif Int 11740:641–651. https://doi.org/10.1007/978-3-030-27526-6_56
Xavier MS, Fleming AJ, Yong YK (2021) Finite element modeling of soft fluidic actuators: overview and recent developments. Adv Intell Syst-Ger 3(2):2000187. https://doi.org/10.1002/aisy.202000187
Acknowledgements
The authors thank Faculty of Science, Engineering and Built Environment, Deakin University, for 2021 Mini ARC Analog Program (MAAP)—Discovery 253101, for financial support.
Funding
Open Access funding enabled and organized by CAUL and its Member Institutions.
Author information
Authors and Affiliations
Contributions
MM and AZ were involved in conceptualization, writing—original draft, and visualization; AZ, MB, YX, and AZK helped in supervision, funding acquisition, and writing—review & editing.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Ethical approval
This article does not contain any studies with human or animal subjects performed by any of the authors.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Mohammadi, M., Zolfagharian, A., Bodaghi, M. et al. 4D printing of soft orthoses for tremor suppression. Bio-des. Manuf. 5, 786–807 (2022). https://doi.org/10.1007/s42242-022-00199-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42242-022-00199-y