
Abstract
In order to systematically evaluate the damage degree in Jinping deep tunnels during excavation, an improved SPH algorithm with good Lagrangian characteristics is introduced. By modifying the derivative of the traditional SPH kernel functions, the brittle failure processes of particles are realized. The ‘Fissure Searching Generating Method’ (FSGM) has also been used to determine the establishment of joints and the tunnel excavation parts. Based on the Jinping tunnel engineering practices, numerical models are set up, and the damage degrees of the tunnel excavation under different buried depths, joint distances, positions and inclination angles are numerically simulated, and compared with the engineering site pictures to verify the rationality. (1) Typical “V” shaped shear failure zones are observed when no joints exist in the model, and the damage degree increases with the increasing tunnel buried depth. (2) The increase of joint-tunnel distance causes the damage degree to decrease, and the failure modes between the tunnel and the joint transform from tensile to shear failure. (3) The stability of the tunnel is less affected when the joint appears in the vault, north and south arch shoulder, but the tunnel is prone to becoming unstable when the joint appears in the north and south walls. (4) Steep and gentle dips of the joints greatly influence the excavation stability of the tunnel, while the excavation damage range becomes the smallest when the joint inclination angle is 45°. (5) The improved method can be well applied to predict and evaluate surrounding rock damage in Jinping tunnels.
Highlights
-
A mesh less numerical method with good Lagrangian characteristics is introduced, which can be applied to the modeling of rock fracture modeling.
-
The Fissure Searching Generating Method’ (FSGM) has been used to realize the establishment of joints and tunnel excavation.
-
The excavation Jinping deep tunnels is taken as the engineering background and several conditions are numerically simulated, which is consistent with the engineering practice.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Rock often experiences complex stress states under natural conditions (especially in deep rock engineering). Excavation and unloading of rock masses break the original stress balance, leading to the re-distributions of the stress field, and then forming excavation damage zones (EDZ). The study of rock excavation damage originated from underground rock fracture laboratory established by European and American countries for nuclear waste storage. Consequently, several famous laboratories have been built, for example, the URL by the AECL (Carlson et al. 1993; Potyondy et al. 1998; Read et al. 2004; Martin et al. 1993; Fairhurst et al. 2004), the HRL by the Swedish Nuclear Waste Disposal Company SKB (Stanfors et al. 1999) and the Yucca Mountain Laboratory by the United States (Hsiung et al. 2005). All of these laboratories have contributed significant research about rock mass excavation damage mechanisms. The most accepted one is the research gathered from the MMT-Mass Mining Technology Project, which divided the surrounding rock state of deep buried mine tunnels into four zones: elastic, micro-seismic, yield and excavation zone. The four divided zones represent different degrees of influence of excavation on surrounding rock masses (Mas et al. 2011; Itasca Wuhan Consulting Co. 2010). The damage and rupture of rock masses during excavation will lead to potential seepage channels, affecting the engineering, environmental safety and the support structure reliability. Rock burst is prone to occur under extremely high in-situ stress (Manouchehrian et al. 2018; He et al. 2010), which poses a great threat to the lives of workers and the safety of excavation equipment. Therefore, the prediction and evaluation of excavation damage areas will be significant to the safety of rock excavation engineering.
Due to the abundant hydro-power resources in western China, many large-scale and super-large hydro-power projects have been developed, most of which have been built between high mountains. Therefore, it is inevitable that excavating large-scale underground caverns and factories will be under high stress conditions. Examples of these high stress conditions include, the Ertan, the Jinping I, the Jinping II, the Baihetan Hydro-power Station, and more. The most representative one is the deep tunnels in Jinping II, the maximum depth is up to 2525 m, and the maximum in-situ stress is up to 70 MPa (Li et al. 2014), which is the largest underground caverns built in China. Scholars have conducted significant research on the laws of the excavation damage of Jinping deep buried tunnels, which is aimed at exploring the distributions of surrounding rock damage and providing references for engineering design. Field survey is regarded as the most direct approach to study tunnel excavation damage (Li et al. 2012; Xiao et al. 2000). However, the time period is long, the risk is high, and the observation range is small. Meanwhile, the excavation damage processes can not be intuitively described. Although many kinds of detection techniques are used, for example: The acoustic wave method (Xu et al. 2014), micro-seismic-acoustic emission method (Dai et al. 2015), permeability test (Liu et al. 2014), and digital panoramic borehole camera technique (Li et al. 2010), however, the detection accuracy and range are still limited. The small-scale geo-mechanical model test can compensate for this disadvantage (Bi et al. 2022; Zhang et al. 2019b; Zhang et al. 2020; Zhang et al. 2019a). However, the mechanical behavior of small-scale experimental results can not represent the engineering scale problems.
As an important means to analysis rock failure (Tang et al. 2006), numerical simulation can verify the laws of surrounding rock excavation damage, and clarify its internal mechanisms, which proves to be an essential supplement and reference for experiments and engineering practice. FEM is one of the most effective tools to investigate tunnel excavation damage (Song et al. 2015; Branco et al. 2015; Xu et al. 1994). It utilizes the elastic–plastic theory to calculate the damage range of surrounding rock masses, which fails to dynamically reflect the stress re-distribution characteristics after cracking. At the same time, the discontinuous parts in FEM, such as cracks or joints, are realized by grid division, which will be highly distorted under complex conditions (Xiao et al. 2006), further limiting the applications of traditional FEM into discontinuous simulations of surrounding rock mass damage. The DEM is a discontinuous numerical simulation method (Xu et al. 1994). Different from traditional FEM, the calculation domain in DEM is composed of particles. By setting different contact models and parameters between particles, the whole damage processes during tunnel excavation can be simulated, and the damage degree and damage range can be directly reflected (Haeri et al. 2017). However, complex parameter calibrations are needed before simulations. The newly developed discontinuous numerical methods such as NMM (Li et al. 2020; Ohnishi et al. 2014), Phase Field Method (Spetz et al. 2020), PD method (Shou et al. 2016; Zhou et al. 2022; Zhou et al. 2021; Zhou et al. 2014) and MPM (Zhang et al. 2011) all have wide applications in dealing with tunnel excavation damage, but limitations still exist.
SPH was first applied in solving astrophysical problems (Gingold et al. 1997; Lucy et al. 1977). Later, it was developed to be applied to solving fluid dynamics (Dalrymple et al. 2006; Potapov et al. 2009). Recently, it is used to simulate rock fracture mechanics. For example, The GPD developed by Zhou’s groups (Zhou et al. 2015a, b, c; Zhao et al. 2015; Zhou et al. 2015a, b, c; Bi et al. 2015; Bi et al. 2016; Bi et al. 2017; Bi 2016; Zhou et al. 2015a, b, c; Zhou et al. 2016). However, the existing SPH methods mostly simulated the fracture processes of small-scale specimens, and the applications to large-scale rock engineering practice are still limited.
In this paper, an improved form of SPH method is introduced to simulate the excavation damage of Jinping deep tunnels. The ‘Fissure Searching Generating Method’ (FSGM) has also been used to realize the generations of complex joints and excavation parts. Based on the background of Jinping deep tunnels, the damage range, fracture type (tensile failure or shear failure), and acoustic emissions, under tunnel excavation, are numerically simulated. Moreover, the influences of different depths and joints are emphatically discussed. The numerical results are compared with the pictures taken from the engineering site, which can verify the correctness of SPH method in dealing with tunnel excavation damage processes.
2 Failure treatments in the SPH method
In this section, only the failure treatments in the SPH method are introduced for that the basic concepts of SPH have been already presented in the existing references (Libersky et al. 1990; Libersky et al. 1993).
For each particle in SPH, a fracture mark variable ξ is introduced: During every calculation cycle, the fractured state is judged. If the particle is damaged, then ξ is assigned to be 0, else, ξ is assigned to be 1. Hence, the improved form of the kernel function in SPH can be re-written as follows (Bi 2016; Yu et al. 2021):
where W is the original kernel function, D is the improved kernel function.
Then the governing equations considering the particle damage characteristics can be expressed as (Bi 2016; Yu et al. 2021):
where α, β are the cartesian components of x, y.and z, which also obey the Einstein summation convention laws; i and j are the particle sequence number; N is the number of the particles that are within the searching domain of particle i; ρ is the particle density; m is the particle mass; σ represents the particle stress tensor; T is the artificial viscosity term; v represents the particle velocity and t is the calculation time.
The treatments of particle failure processes in SPH can be vividly shown in Fig. 1.

Treatments of fractured particles
3 Engineering background
3.1 Location and layout of jinping
Jinping II Hydro-power Station is located on the main stream of the Yalong River at Jinping Dahewan, as shown in Fig. 2a. The total installed capacity of the Jinping hydro-power station is 4800 MW, which is the largest hydro-power station on Yalong River. The project is mainly composed of three parts: the barrage, water diversion system and underground powerhouse, as shown in Fig. 2b. There are totally seven deep tunnels in Jinping II Hydropower Station, of which four are diversion tunnels, two are traffic tunnels, and one is a drainage tunnel. It is the largest underground tunnel group engineering in the world.

Engineering location and layout
3.2 Engineering geology
Along the diversion tunnel of Jinping II, it mainly consists of marble, sandstone and hundreds of meters of green mudstone, as shown in Fig. 3. The maximum buried depth of the tunnel is up to 2525 m. The rock strata along the tunnel are steeply inclined, and the more prominent faults intersect with the vertical or large angle of the tunnel axis, which can maintain the stability of the tunnel. However, the NW dip joints with a small angle to the tunnel axis and the NWW steep dip joints are the main factors affecting the tunnel excavation stability.

Engineering geology profile
4 Numerical model and calculation parameters
4.1 Calculation parameters
The Weibull functions are commonly employed to characterize the random material properties (Weibull et al. 1939), which is used in the SPH simulation:
where u is the mechanical properties of rock masses such as tensile strength, elasticity modulus; u0 is average value, and m is the heterogeneity extent.
For simplicity, only the Weibull distribution of the compressive strength is considered in this paper. The 50 mm × 100 mm rectangular sample is established using the improved SPH method, and m is set to 5. Through various calculations, results are shown in Fig. 4. The calculation results are slightly different from previous experimental results (Wuhan Institute of Rock and Soil Mechanics. 2013) for the following two reasons: (1) the heterogeneity characteristics of real rock specimens are slightly different from the assumed Weibull distributions, which can not fully represent the real characteristics of rock specimens; (2) The experimental specimens are 3D. However, our numerical simulations are 2D, which will make some differences. Yet, the numerical method can still reflect the failure patterns (the shear failure modes) and the stress–strain laws in previous experimental results (Wuhan Institute of Rock and Soil Mechanics. 2013), indicating that the parameters calibrated here can be used in the practical engineering.

Numerical calibration results
4.2 SPH model and calculation schemes
4.2.1 Generations of joints and excavation part
The joints and excavation part are generated according to the ‘Fissure Searching Generating Method’ (FSGM) introduced here: ① Define the geometric location of the prefabricated joints and the excavation part. For prefabricated joints, two endpoints xi1 and xi2 are required for input, marked as Li (i = 1,2…n). For the excavation part (tunnel), the central point xci and the radius of the excavated hole rci are also defined for input, which is Ci (i = 1,2…n). ② Generate ni ‘searching particles’ uniformly on the prefabricated joints Li and excavation part Ci. What should be considered is that the ‘searching particles’ should be on the prefabricated joint line Li or inside the excavation part Ci. ③ For each ‘searching particle’, a search radius d is assigned, usually taken as the average distance of real particles. If the real particle is covered inside the searching radius d, variable ξ is set to be 0.
4.2.2 Calculation conditions
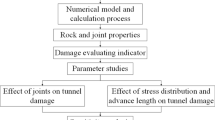
The damage degree and fracture mechanisms of surrounding rock during tunnel excavation at various depths are quite different, and the NWW directional joints are more developed. Therefore, considering these factors, four calculation conditions are calculated: A: different tunnel buried depths, B: different distances between tunnel and joints, C: different intersecting positions between joints and tunnel, and D: different joint dip angles. Four typical engineering sites are selected for analysis: 3 + 077 section (buried depth 1600 m), 10 + 850 section (buried depth 1900 m), 6 + 000 section (buried depth 2100 m) and 8 + 920 section (buried depth 2500 m). The initial confining pressure for condition A are as follows: A1 (d = 1600 m): σx = 38.89 MPa, σy = 42.15 MPa, σxy = 5.85 MPa; A2 (d = 1900 m): σx = 41.62 MPa, σy = 48.6 MPa, σxy = 4.54 MPa; A3 (d = 2100 m): σx = 40.69 MPa, σy = 51.9 MPa, σxy = 4.93 MPa; A4 (d = 2500 m): σx = 58.3 MPa, σy = 66.48 MPa, σxy = 0.58 MPa, which is shown in Table 1. The treatment is to set ξ of corresponding particles to 0 (Fig. 5).

The ‘Fissure Searching Generating Method’ (FSGM)
4.2.3 Numerical model
The 2D SPH model is established based on the actual engineering dimensions of the Jinping tunnel. The model size is 100 m × 100 m, which is more than 5 times the tunnel radius to reduce the boundary effect. Models A and D are taken as the example, which are shown in Fig. 6a and d, respectively. The radius of the circular excavation tunnel is 6.2 m, and the length of the prefabricated joint is 20 m in model B–D. The stress boundary is applied to the model based on the data measured in Jinping engineering.

SPH model and particle division details. a Model A; b Model D
The calculation steps are listed below: The first step is to carry out the stress balance simulation. Different stress boundaries are applied to the model, which gradually increases to the target stress in the first 5000 steps and remains unchanged in the next 2000 steps. Then the variable ξ is set to 0 for the tunnel at step 7000 to simulate the excavation process.
5 Analysis of the calculation results
5.1 Effect of buried depths on the tunnel excavation damage
Figure 7 shows the variations of minimum principal stress of condition A1 during tunnel excavation. It can be clearly seen that the stress wave is gradually propagating outward from the excavation part, and the damage around the tunnel can also be observed, representing the stress release process during tunnel excavation. This is also an advantage of the improved SPH method.

Variations of minimum principal stress of condition A1
To better show the results, we have exhibited the parts of the model close to the tunnel, in which the size of the exhibited part is 14 m × 14 m. Figure 8 shows the distributions of tunnel excavation damage at step 9000 of condition A. As can be seen, damage occurs around the tunnel after the excavation. The shear failure occurs at the direction of 5 o'clock and 10 o'clock, and the tensile failure occurs in other parts of the tunnel. The shear failure presents a typical “V” shaped zone, and the damage range is relatively large. However, the tensile failure range is relatively small compared with the shear zones, which is mostly within the range of 1 m around the tunnel. The increase of the buried depth lead to the increase of damage range of the shear zone. When the buried depth increases to 2500 m, large amounts of shear failure occur around the tunnel, as shown in Fig. 8 d, and the damage range increases significantly.

Damage range under different buried depths. a A1; b A2; c A3; d A4
Figure 9 shows the variations of maximum displacement of different monitoring points and the total numerical acoustic emission counts (particle damage counts). As can be seen, although we can see the “turning point” in Fig. 9a, this may be because the confining pressure does not increase linearly. However, the maximum displacement of different monitoring points shows an increasing trend. The maximum displacement of monitoring point D is the largest among conditions A1–A4, so the support measures on the tunnel vault should be carefully noticed. The numerical acoustic emission counts also increase with the tunnel buried depth. When the buried depth is 2500 m (condition A4), the acoustic emission count increases dramatically, indicating that the risk of tunnel instability is more significant under this condition and is consistent with the damage range shown in Fig. 8.

Variations of the maximum displacement and the numerical acoustic emission in condition A. a The maximum displacement; b The numerical acoustic emission
5.2 Effect of different distances on the tunnel excavation damage
Figure 10 shows the variations of minimum principal stress of condition B2 during tunnel excavation. Besides the similar stress release process, similar to condition A1, it can also be found that the joints block the propagation of stress waves during tunnel excavation, which has not been found or discussed in previous studies.

Variations of minimum principal stress of condition B2
Figure 11 shows the distributions of tunnel excavation damage at step 9000 of condition B. As can be seen, the joints alter the damage range and failure mode of tunnel excavation. For the case where the joint is close to the tunnel (distance k is less than 3.3 m), tensile failure mainly occurs around the tunnel, extending to the area between the tunnel and the joint. For the case where the distance k is equal to 5.5 m, the damage degree is much less than that of conditions with small distances, and the failure mode between the tunnel and the joint is mostly the shear failure. For the case where the joint is far away from the tunnel (distance k is 7.5 m), the damage does not run through the tunnel and the joint. The shear damage occurs in the direction of 10 o’clock, just like the “V” shaped zone in condition A. It is worth noting that not only does the joint affect the tunnel, but the excavation of the tunnel also influences the joint. No matter whether the joint is far or near, damage occurs around the joint to some certain extent. The failure mode around the joint is mostly tensile failure, accompanied by little shear failure. The damage degree around the joint decreases with the increase of the distance k. Meanwhile, little damage occurs outside the joint, and this may be associated with the phenomenon that the joints block the propagation of stress waves shown in Fig. 10.

Damage range under different distances. a Condition B1; b Condition B2; c Condition B3; d Condition B4
Figure 12 illustrates the variations of maximum displacement of different monitoring points and the total numerical acoustic emission counts (particle damage counts). As can be seen, the maximum displacement of each monitoring point increases with the increase of distance k, reflecting the increase in the whole system's flexibility. However, the numerical acoustic emission shows that with the increase of distance k, the damage extent increases first and then decreases. The maximum damage happens in condition B2 (distance k = 3.3 m), where a rock burst is more likely to occur.

Variations of the maximum displacement and the numerical acoustic emission in condition B. a The maximum displacement; b The numerical acoustic emission
5.3 Effect of different intersecting positions on the tunnel excavation damage
Figure 13 shows distributions of tunnel excavation damage at step 9000 of condition C. In contrast, the damage profile of the same condition where no joints exist in the model is drawn on each picture, just as the yellow line shown in Fig. 13. The joint intersecting with the tunnel has no significant effects on the original “V” shaped zone. However, new shear failure occurs at the endpoints of the joint. When the joint appears in the vault (Location A), the north arch shoulder (Location B) and the south arch shoulder (Location D), the damage range increases little, indicating that the joint has little influence on the stability of the excavated tunnel under these conditions. However, when the joint appears in the north wall (Location C) and the south wall (Location E), the damage range around the tunnel increases significantly, indicating the instability of the tunnel.

Damage range under different intersecting positions. a C1; b C2; c C3; d C4; d C5
Figure 14 shows the variations of maximum displacement of different monitoring points and the total numerical acoustic emission counts (particle damage counts). In general, when the joint appears at different locations, the maximum displacement of the opposite monitoring point increases. What should be noted is that the maximum displacement of monitoring A is 0 in the condition of Location C (the north wall) and Location E (the south wall). This is because the monitoring point is just on the joint. The numerical acoustic emission counts are less when the joint is in Location A, Location B and Location D compared with that in Location C and Location E.

Variations of the maximum displacement and the numerical acoustic emission in condition C. a The maximum displacement; b The numerical acoustic emission
5.4 Effect of different joint dip angles on the tunnel excavation damage
Figure 15 shows distributions of tunnel excavation damage at step 9000 of condition D. As can be seen, the damage mainly occurs in the area between the joint and the tunnel. For the condition when α is less than 45° (steep dip), large amounts of damage occur between the joint and the tunnel, and the shear failure zone appears in the direction from 9 o'clock to 10 o' clock. Meanwhile, the range of the shear failure zone becomes smaller with the increase of α. When α = 45°, the damage degree is the smallest among the condition D. When α is more than 45° (gentle dip), the damage around the tunnel becomes larger again, and the shear failure around the tunnel gradually accumulates in the direction from 6 o'clock to 9 o' clock.

Damage range under different joint dip angles. a Condition D1; b Condition D2; c Condition D3; d Condition D4; d Condition D5
Figure 16 shows the variations of maximum displacement of different monitoring points and the total numerical acoustic emission counts (particle damage counts). Overall, the maximum displacement is more significant in the direction of 9 o'clock (monitoring point A) and 12 o'clock (monitoring point D), but smaller in the direction of 3 o'clock (monitoring point C) and 6 o'clock (monitoring point B). With the increase of α, the maximum displacement of all the monitoring points show an increasing trend. The numerical acoustic emission counts initially decrease and then increase with the increase of α, and the AE counts turn out to be the smallest in the condition α = 45°, indicating that the damage degree is the smallest in this circumstance.

Variations of the maximum displacement and the numerical acoustic emission in condition D. a The maximum displacement; b The numerical acoustic emission
6 Discussions
6.1 Rationality verifications of numerical simulation
The rationality of numerical simulation needs to be verified by engineering practice. In this section, some representative engineering pictures are selected here to compare with the numerical results under different conditions. Figure 17 shows two typical rock bursts during the excavation of the Jinping drainage tunnel (Wuhan Institute of Rock and Soil Mechanics. 2013) (Fig. 17a is the rock burst on 11.6, and Fig. 17c is the rock burst on 11.15). As shown in the figure, the range and the shape of tunnel excavation damage calculated in this paper are consistent with the fracture surface of rock burst in Jinping. We can also see from Fig. 17 b and d that the maximum rock mass velocity of 11.6 rock burst is 3 m/s, while the maximum rock mass velocity of 11.15 rock burst is up to 5 m/s. The numerical results indicate the high speed and violent movement of rock masses, which is consistent with the characteristics in Jinping.

Comparisons of the tunnel profile and numerical simulation of two typical rock
Figure 18 shows the typical section of 11.28 intense rock burst (Yu. 2013). The field survey indicated an invisible joint in the upper right side of the tunnel, leading to this disaster. The rock burst caused 7 deaths and 1 injury, as well as burying and damaging TBM. It can be seen from Fig. 18a that the rock burst formed a triangular-shaped fracture profile, which is consistent with the damage range simulated in this paper. Meanwhile, we can also see from Fig. 18b that a high throwing speed is formed in the rock block around the joint, indicating the instability of rock masses. The numerical simulation here is also consistent with the engineering practice.

Comparisons of 11.28 rock burst and the numerical simulation. a The tunnel profile of rock burst on 11.28 and the damage range of numerical simulation results; b Distributions of velocity of rock burst on 11.28
Figure 19 is the situation where the joint appears in the vault (Location A) and the south wall (Location E) of the tunnel (Yu. 2013). As shown in Fig. 19a, when the joint appears in the vault, the tunnel is usually stable. Numerical results in Fig. 19b show that the damage range increases little compared with the same condition when no joints exist in the model, which is consistent with the actual situations. When the joint appears in the south wall, the upper right side of the tunnel is destroyed, as shown in Fig. 19c. The damage range of numerical simulation results in Fig. 19d increases dramatically in the upper right side of the tunnel, which also agrees with the engineering practice.

Comparisons of the tunnel profile and numerical simulation of different intersecting positions in Jinping. a The engineering practice whit a joint in the vault; b Numerical simulation whit a joint in the vault; c The engineering practice whit a joint in the south wall; d Numerical simulation whit a joint in the south wall
Figure 20 shows the engineering practice with a gentle dip joint (Fig. 20a) (Yu. 2013) and the numerical simulation results (Fig. 20b). As can be seen, large amounts of damage occur between the joint and tunnel. The numerical simulation results also show that the damage range mainly concentrates on the area between the tunnel and the joint, indicating that the numerical simulation results are similar to the practical engineering.

Comparisons between the engineering practice and the numerical simulation results with one gentle dip joint. a Engineering practice; b Numerical simulation
6.2 Applications and future research directions of SPH in rock mechanics engineering
Previous studies concerning the applications of the SPH method in rock mechanics primarily concentrate on small scale specimens, and few studies have applied SPH to engineering practice (some studies just simplify the calculation conditions, and the simulation results do not have a good consistency with practical engineering). Using the improved form of the SPH method, our study systematically simulates the damage degree under the combinations of various conditions in Jinping deep tunnels for the first time. Comparisons with engineering practice verify the validity and rationality of the improved numerical method. Although some shortcomings can still be overcome, it can still provide some references for disaster predictions of similar projects.
7 Conclusions
-
1
An improved SPH method has been introduced to simulate rock fracture. The ‘Fissure Searching Generating Method’ (FSGM) has also been used to realize the generations of joints and the excavation parts of the tunnel.
-
2
Typical “V” shaped shear failure zones occur in the direction of 5 o'clock and 10 o'clock after tunnel excavation, and the damage range and AE counts increase with the increase of buried depth.
-
3
The damage degree decreases with the increase of the distance between the joint and the tunnel, and the failure mode gradually transforms from tensile to shear.
-
4
When the joints exist in the vault, north arch shoulder, and south arch shoulder, the damage range and the AE counts are extensive, but when they are in the north wall and south wall, the damage range is smaller.
-
5
Both steep and gentle dip joints significantly influence tunnel excavation damage, and the damage degree is the least when the joint inclination angle is 45°.
References
Bi J (2016) The fracture mechanisms of rock mass under stress、seepage、temperature and damage coupling condition and numerical simulations by using the general particle dynamics (gpd) algorithm. Chongqing University, Chongqing
Bi J, Zhou XP (2015) Numerical simulation of zonal disintegration of the surrounding rock masses around a deep circular tunnel under dynamic unloading. Int J Comput Methods 12(03):1550020
Bi J, Zhou XP (2017) A novel numerical algorithm for simulation of initiation, propagation and coalescence of flaws subject to internal fluid pressure and vertical stress in the framework of general particle dynamics. Rock Mech Rock Eng 50(7):1–17
Bi J, Zhou XP, Qian QH (2016) The 3D numerical simulation for the propagation process of multiple pre-existing flaws in rock-like materials subjected to biaxial compressive loads. Rock Mech Rock Eng 49(5):1611–1627
Bi J, Tang J, Wang C, Quan D, Teng M (2022) Crack coalescence behavior of rocklike specimens containing two circular embedded flaws. Lithosphere 11:9498148
Branco R, Antunes F, Costa J (2015) A review on 3D-FE adaptive remeshing techniques for crack growth modelling. Eng Fract Mech 141:170–195
Carlson S, Young R (1993) Acoustic emission and ultrasonic velocity study of excavation-induced microcrack damage at the underground research laboratory. Int J Rock Mech Min Sci 30(7):901–907
Dai F, Li B, Xu N (2015) Characteristics of damaged zones due to excavation in deep underground power house at Houziyan hydro-power station. Chin J Rock Mech Eng 34(04):735–746
Dalrymple R, Rogers B (2006) Numerical modeling of water waves with the SPH method. Coast Eng 53(2):141–147
Fairhurst C (2004) Nuclear waste disposal and rock mechanics: contributions of the underground research laboratory (URL), Pinawa, Manitoba, Canada. Int J Rock Mech Min Sci 41(8):1221–1227
Gingold R, Monaghan J (1977) Smoothed particle hydrodynamics: theory and application to non-spherical stars. Mon Not R Astron Soc 15(3):375–389
Haeri H, Sarfarazi V, Zheming Z (2017) Investigation of proper specimen geometry for mode I fracture toughness using PFC2D. Comput Concr 2(23):134–145
He M, Miao J, Feng J (2010) Rock burst process of limestone and its acoustic emission characteristics under true-triaxial unloading conditions. Int J Rock Mech Min Sci 47(2):286–298
Hsiung S, Chowdhury A, Nataraja M (2005) Numerical simulation of thermal -mechanical processes observed at the drift-scale heater test at Yucca Mountain, Nevada, USA. Int J Rock Mech Min Sci 42(5–6):652–666
Itasca Wuhan Consulting Co., Ltd. (2010) A special study on stability and dynamic support design of diversion tunnel in Jinping No.2 hydropower station —— summary report of (2010) Wuhan. Itasca Wuhan Consulting Co., Ltd
Li X, Li Y (2014) Research on risk assessment system for water inrush in the karst tunnel construction based on GIS: case study on the diversion tunnel groups of the Jinping II Hydropower Station. Tunn Undergr Space Technol 2(40):182–191
Li S, Feng X, Zhang C (2010) Testing on formationand evolution of TBM excavation damaged zone in deep-buried tunnel based on digital panoramic borehole camera technique. Chin J Rock Mech Eng 29(06):1106–1112
Li S, Feng X, Li Z (2012) In situ monitoring of rockburst nucleation and evolution in the deeply buried tunnels of Jinping II hydropower station. Eng Geol 6(137–138):85–96
Li G, Wang K, Tang C (2020) An NMM-based fluid-solid coupling model for simulating rock hydraulic fracturing process. Eng Fract Mech 8(235):107193
Libersky L, Petschek A (1990) Smoothed particle hydrodynamics with strength of materials, advances in the free lagrange method. Lect Notes Phys 395:248–257
Libersky L, Petschek A, Carney T (1993) Allahdadi F. High strain Lagrangian hydrodynamics a three-dimensional SPH code for dynamic material response. J Comput Phys 109(1): 67–75.
Liu W, Li Y, Yang C (2014) Methods for testing permeability of deep mudstone and analysis of data reliability of each method. Rock Soil Mech 35(S1):85–90
Lucy L (1977) A numerical approach to the testing of the fission hypothesis. Astron J 82(12):1013–1024
Manouchehrian A, Cai M (2018) Numerical modeling of rockburst near fault zones in deep tunnels. Tunn Undergr Space Technol 80(10):164–180
Martin C, Simmons G (1993) Underground research laboratory: an opportunity for basicrock mechanics. Int J Rock Mech Mining Sci Geomech Abstracts 30(2):A134
Mas Ivars D, Pierce M, Darcel C (2011) The synthetic rock mass approach for jointedrock mass modelling. Int J Rock Mech Min Sci 48(2):219–244
Ohnishi Y, Sasaki T, Koyama T (2014) Recent insights into analytical precision and modelling of DDA and NMM for practical problems. Geomechanics & Geoengineering 9(2):97–112
Potapov S, Maurel B, Combescure A (2009) Modeling accidental-type fluid–structure interaction problems with the SPH method. Comput Struct 87(11):721–734
Potyondy D (1998) Modeling notch-formation mechanisms in the URL Mine-by Test Tunnel using bonded assemblies of circular particles. Int J Rock Mech Min Sci 35(4–5):510–511
Read R (2004) 20 years of excavation response studies at AECL’s underground research laboratory. Int J Rock Mech Min Sci 41(8):1251–1275
Shou Y, Zhou X, Qian Q (2016) Dynamic model of the zonal disintegration of rock surrounding a deep spherical cavity. Int J Geomech 17(6):04016127
Song J, Chen F, Wang F (2015) Study on the characteristics of the fracture process zone in concrete crack propagation based on FRANC3D. Int J Earth Sci Eng 8(2):849–853
Spetz A, Denzer R, Tudisco E (2020) Phase-field fracture modelling of crack nucleation and propagation in porous rock. Int J Fract 224(1):31–46
Stanfors R, Rhen I, Tullborg E (1999) Overview of geological and hydro-geological conditions of the Aspo hard rock laboratory site. AppliedGeochemistry 14(7):819–834
Tang C, Li L, Li C (2006) RFPA strength reduction method for stability analysis of geotechnical engineering. Chin J Rock Mech Eng 08:1522–1530
Vonneumann J, Richtmyer R (1950) A method for the numerical calculation of hydrodynamic shocks. J Appl Phys 21(3):232–240
Weibull W (1939) A statistical theory of the strength of materials. Ing Vet Ak Handl 151:5–44
Wuhan institute of rock and soil mechanics, Chinese Academy of Sciences (2013) Study on the mechanism, regularity and control measures of rock burst in diversion tunnel of Jinping No .2 Hydropower Station. Wuhan. Wuhan Institute of Rock and Soil Mechanics, Chinese Academy of Sciences.
Xiao X, Yan X (2016) A numerical analysis for cracks emanating from a surface semi-spherical cavity in an infinite elastic body by FRANC3D. Eng Fail Anal 15(1):417–418
Xiao W, Hou Q, Li J, Brian FW, Hao J, Fang A, Zhou H, Wang Z, Chen H, Zhang G, Yuan C (2000) Tectonic facies and the archipelago-accretion process of the West Kunlun, China. Sci China Ser D: Earth Sci 43:134–143
Xu X, Needleman A (1994) Numerical simulations of fast crack growth in brittle solids. J Mech Phys Solids 42:1397–1434
Xu G, Dong J, Li Z, Song S, Zhang S, Wang J (2014) EDZ assessmemnt for underground cavern by acoustic wave method. Earth Sci J China Univ Geosci 39(11):1599–1606
Yu H (2013) Study on macro- and mesos-copic mechanicalproperties of deep-buried marble and its engineering application. Hohai University, Hohai
Yu S, Ren X, Zhang J (2021) An improved form of smoothed particle hydrodynamics method for crack propagation simulation applied in rock mechanics. Int J Min Sci Technol 31(3):421–428
Zhang D, Ma X, Giguere P (2011) Material point method enhanced by modified gradient of shape function. J Comput Phys 230(16):6379–6398
Zhang Q, Zhang Y, Duan K (2019a) Large-scale geo-mechanical model tests for the stability assessment of deep underground complex under true-triaxial stress. Tunn Undergr Space Technol 1(83):577–591
Zhang Q, Ren M, Duan K (2019b) Geo-mechanical model test on the collaborative bearing effect of rock-support system for deep tunnel in complicated rock strata. Tunnelling Underground Space Technol 9(91):1030011–10300119
Zhao Y, Zhou XP, Qian QH (2015) Progressive failure processes of reinforced slopes based on general particle dynamic method. J Central South Univ 22(010):4049–4055
Zhou XP, Bi J (2016) 3D numerical study on the growth and coalescence of pre-existing flaws in rocklike materials subjected to uniaxial compression. Int J Geomech 16(4):04015096
Zhou X, Yao W (2021) Smoothed Bond-Based Peridynamics. J Peridyn Nonlocal Model 15:1–23
Zhou X, Shou Y, Qian Q (2014) Three-dimensional nonlinear strength criterion for rock-like materials based on the micromechanical method. Int J Rock Mech Min Sci 72:54–60
Zhou XP, Zhao Y, Qian QH (2015a) A novel meshless numerical method for modeling progressive failure processes of slopes. Eng Geol 192:139–153
Zhou XP, Zhao Y, Qian QH (2015b) Numerical simulation of rock failure process in uniaxial compression using smoothed particle hydrodynamics. Chin J Rock Mech Eng 34:2647–2658
Zhou XP, Bi J, Qian QH (2015c) Numerical simulation of crack growth and coalescence in rock-like materials containing multiple pre-existing flaws. Rock Mech Rock Eng 48(3):1097–1114
Zhou X, Du E, Wang Y (2022) Thermo-hydro-chemo-mechanical coupling peridynamic model of fractured rock mass and its application in geothermal extraction. Comput Geotech 148:104837
Funding
This work was supported by the “Fundamental Research Funds for the Central Universities” (B220204001). Meanwhile, the authors would thank to Professor Bi Jing for his supports in the programming of SPH.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of interest
None.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Yu, S., Ren, X., Zhang, J. et al. Numerical simulation on the excavation damage of Jinping deep tunnels based on the SPH method. Geomech. Geophys. Geo-energ. Geo-resour. 9, 1 (2023). https://doi.org/10.1007/s40948-023-00545-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40948-023-00545-z