
Abstract
The current manuscript investigates by proposing new numerical schemes based on the Adomian's technique for the resolution of the dark and singular solutions of the Chen-Lee-Liu (CLL) equation. More precisely, the schemes are derived from the Wazwaz's modification of the Adomian's method and the improved Adomian's method for treating complex-valued evolution equations. The CLL model is applicable to a variety of applications including photonic and optical crystal fibers. The schemes which are implemented via the help of the Maple software have many salient advantages as contained in the comparative analysis. Finally, we depict certain results graphically together with some supportive tables, in addition to some comprehensive remarks.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
Complex evolution equations are important models that play vital roles in the field of nonlinear sciences including the fluid dynamics, optic fibers, plasma physics, pulse in biological chains, quantum mechanics and so on [1,2,3,4,5]. A notable equation that surfaces from the Derivative Nonlinear Schrödinger's Equation (DNLSE) and utilized for studying soliton propagation through optical fibers is the famous Chen-Lee-Liu (CLL) equation [6] with vast applicability to a variety of applications, including photonic and optical crystal fibers. More recently, there has been an increasing amount of literature on the dark and singular solitons in optical and photonic crystal fibers [7,8,9,10,11]. The literature has attracted a great deal of attention due to their attractive characteristics and wide-ranging applications. Dark solitons are robust complex objects that have better stability (constant amplitude) against different disturbances compared to the bright solitons that are characterized by fiber loss, Raman effects, the mutual interaction between the adjacent pulses and the overlay of noise emitted by optical amplifiers, see [2] among others. More so, there are many various analytical and computational methods in the literature to address the class of Nonlinear Schrodinger Equations (NLSE) including among others [12,13,14,15,16,17,18,19,20,21,22,23] and the references therewith. Nevertheless, with regards to the CLL equation, very few computational techniques are available to numerically treat the model via the application of the standard Adomian's method and its modifications with particular types of soliton solutions [24,25,26,27,28,29]. Other similar numerical-based considerations to treat both the integer and non-integer order evolution equations and other broader forms of differential equations models are available in [30,31,32,33,34,35,36,37,38,39,40] and the references therein.
However, the aim of this paper is to numerically study the CLL equation amidst the presence of dispersion and steepening terms via the applications of the Adomian Decomposition Method (ADM) and Improved Adomian Decomposition Method (IADM) [21,22,23]. Two types of optical soliton solutions comprising the dark and singular solitons are sought for as benchmark exact solitons for the validation of the proposed schemes. Illustrative examples cases to exhibit the applicability and effectiveness of the schemes will be examined.
Thus, the dimensionless form of the CLL model in optical fibers is expressed as follows:
where \(q=q(x,t)\) is the complex-wave profile in spatial \(x\) and temporal \(t\), variables; \(a\) and \(b\) are real constants. Physically, the parameter \(a\) is group velocity dispersion, while the parameter \(b\) denotes the self-steepening phenomena in the context of optical fiber [14]. It is also worth noting here that when \(a=b=1\) in Eq. (1.1), the CLL equation recasts to the Regular CLL (RCLL) equation [6]. Furthermore, the newly constructed dark and singular solitary wave solutions [7, 8] of Eq. (1.1) using the ansatz method will be used as benchmark exact solutions for numerical comparisons. Also, the manuscript follows the organization: Sect. 2 and Sect. 3 recall some exact dark and singular solitons, correspondingly. The outline of the methodologies is given in Sect. 4. Discussions of the results acquired are presented in Sect. 5; while Sect. 6 gives the conclusion.
Dark Optical Soliton Solutions
coupled to the initial condition
with \(R\) and \(G\) as parameters given by some relations defined as
of which given the constants \(a,b,k,v\) and \(\omega \),\(\delta =\frac{{v}^{2}}{4{a}^{2}}+\frac{vk-\omega }{a} \mathrm{and} \sigma =-\frac{bv}{2{a}^{2}}.\)
-
The second type of dark solution of Eq. (1.1) from [7] for \( \gamma > 0 \) and \(\sigma < 0\) is given by:
coupled to the initial condition
where \(B\) and \(r\) are related by some relations defined as
of which given the constants \(a,b,k,v\) and \(\omega\), \(\delta = \frac{{v^{2} }}{{4a^{2} }} + \frac{vk - \omega }{a} {\text{and }} \sigma = - \frac{bv}{{2a^{2} }}.\)
-
The third type of dark (gray) solution of Eq. (1.1) from [7] for \( \delta < 0 \) and \(\sigma > 0\) is given by:
with the initial condition
where \(n, \in ,v,k\) and \(\mu\) are arbitrary constants.
Singular Optical Soliton Solutions
coupled to the initial condition
with \(A \) and \(r\) as parameters defined as follows
of which given the constants \(a,b,k,v\) and \(\omega\), \(\delta = \frac{{v^{2} }}{{4a^{2} }} + \frac{vk - \omega }{a} {\text{and}} \sigma = - \frac{bv}{{2a^{2} }}\) for all \(\delta < 0\) and \(\sigma > 0,\) provided that \(\gamma = \frac{{3 \sigma^{2} }}{16\delta }\).
coupled to the initial condition
where \(M,\mu\) and \(r \) are real parameters given by the expressions
of which given the constants \(a,b,k,v\) and \(\omega\), \(\delta = \frac{{v^{2} }}{{4a^{2} }} + \frac{vk - \omega }{a} {\text{and}} \sigma = - \frac{bv}{{2a^{2} }},\) for all \(\delta < 0\) and \(\sigma > 0,\) provided that \(\gamma > \left| {\frac{{3 \sigma^{2} }}{16\delta }} \right|.\)
coupled to the initial condition
with \(P,Q\) and \(R \) parameters given by the following relations
of which given the constants \(a,b,k,v\) and \(\omega\), \(\delta = \frac{{v^{2} }}{{4a^{2} }} + \frac{vk - \omega }{a} {\text{and}} \sigma = - \frac{bv}{{2a^{2} }},\) for all \(\delta < 0\), all \(\sigma \left\langle {0, \gamma } \right\rangle 0 \) and \(R < - 1.\)
coupled to the initial condition
where \(Z \) and \(n \) are real parameters given by the expressions
of which given the constants \(a,b,k,v\) and \(\omega\), \(\delta = \frac{{v^{2} }}{{4a^{2} }} + \frac{vk - \omega }{a} {\text{and}} \sigma = - \frac{bv}{{2a^{2} }},\) for all \(\delta < 0\) and \(\gamma < \left| {\frac{{3\sigma^{2} }}{16\delta }} \right|\).
Numerical Methods
Adomian Decomposition Method
Here, a consideration of the modification of ADM proposed by Wazwaz [22, 25, 30] is made. Making use of the operator notation by assuming \( L_{t} = \frac{\partial }{\partial t}\), and its analogous inverse operator \( L_{t}^{ - 1} = \mathop \smallint \limits_{0}^{t} \left( . \right)dt\), Eq. (1.1) is expressed as
where \(A \) in the above equation is the nonlinear term originally given by
Therefore, the decomposition method represents the given solution in Eq. (4.1) by an infinite series given as
and decomposes the nonlinear term \(A\)
with \(A_{n} ^{\prime}s\) denoting the Adomian’s polynomials explicitly defined by the given formula
Now, on substituting Eq. (4.3) and Eq. (4.4) into Eq. (4.1) yields the following
which consequently reveals the recursive solution scheme as follows
Improved Adomian Decomposition Method
The IADM [20, 21, 24, 26] was mainly proposed to transform complex-valued equations into systems of real-valued equations for onward treatment using the ADM. Thus, to transform the complex-valued equation of Eq. (1.1) form to a real system, the method goes by splitting the imaginary and real components of the complex profile \(q\left( {x,t} \right)\) as follows
where \(q_{1} {\text{and }} q_{2} \) are real-valued functions. Therefore, making use of Eq. (4.8) into Eq. (1.1), the following system of real-valued equations is obtained
where \( q_{1} \left( {x,0} \right) = \left[ {q\left( {x,0} \right)} \right]_{R }\) and \( q_{2} \left( {x,0} \right) = \left[ {q\left( {x,0} \right)} \right]_{I} ,\) with \(R \) denoting the real component and \(I\) represents the imaginary component.
Furthermore, the solutions in the above equation \(q_{1} {\text{and }} q_{2}\) are decomposed using the following infinite sums
where the components \(q_{1n} , q_{2n} , \left( {n \ge 0} \right)\) are to be determined recursively.
The nonlinear terms in Eq. (4.9) are represented by the following
Applying the inverse operator \( L_{t}^{ - 1} = \mathop \smallint \limits_{0}^{t} \left( . \right)dt \) into Eq. (4.9) together with the application of Eq. (4.11) yields
Substituting the solution form from Eq. (4.10) into Eq. (4.12), we get
where \(A_{1m} , {\text{and}} A_{2m}\) are the Adomian's polynomials belonging to the nonlinear terms \(A_{1} {\text{and}} A_{2} \) given in Eq. (4.11). These polynomials are to be computed recursively from Eq. (4.5). Finally, the overall recurrent scheme for the model is obtained by the components in Eq. (4.13) via Eq. (4.4).
Numerical Results
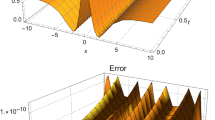
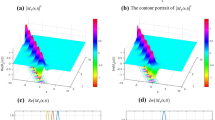
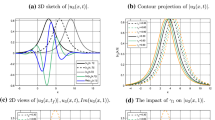
This section presents the obtained numerical results using the said two methods and deduces comparatively the relationship between the schemes. Taking into consideration various dark and singular optical soliton solutions given in Sects. 2 and 3, we utilize the recurrent schemes determined in Sect. 4 to simulate the solutions for the CLL model. In doing so, we make use of the Maple software to exhibit the resultant depictions in Figs. 1, 2, 3, 4, 5, 6 and report the error analysis in Tables 1, 2, 3, 4. Figures 1 and 2 compare the two results between the exact and approximate solutions of the model using the dark (first and second types) and gray (third type) solitons via the use of the ADM and IADM, correspondingly; additionally, Figs. 3, 4, 5, 6 graphically illustrate the comparison of results between the exact and approximate solutions of the model using singular (first, second, third and forth types) solitons via the two methods, correspondingly. Furthermore, looking at the revealed minimal error discrepancies, it is remarked here that the method due to IADM is more efficient than the ADM with regards to these types of solutions considered as benchmarks; this also is in conformity with most related numerical literatures on the ADM and IADM.

Comparison between the exact and approximation solutions with ADM for the dark and gray solitons

Comparison between the exact and approximation solutions with IADM for the dark and gray solitons

Comparison between the exact and approximation solutions with ADM for the singular solitons

Comparison between the exact and approximation solutions with ADM for the singular solitons

Comparison between the exact and approximation solutions with IADM for the singular solitons

Comparison between the exact and approximation solutions with IADM for the singular solitons
Conclusions
The purpose of the current investigation was to derive two numerical recursive schemes based the decomposition methods to investigate the optical CLL model amidst the presence of dispersion and steepening terms. The results for the exact and numerical solutions of the CLL model are evaluated to exhibit the correctness and effectiveness of the devised methods. In order to achieve this, we hunted for certain exact dark and singular solitons of the model to ascertain a computational relative analysis. The choice of dark solitons is indeed in favour of their stability against disturbances compared to the bright solitons; while and singular soliton solution for their discontinuous derivatives. We simulated the results on the Maple software. Both the two schemes revealed quite interesting results and demonstrated high-level of accuracy. Through Tables 1, 2, 3, 4 and Figs. 1, 2, 3, 4, 5, 6, it can be observed that the IADM possessed higher accuracy with minimal error than the ADM; however, this is also is in conformity with most related literatures on the ADM and IADM. The reported figures indeed spoke for themselves with regards to accuracy of the methods. In all, the contribution of this study is to confirm the exactness, from a numerical perspective, of the exact solutions available for the CLL model. In addition, similar investigations may be conducted with other types of solutions or by considering different complex evolution equations.
Data Availability
All the data used for the numerical simulations and comparison purpose have been reported in the tables included and visualized in the graphical illustrations and nothing is left.
References
Chen, F.: Introduction to Plasma Physics and Controlled Fusion. Springer (2006).
Liu, W., et al.: Solitary wave pulses in optical fibers with normal dispersion and higher-order effects. Phys. Rev. 79(6), 1 (2009)
Beig, R., et al.: Nonlinear Science at the Dawn of the 21st Century. Springer (2000)
Kivshar, Y.S., et al.: Solitons in Photonic Crystals. . Opt. Solitons 1, 425–446 (2003). https://doi.org/10.1016/b978-012410590-4/50012-7
Chabchoub, A., et al.: Rogue wave observation in a water wave tank. Phys. Rev. Lett. 106(20), 1 (2011)
Chen, H.H., et al.: Integrability of nonlinear Hamiltonian systems by inverse scattering method. Phys. Scr. 20(3–4), 490–492 (1979)
Triki, H., et al.: Chirped dark and gray solitons for Chen–Lee–Liu equation in optical fibers and PCF. Optik 155, 329–333 (2018)
Triki, H., et al.: Chirped singular solitons for Chen-Lee-Liu equation in optical fibers and PCF. Optik 157, 156–160 (2018)
Tahir, M., Awan, A.: Optical singular and dark solitons with Biswas-Arshed model by modified simple equation method. Optik 202, 163523 (2020)
Hosseini, K., et al.: Bright and dark solitons of a weakly nonlocal schrödinger equation involving the parabolic law nonlinearity. Optik 227, 166042 (2021)
Awan, A., et al.: Singular and bright-singular combo optical solitons in birefringent fibers to the Biswas–Arshed equation. Optik 210, 164489 (2020)
Yusuf, A., et al.: Breather wave, lump-periodic solutions and some other interaction phenomena to the Caudrey–Dodd–Gibbon equation. Eur. Phys. J. Plus 135(7), 1 (2020)
Atangana, A.: Blind in a commutative world: simple illustrations with functions and chaotic attractors. Chaos, Solitons Fractals 114, 347–363 (2018)
Rogers, C., Chow, K.W.: Localized pulses for the quintic derivative nonlinear schrödinger equation on a continuous-wave background. Phys. Rev. E 86(3), 1 (2012)
Sulaiman, T.A., Hasan, B.: Optical Solitons and Modulation Instability Analysis of the (1+1)-Dimensional Coupled Nonlinear Schrödinger Equation. Commun. Theor. Phys. 72(2), 025003 (2020)
Sulaiman, T.A., et al.: New lump, lump-kink, breather waves and other interaction solutions to the (3+1)-dimensional soliton equation. Commun. Theor. Phys. 72(8), 085004 (2020)
Sulaiman, T.A.: Three-component coupled nonlinear Schrödinger equation: optical soliton and modulation instability analysis. Phys. Scr. 95(6), 65201 (2020)
Younas, B., Muhammad, Y.: Chirped solitons in optical monomode fibres modelled with Chen–Lee–Liu equation. Pramana 94(1), 1 (2019)
Ivanov, S.K.: Riemann problem for the light pulses in optical fibers for the generalized Chen–Lee–Liu equation. Phys. Rev. A 101(5), 1 (2020)
Bakodah, H.O., et al.: Bright and dark thirring optical solitons with improved adomian decomposition method. Optik 130, 1115–1123 (2017)
Banaja, M.A., et al.: The investigate of optical solitons in cascaded system by improved adomian decomposition scheme. Optik 130, 1107–1114 (2017)
Wazwaz, A.: A new algorithm for calculating adomian polynomials for nonlinear operators. Appl. Math. Comput. 111(1), 33–51 (2000)
González-Gaxiola, O., Biswas, A.: W-shaped optical solitons of Chen–Lee–Liu equation by Laplace-Adomian decomposition method. Opt. Quant. Electron. 50(8), 1 (2018)
Mohammed, A.S.H.F., Bakodah, H.O.: Numerical investigation of the adomian-based methods with w-shaped optical solitons of Chen–Lee–Liu equation. Phys. Scr. 96(3), 35206 (2020)
Mohammed, A.S.H.F., et al.: Approximate adomian solutions to the bright optical solitary waves of the Chen–Lee–Liu equation. MATTER Int. J. Sci. Technol. 5(3), 110–120 (2019)
Mohammed, A.S.H.F., et al.: Bright optical solitons of Chen-Lee-Liu equation with improved adomian decomposition method. Optik 181, 964–970 (2019)
Abdullah, A., Rafiq, A.: A new numerical scheme based on Haar wavelets for the numerical solution of the Chen–Lee–Liu equation. Optik 226, 165847 (2021)
Mohammed, A.S.H.F., Bakodah, O.H.: Numerical consideration of Chen–Lee–Liu equation through modification method for various types of solitons. Am. J. Comput. Math. 10(03), 398–409 (2020)
Mohammed, A.S.H.F., Bakodah, H.O.: A reliable modification method for Chen–Lee–Liu equation with different optical solitons. Nonlinear Anal. Differ. Equ. 8(1), 67–75 (2020)
Biazar, J., et al.: An alternate algorithm for computing adomian polynomials in special cases. Appl. Math. Comput. 138(2–3), 523–529 (2003)
Nuruddeen, R.I., et al.: A review of the integral transforms-based decomposition methods and their applications in solving nonlinear PDEs. Palest. J. Math. 7, 262–280 (2018)
Sulaiman, T.A., Hasan, B.: The new extended rational SGEEM for construction of optical solitons to the (2+ 1)-dimensional Kundu–Mukherjee–Naskar model. Appl. Math. Nonlinear Sci. 4(2), 513–522 (2020)
Wei, G., et al.: Complex solitons in the conformable (2+1)-dimensional Ablowitz–Kaup–Newell–Segur equation. Aims Math. 5(1), 507–521 (2020)
Owolabi, K.M.: Mathematical analysis and numerical simulation of chaotic noninteger order differential systems with Riemann–Liouville derivative. Progr. Fract. Differ. Appl. 6(1), 29–42 (2020)
Yousef, A.M., et al.: On dynamics of a fractional-order SIRS epidemic model with standard incidence rate and its discretization. Progr. Fract. Differ. Appl. 5(4), 297–306 (2019)
Ciancio, A.: Analysis of time series with wavelets. Int. J. Wavelets Multirisol. Inf. Process. 5(2), 241–256 (2007)
Odibat, Z., Baleanu, D.: Numerical simulation of initial value problems with generalized Caputo-type fractional derivatives. Appl. Numer. Math. 156, 94–105 (2020)
Gao, W., et al.: A new study of unreported cases of 2019-nCOV epidemic outbreaks. Chaos Solitons Fract. 138, 109929 (2020)
Nuruddeen, R.I., Nass, A.M.: Exact solitary wave solution for the fractional and classical GEW-Burgers equations: an application of Kudryashov method. Taibah University Journal- Science 12(3), 309–314 (2018)
Ebaid, A., Aljoufi, M.D., Wazwaz, A.M.: An advanced study on the solution of nanofluid flow problems via Adomian’s method. Appl. Math. Lett. 46, 117–122 (2015)
Author information
Authors and Affiliations
Contributions
All authors contributed equally in developing the whole article and granted all the obtained results and revisions. Specifically, “Conceptualization, A.S.H.F. Mohammed and H.O. Bakodah; Methodology, A.S.H.F. Mohammed and H.O. Bakodah; Software, A.S.H.F. Mohammed and H.O. Bakodah; Validation, A.S.H.F. Mohammed and H.O. Bakodah; Writing—Original Draft Preparation, A.S.H.F. Mohammed; Writing—Review & Editing, A.S.H.F. Mohammed and H.O. Bakodah.
Corresponding author
Ethics declarations
Conflicts of interest
The authors declare that they have no conflicts of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Mohammed, A.S.H.F., Bakodah, H.O. Approximate Solutions for Dark and Singular Optical Solitons of Chen-Lee-Liu Model by Adomian-based Methods. Int. J. Appl. Comput. Math 7, 98 (2021). https://doi.org/10.1007/s40819-021-01035-0
Accepted:
Published:
DOI: https://doi.org/10.1007/s40819-021-01035-0