
Abstract
Ant colony optimization (ACO) algorithm is a meta-heuristic and reinforcement learning algorithm, which has been widely applied to solve various optimization problems. The key to improving the performance of ACO is to effectively resolve the exploration/exploitation dilemma. Epsilon greedy is an important and widely applied policy-based exploration method in reinforcement learning and has also been employed to improve ACO algorithms as the pseudo-stochastic mechanism. Levy flight is based on Levy distribution and helps to balance searching space and speed for global optimization. Taking advantage of both epsilon greedy and Levy flight, a greedy–Levy ACO incorporating these two approaches is proposed to solve complicated combinatorial optimization problems. Specifically, it is implemented on the top of max–min ACO to solve the traveling salesman problem (TSP) problems. According to the computational experiments using standard TSPLIB instances, greedy–Levy ACO outperforms max–min ACO and other latest TSP solvers, which demonstrates the effectiveness of the proposed methodology.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Ant colony optimization (ACO) algorithm is a meta-heuristic algorithm based on the ants’ foraging behaviour. ACO algorithm was first proposed in Dorigos doctoral dissertation [11] and more details of this algorithm were provided in paper [14]. The ACO implementation to solve the traveling salesman problem (TSP) and a survey of other ACO applications were presented in paper [12].

ACO prototype (left) and reinforcement learning diagram (right)
Since the birth of the ACO algorithm, there were many researchers conducted in-depth studies and proposed various improved versions. For instance, some variants of ACO such as elite ant colony algorithm [14], rank-based ant colony algorithm [6], max–min ant colony optimization algorithms [42] and ant colony system algorithm [12] were developed. These improved ACOs focused on either selecting which best solutions for pheromone updates or improving the candidate selection mechanism. Furthermore, ACO algorithm was applied not only for solving TSP [1, 12, 17, 28, 48] but also for other optimization problems such as vehicle routing problem (VRP) [5, 18, 33, 38, 39, 53], quadratic assignment problem (QAP) [9, 19], and job-shop scheduling problem (JSP) [24, 25, 54].
In the latest ACO survey papers [13, 29], the authors stated that the most current research activities in this area were focusing on (1) incorporating ACO with other meta-heuristics such as simulate annealing [3, 31, 32], genetic algorithm [8], and tabu search [15], particle swarm optimization [21, 30], and (2) various applications of ACO. Although there are many theoretical studies on the convergence [4, 22, 41], runtime and parameter tuning [10, 34, 43, 55] for ACO, few improved ACO was proposed after the year 2006. Max–min ACO and ant colony system are still state-of-the-art ACOs according to Dorigo and Sttzle’s survey paper in 2019 [13], so max–min ACO is selected in the benchmark of this paper.
ACO is a kind of reinforcement learning algorithm [12, 16]. In Fig. 1, the ants, pheromone, road network in ACO are equivalent to the agents, reward, environment in Reinforcement Learning. “One of the challenges that arise in reinforcement learning, and not in other kinds of learning, is the trade-off between exploration and exploitation” [44]. The proposed greedy–Levy ACO is designed to resolve the exploration/exploitation dilemma.
In reinforcement learning, important exploration strategies include epsilon greedy (\(\epsilon \)-greedy) and Boltzmann exploration (Softmax) policies [44]. The \(\epsilon \)-greedy policy adopts the current best selection from candidates with the probability of \(\epsilon \), and a random selection with the probability of \(1-\epsilon \). Ant colony system (ACS) algorithm employs the \(\epsilon \)-greedy policy and achieves better performance [12]. Greedy–Levy ACO integrates \(\epsilon \)-greedy policy and employs the Levy flight mechanism attempting to improve the \(\epsilon \)-greedy policy further.
In swarm intelligence and evolutionary computation, local search focuses on the feasible neighborhood space of the current solution and seeks better solutions. For a local search, there is no guarantee to obtain a global optimum. Global search tries to explore all feasible solutions in the solution space to achieve the global optimum; however, it is quite time-consuming if not impossible. Combing global and local search is an important research method for swarm intelligence and evolutionary computation [20, 35, 36, 47]. In this paper, the proposed algorithm attempts to balance global and local search by applying epsilon greedy and Levy flight in ACO so that better solutions can be found more efficiently.
The random mechanism is embedded in ACO algorithms, and the probability distribution for choosing the next node to be visited plays a key role in solving a TSP. Among the continuous distributions, one attracting our attention has the property called fat tailed or heavy tailed, which means the tail of this distribution is thicker than others such as normal or exponential distribution. In a fat-tailed distribution case, the tail portion will have a higher probability to be chosen by ACO algorithms for the diversity purpose. Furthermore, the increase in diversity of solutions would be more likely to find an optimal solution. Specifically, Levy distribution possesses the fat-tailed feature and it may help to deliver diversified solutions efficiently.

Selection probability of sorted candidate nodes for a instance with 100 nodes
Levy flight [40] is a type of random walking pattern conforming to Levy distribution named after the French mathematician Paul Levy. The step length of Levy flight follows the fat-tailed distribution. Steps have isotropic random directions when walking in a multi-dimensional space. Many animals’ foraging movements have Levy flight features, e.g., they spend most feeding time around a current food source, and occasionally need long-distance travel to find the next food source efficiently [45, 46]. Levy flight has also been applied to improve other meta-heuristic algorithms such as particle swarm optimization (PSO) [23, 26, 50], artificial bee colony algorithm [2], cuckoo search algorithm [51, 52], etc. Levy flight mechanism has been employed in spatial search approaches, i.e. PSO and cuckoo search algorithm, but cannot directly be applied in ACO without any special design.
In this paper, both \(\epsilon \)-greedy policy and Levy flight approaches are employed in the proposed greedy–Levy ACO aiming to improve searching speed and efficiency and resolve the exploration/exploitation dilemma.
Methods
Candidate selection mechanism in ACO
ACO algorithm consists of three major steps including constructing a solution, optional daemon actions, and pheromone updates. Constructing a solution means to find feasible solutions regarding a specific problem. Daemon actions are some optional operations, i.e., certain local search to improve current solution quality. Updating pheromone according to the solution quality is important for fast convergence and guiding the upcoming ants to seek better solutions in ACO.
Most ACOs employ a uniform-distribution-based random number between 0 and 1 as the probability to select one of the candidates when constructing a feasible solution. In the following discussions, a candidate means a node to be visited by an ant at a certain stage when solving a TSP, and the probability formula to select the next node from candidates is listed in formula (1); the parameter \(\tau \) represents pheromone value and \(\eta \) represents the attractiveness which in most occasions is the reciprocal of edge length between node i and j, \(\alpha \) and \(\beta \) are exponents for \(\tau \) and \(\eta \), respectively.

Normal vs Levy distribution (left) and Levy flight vs Brownian walk (right)
The selection probabilities for candidates are exponentially distributed due to the power function of attractiveness \(\eta \) in formula (1). The list of candidates sorted in descending order of their selection probabilities is called candidate list in the following discussions. The selection probability for a candidate declines quickly with the decreasing of its attractiveness and close to zero if it is not located in the front part of the candidate list. Figure 2 depicts the selection probabilities computed for 5 nodes in the candidate list of a TSP instance with 100 nodes, where the x-axis represents indices of nodes in the candidate list. Since nodes are sorted in descending order of their selection probabilities, a node with a smaller index means its selection probability is relatively higher than those nodes with greater indices. Selection probabilities of most nodes are less than 1% in Fig. 2 which means they almost have no chance to be chosen. This limits the selection for candidates who have a lower probability to be selected and compromise the exploration of solution spaces. The purpose of this paper is to improve the exploration strategy and, therefore, improves the diversity of solutions for achieving a better solution faster.
\(\epsilon \)-Greedy policy
ACO is one type of reinforcement learning algorithm [12, 16]. The \(\epsilon \)-greedy and Softmax policies are important exploration strategies in reinforcement learning [44]. The \(\epsilon \)-greedy policy defines the policy of the selection probability p in formula (2), which focuses on the exploitation with a probability of \(\epsilon \) by using the best candidate while conducting the exploration with a probability of \(1-\epsilon \) by applying \({P_{ij}}\) defined in formula (1). The \(\epsilon \)-greedy policy balances the exploration and exploitation well via parameter \(\epsilon \) and is widely employed in many artificial intelligent algorithms [35,36,37, 49]. The \(\epsilon \)-greedy policy is also adopted in an improved ACO named ant colony system (ACS) as the pseudo-stochastic mechanism [12]. The original \(\epsilon \)-greedy policy uses uniform distribution to select a candidate in the case of \(1-\epsilon \). Levy flight mechanism will be employed to improve the case of \(1-\epsilon \) in this paper.
Levy flight and Levy distribution
The left part of Fig. 3 shows the difference between Levy, normal and Cauchy distributions. Levy distribution is a fat-tailed one in which possibility values at the tail of its curve is larger than other distributions. The right part of Fig. 3 from paper [45] depicts the Brownian motion upon uniform distribution and Levy flight following Levy distribution. The search area covered by Levy flight is much larger than the one by Brownian motion within the same 1000 steps. Part b in the right part of Fig. 3 illustrates the detailed trajectory of corresponding Brownian motion bouncing mainly around the current spot with a step length of 1. In Levy flight, flying distance is defined as the step length in this paper and is sometimes greater than 1.
The standard Levy distribution is given in formula (3):
Formula (3) illustrates how the step length S is computed, which is the most important part of Levy flight. Parameters \(\mu \) and \(\nu \) follow a normal distribution while \(\beta \) is a fixed parameter. Step length is a non-negative random number following Levy distribution and is associated with the direction that is uniformly distributed in two- or three-dimension depending on particular applications. There is no direction needs to be considered when Levy flight is one-dimensional. The step length will be applied as an altering ratio of selection probability to choose a candidate in greedy–Levy ACO.
Integration of epsilon greedy and Levy flight mechanism
Computation of original Levy flight using formula (3) is complicated and cannot directly be employed in ACO. In the proposed greedy–Levy ACO, a Levy flight conversion formula is designed for candidate selection mechanism using formula (6).
Formula (4) is an improved version of formula (3), two normal distribution-based random numbers \(\mu \) and \(\nu \) are required in the latter while only one uniform distribution-based random variable \(P_{\mathrm{{Levy}}}\) is required in the former to reduce computational cost. Altering ratio A and Levy flight threshold \(P_{\mathrm{{threshold}}}\) are fixed parameters in formula (4). Formula (5) is specially designed to ensure that the altered selection probability still ranges between 0 and 1. Formula (6) is derived by combining formulas (4) and (5).
-
\({S_{\mathrm{{new}}}}\): new step length for Levy flight, \({S_{\mathrm{{new}}}} \ge 1\);
-
A: altering ratio for Levy flight, \({A} \ge 0\);
-
\(P_{\mathrm{{threshold}}}\): parameter for Levy flight threshold, \( 0< P_{\mathrm{{threshold}}} < 1\);
-
\(P_{\mathrm{{levy}}}\): probability for turning on/off Levy flight altering, a uniform distribution based random number, \(0< P_{\mathrm{{levy}}} <1\);
-
\(P_{\mathrm{{now}}}\): original selection probability before Levy flight altering, a uniform distribution-based random number, \(0< P_{\mathrm{{now}}} <1\);
-
\(P_{\mathrm{{new}}}\): final selection probability after Levy flight altering, \(0< P_{\mathrm{{new}}} <1\).
Formula (2) of \(\epsilon \)-greedy presents two scenarios in selecting a candidate, (a) choosing the candidate with the maximum probability when p \(\le \) \(\epsilon \), and (b) selecting a candidate randomly when \(p>\epsilon \). Formula (7) is the core design in this paper by replacing the random selection in formula (2) with the Levy flight mechanism in formula (6).
Since the candidate selection mechanism is the only difference between greedy–Levy ACO and max–min ACO, we present the pseudocode of candidate selection mechanism for them in Algorithms 1 and 2, respectively. We refer the interesting reader to the max–min ACO paper [42] for details.


Computational experiments
Data and environment settings
Computational experiments were carried out to benchmark the proposed greedy–Levy ACO against max–min ACO and the last TSP solvers.
The code of greedy–Levy ACO was implemented on the top of publicly available source code http://www.aco-metaheuristic.org/aco-code/ developed by Thomas Sttzle (the author of max–min ACO). The source code covers max–min ACO and other improved ACO algorithms including basic ant system, elitist ACO, rank-based ACO, best–worst ACO and ant colony system. Though TSP is a classic and well-studied combinatorial problem, it is an NP-hard problem used quite often for ACO performance benchmark. Furthermore, max–min ACO source code used in this paper is merely designed for TSP and supports the standard TSPLIB instances with best-known solutions. Every benchmark case ran 100 trials for each TSPLIB instance considering the stochastic property of ACO algorithm, with same parameter setting for all trials on the same computer. Twelve instances including ch150, kroA200, kroB200, gr202, ts225, tsp225, pr226, gr229, gil262, a280, pr299 and lin318 from TSPLIB https://www.iwr.uni-heidelberg.de/groups/comopt/software/TSPLIB95/tsp were selected for the benchmark. Parameters used both in max–min and greedy–Levy ACOs were the same, specifically, the parameter vector (pheromone evaporation rate, alpha, beta, population size) was set to be (0.1, 1, 2, 50). The maximum running time for each trial was 86,400 s attempting to obtain the best-known solutions. Source code and running script of max–min ACO and greedy–Levy ACO are available at https://github.com/akeyliu/greedylevyacotsp/.
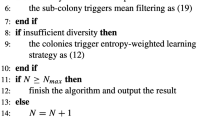
Both max–min ACO and greedy–Levy ACO in this paper employ a pheromone re-initialization mechanism. It monitors the solution procedure continuously and resets all pheromones to their max value when it finds the pheromones are concentrated on few edges and believes the solution procedure is trapped at a local optimum. This mechanism attempts to escape local optima and find the best-known solution within predefined iterations and/or computational time. It helps max–min ACO and greedy–Levy ACO to find the best-known solutions for many small- or medium-scale TSPLIB instances including all ones used in this paper when enough time and iterations are given. During the benchmark, both max–min ACO and greedy–Levy ACO employ other improvement procedures including nearest neighbor and the 3-opt local search. The iterations when the best-known solutions are obtained were recorded for comparison in the experiment as an algorithm performance metric, which includes the iterations of 3-Opt local search which are the major iterations in max–min ACO and greedy–Levy ACO.
The computing environment for the benchmark was Windows 10 \(\times \) 64, CPU 8 cores at 2.7 GHz, Memory 32 GB. The programming language for the implementation is C to keep consistent with max–min ACO algorithm.
Parameters tuning for greedy–Levy ACO
Larger epsilon greedy threshold, smaller Levy flight threshold and Levy flight altering ratio will speed up the convergence, however, easy to fall into local optimal solutions. On the other hand, more exploration will help to seek more solution space and yet require prolonged searching time or more iterations. It is critical to find the most reasonable parameter setting to balance the exploration/exploitation and converge to the optima faster.
Additional computational experiments were conducted for tuning the parameters specific for greedy–Levy ACO, namely epsilon greedy threshold \(\epsilon \), Levy flight threshold \(P_{\mathrm{{threshold}}}\) and Levy flight altering ratio A in formula (7). Twelve instances (ch150, kroA200, kroB200, gr202, ts225, tsp225, pr226, gr229, gil262, a280, pr299 and lin318) were chosen from the TSPLIB instances to perform parameters tuning. For each parameter setting to be evaluated, 100 trials were carried out, and a few metrics are applied to determine the best parameter setting.
Parameter tuning
Parameter \(\epsilon \) in formula (2) varying with value 0, 0.5, 0.6, 0.7, 0.8, 0.9 were evaluated. The larger the \(\epsilon \) value is, the less exploration is. Epsilon greedy will be switched off if \(\epsilon \) value is set to 0.
Parameter Levy flight threshold in formula (2) varying from 0 to 1 with a step length of 0.05 was evaluated and analyzed. The smaller Levy flight threshold is, the more exploration is. Parameter Levy flight altering ratio in formula (2) varying from 0 to 2 with a step length of 0.2 was evaluated as well. The larger Levy flight altering ratio is, the more exploration is. Levy flight will be switched off if Levy flight threshold value is set to 0 or altering ratio is set to 0.
Greedy–Levy ACO degenerates to max–min ACO when epsilon greedy and Levy flight are both switched off.
There were 726 parameter combinations for epsilon, Levy flight threshold and altering ratio in the experiment. Each parameter combination ran 100 trials for all instances and all trials found the best-known solutions.
To measure the effectiveness of certain parameter setting, the metrics called iteration improvement percentage was defined as followed:
For the given set of parameters, let \(N_{mm(i)}\) be the average of iterations to find the best-known solution of the ith instance in 100 trials for max–min ACO while \(N_{gl(i)}\) be the one required for greedy–Levy ACO, then the average of iteration improvement percentage over K instances is defined as \(\sum _{i=1}^{K}(1-N_{gl(i)}/N_{mm(i)})/K\), and K is 12 in our experiment. It is conceivable that the higher the average iterations improvement percentage is, the better the performance of greedy–Levy ACO is for the given parameter setting.
The average of iteration improvement percentage for 726 parameter combinations is illustrated in Fig. 4. No. 609 parameter combination is the best one as shown in Fig. 4 where epsilon is 0.9, Levy flight threshold is 0 and altering ratio is 0.4, and this parameter setting is employed for later computational experiments in the following sections.

Average performance improvement percentage for parameter tuning
Benchmarks between max–min ACO and greedy–Levy ACO
The computational experiments were conducted by employing instances ch150, kroA200, kroB200, gr202, ts225, tsp225, pr226, gr229, gil262, a280, pr299 and lin318 from the TSPLIB, and the results using the suggested parameter setting for greedy–Levy ACO and max–min ACO during the experiments are plotted in Fig. 5.

Benchmark for 12 instances
The histograms in Fig. 5 depict the iterations where the best-known solutions of the tested TSP instances are obtained. The x-axis represents the experiment trials while the y-axis indicates the iterations when the best-known solution is reached. The best-known solutions for all instances were obtained in the experiment. By glancing at these histograms, it appears that the required average of iterations to reach the best-known solutions using greedy–Levy ACO is lower than max–min ACO. It may imply that greedy–Levy ACO can achieve the best-known solutions faster than max–min ACO does.
To validate the above statement statistically, three non-parametric tests called Wilcoxon, rank sums and Mann–Whitney U tests were applied to check if greedy–Levy ACO and max–min ACO perform similarly. For each TSP instance, the iterations of these two algorithms to reach the best-known solutions for all 100 trials were input to the function scipy.stats.wilcoxon(), scipy.stats.ranksums() and scipy.stats.mannwhitneyu() in Python packages. The outcomes are presented in Table 1. P value for a280 and kroA200 is litter higher that means the performances of the compared algorithms are not so differently statistical in solving this instance because the iterations finding the best-known solution is small (about 2000–6000 iterations). For other instances, the performances of underlying algorithms are significantly different since the associated P values are less than 0.05 or even 0.001. Together with the histograms, we conclude that greedy–Levy ACO can achieve best-known solutions faster than max–min ACO.
To demonstrate that the proposed algorithm can indeed reach the best-known solutions faster, further statistical analyses are conducted upon the achieved results. In Table 2, the computational results are listed for greedy–Levy ACO and max–min ACO. The following metrics are applied to both approaches:
-
Average iterations: the average iterations to reach the best-known solution which used to evaluate the performance of the algorithm.
-
Iteration variance: the variance of iterations to reach the best-known solution which applied to judge the stabilization of the algorithm.
Table 2 also presents the improvement magnitude of greedy–Levy ACO over max–min ACO for all tested TSP instances concerning the above metrics. Taking the results shown in Tables 1 and 2 into account, we may conclude that greedy–Levy logic does help to achieve best-known solutions faster.
Ant colony system (ACS) is another state-of-the-art ACO algorithm applied with epsilon greedy strategy [13]. The result of the benchmark between ACS and greedy–Levy ACO is presented in Table 3. The epsilon parameter for ACS is 0.9 which is same in greedy–Levy ACO. The performance of greedy–Levy ACO was better than ACS from the benchmark.
Benchmarks against the latest TSP solver
To benchmark the proposed algorithm against state-of-the-art TSP solvers developed based on ACO, PSO–ACO–3Opt [30] and PACO–3Opt [21] that had been cited the most lately in Google scholar are selected. The algorithms hybridize particle swarm optimization, ant colony optimization and 3-Opt. The corresponding paper presented computational experiments for a set of TSP instances, in which each instance was solved with 20 trials and within max 1000 iterations per trial to evaluate the performance. Specifically, the TSPLIB instances berlin52, ch150, eil101, eil51, eil76, kroA100, kroB200, lin105, rat99 and st70 were employed to perform the corresponding computational experiments.
To conduct a fair comparison, the proposed greedy–Levy ACO was applied to solve the same 10 instances mentioned above, where the best-known solutions were obtained. For each instance, the iterations to achieve the best-known solution for the corresponding 20 trials are listed in Table 4. The best solutions found in 1000 iterations are presented in Table 5. Furthermore, 3-Opt in both greedy–Levy ACO and max–min ACO were enabled.
PSO–ACO–3Opt and PACO–3Opt algorithm could not reach all the best-known solutions within the given 1000 iterations according to the outcomes in papers [21, 30]. The details of the performance comparison between PSO–ACO–3Opt/PACO–3Opt and greedy–Levy ACO within 1000 iterations are presented in Table 6. Given 1000 iterations, the proposed greedy–Levy ACO can achieve better solutions comparing to PSO–ACO–3Opt/PACO–3Opt.
Conclusions
In this paper, the proposed greedy–Levy ACO algorithm was developed on the top of max–min ACO by applying \(\epsilon \)-greedy policy and Levy flight mechanism. The parameters of greedy–Levy ACO were tuned carefully using associated instances. The computational experiments reveal the superiority of the proposed greedy–Levy ACO. It is observed that greedy–Levy ACO can reach the best-known solutions with fewer iterations comparing to max–min ACO algorithm (an average 40.01% deduction in iterations and 50.24% deduction in iteration variance for all tested TSPLIB instances). Further, other ACO researchers may be able to replicate the experiments or improve their ACO algorithm by integrating greedy–Levy mechanism based on the uploaded open-source code.
For future research, we are planning to apply greedy–Levy ACO to other optimization problems, i.e. rich VRP [7, 27].
References
Ariyasingha I, Fernando T (2015) Performance analysis of the multi-objective ant colony optimization algorithms for the traveling salesman problem. Swarm and Evolutionary Computation 23:11–26
Aydoğdu I, Akın A, Saka MP (2016) Design optimization of real world steel space frames using artificial bee colony algorithm with levy flight distribution. Adv Eng Softw 92:1–14
Azar D, Fayad K, Daoud C (2016) A combined ant colony optimization and simulated annealing algorithm to assess stability and fault-proneness of classes based on internal software quality attributes. Int J Artif Intell 14(2):137–156
Badr A, Fahmy A (2004) A proof of convergence for ant algorithms. Inf Sci 160(1–4):267–279
Bell JE, McMullen PR (2004) Ant colony optimization techniques for the vehicle routing problem. Adv Eng Inform 18(1):41–48
Bullnheimer B, Hartl RF, Strauss C (1997) A new rank based version of the ant system. A computational study
Caceres-Cruz J, Arias P, Guimarans D, Riera D, Juan AA (2015) Rich vehicle routing problem: Survey. ACM Comput Surv 47(2):32
Dai Y, Lou Y, Lu X (2015) A task scheduling algorithm based on genetic algorithm and ant colony optimization algorithm with multi-QoS constraints in cloud computing. In: 2015 7th international conference on intelligent human-machine systems and cybernetics, IEEE, vol 2, pp 428–431
Demirel NÇ, Toksarı MD (2006) Optimization of the quadratic assignment problem using an ant colony algorithm. Appl Math Comput 183(1):427–435
Doerr B, Neumann F, Sudholt D, Witt C (2011) Runtime analysis of the 1-ant ant colony optimizer. Theoret Comput Sci 412(17):1629–1644
Dorigo M (1992) Optimization, learning and natural algorithms. PhD Thesis, Politecnico di Milano
Dorigo M, Gambardella LM (1997) Ant colony system: a cooperative learning approach to the traveling salesman problem. IEEE Trans Evol Comput 1(1):53–66
Dorigo M, Stützle T (2019) Ant colony optimization: overview and recent advances. Handbook of metaheuristics. Springer, Berlin, pp 311–351
Dorigo M, Maniezzo V, Colorni A et al (1996) Ant system: optimization by a colony of cooperating agents. IEEE Trans Syst Man Cybern B Cybern 26(1):29–41
Drias Y, Kechid S, Pasi G (2016) A novel framework for medical web information foraging using hybrid aco and tabu search. J Med Syst 40(1):5
Gambardella LM, Dorigo M (1995) Ant-q: a reinforcement learning approach to the traveling salesman problem. Machine learning proceedings 1995. Elsevier, New York, pp 252–260
Gambardella LM, Dorigo M (1996) Solving symmetric and asymmetric TSPS by ant colonies. In: Proceedings of IEEE international conference on evolutionary computation, IEEE, pp 622–627
Gambardella LM, Taillard É, Agazzi G (1999) Macs-vrptw: A multiple colony system for vehicle routing problems with time windows. In: New ideas in optimization, Citeseer
Gambardella LM, Taillard ÉD, Dorigo M (1999) Ant colonies for the quadratic assignment problem. J Oper Res Soc 50(2):167–176
Guimarães FG, Campelo F, Igarashi H, Lowther DA, Ramírez JA (2007) Optimization of cost functions using evolutionary algorithms with local learning and local search. IEEE Trans Magn 43(4):1641–1644
Gülcü Ş, Mahi M, Baykan ÖK, Kodaz H (2018) A parallel cooperative hybrid method based on ant colony optimization and 3-opt algorithm for solving traveling salesman problem. Soft Comput 22(5):1669–1685
Gutjahr WJ (2002) Aco algorithms with guaranteed convergence to the optimal solution. Inf Process Lett 82(3):145–153
Hariya Y, Kurihara T, Shindo T, Jin’no K (2015) Lévy flight PSO. In: 2015 IEEE congress on evolutionary computation (CEC), IEEE, pp 2678–2684
Heinonen J, Pettersson F (2007) Hybrid ant colony optimization and visibility studies applied to a job-shop scheduling problem. Appl Math Comput 187(2):989–998
Huang RH, Yang CL, Cheng WC (2013) Flexible job shop scheduling with due windowa two-pheromone ant colony approach. Int J Prod Econ 141(2):685–697
Jensi R, Jiji GW (2016) An enhanced particle swarm optimization with levy flight for global optimization. Appl Soft Comput 43:248–261
Lahyani R, Khemakhem M, Semet F (2015) Rich vehicle routing problems: from a taxonomy to a definition. Eur J Oper Res 241(1):1–14
Li Y, Gong S (2003) Dynamic ant colony optimisation for TSP. Int J Adv Manuf Technol 22(7–8):528–533
López-Ibáñez M, Stützle T, Dorigo M (2016) Ant colony optimization: a component-wise overview. Handbook of heuristics, pp 1–37
Mahi M, Baykan ÖK, Kodaz H (2015) A new hybrid method based on particle swarm optimization, ant colony optimization and 3-opt algorithms for traveling salesman problem. Appl Soft Comput 30:484–490
Mohsen AM (2016) Annealing ant colony optimization with mutation operator for solving tsp. Comput Intell Neurosci 2016:20
Moussi R, Euchi J, Yassine A, Ndiaye NF et al (2015) A hybrid ant colony and simulated annealing algorithm to solve the container stacking problem at seaport terminal. Int J Oper Res 24(4):399–422
Narasimha KV, Kivelevitch E, Sharma B, Kumar M (2013) An ant colony optimization technique for solving min-max multi-depot vehicle routing problem. Swarm Evol Comput 13:63–73
Neumann F, Witt C (2009) Runtime analysis of a simple ant colony optimization algorithm. Algorithmica 54(2):243
Qian C, Yu Y, Zhou ZH (2015) Pareto ensemble pruning. In: Twenty-ninth AAAI conference on artificial intelligence
Qian C, Shi JC, Tang K, Zhou ZH (2017) Constrained monotone \( k \)-submodular function maximization using multiobjective evolutionary algorithms with theoretical guarantee. IEEE Trans Evol Comput 22(4):595–608
Raykar V, Agrawal P (2014) Sequential crowdsourced labeling as an epsilon-greedy exploration in a Markov decision process. In: Artificial intelligence and statistics, pp 832–840
Reed M, Yiannakou A, Evering R (2014) An ant colony algorithm for the multi-compartment vehicle routing problem. Appl Soft Comput 15:169–176
Schyns M (2015) An ant colony system for responsive dynamic vehicle routing. Eur J Oper Res 245(3):704–718
Shlesinger MF, Klafter J (1986) Lévy walks versus lévy flights. On growth and form. Springer, Berlin, pp 279–283
Stutzle T, Dorigo M (2002) A short convergence proof for a class of ant colony optimization algorithms. IEEE Trans Evol Comput 6(4):358–365
Stützle T, Hoos HH (2000) Max-min ant system. Future Gener Comput Syst 16(8):889–914
Stützle T, López-Ibánez M, Pellegrini P, Maur M, De Oca MM, Birattari M, Dorigo M (2011) Parameter adaptation in ant colony optimization. Autonomous search. Springer, Berlin, pp 191–215
Sutton RS, Barto AG (2018) Reinforcement learning: an introduction. MIT Press, New York
Viswanathan GM (2010) Ecology: fish in lévy-flight foraging. Nature 465(7301):1018
Viswanathan GM, Afanasyev V, Buldyrev S, Murphy E, Prince P, Stanley HE (1996) Lévy flight search patterns of wandering albatrosses. Nature 381(6581):413
Weise T, Wu Y, Chiong R, Tang K, Lässig J (2016) Global versus local search: the impact of population sizes on evolutionary algorithm performance. J Glob Optim 66(3):511–534
Hf Wu, Chen XQ, Mao QH, Zhang QN, Zhang SC (2013) Improved ant colony algorithm based on natural selection strategy for solving TSP problem. J China Inst Commun 34(4):165–170
Wunder M, Littman ML, Babes M (2010) Classes of multiagent q-learning dynamics with epsilon-greedy exploration. In: Proceedings of the 27th international conference on machine learning (ICML-10), Citeseer, pp 1167–1174
Yan B, Zhao Z, Zhou Y, Yuan W, Li J, Wu J, Cheng D (2017) A particle swarm optimization algorithm with random learning mechanism and levy flight for optimization of atomic clusters. Comput Phys Commun 219:79–86
Yang XS, Deb S (2009) Cuckoo search via lévy flights. In: 2009 world congress on nature and biologically inspired computing (NaBIC), IEEE, pp 210–214
Yang XS, Deb S (2014) Cuckoo search: recent advances and applications. Neural Comput Appl 24(1):169–174
Yu B, Yang ZZ, Yao B (2009) An improved ant colony optimization for vehicle routing problem. Eur J Oper Res 196(1):171–176
Zhang J, Hu X, Tan X, Zhong JH, Huang Q (2006) Implementation of an ant colony optimization technique for job shop scheduling problem. Trans Inst Meas Control 28(1):93–108
Zhou Y (2009) Runtime analysis of an ant colony optimization algorithm for TSP instances. IEEE Trans Evol Comput 13(5):1083–1092
Acknowledgements
This work was partially supported by the National Natural Science Foundation of China under Grant number 41771410.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Liu, Y., Cao, B. & Li, H. Improving ant colony optimization algorithm with epsilon greedy and Levy flight. Complex Intell. Syst. 7, 1711–1722 (2021). https://doi.org/10.1007/s40747-020-00138-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40747-020-00138-3