
Abstract
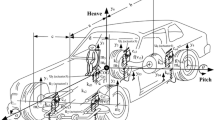
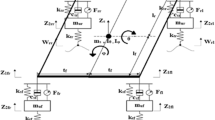
Suspension system of a vehicle is used to minimize the effect of different road disturbances on ride comfort and to improve the vehicle control. The main objective of this work is to design an efficient active suspension control paradigm for full car model with 8 degrees of freedom using adaptive soft-computing techniques. The detailed mathematical model of the adaptive Mamdani fuzzy logic control and different adaptive neurofuzzy wavelet networks have been developed and successfully applied to a full car model. The parameters of the proposed controllers have been adjusted using online adaptation by minimizing the cost function. The robustness of the presented active controllers has been proved on the basis of different performance indices. Two road profiles have been used to check the performance of the proposed active suspension controllers as compared with passive, semi-active suspension, backstepping based fuzzy logic control, and linear quadratic regulated based suspension systems. The performance of the active suspension systems has been optimized in terms of displacement and acceleration of seat, heave, pitch, and roll.

Similar content being viewed by others

References
Tseng, T.; Hrovat, D.: Some characteristics of optimal vehicle suspensions based on quarter-car models. In: Proceedings of the 29th IEEE Conference on Decision and Control, vol. 4, pp. 2232–2237 (1990)
Chantranuwathana, S.; Peng, H.: Adaptive robust control for active suspensions, In: Proceedings of American Control Conference, vol. 3, pp. 1702–1706 (1999)
Ekoru, J.E.D.; Dahunsi, O.A.; Pedro, J.O.: Direct adaptive neural control of a quarter car active suspension system. IEEE AFRICON, vol. 1, pp. 1–6 (2011)
Sun, P.Y.; Chen, H.: Multiobjective output-feedback suspension control on a half-car model. In: Proceedings of the IEEE Conference on Control Applications, vol. 1, pp. 290–295 (2003)
Sun, W.; Gao, H.; Kaynak, O.: Finite frequency H∞ control for vehicle active suspension systems. In: IEEE Transactions on Control Systems Technology, vol. 19, pp. 416–422 (2011)
Darus, R.; Sam, Y.M.: Modeling and control active suspension system for a full car model. In: 5th IEEE International Colloquium on Signal Processing and Its Applications, p. 1318 (2009)
Basari, A.A.; Sam, Y.M.; Hamzah, N.: Nonlinear active suspension system with backstepping control strategy. In: 2nd IEEE Conference on Industrial Electronics and Applications, ICIEA, pp. 554–558 (2007)
Uys P.E., Els P.S., Thoresson M.: Suspension settings for optimal ride comfort of road vehicles traveling on roads with different roughness and speeds. J. Terramech. 44(2), 163–175 (2007)
Farazandeh, A.; Kazemi, R.: Fuzzy control for active suspension in ADAMS/car full vehicle. In: Chinese Control Conference, pp. 1188–1193 (2006)
Hampo, R.; Marko, K.: Neural network architectures for active suspension control. In: IJCNN-91-Seattle International Joint Conference on Neural Networks, vol. 2, pp. 765–770 (1991)
Aldair, A.; Wang, W.J.: Adaptive neuro fuzzy inference controller for full vehicle nonlinear active suspension systems. In: 1st International Conference on Energy, Power and Control (EPC-IQ), pp 97–106 (2010)
Zapateiro M., Luo N., Karimi H.R., Veh J.: Vibration control of a class of semiactive suspension system using neural network and back stepping techniques. Mech. Syst. Signal Process. 23(6), 1946–1953 (2009)
Wang, L.; Zhang, N.; Du, H.: Design and experimental investigation of demand dependent active suspension for vehicle rollover control. In: 28th Chinese Conference on Decision and Control, pp. 5158–5163 (2009)
Lin T.C., Roopaei M., Chen M.C.: Car suspension control by indirect adaptive interval type-2 fuzzy neural network control. World Appl. Sci. J. 8(5), 555–564 (2010)
Cheng, C.-P.; Chao, C.-H., Li, T.H.: Design of observer-based fuzzy sliding-mode control for an active suspension system with full-car model. In: IEEE International Conference on Systems Man and Cybernetics (SMC), pp. 1939–1944 (2010)
Campos, J.; Lewis, F.L.; Davis, L.; Ikenaga. S.: Backstepping based fuzzy logic control of active vehicle suspension systems. In: Proceeding of American Control Conference, Chicago, pp. 4030–4035 (2000)
Thompson A.G., Davis B.R.: Computation of the rms state variables and control forces in a half-car model with preview active suspension using spectral decomposition methods. J. Sound Vibration 285(3), 571–583 (2005)
Thompson A.G., Pearce C.E.M.: Physically realizable feedback control for a half-car model. Vehicle Syst. Dyn. 30(1), 17–35 (1998)
Zeineldin, E.F.; El-Saadany, M.M.A.: Fault location for a series compensated transmission line based on wavelet transform and an adaptive neuro-fuzzy inference system. In: IEEE Electric Power Quality and Supply Reliability Conference (PQ), pp. 229–236 (2010)
Rahmi G.: Active control of seat vibrations of a vehicle model using various suspension alternatives. Turk. J. Eng. Environ. Sci. 27, 361–373 (2003)
Baumal A.E., McPhee J.J., Calamai P.H.: Application of genetic algorithms to the design optimization of an active vehicle suspension system. Comput. Methods Appl. Mech. Eng. 163(1), 87–94 (1998)
Darus, R.: Modeling and control of active suspension for a full car model. Master dissertation, Universiti Teknologi Malaysia, Faculty of Electrical Engineering (2008)
Hana, D.: PID controller design for semi-active car suspension based on model from intelligent system identification. In: Second International Conference on Computer Engineering and Applications, vol. 2, pp. 60–63 (2010)
Chen Y.: Skyhook surface sliding mode control on semi-active vehicle suspension system for ride comfort enhancement. Eng. Sci. Res. 1(1), 23–32 (2009)
Lieh, J.; Li, W.J.: Adaptive fuzzy control of vehicle semi-active suspensions. In: Proceedings of ASME Dynamic Systems Control Division, vol. 61, pp. 293–297 (1997)
Rao M., Prahlad V.: A tunable fuzzy logic controller for vehicle-active suspension systems. Fuzzy Sets Syst. 85(1), 11–21 (1997)
Zadeh L.: Fuzzy sets. Inf. Control. 8(3), 338–353 (1965)
Zadeh L.: Outline of new approach to the analysis of complex systems and decision processes. IEEE Trans. Syst. Man Cybern. 1, 28–44 (1973)
Mamdani E.H., Assilian S.: An experiment in linguistic synthesis with a fuzzy logic controller. Int. J. Man Mach. Stud. 7, 1–13 (1975)
Braae M., Rutherford D.E.: Theoretical and linguistic aspects of the fuzzy logic controller. Automatica 5(11), 553–577 (1979)
Ostergaard, J.J.: Fuzzy logic controller of a heat exchanger process. Fuzzy Autom. Decis. Process., 285–320 (1977)
Pappus C.P., Mamdani E.H.: A fuzzy logic controller for a traffic junction. IEEE Trans. Syst. Man Cybern. 7(6), 707–712 (1977)
Holmblad, L.P.; Ostergaard, J.J.: Control of a cement kiln by fuzzy logic. Fuzzy Inf. Decis. Process., 389–399 (1982)
Lin, F.; Brandt, R.D.; Saikalis, G.: Self-tuning of PID controllers by adaptive interaction. In: Proceedings of the American Control Conference, Chicago, vol. 5, pp. 3676–3681 (2000)
Marino R., Peresada S., Valigi P.: Adaptive input–output linearization control of induction motors. IEEE Trans. Autom. Control. 38(2), 208–221 (1993)
Oussar Y., Dreyfus G.: Initialization by selection for wavelet network training. Neurocomputing 34(1), 131–143 (2000)
Zhang Q., Benveniste A.: Wavelet networks. IEEE Trans. Neural Netw. 3(6), 889–898 (1992)
Chen Y., Yang B., Dong J.: Time-series prediction using a local linear wavelet, neural network. Neurocomputing 69(4), 449–465 (2006)
Zhang J., Walter G., Miao Y., Lee W.: Wavelet neural networks for function, learning. IEEE Trans. Signal Process. 43(6), 1485–1497 (1995)
Zhang Q.: Using wavelet networks in nonparametric estimation. IEEE Trans. Neural Netw. 8(2), 227–236 (1997)
Billings S.A., Wei H.L.: A new class of wavelet networks for nonlinear system, identification. IEEE Trans. Neural Netw. 16(4), 862–874 (2005)
Abiyev R.H., Kaynak O.: Fuzzy wavelet neural networks for identification and control of dynamic plants, a novel structure and a comparative study. IEEE Trans. Ind. Electron. 55(8), 3133–3140 (2008)
Ho D.W., Zhang P.A., Xu J.: Fuzzy wavelet networks for function learning. IEEE Trans. Fuzzy Syst. 16(4), 200–211 (2001)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Khan, L., Qamar, S. & Khan, M.U. Comparative Analysis of Adaptive NeuroFuzzy Control Techniques for Full Car Active Suspension System. Arab J Sci Eng 39, 2045–2069 (2014). https://doi.org/10.1007/s13369-013-0729-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13369-013-0729-4