
Abstract
Combining photogrammetric reconstruction (close-range photogrammetry, CRP) and airborne photogrammetry through the structure from motion method (SFM) with terrestrial three-dimensional (3D) laser scanning (TLS), Maelstrom Cave on Big Island, Hawaii (USA), was mapped in three dimensions. The complementary properties of the two methods generated an overall model that depicted significant features of the cave both spatially and visually. Through various processes, the complex geometric quantities were derived from the model that can be used to answer microbiological and climatological questions. In this report, the procedure for the three-dimensional acquisition of the terrain surface above Maelstrom Cave as well as the interior of the cave with TLS and SFM is described. It is shown how the different data sets were combined and contrasted, including a comparison of geometries from the different survey operations. Finally, the editing processes used to quantify and simplify the cave geometry are presented, as well as the analysis of the ellipses generated accordingly to determine the geometric quantities. Through the analysis of the cave geometry, important geometric properties of the Maelstrom Cave could be quantified and categorized. In this way, an effective tool was developed to directly correlate the structure of the cave system with climatological and microbiological parameters in order to answer the corresponding questions.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
The ability to record and map cave morphology and topology has improved significantly in recent decades (Collon et al. 2017; Lee 2018; Talha and Fritsch 2019; Waele et al. 2018; Weishampel et al. 2011). The use of terrestrial laser scanning (TLS) enables measurements with high accuracy and relatively short time intervals (Collon et al. 2017; Gallay et al. 2015). Compared to conventional mapping methods (Goldscheider and Drew 2007), TLS maps geometry with a high point density of up to several million points per second, enabling the capture of extensive information about structure and geometry (Gallay et al. 2015, 2016). This method can also be performed in absolute darkness, making it well suited for studies of (lava) cave systems (Kereszturi et al. 2012). The accuracy of the acquired data is usually so high that the data sets can be used to validate other acquisition techniques, for example, ground penetrating radar (GPR) (Esmaeili et al. 2020).
The photogrammetric reconstruction using the structure from motion method (SFM) is another technique that can be used to image surfaces and objects. Using mathematical operations, it is possible to create a three-dimensional (3D) object based on spatially overlapping photographic images. This method was first introduced in the nineteenth century (Meydenbauer 1867). At that time, it was very costly to determine geometric properties based on photographs. Nowadays, computers can process a large amount of data in a short time (Collon et al. 2017) by using appropriate software solutions. Together with tacheometry, these three techniques are mainly used to generate 3D datasets (Triantafyllou et al. 2019).
SFM and TLS can be combined and complemented in many ways. For example, by combining TLS data of a cave system with the terrain surface reconstructed by SFM above it, the position of a cave system below the terrain surface can be determined (Gallay et al. 2015). Complementary data analysis and extensive comparisons of measurement techniques have already been performed in diverse disciplines such as surveying (Mulsow et al. 2019), archeology (Marín-Buzón et al. 2021), and civil engineering (El-Din Fawzy 2019).
Photorealistic, photogrammetric reconstruction of objects offers the advantage of extremely realistic visual mapping. Some modern laser scanning systems can similarly overlay scan data with photographic images to add color information to the scan data points. Photogrammetry has already been used to reconstruct cave geometries (Lee 2018). However, photographing in a cave for photogrammetric reconstruction is challenging. Illuminating dark areas and minimizing shadowing require the use of intense light sources with high energy consumption, which in such challenging survey areas involves a high degree of preparation.
The term lava cave generally refers to cavities and other cave-like openings of volcanic origin (White 2010). Due to their genesis and morphology, lava caves differ considerably from other cave types. Depending on the amount and duration of the runoff, the morphological conditions of the site and the viscosity of the lava, more or less large and complex cave systems are formed. General characteristics and types of lava tubes are described by Sawłowicz (2020).
The combined use of TLS and SFM in caving has two very specific applications. These are climatological cave research and microbiological research in caves. The factors influencing the climatology of lava caves are not well known yet. Lava caves are usually located at shallow depths (from < 1 m to a few meters) below the surface. Therefore, the temperature of a cooled lava cave is not determined by the mean temperature of the surrounding rock (as can be the case with deep caves) or by geothermal energy, but by the outside and surface temperatures and cave geometry.
Consequently, it is expected that the thermal conditions in a lava cave will be significantly determined by the soil heat flux, the infiltrating precipitation water, and the airflow through the cave entrances.
In contrast to air temperature, which becomes more constant with increasing distance from sky lights or entrances, flow patterns can vary greatly well into the cave (Pflitsch et al. 2016). Here, cave morphology appears to be the critical factor in the appearance (strength and constancy) of air currents, so accurate information on this is essential.
We hypothesize that the occurrence of air currents, in turn, has a high influence on transpiration as well as condensation processes.
A variety of different microbiological life forms exist in lava caves, which have already been identified in different cave systems in Hawaii. Brown et al. (2007) describe the high bacterial diversity in Hawaiian lava caves and emphasize the different evolutionary stages of microorganisms. In comparison to Mexican microbial mats, some similarities were found, but not explained in detail. Hathaway et al. (2014), on the other hand, found great differences when comparing microbial mats in lava caves in Hawaii and the Azores. Thereby, they question the traditional view that microbial mats in similar environments are also composed of similar microorganisms. Furthermore, they assume that lava is not the determining factor for the composition of microbial mats. Instead, other abiotic factors (e.g., air temperature and humidity or the length of the cave) play a greater role. Therefore, they stress the urgent need for research about the relationship between cave atmosphere and the formation of microbial mats in lava caves.
Previous investigations usually refer to selective measurements of the mentioned parameters, which then have to be extrapolated to the whole cave. This process is very difficult due to the highly complex structure of caves, which refers to all scales. Here, appropriate simulations can provide considerable assistance, which in turn requires a cave model that is as accurate as possible. While a coarse-resolution cave model is able to represent the general or large-scale airflow patterns of an entire cave, the assessment of individual segments such as alcoves, vertical and horizontal cross-sectional changes, or special wall structures requires higher resolutions down to the microscale. At all levels, the method described above can provide valuable information.
Once the microclimatic conditions of a cave system are known, these can be related in a further step to the growth and occurrence of secondary minerals as well as microorganisms such as bacteria, archaea, fungi, and the mats or slime deposits in which they occur. Thus, the relationships between cave structure, climatology, and living organisms can be established.
The investigation carried out and presented here served for the initial investigation of the following hypotheses.
-
The climatological characteristics of a cave, and in particular the airflow regime, are strongly dependent on cave morphology, which applies to all scales.
-
Individual cave sections can be categorized, and the same and adjacent categories have the same or at least similar climatic conditions. We hypothesize that categories with different climatic conditions will show differences in their microbial community makeup.
-
We further hypothesize that different secondary minerals and microorganisms will be characteristic of different individual categories.
-
We hypothesize that microbial community makeup is influenced by cave morphology and microclimatic conditions, especially airflow.
In this study, about 315 m of the Maelstrom section of the Kipuka Kanohina Cave Systems on Big Island, Hawaii (USA), was mapped using terrestrial laser scanning (cave), airborne photogrammetry (ground surface), and close-range photogrammetry (cave). Data collected during a research trip in February/March 2020 were combined in a 3D model to answer microbiological and climatological questions. To this end, the extensive amount of data was simplified using various software solutions and mathematical methods, resulting in an idealized cave geometry from which various geometric attributes could be derived. The simplification of the data will demonstrate how a cave system can be mapped by its basic geometric properties to help answer microbiological and climatological questions in future studies.
This documentation describes the data collection in the field and the post-processing methods used to simplify the data.
Maelstrom Cave system
Maelstrom Cave is part of a labyrinthine cave system called the Kipuka Kanohina Cave System. It is located in the community of Ocean View in the southwest of the island of Hawaii, in the desert of Ka’u, largely situated 72 km south of Kailua-Kona and 30 km north of Ka Lae (the southernmost point in the USA) (Cave Conservancy of Hawai'i 2003).
The cave system is located on the southwest flank of Mauna Loa volcano, and the explored length within the system is approximately 25 km with a vertical extent of 204 m, which should not be mistaken for the depth below the Earth’s surface. This makes it the second largest lava system in the world (Cave Conservancy of Hawai'i 2003). The system is managed by the Cave Conservancy of Hawai’i under the Kipuka Kanohina Cave Preserve Management Committee. The system’s management plan describes the complex as “highly braided and mazy” (Cave Conservancy of Hawai'i 2003). The different passages are located at different levels, and passages may merge into each other. Individual sections of the Kipuka Kanohina Cave System have their own names and are also studied as respective caves (e.g., Akeakamai, Goat Bone, Maelstrom or Tapa).
Different sections are characterized by features. A cave may have artifacts of early Hawaiian cultures or be characterized by unusual gypsum deposits or biological populations (Cave Conservancy of Hawai'i 2003).
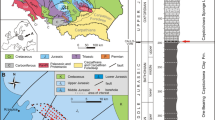
The 1996 Wolfe and Morris geologic map (Fig. 1) indicates that the Maelstrom Cave was formed within basaltic lava flows of Mauna Loa, which have pahoehoe, as well as lava (Wolfe and Morris 1996). Spatially, the cave is very close to the southwestern rift zone of this shield volcano (Wolfe and Morris 1996). Therefore, the whole area is located in volcano hazard area zone 2 (zones are ranked from 1 to 9 and describe the probability of coverage by lava flows, Cave Conservancy of Hawai'i 2003). The age of the tholeiitic Kau basalt there is between 750 and 1500 years old; also, the formation of the caves is classified in the same time period (Wolfe and Morris 1996). The following eruptions have caused the complex to grow.

Geologic map of Big Island, Hawaii (Wolfe and Morris 1996, edited, left), two-dimensional site plan of the Kipuka Kanohina Cave System in the Maelstrom Cave area (upper right corner) and longitudinal section through the total point cloud in the area of the breakdown room with an indication of relevant reference heights (lower right corner)
The lava cave runs near the surface on a horizontal plane that slopes slightly toward the south and has no other level. The passages of the lava cave run downhill from the entrance toward the Pacific Ocean. The Maelstrom extends over a known length of about 536 m, of which about 315 m were scanned by TLS. There is a difference of 24.1 m between the main opening (471.0 m a.s.l.) and the end of the scanned area (446.9 m a.s.l.). The average slope was calculated to be approximately − 4.3°. The cave ceiling is, on average, 4.6 m below the ground surface, with the thickest ceiling extension before the end of the survey section being 7.7 m.
The extended main entrance area opens in a larger hall, from which three passages lead off. They fork with the respective adjacent passage to superimposed Ypsilos (Y), at the opening of which another Ypsilon (- < > -) connects the branches again to one. Two parallel passages follow the slope downward until, after about 300 m, another branching follows. There is a junction of the previously parallel passages. Before and after the section, the Maelstrom section merges with other parts of the Kipuka Kanohina Cave System. Orthogonally, the cave structure, especially in the region of the cave entrance, seems to be braided. In Egozi and Ashmore (2008) and in Howard et al. (1970), the topological and geometrical properties of braided streams are analyzed, whose structure and course can be compared to that of cave systems.
Figure 1 shows the orthogonal view of the Kipuka Kanohina Cave System in the Maelstrom section. The plan results from the previous mapping, using conventional survey techniques. The black coloring results from TLS. The overlay of the datasets shows a high correspondence in the respective data acquisition.
Breakdown room
An interesting area in the system section of Maelstrom Cave is the breakdown room. About 120 m inside the main entrance, the passage is partly enclosed by two ceiling breakdowns. The breakdown room is approx. 21.7 m long with a ceiling thickness of 5.4 m (Fig. 1). The floor is very uneven, as individual rock fragments have fallen from the cave ceiling and are scattered throughout the room. The first large ceiling breakdown at the beginning of the room has accumulated a lot of ceiling material on the cave floor, creating a rock wall of approx. 4.6 m in height. The breakdown has decreased the height above the top of the breakdown to the ground surface to a thickness of approx. 1.3 m. The impacted cross-section presents a significant obstacle. The second breakdown, which encloses the room, is only about 2.0 m high and reduces the area of the cross-section significantly. Overall, the chamber, like the overall course of the cave, follows the gradient of the volcanic flank in a southwesterly direction (Wolfe and Morris 1996).
The breakdown room is of great importance, as the room-like structure results in exceptional climatic conditions.
Mineral crusts vs. microorganisms
The microbial diversity in lava caves is different in each cave, with some overlap among caves, as the occurrence depends on the specific conditions at each site. This results in high variability in the type of microbial deposit found (Engel 2015). Lava caves are colonized by microorganisms entering through a variety of means, including being carried into the cave by air currents, infiltrating water and soil, minerals from the surface, and by animals and humans. Which ones survive depends on their ability to surface the cave conditions and to obtain carbon if they are heterotrophs, or different reduced minerals within the lava if they are chemolithotrophs, and additional nutrients needed for their survival. The lack of sunlight in most of the cave will eliminate the possibility of phototrophs that rely on sunlight. Many of the chemolithotrophic microorganisms will produce acids as part of their metabolism, which will provide access to needed nutrient sources within the basalt. In addition, the chemical weathering of cave rock provides other essential minerals that support plants and microorganisms (Gleeson et al. 2007). The organisms on the surface lead to changes in the rock structure, as well as the structure of microbial communities. The elements precipitated during weathering (e.g., K, Mg, Cu, P, C, and N) provide the nutrient for the growth of microorganisms.
The Maelstrom Cave has six different types of minerals and microb deposits during microbiological mapping (March 2020). Detected were mineral crusts, coralloids, and spheroids, which belong to minerals, and Ooze (Fig. 2), microbial mats or colonies and Moonmilk (fluffy or crunchy), which belong to microbio deposits. A special mineral crust occurs in the study area: blue-green stalactite (Fig. 2). This is an amorphous copper silicate-containing deposit, which according to Spilde is rare and unusual (Spilde et al. 2016).

Ooze (upper image) and blue-green copper-basaltic stalactite (lower image) inside Maelstrom Cave. The Ooze deposit in low airflow areas on the walls of Maelstrom Cave contains a wealth of microorganisms
It consists of reticulated filaments and fuzzy microbial morphologies (Northup et al. 2011a). The amorphous copper silicate can form a stalactite-like structure on the cave ceiling or surface (Northup et al. 2011b; White 2010). A 2004 analysis via X-ray emission spectrum (Kipuka Kanohina, Tapa Street section) demonstrated a non-crystalline structure composed of the dominant elements silicate (Si), copper (Cu), calcium (Ca), and aluminum (Al) (White 2010). Microorganisms that are part of mineral deposits and not mainly microbial are grouped under the collective heading of secondary mineral deposits. Mineral crusts belong to this major group.
We hypothesize mineral crusts prefer dry and windy sites. In these areas, they can become very thick. With increasing air humidity, their occurrence decreases. In areas with constant high humidity around saturation and condensation, mineral crusts usually do not occur. Only periodic high humidity can be tolerated. Accordingly, they are often found in the entrance area, but also in other windy areas of the cave, which dry out repeatedly (Pflitsch et al. 2016). The blue-green stalactites or deposits are an extremely rare speleological object. The site conditions inside the Maelstrom Cave allow the growth of a blue-green stalactite, despite the relatively large distance to the entrance area, which shows once more that the climatology inside lava caves needs further investigation to explain such microbiological occurrences. Additionally, Hathaway et al. (2014) showed that Hawaiian lava has a higher percentage of copper than found in the lava caves within the Azorean lava caves, which may contribute to their presence in Hawaiian lava caves. Scanning electron microscopy and genetic sequencing of the Maelstrom blue-green deposits reveal a wealth of microorganisms within the deposits. These deposits are also found in some New Mexican (USA) lava caves.
Methods
Terrestrial laser scanning for 3D measurements
The distance measurement inside the cave was performed with a FARO Focus 3D 120 laser scanner. The cave geometry was mapped by combining many individual scans using reference spheres. Alignment of two individual TLS using reference spheres can be done if at least three reference spheres are placed at the same location in both scans. A total of ten different reference spheres were used in this study. In addition to these targets, several ground control points (GCP) were placed in areas of high biological and climatological interest within Maelstrom Cave. The GCP were used to combine photogrammetry data with the laser scanning results (see “Combining data” and “SFM and TLS”).
The measurements were performed at 121 different positions. Each scan consisted of about 11∙106 single measurement points. In previous studies, this scan resolution had been shown to produce good processing results. At this resolution, the cave geometry is represented in great detail and the point density on the reference spheres is high enough to ensure proper alignment of the scans.
The combination of each laser scan using the reference spheres resulted in a total point cloud with 1.33∙109 measurement points (unfiltered), including all side arms and branches.
When aligning the individual TLS, a filter was used on each scan to remove points with a distance greater than 20.0 m from the laser scanner from each data set. The aim of this process was to reduce data noise due to overlapping measurements from different laser scans. For this filter, the setting of different distances was tested, while the distance of 20.0 m gave good results and low data noise in the merged point cloud. The filtered point cloud consisted of 1.22∙109 inhomogeneously distributed survey points. Homogeneous imaging of the cave surface by 3D laser scanning is not possible in principle because the laser grid on the cave wall varies depending on the distance to the laser scanner and the topography of the cave surface (Baltsavias 1999).
Due to a lack of georeferencing, the survey points from the TLS were positioned in a local coordinate system, which was used to combine with the survey data from aerial photography and close-range photogrammetry.
The TLS datasets inside the cave were supplemented with TLS data of the terrain surface in the area of the cave entrance, which were taken to acquire additional GCP and thus to combine with the data from aerial photogrammetry. “Combining data” describes the procedure in more detail.
Photogrammetric reconstruction of Maelstrom Cave
Airborne photogrammetry
The photos of the terrain surface for the photogrammetric geometry calculation were taken with a DJI Phantom 4 RTK drone (unmanned aerial vehicle, UAV). Based on the photos, a 3D reconstruction of the terrain surface was created using the SFM method. The resulting dense point cloud consisted of 151∙106 points.
Close-range photogrammetry
In local areas inside the Maelstrom Cave, previous investigations have already detected the presence of various microbiological organisms both visually and by laboratory analyses (see “Mineral crusts vs. microorganisms”). The purpose of this research was to determine if photogrammetric reconstruction of areas in which these organisms were detected inside the cave was possible. To this end, several local areas were photographed using a single-lens reflex (SLR) camera. Similar to the aerial photography of the terrain surface, care was taken to ensure that the photographs were taken by maintaining a partial overlap between adjacent photos. The areas had to be illuminated by external light sources, since only a small amount of daylight was available in the entrance area of the cave. The interior of the cave, where many of the local areas studied were located, was in total darkness.
The illumination of the cave wall and the photography itself were done in parallel, both in time and in the photography process itself, so that the light source and the camera lens had approximately the same orientation to the wall. In this way, shadowing of the cave wall, which can negatively affect the final result, was minimized. Through this methodology, three areas inside the cave with a total size of approx. 892.4 m2 were photographed. The first wall area was located in the cave entrance area (near the entrance area), and the second area corresponded to a cave wall in the breakdown room. The third area was a combination of two opposite cave walls and the cave ceiling located above them so that the cave in this part was recorded and analyzed as a cave arc. The data sets from the SFM procedure were in unfiltered condition.
By ultraviolet radiation, it is possible to induce the emission of visible light (fluorescence) or afterglow with visible light (luminescence) on objects (Buschbeck 1974). The effect on certain substances and organisms varies greatly and depends, among other things, on the light spectrum of the illuminant (Buschbeck 1974). This methodology makes it possible to visually detect the presence of certain microorganisms that are not visible to the human eye. For future studies, it should be checked during data acquisition whether photogrammetric processing of areas illuminated with UV light is possible in principle.
A wall area of about 10 m2 in Maelstrom Cave was recorded using UV light, comparable to the CRP process previously described. Since intensive illumination with UV light can lead to the destruction of some microorganisms (Aisha and Maznah 2018; Snider et al. 2009), the area was chosen accordingly so that a destructive effect of microorganisms could be excluded as far as possible.
Combining data
The photogrammetry and TLS data were aligned using GCP. As described in “Terrestrial laser scanning for 3D measurements,” a total of four GCP were placed on the site surface in the area of the entrance, which were identifiable on both the aerial photos and the point clouds from the TLS and were placed at the same position in each data set.
The photogrammetric reconstruction is used for the mathematical calculation of geometric quantities from photograph images, while in TLS, distance measurement is done directly. Due to the mathematical calculation in the photogrammetric calculation process, scaling effects can occur in the calculated 3D model. This effect could also be observed in the context of these investigations. For this reason, the referencing of the photogrammetric measurement data was performed using the local coordinates of the GCP of the TLS.
In the same way, the referencing of the close-range photogrammetry data was performed. At least three GCP were placed in each of the local areas of interest during the photography process and TLS, which were used for referencing in a manner analogous to aerial photogrammetry.
Comparing measurement accuracy between TLS and SFM
The primary objective of the photogrammetric survey inside the cave was to visualize the microbiology present on the rock surfaces and to complement the datasets from the TLS with the corresponding information. By locating the data sets in a matching coordinate system, it was additionally possible to determine the geometric correspondence of the different measurement methods. For the three cave sections mentioned in “Close-range photogrammetry,” which were reconstructed three-dimensionally by both the SFM method and TLS, a distance comparison between the measurement points of the different data sets was performed.
A cloud-to-cloud distance determination was applied using the open-source software solution CloudCompare (CC). By default, this calculation takes place with the nearest neighbor method, which determines the closest point of the reference point cloud for each point of the compared point cloud (Girardeau-Montaut 2015). This may result in small deviations from the actual (orthogonal) distance to the comparison data set (Fig. 3).

Difference between nearest neighbor distance and “true distance” in distance determination with CC (Girardeau-Montaut 2021)
While this method provides plausible results when comparing point clouds with high point density and low point spacing, it may result in an overestimation of the distance when comparing point clouds with low point density and high point spacing. In this case, local modeling of the surface can lead to an improvement in the calculation results. For highly curved surfaces, the quadric height function provides good modeling results (Girardeau-Montaut 2015), so this function was applied when comparing the TLS and SFM datasets.
In addition to the distance comparison of the three cave sections, CC was used to calculate the Gaussian distribution and the mean value of the respective distance calculation results. Since the distance comparison was performed using the unfiltered datasets from the SFM procedure, the presence of erroneous measurements in the photogrammetric datasets is likely. For this purpose, a d95 value was determined for each distance comparison. This value corresponds to the distance that 95% of all measurement points in the data comparison fall below, thus filtering the 5% of the most deviating points and thereby removing corresponding erroneous values as far as possible.
Processing 3D point data
The analysis of cave geometry was performed by using the combined data from aerial photogrammetry and TLS. By conventional measurement methods, the dimensions of cave cross-sections are usually determined by only a few measurements (height, width, slope, azimuth) (Collon et al. 2017; Gallay et al. 2016; Pardo-Iguzquiza et al. 2011). Due to the irregularity of cave cross-sections, it is difficult to describe the geometry of the cave system by only a few measured variables. Through TLS, extensive measurement data are available for this purpose, from which corresponding quantities can be derived. In the following, different processes are described in which several cross-sections of the cave system were generated, analyzed, and simplified in order to be able to represent the geometric course of the cave system in terms of height, width, slope (ground and ceiling), height above the ceiling, and distance to the cave entrance.
The following investigations are limited to the main part of the cave system. The geometry of the side arms and branches was not considered for the time being in the context of these investigations.
CC was used for the most part to process the measurement data; if not otherwise specified, the following procedures refer to processing with this software.
Generating cross-sections
To investigate the geometry analysis possibilities in the Maelstrom Cave system, the point cloud was edited so that the braided structure was simplified to a single thread stream.
A polyline (PL1) was used to approximate the course of the main cave strand. PL1 was divided into segments with lengths of 5.00 m, creating 64 connection points along this line. At each of these points, another polyline was generated orthogonally, which represented the location of the cross-section to be investigated and on the basis of which segmentation of the cave geometry took place. In this way, a total of 64 cross-section profiles were generated along the main Maelstrom Cave line. Figure 4 shows the orthogonal view of the point cloud with the identification of the described processing steps.

Point cloud from TLS of the studied Maelstrom Cave system with color height labeling of the main line (coloring corresponds to the relative height reference in the z-axis; red color = high z-value, blue color = low z-value; the transition between them is approximately linear), the side branches and connections filtered from the data set (black), as well as the polyline (PL1), which approximately represents the cave course, and the positions of the cross-section profiles (CS, black lines)
In order to correlate the geometric attributes of the Maelstrom Cave with climatological or microbiological approaches, the geometry of the individual cross-sectional profiles was analyzed. The irregularity of these profiles made it difficult to define quantities such as cross-section width and height. Conventional mapping methods usually involve only four distance measurements at local station points to determine size relationships (Collon et al. 2017; Jouves et al. 2017; Pardo-Iguzquiza et al. 2011). Measuring a large number of additional points to more accurately map the cave geometry is very time consuming in this process. Figure 5 shows an example of the conventional height and width determination for an irregular cave cross-section and the quantities that can be derived from it.

Determination of the vertical (DV) and horizontal (HV) dimensions of a cave cross-section i using the distances d1–4, starting from a viewpoint S. By determining these quantities, the actual shape of the cave cross-section (left) can be approximated only in the form of an ellipse (right) (modified from Pardo-Iguzquiza et al. (2011))
Transformation of the irregular cave cross-sections into representative ellipse shapes
Through the TLS, more extensive data sets were available, which described the cave passage spatially and in detail. The aim of these investigations was to use these complex data sets to transform the cross-sections into ellipses, which represent the cave geometry in a more suitable way and thus allow the relevant geometric quantities to be derived. For this purpose, the extracted cross-section profiles were simplified and mathematically described by appropriate functions.
At the beginning of this process, CC was used to determine the coordinates of the cross-section center, its spatial orientation (normal vector and its x/y/z components), and the area \({\mathrm{A}}_{\mathrm{Ellipse},\mathrm{i}}\) of each cross-section profile i. Based on the normal vectors and starting from the center point, the cross-sections were rotated by a corresponding angle \(\mathrm{\varphi }\) with
to locate the profiles exclusively in the xz-plane. In this way, the subsequent observation could be made in the two-dimensional plane. To further simplify the ellipse determination, the cross-section profiles were shifted by a vector \(\underset{\mathrm{v}}{\to }\) in such a way that the center point was defined by the coordinate origin (x = 0, y = 0, and z = 0).
Using the coordinates of each cross-section point, the maximum and minimum x and z values were determined. These values were used to determine the maximum section height \({\mathrm{h}}_{\mathrm{max}}\) and section width \({\mathrm{w}}_{\mathrm{max}}\) of each section i with
In a coordinate system described by x and y coordinates, an ellipse is basically defined by the equation
(Barth 2010; Papula 2014), where a and b represent the semi-axes of the ellipse. The area within an ellipse can be calculated using the formula:
In the case of a cave cross-section idealized as an ellipse, the equations
applied. The shape of the extracted CS was naturally irregular and could not be described directly by a function in this form. The approximation with a corresponding function was made in the first approach based on the limit values from the maximum cross-section height and width as well as the previously determined cross-section area. Two different ellipse functions were determined per CS. In the first variant (var. \({\mathrm{h}}_{\mathrm{max},\mathrm{i}}\)), for each cross-section profile, the variable \({\mathrm{b}}_{\mathrm{i}}\) based on \({\mathrm{h}}_{\mathrm{max},\mathrm{i}}\) and \({\mathrm{A}}_{\mathrm{Ellipse}}\) was determined with Eq. (5) and by considering Eq. (6). In the second variant (var. \({\mathrm{w}}_{\mathrm{max},\mathrm{i}}\)), \({\mathrm{a}}_{\mathrm{i}}\) was determined based on \({\mathrm{w}}_{\mathrm{max},\mathrm{i}}\) and \({\mathrm{A}}_{\mathrm{Ellipse}}\). Thus, two different calculation variants were performed, each considering two different measured variables from TLS to determine a third calculated variable. \({\mathrm{A}}_{\mathrm{Ellipse}}\) was chosen as a constant factor to approximate a function and is used in both approaches.
With respect to the local coordinate system developed by TLS (height along the z-axis) and since by transformation of the CS, every point of a profile possessed the y-coordinate 0, Eq. (4) was modified to
Using this formula, the ellipses, which were approximated to the CS, were spatially described in the local coordinate system. Figure 6 sketches the superposition of a cross-section profile with an ellipse centered at the coordinate origin.

two-dimensional representation of a CS (solid line) and the ellipse function (dashed line), which were aligned at the origin of the local coordinate system
The z-coordinate for different points along the ellipse circumference for different x-coordinates in the boundary region D was obtained by transforming Eq. (8) to
Since the center of each ellipse was at the coordinate origin due to the previous transformation, it could be assumed that the ellipses intersected the x-axis at x = + / − b and the z-axis at z = + / − a. The boundary values for Eq. (9) resulted in
By superimposing each CS with the corresponding two ellipses, it was possible to calculate the degree of partial coverage. The profiles, which existed previously only in the form of a polyline, were transformed to a closed surface. The surfaces were sampled into 104 individual points each. For each of these points, the relative position to the ellipse was determined using Eq. (8) with the corresponding x and z coordinates of a point and variables a and b of the ellipse calculated to a value > 1, the corresponding point was located outside the ellipse and there was no overlap for this point. If the term was calculated to a value \(\le 1\), the point was located on the ellipse boundary or inside the function. Thus, a covering was given.
This method was used to check how many of the 104 points were located within the ellipse boundary. This allowed the partial overlap to be determined as a percentage. Sensitivity analyses of this methodology were performed on different examples with 105 points, with the result that there were only marginal changes in the percentage determination. For this reason, as well as to reduce the size of the data, the analysis was limited to 104 points at a time.
In an iterative process, the ellipses were then shifted by different amounts \(\Delta \mathrm{x}\) and \(\Delta \mathrm{z}\) to obtain even greater overlap with the original cross-sections. This process allowed the overlap to be further optimized. Figure 7 shows the partial overlap for two cross-section profiles as an example.

Partial overlap of two CS (high overlap left, low overlap right) of the Maelstrom Cave
The partial overlap was used to identify which of the two ellipse variants (var. \({\mathrm{h}}_{\mathrm{max},\mathrm{i}}\) or \({\mathrm{w}}_{\mathrm{max},\mathrm{i}}\)) best reproduced the cross-section geometry. The subsequent investigations were limited to the consideration of the variant which had the higher percentage overlap after the iterative approximation.
By transformation by vector − \(\underset{\mathrm{v}}{\to }\) as well as by reverse transformation according to Eq. (1) with.
the ellipses could be finally aligned with the origin of the CS generated with CC.
Determination of representative geometric cross-sectional sizes on the basis of the ellipses
As a result of the processes described above, the cross-sections were simplified in such a way that, as a consequence, various geometric properties of the cave could be determined. Based on the ellipses, the quantities height h, width w, the ratio w/h, slope of the ground and ceiling, and height above ceiling were determined.
The total width w of the ellipses corresponded to twice the value a, the total height h to twice the value b. The ratio between the width and height of the cave cross-sections was determined by relating these two quantities (w/h ratio). The slope between two successive ellipses was determined for both the cave ceiling and ground. The determination was done by comparing the height difference \(\Delta \mathrm{z}\) of the vertices S3 (cave ceiling) and S4 (cave floor) (see Fig. 6) of two ellipses with the direct distance to each other. With
the slope was calculated.
Results
SFM and TLS
The positions of the GCP in the entrance area, which were used to combine the SFM data of the ground surface with the TLS data of the cave, are concretized in Fig. 8, together with the 3D point cloud and the extent of the photogrammetrically acquired area. In addition, the location of the Maelstrom Cave was visualized in black in relation to the terrain surface using the TLS data. An example of the three-dimensional reconstruction of a section of the cave in the breakdown room as a textured surface is also shown in Fig. 8.

Middle: 3D point cloud of the terrain surface above Maelstrom Cave derived from aerial photogrammetry with cave location labeling (TLS, black) and marking of the formations mentioned in point 2; upper left corner: a textured mesh of the cave wall in the breakdown room area as a result of the SFM process; upper right corner: photographs taken in the entrance area of Maelstrom Cave with the positions of the four GCP marked
The photographic images of the wall area with UV lighting could be photogrammetrically processed into a 3D point cloud. Based on the photographs, a texture was generated, which was overlaid with the 3D information. Figure 9 shows the textured 3D point cloud.

Photographs taken inside the cave using ultraviolet light to visualize organisms not visible to the human eye (upper image) and a textured point cloud from the SFM process (lower image)
By combining the different measurements and recording methods (SFM with conventional lighting and TLS), an overall 3D model was thus generated that depicted the terrain surface, the cave geometry, and the wall texture in local areas inside the cave, and through which different geometric quantities could be derived.
Figure 10 shows the combination of the close-range photogrammetry (colored) with the TLS (gray) inside the cave in the breakdown room area.

Data set of the cave interior resulting from TLS and CRP in the area of the breakdown room. The points with real coloration result from the CRP process and represent (viewing direction when descending into the cave) the right cave wall; the gray-colored points result from TLS. The vertical white lines represent roots of surface plants that have penetrated the interior of Maelstrom Cave from the ground surface and were recorded during TLS
Distance measurement between TLS and SFM
The calculated values of the three distance measurements are listed in Table 1.
In the near entrance area, the mean distance deviation between TLS and SFM was 0.140 m and the d95 value was 0.463 m, the highest value compared to the other distance measurements. It was visible that the deviations in the area of the three recorded GCP ranged between approximately 0.00 m and 0.10 m. With increasing distance from this area, especially toward the right wall area and the edges of the point cloud, deviations of > > 0.10 m were present.
Between the breakdown room datasets, the mean deviation was 0.044 m and the d95 value was 0.204 m. In the central part of the cave wall, the differences were mostly < 0.05 m and rarely reached values between 0.05 m and 0.10 m. Toward the edges of the point cloud, the differences increased up to a value of about 0.5 m. Isolated data points with differences > 0.50 m were recognizable.
The analysis of the cave arc shows a mean deviation of 0.019 m and a d95 value of 0.069 m. Thus, the highest agreement between the different recording methods was achieved in this comparison. It was recognizable that the cave ceiling information was incorporated into the total point cloud with acceptable accuracy (deviations mostly < 0.05 m), although no GCP were placed directly on the cave ceiling.
Geometric properties derived from the ellipses
In Fig. 11 in “Processing 3D point data,” described quantities are visualized. For orientation, the cumulative height difference of the cave floor (minimum values of the ellipses) was shown using a secondary ordinate. To determine the cumulative height difference, the peak value S4 of the ellipse located immediately at the cave entrance (distance x = 0 m) was defined to be z = 0 m. By summing the height differences between subsequent ellipses, the slope of the cave floor was qualitatively represented in two dimensions. In addition, the significant structures in the cave course described in “Maelstrom Cave system” were marked in the visualization.

Height above ceiling (top left), area of ellipses/cross-sections (top right), slope of cave ceiling (middle left), slope of cave floor (middle right), overlap of cross-sections with mathematically determined ellipses (bottom left), and width/height ratio (bottom right) of the determined ellipses with marking of the cave course as cumulative height difference of individual floor points and marking of significant points in the area of the breakdown room and blue-green stalactite
The described quantification and visualization of the cave geometry makes it possible to correlate the presence of certain microbiological life forms with the geometric conditions. This will allow to compare the localization of identical microbiological life forms throughout the cave system and to identify favorable geometric characteristics by matching them with the graphical specifications (Fig. 7). In this consideration, however, climatological parameters such as airflow velocities, air humidity, or precipitation water (running water on the walls) are not taken into account at the present stage yet.
Discussion
The results in Fig. 9 show that the ultraviolet light was emitted differently in local areas, possibly allowing the presence of certain microorganisms to be deduced. However, due to a lack of data to validate these different stainings, this issue could not be further substantiated in the context of these investigations. Also, due to the lack of reference points, referencing using the laser scan data and thus validation of the geometric quantities could not take place. However, the potential for using ultraviolet light in conjunction with photogrammetric processes became apparent during these investigations, which is why this topic will be addressed in further research projects.
The distance determination showed that by implementing the ceiling information into the photogrammetric calculation process, the marginal areas, which were present in the cave ceiling area in the previous two examples and where high differences to the TLS data were present, were neutralized. Equally high differences were present at the remaining edges of the total point cloud.
The high differences at the near entrance area likely resulted due to the small number of GCP used for stationing. In particular, the increase in differences with increasing distance to the GCP supports this hypothesis. In addition, all three GCP were positioned at approximately the same height. When arranging the markers, the pronounced distribution in all three spatial dimensions basically leads to better calculation and alignment results. Therefore, the small extent in elevation may have led to the relatively poor calculation result.
The cave wall in the breakdown room, on the other hand, was recorded and referenced using ten GCP, and care was also taken to arrange the markers at different heights. The result was a high agreement between the data sets. Similar to the near entrance area, however, high deviations toward the edge of the point cloud were evident.
The greatest agreement was obtained for the distance determination of the cave arc. The eight GCP used were placed with higher spatial extent than in the previously performed distance comparisons, resulting in an acceptable calculation result.
Consequently, the geometry inside the cave could be partially mapped photogrammetrically with good comparability to the geometry from the TLS. A prerequisite for this was the use of a correspondingly high number of GCP of > > 3, which represented the minimum number for stationing and alignment, as well as a pronounced distribution of the GCP in all three spatial directions.
However, it remains to be mentioned that in the present investigations, the geometry reconstruction inside the cave using the SFM method could not be done without the coupling to the TLS data. The point clouds, without taking into account the GCP and the local coordinates of the TLS, were scaled many times in the SFM process, which also overestimated the dimensions of the point clouds by many times. Only by considering the local reference frame of the TLS was a matching scaling of the total point cloud achieved.
Average overlap between the simplified ellipses and the cross-section of 87.77% could be achieved for the 64 cross-section profiles by the described methodology, from which a good conversion of the irregular structures of the cave geometry into simplified ellipse functions could be derived. However, large deviations occurred in the area of the breakdown room, where the cross-section profiles of the cave deviated significantly from the usual structure. In such areas, a separate or supplementary examination must take place in future investigations in order to be able to obtain a more suitable conversion of the structure for geometric analysis.
Conclusion
A significant part of the Maelstrom Cave on the Big Island, Hawaii, could be recorded three-dimensionally by combined imaging with TLS and SFM. The distance measurements inside the cave by TLS could be combined into a 3D model that depicted the cave geometry. By combining this dataset with a 3D model of the terrain surface generated by the SFM method, the overall point cloud was used to concretize the location of the cave in relation to the terrain surface.
The photogrammetrically generated datasets inside the cave were taken to visualize microbiological substances on the wall surfaces. For this purpose, GCP were positioned in specific areas, which were used in postprocessing for stationing based on the TLS data. Subsequently, these areas were illuminated with external light sources and photographed with an SLR camera. Three-dimensional point clouds were calculated based on the photographic images using the SFM method. Without considering the GCP and the local reference system from the TLS, the point clouds from the SFM procedure were highly scaled so that the calculated point clouds had significantly larger dimensions than the corresponding data from the TLS. After stationing the data using the local coordinate system, the corresponding areas could be supplemented by the photogrammetrically generated point clouds, and the color information from the photogrammetric images could thus be integrated into the overall model.
The areas recorded with UV illumination could be photogrammetrically reconstructed into three-dimensional data sets. Due to the lack of referencing by the TLS data as well as missing images by means of conventional illumination, an assignment of the microbiology to the different light emitters could not take place.
In addition to the supplementary use of the SFM data within the cave, a comparison could be performed between the geometric mapping from the SFM method (unfiltered) and the TLS by calculating the distances between the datasets. For this purpose, distance determination was performed using CC software with local modeling (quadric) of the reference point cloud.
It was found that the number and the location of the GCP used had a strong influence on the calculation results. For one wall section, which was stationed with only three GCP with a small spatial extent, a mean deviation of 0.140 m was calculated. For another wall section, which was stationed with ten GCP with larger spatial distribution, the mean deviation equaled 0.044 m. In both areas, significant differences were found at the boundaries of the point clouds with values mainly > 0.5 m compared to the TLS data.
The third comparison area represented a cave arc consisting of two opposing wall areas and the cave ceiling in between. Although no GCP were placed in the cave ceiling area during imaging, the best comparability of the three-dimensional geometries of the two data sets was achieved with a mean deviation of 0.019 m between TLS and SFM. By connecting the wall areas with images of the cave ceiling, the edge areas of the point cloud in this area could be eliminated. At the remaining edge areas, the differences were > 0.5 m.
Taking into account a suitable number and distribution of GCP, it was, therefore, possible, in addition to the optical properties, to reproduce the geometry inside the cave in a suitable way by the SFM method.
Using the combined overall model of the cave, different geometric properties of the cave could be analyzed and visualized. For this purpose, the total point cloud of the cave was divided into a total of 64 cross-sections, each of which was replicated and simplified by mathematical ellipse functions. To evaluate the quality of the mathematical replication, the overlap with the corresponding simplified ellipse shape was determined for each of the extracted cross-sections, which averaged 87.77%.
The ellipses were used to determine the height, width, height/width ratio, area, height above the ceiling, and slope (ground and ceiling). These parameters were determined to provide a meaningful reflection of the geometric characteristics of the cave. They will be will be correlated with microbiological and climatological data sets in the further course of the research in order to be able to answer corresponding questions and to verify the hypotheses made in point 1.
Future prospect
In further studies, the findings of the investigations, especially in relation to the determined geometrical aspects of the Maelstrom Cave, shall be correlated with climatological and microbiological approaches and data sets. The correlation with these data sets should provide information about the occurrence of the varying microbial communities inside the Maelstrom Cave and answer questions that cannot be solved by conventional investigation methods. In this course, the applicability of the geometric parameters determined by the ellipse functions and the limitations of this methodology, especially with respect to the data sets with a small overlap between the actual cave structure and the simplified ellipse, need to be further investigated. To complete the geometric evaluation, it is also necessary to investigate the influence of side passages and branches of the braided structure.
Based on the research results shown, future research projects will use extensive data acquisition to record airflow inside the cave over long periods of time. These data will be used to calibrate three-dimensional numerical simulations, which will be performed using the 3D model of the cave from the previous research. In this way, the model will be continuously updated and extended. By surveying additional lava caves on the Big Island, Hawaii, the applicability of the investigations presented here to different cave types will be determined.
Data availability
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
Code availability
Not applicable.
References
Aisha MA, Maznah WO (2018) Effect of ultraviolet radiation on the growth of microorganisms developing on cave wall paintings. In: 1st International conference on radiations and applications (ICRA-2017). Algiers, Algeria, 20–23 November 2017: Author(s) (AIP Conference Proceedings), p 70006. https://doi.org/10.1063/1.5048178
Baltsavias EP (1999) A comparison between photogrammetry and laser scanning. ISPRS J Photogramm Remote Sens 54:83–94. https://doi.org/10.1016/S0924-2716(99)00014-3
Barth F (2010) Mathematische Formeln und Definitionen, 8th edn. Bayer. Schulbuch-Verl.; Lindauer, München
Brown MV, Donachie SP, Bissett A, Foster J (2007) Deep evolutionary diversity in Hawaiian lava tube cyanobacterial microbial assemblage. Astrobiology 7:505
Buschbeck F (1974) Höhlen in Ultravioletten Licht. Die Höhle 25:63–66
Cave Conservancy of Hawai'i (2003) Kipuka Kanohina Cave preserve management plan
Collon P, Bernasconi D, Vuilleumier C, Renard P (2017) Statistical metrics for the characterization of karst network ge-ometry and topology. Geomorphology 283:122–142. https://doi.org/10.1016/j.geomorph.2017.01.034
de Waele J, Fabbri S, Santagata T, Chiarini V, Columbu A, Pisani L (2018) Geomorphological and speleogenetical obser-vations using terrestrial laser scanning and 3D photogrammetry in a gypsum cave (Emilia Romagna, N. Italy). Geo-Morphology 319:47–61. https://doi.org/10.1016/j.geomorph.2018.07.012
Egozi R, Ashmore P (2008) Defining and measuring braiding intensity. Earth Surf Process Landforms 33:2121–2138. https://doi.org/10.1002/esp.1658
El-Din Fawzy H (2019) 3D laser scanning and close-range photogrammetry for buildings documentation: a hybrid tech-nique towards a better accuracy. Alex Eng J 58:1191–1204. https://doi.org/10.1016/j.aej.2019.10.003
Engel AS, Jones D, Lavoie K, Barton HA, Ortiz-Ortiz M, Neilson JW, Legatzki A, Maier R, Tetu SG, Elbourne L (2015) Microbial Life of Cave Systems v.3. Walter de Gruyter GmbH & Co. KG, Berlin, Boston. https://doi.org/10.1515/9783110339888
Esmaeili S, Kruse S, Jazayeri S, Whelley P, Bell E, Richardson J, Garry WB, Young K (2020) Resolution of lava tubes with ground penetrating radar: the TubeX project. J Geophys Res Planets 125:e2019JE006138. https://doi.org/10.1029/2019JE006138
Gallay M, Kaňuk J, Hochmuth Z, Meneely J, Hofierka J, Sedlák V (2015) Large-scale and high-resolution 3-D cave map-ping by terrestrial laser scanning: a case study of the Domica Cave, Slovakia. IJS 44:277–291. https://doi.org/10.5038/1827-806X.44.3.6
Gallay M, Hochmuth Z, Kaňuk J, Hofierka J (2016) Geomorphometric analysis of cave ceiling channels mapped with 3-D terrestrial laser scanning. Hydrol Earth Syst Sci 20:1827–1849. https://doi.org/10.5194/hess-20-1827-2016
Girardeau-Montaut D (2015) CloudCompare – distances computation: version 2.10, GPL software. https://www.cloudcompare.org/doc/wiki/index.php?title=Distances_Computation. Accessed 21 April 2021
Girardeau-Montaut D (2021) CloudCompare: version 2.10, GPL software. http://www.cloudcompare.org/
Gleeson D, McDermott F, Clipson N (2007) Understanding microbially active biogeochemical environments. In: Advances in Applied Microbiology, vol 62. Academic Press, pp 81–104. https://doi.org/10.1016/S0065-2164(07)62004-8
Goldscheider N, Drew D (2007) Methods in karst hydrogeology. Taylor & Francis, Leiden, New York
Hathaway J, Garcia M, Balasch M, Spilde M, Stone FD, Dapkevicius MDLNE, Amorim IR, Gabriel R, Borges P, Northup D (2014) Comparison of Bacterial Diversity in Azorean and Hawai'ian Lava Cave Microbial Mats. Geomicrobiol J 31:205–220. https://doi.org/10.1080/01490451.2013.777491
Howard AD, Keetch ME, Vincent CL (1970) Topological and geometrical properties of braided streams. Water Resour Res 6:1674–1688. https://doi.org/10.1029/WR006i006p01674
Jouves J, Viseur S, Arfib B, Baudement C, Camus H, Collon P, Guglielmi Y (2017) Speleogenesis, geometry, and topology of caves: a quantitative study of 3D karst conduits. Geomorphology 298:86–106. https://doi.org/10.1016/j.geomorph.2017.09.019
Kereszturi G, Procter J, Cronin SJ, Németh K, Bebbington M, Lindsay J (2012) LiDAR-based quantification of lava flow susceptibility in the City of Auckland (New Zealand). Remote Sens Environ 125:198–213. https://doi.org/10.1016/j.rse.2012.07.015
Lee T (2018) An examination of close-range photogrammetry and traditional cave survey methods for terrestrial and underwater caves for 3-dimensional mapping. Master Thesis. https://spatial.usc.edu/wp-content/uploads/formidable/12/Trey-Olen-Lee.pdf
Marín-Buzón C, Pérez-Romero AM, León-Bonillo MJ, Martínez-Álvarez R, Mejías-García JC, Manzano-Agugliaro F (2021) Photogrammetry (SfM) vs. terrestrial laser scanning (TLS) for archaeological excavations: mosaic of Cantilla-na (Spain) as a case study. Appl Sci 11:11994. https://doi.org/10.3390/app112411994
Meydenbauer A (1867) Die Photometrographie: Wochenblatt des Architektenvereins zu Berlin Jg. 1, 1867, Nr. 14, S. 125–126; Nr. 15, S. 139–140; Nr. 16, S. 149–150. https://opus4.kobv.de/opus4-btu/files/784/db186749.pdf
Mulsow C, Mandlburger G, Ressl C, Maas H-G (2019) Vergleich von Bathymetriedaten aus luftgestützter Laserscanner- und Kameraerfassung. Dreiländertagung der DGPF, der OVG und der SGPF in Wien, Österreich. Publikationen der DGPF. https://www.dgpf.de/src/tagung/jt2019/proceedings/proceedings/papers/64_3LT2019_Mulsow_et_al.pdf
Northup DE, Melim LA, Spilde MN, Hathaway JJM, Garcia MG, Moya M, Stone FD, Boston PJ, Dapkevicius MLNE, Riquelme C (2011b) Lava cave microbial communities within mats and secondary mineral deposits: implications for life detection on other planets. Astrobiology 11:601–618. https://doi.org/10.1089/ast.2010.0562
Northup D, Spilde M, Hathaway J, Garcia M, Moya M, Stone F, Boston P, Dapkevicius M, Riquelme C (eds) (2011a) Lava cave microbial mat and secondary mineral deposit communities: implications for life detection on other planets
Papula L (2014) Mathematik für Ingenieure und Naturwissenschaftler: Ein Lehr- und Arbeitsbuch für das Grundstudium, 14th edn. Viewegs Fachbücher der Technik. Springer, Braunschweig
Pardo-Iguzquiza E, Durán-Valsero JJ, Rodríguez-Galiano V (2011) Morphometric analysis of three-dimensional networks of karst conduits. Geomorphology 132:17–28. https://doi.org/10.1016/j.geomorph.2011.04.030
Pflitsch A, Schörghofer N, Smith SM, Holmgren D (2016) Massive Ice Loss from the Mauna Loa Icecave, Hawaii. Arctic, Antarctic, and Alpine Res 48(1):S. 33–43. https://doi.org/10.1657/AAAR0014-095
Sawłowicz Z (2020) A short review of pyroducts (lava tubes). Ann Soc Geol Pol 90:513–534. https://doi.org/10.14241/asgp.2020.34
Snider J, Goin C, Miller R, Boston P, Northup D (2009) Ultraviolet radiation sensitivity in cave bacteria: evidence of ad-aptation to the subsurface? IJS 38:11–22. https://doi.org/10.5038/1827-806X.38.1.2
Spilde MN, Northup DE, Caimi NA, Boston PJ, Stone FD, Smith S (2016) Microbial mat Communities in Hawaiian lava caves. In: GSA Annual Meeting in Denver. Geological Society of America. https://doi.org/10.1130/abs/2016AM-283965
Talha A, Fritsch D (2019) Integration of laser scanning and photogrammetry in 3D4D cultural heritage: a review. IJAST 9:76–91. http://www.ijastnet.com/journals/Vol_9_No_4_December_2019/9.pdf
Triantafyllou A, Watlet A, Le Mouélic S, Camelbeeck T, Civet F, Kaufmann O, Quinif Y, Vandycke S (2019) 3-D digital outcrop model for analysis of brittle deformation and lithological mapping (Lorette cave, Belgium). J Struc-Tural Geol 120:55–66. https://doi.org/10.1016/j.jsg.2019.01.001
Weishampel J, Hightower J, Chase A, Chase D, Patrick R (2011) Detection and morphologic analysis of potential below-canopy cave openings in the karst landscape around the maya polity of caracol using airborne LIDAR. JCKS 73:187–196. https://doi.org/10.4311/2010EX0179R1
White W (2010) Secondary minerals in volcanic caves: data from Hawai’i. JCKS 72:75–85. https://doi.org/10.4311/jcks2009es0080
Wolfe E, Morris J (1996) Geologic map of the Island of Hawaii. IMAP. https://doi.org/10.3133/i2524A
Funding
Open Access funding enabled and organized by Projekt DEAL. The research was supported by the Nuremberg Institute of Technology Georg Simon Ohm as part of a teaching research project, which enabled the participating staff and students to travel to Big Island, Hawaii, for data acquisition of the 3D data. The financial support included full or partial coverage of the travel, food and accommodation costs of the participating individuals.
Author information
Authors and Affiliations
Contributions
All authors contributed to the study’s conception and design. Material preparation and data collection were performed by Michael Kögel, Andreas Pflitsch, Diana Northup, Thomas Killing, Michael Buschbacher, Helena Angerer, Julian Falkner, Achilieas Kynatidis, Valentin Ott, and Simon Regler. Data analysis was performed by Michael Kögel, Andreas Pflitsch, Diana Northup, Joey Medley, and Teresa Mansheim. The first draft of the manuscript was written by Michael Kögel, Andreas Pflitsch, Diana Northup, and Dirk Carstensen, and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
Not applicable.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Kögel, M., Pflitsch, A., Northup, D.E. et al. Combination of close-range and aerial photogrammetry with terrestrial laser scanning to answer microbiological and climatological questions in connection with lava caves. Appl Geomat 14, 679–694 (2022). https://doi.org/10.1007/s12518-022-00459-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12518-022-00459-7