
Abstract
We consider nonparametric prediction with multiple covariates, in particular categorical or functional predictors, or a mixture of both. The method proposed bases on an extension of the Nadaraya-Watson estimator where a kernel function is applied on a linear combination of distance measures each calculated on single covariates, with weights being estimated from the training data. The dependent variable can be categorical (binary or multi-class) or continuous, thus we consider both classification and regression problems. The methodology presented is illustrated and evaluated on artificial and real world data. Particularly it is observed that prediction accuracy can be increased, and irrelevant, noise variables can be identified/removed by ‘downgrading’ the corresponding distance measures in a completely data-driven way.
Similar content being viewed by others


1 Introduction
We consider nonparametric prediction and estimation with multiple categorical or functional predictors, or a mixture of both. Especially in the case of a categorical, multi-class response, the number of corresponding methods found in the literature is very limited.
The proposed method is an expansion of the well-known Nadaraya-Watson estimator
with some kernel \(K(\cdot )\) and bandwidth \(h_n\searrow 0\) (for \(n \rightarrow \infty \)), that was introduced by Nadaraya (1964) and Watson (1964) as a nonparametric estimator for the regression function in a model \(Y_i=f(X_i)+\varepsilon _i\) with continuous observations \((X_1,Y_1),\ldots ,(X_n,Y_n)\). In the classification case with categorical response Y this estimator can be adapted to estimate the posterior probability \(P_g(x)=P(Y=g|x)\) as
see for instance Hastie et al. (2009). We extend these estimators to handle multiple functional, categorical or mixed predictors, see Sect. 2. Besides estimation of the regression function we are interested in variable selection, thus in separating relevant predictors from noise variables. For this sake we determine some weights (counterpart to bandwidth) for each covariate in a data-driven way, see Sect. 2 for details. The size of the weights then indicates the relevance of the corresponding covariate. For a recent review on variable selection for regression models with functional covariates particularly see Aneiros et al. (2022).
Existing methods for nonparametric classification/regression and variable selection as covered by the method proposed in the paper at hand can be arranged in four macro-areas by the type of response (categorical/continuous) and predictor (functional/categorical). The case of a categorical response and functional predictors is handled, for instance, in Fuchs et al. (2015) who use an ensemble approach for classification of multiple functional covariates. They estimate the posterior probability separately for every covariate and weight the results to get an estimate of the overall posterior probability. Further they use several semi-metrics and combine the results in an analogous way. Thus their method can be used for feature as well as variable selection. A similar approach is followed by Gul et al. (2018) for categorical responses and categorical or continuous covariates. They use an ensemble of kNN classifiers based on random subsets of the covariates with the aim to select the most relevant covariates. The same type of response-covariate combination is considered by Mbina et al. (2019) who propose a procedure for classification in more than two groups with categorical (binary) and continuous predictors. Their aim is to select among the continuous variables those that are relevant for the classification. They use a criterion to quantify the loss of information resulting from selecting not all continuous variables and compare different procedures to estimate the criterion’s value. Continuous responses are considered e. g. in Shang (2014) and Racine et al. (2006). Shang (2014) considers a nonparametric regression model with a mixture of functional, categorical and continuous covariates. He uses a Bayesian approach to determine simultaneously the different bandwidths. His method can also be used for variable selection since the irrelevant variables are smoothed out by the appropriate bandwidth. Racine et al. (2006) test for significance of categorical predictors in regression models with categorical and continuous predictors. They use a product kernel to estimate the regression function and approximate the distribution of their test statistic under the null using a bootstrap procedure.

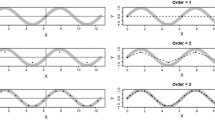
Illustration of the ArabicDigits in terms of a subset of the available signals for three Mel Frequency Cepstrum Coefficients, and digits ‘2’, ‘3’, ‘5’, and ‘7’; solid lines correspond to the respective mean curves
As an application example of the procedure proposed here, consider the following classification problem: the well-known ArabicDigits data set from the R-package mfds by Górecki and Smaga (2017), which contains time series of 13 Mel Frequency Cepstrum Coefficients (MFCCs) corresponding to spoken Arabic digits. MFCCs are very common for speech recognition, see Koolagudi et al. (2012) for a detailed explanation. Figure 1 shows a subset of the available signals for MFCC1, MFCC3 and MFCC10, and digits ‘2’, ‘3’, ‘5’, and ‘7’. In total, and more generally speaking, we are faced with a 10-class problem (digits \(0,1,\ldots ,9\)) and 13 functional predictors.
The rest of the paper is organized as follows. In Sect. 2, we begin with the regression case to explain the idea of our approach, and then put our focus on classification problems. Both cases are investigated through simulation studies in Sect. 3. The real data mentioned above and some further data, such as trajectory data from a psychological, virtual reality experiment, is revisited in Sect. 4, illustrating the presented method’s broad spectrum of potential applications. Section 5 concludes with a short discussion and outlook.
2 Methodology
Suppose there are training data \({{\mathbf {X}}}_i=(X_{i1},\ldots ,X_{ip})\), \(i=1,\ldots ,n\), with variables contained in \({{\mathbf {X}}}_i\) being continuous, categorical, functional, or a mixture of those. In addition, there is information \(Y_i\) on a scalar, dependent variable which may be continuous or categorical.
2.1 Regression
Let us first consider the regression problem with continuous \(Y_i\) and a single covariate \(X_i\), where
f being an unknown regression function, and \(\varepsilon _i\) some mean zero noise variable, potentially with some further assumptions such as independent identically distributed (iid) across subjects \(i = 1,\ldots ,n\).
For a new observation with known covariate value x, but unknown Y, a kernel-based, nonparametric prediction \(\hat{Y} = \hat{f}(x)\) is, e.g., given by
with some kernel \(K(\cdot )\), bandwidth \(h_n\searrow 0\) (for \(n \rightarrow \infty \)) and distance measure \(d(\cdot ,\cdot )\) that is appropriate for the type of predictor considered. In particular with functional data, \(d(\cdot ,\cdot )\) may also be calculated through so-called semi-metrics, compare Ferraty and Vieu (2006) and Sect. 2.3 below.
Now suppose for multiple (and potentially very different) predictors as given above, there are \(d_1(\cdot ,\cdot ),\ldots ,d_p(\cdot ,\cdot )\) available. With categorical predictors \(X_{il},x_l \in \{1,\ldots ,G_l\}\), for example, we may use
or for functional \(X_{ij},x_j \in L^2\), for instance,
where \(\mathcal {D}_j\) is the domain of the functions \(X_{ij},x_j\). In what follows, we will omit the \(\mathcal {D}_j\) for the sake of readability.
When predicting Y, multivariate predictor information \({{\mathbf {x}}}=(x_1,\ldots ,x_p)^\top \) should be considered jointly. A somewhat natural way to do so, appears to be
with positive weights \(\omega _1,\ldots ,\omega _p\) that should be estimated from the data. With \(\hat{Y}_{(-i)}\) being the leaving-one-out estimate
we may estimate \(\omega _1,\ldots ,\omega _p\) by minimizing
By \({\hat{\omega }}_1,\ldots ,{\hat{\omega }}_{{p}}\) we denote these minimizing weights.
The nonparametric estimator \({\hat{f}}\) defined in (3) is an extension of the well known Nadaraya-Watson estimator, see Sect. 1. Similar extensions of this kind of kernel estimator to the multivariate case are also well established; see, e.g., Härdle and Müller (2000) for some deeper insight. The typical form of a multivariate Nadaraya-Watson estimator for continuous covariates is
with bandwidths \((h_1,\ldots ,h_p)\), or
where \(\Vert \cdot \Vert \) is, e.g., the euclidean norm and \({{\mathbf {H}}}\) is a symmetric bandwidth matrix. If we set K in our \({\hat{f}}\) defined in (3) as an exponential function, e. g., the Picard kernel \(K(u)=e^{-u}I\{u\ge 0\}\), we have a very similar setting to \({\hat{f}}_{\text {NW}1}\) with \(|X-x|\) replaced by the more general d(X, x). Also, our \({\hat{f}}\) can be interpreted as a form of \({\hat{f}}_{\text {NW}2}\) with \(\Vert \cdot \Vert \) being some kind of \(L_1\)-norm (Manhattan-norm). Estimation of the weights (4) is similar to determining an optimal bandwidth for the Nadaraya-Watson estimator with cross-validation. There are different possibilities to choose the starting values for the numerical minimization of \(Q(\omega _1,\ldots ,\omega _p)\). In the simulation studies to follow in Sect. 3, for instance, we will use a rule of thumb for the bandwidth size for the regression case, whereas for the classification case (see Sect. 2.2 below) we determine a pre-estimator for each weight by considering p models each with only one predictor.
2.2 Classification
In the classification case, we also consider models that may contain functional and/or categorical predictors \(X_{ij}\) (\(i=1,\ldots ,n\), \(j=1,\ldots ,p\)), but categorical responses \(Y_i \in \{1,\ldots ,G\}\) for \(i=1,\ldots ,n\) instead of continuous ones. Especially the case \(p>1\), \(G>2\) is of interest since in this ‘multi\(^2\)fun’ case (multiple, possibly functional predictors and a multi-class response) there are only very few genuinely nonparametric methods available (compare Sect. 1).
Following the idea for the regression case, we estimate the posterior probability \(P_g({{\mathbf {x}}}):=P(Y=g|{{\mathbf {x}}})\) for a new set of predictor values \({{\mathbf {x}}}=(x_1,\ldots ,x_p)^\top \) with unknown class label Y by
with data-driven weights \(\omega _1,\ldots ,\omega _p\). As before we determine the weights by minimizing
where \({\hat{P}}_{g(-i)}\) is the leave-one-out estimator
Quantity (5) is also know as the Brier score or quadratic scoring rule, compare Gneiting and Raftery (2007), Brier (1950) and Selten (1998).
2.3 Distances and (semi-)metrics
A crucial question when dealing with functional predictors is the choice of the (semi)metric d, contrary to models with predictors that take values in \(\mathbb {R}^p\), since in a finite dimensional euclidean space all norms are equivalent. This concept fails for functional predictors since they take values in an infinite dimensional space. Even more, restricting d to be a metric is sometimes too restrictive in the functional case. That is why semi-metrics are considered such as
where u, v are functional predictors and \(u',v'\) their derivatives, see Ferraty and Vieu (2006) Chapter 3 for a deeper insight on this topic. An important difference between semi-metric (6), for instance, and a metric is that in the former case \(d(u,v) = 0\) will also be obtained if \(v(t) = u(t) + c\), for some constant \(c \ne 0\), i. e., if v is just a vertically shifted version of u. In general, the choice which (semi-)metric to take depends on the shape of the data and the goal of the statistical analysis. If, for example, the functional observations shall be displayed in a low-dimensional space, one possibility to do this is to use (functional) principal component analysis; compare, e.g., Ramsay and Silverman (2005) and Yao et al. (2005). In general, results can look very different, depending on the chosen measure of proximity. In Chapter 3 of Ferraty and Vieu (2006) examples to illustrate this effect are given. Also, further suggestions for semi-metrics and a survey which semi-metric may be appropriate for which situation can be found there. For example, semi-metric (6), which is based on the derivatives, is often well suited for smooth data whereas for rough data a different approach should be considered.
The (semi-)metric also plays an important role for the asymptotic properties of nonparametric functional estimators. Chapter 13 in Ferraty and Vieu (2006) is dedicated to this issue. The small ball probability that is defined as \(P(d(u,v)<\epsilon )\) appears in the rate of convergence of many nonparametric estimators such as the functional Nadaraya-Watson estimator. If the small ball probability decays very fast when \(\epsilon \) tends to zero (in other words, if the functional data are very dispersed) the rate of convergence will be poor, whereas a small ball probability decaying adequately slowly will lead to a rate of convergence similar to those found in finite dimensional settings.
In our simulation studies and for the real data examples we will use a form of the \(L^2\)-metric as already given in (2). This is a standard choice which works quite well for our examples. Note that, although our focus in this paper is not on the choice of the distance measure, our procedure could also be used to give a data driven answer on the question which (semi-)metric to choose. For this sake let us suppose there is only one functional predictor with observations \(X_1,\ldots ,X_n\) and a set of p potential (semi-)metrics \(d_1,\ldots ,d_p\). With this we set
and
respectively. Then, the estimated weights \({\hat{\omega }}_{1},\ldots ,{\hat{\omega }}_{{p}}\) tell us which distance measures are appropriate to explain the influence of the covariate on the response: those that are weighted highest. This approach is especially useful for feature selection since the (semi-)metrics can be chosen such that each \(d_j\) focuses on a certain feature of the curve, compare to Fuchs et al. (2015).
3 Numerical experiments
3.1 Regression problems
3.1.1 Set-up
To investigate the finite sample performance of our procedure, we generate data according to a model with mixed covariates (MixR), combining functional and categorical predictors. For \(i=1,\ldots ,n\), we generate functional covariates \(X_{i1},\ldots ,X_{ip_{\text {fun}}}\) according to
where \(B_{ij,l}\sim \mathcal {U}[0,5]\) and \(M_{ij,l}\sim \mathcal {U}[0,2\pi ]\) for \(l=1,\ldots ,5\), \(j=1,\ldots ,p_{\text {fun}}\), \(i=1,\ldots ,n\), and \(T=300\). \(\mathcal {U}\) stands for the (continuous) uniform distribution. Then, \(X_{ij}(t)\) is calculated from \({\tilde{X}}_{ij}(t)\) by scaling it in direction i and then dividing each value by 10. The categorical covariates are generated as \(X_{i(p_{\text {fun}}+1)},\ldots ,X_{i(p_{\text {fun}}+p_{\text {cat}})}\) \(\sim \)B(0.5), such that \(p_{\text {fun}}+p_{\text {cat}}=p\). With this we get an extended functional linear model
for some \(q_{\text {fun}}\le p_{\text {fun}}\) and \(q_{\text {cat}}\le p_{\text {cat}}\), where the coefficient function \(\gamma _{a,b}(t)=b^a/\Gamma (a)t^{a-1}e^{-bt}I\{t>0\}\) is the density of the Gamma distribution. See Ramsay and Silverman (2005) Chapter 15 or Kokoszka and Reimherr (2017) Chapter 4 for an introduction to functional linear models. The errors \(\varepsilon _i\) are iid standard normal. Further simulation examples (FunR, CatR) with solely functional or categorical covariates can be found in the online supplement.
We investigate ‘minimal’ and ‘sparse’ cases. Specifically, we compare the cases \(q_{\text {fun}}=q_{\text {cat}}=1\), \(p_{\text {fun}}=p_{\text {cat}}=2\) (minimal: (*.m)) and \(q_{\text {fun}}=q_{\text {cat}}=2\), \(p_{\text {fun}}=p_{\text {cat}}=8\) (sparse: (*.s)). For all generated data sets we use a one-sided Picard kernel \(K(u)=e^{-u}I\{u\ge 0\}\) and the results shown are based on 500 replications each.
To uncouple the estimation of the weights from the bandwidth that goes to zero as n grows, we set
with norming constants
and bandwidths \(h_n^\text {fun}=n^{-\frac{1}{p+4}}\) and \(h_n^\text {cat}=\frac{p+4}{\ln (n)}\), respectively. This choice of bandwidths coincides with the order of the optimal bandwidths in Racine and Li (2004) when K is the one sided Picard kernel and the categorical covariates are B(0.5)-distributed.
The prediction is then calculated as given in (3). For MixR, this means
where \(p_\text {fun}\) is the total number of functional covariates, \(p_\text {cat}\) the total number of categorical covariates and \(p=p_\text {fun}+p_\text {cat}\). The weights are estimated by minimizing \(Q(\omega _1,\ldots ,\omega _p) = \sum _{i=1}^n (Y_i - \hat{Y}_{(-i)})^2\), with \({\hat{Y}}_{(-i)}\) being the leave-one-out estimate as described above,
in case of MixR. For the minimization we make use of the R function optim (R Core Team (2020)) with starting value \((\omega _1,\ldots ,\omega _p)=(1,\ldots ,1)\), since in this context a brute force optimization routine suffices.
3.1.2 Results
The minimizing weights for the minimal as well as the sparse case and sample size \(n= 500\) are shown in Fig. 2. They are compared to the relative variable importance of a random forest, as a benchmark apart from kernel-based, nonparametric prediction. After applying a functional principal component analysis (R package refund by Scheipl et al. (2021)) on the functional observations we build a random forest using the R function randomForest (Liaw and Wiener (2002)). Further we compare our results to the method of Fuchs et al. (2015) (‘Ensemble’) which was described in Sect. 1. Although in their paper they only consider categorical responses, their method can also be applied in the regression case.
To increase comparability between the models we display normed weights \(\frac{{\hat{\omega }}_{{j}}}{\sum _{k=1}^p{\hat{\omega }}_{{k}}}\). This can also be interpreted as separating the estimation of the weights (normed weights) and optimization of the bandwidth (\(h_{\text {opt}}=\frac{h_n^{\text {fun/cat}}}{\sum _{k=1}^p{\hat{\omega }}_{{k}}}\)). It can be seen that the selection of relevant predictors works well, as the covariates with influence on the response get distinctly higher weights than those without. The sum over the weights for relevant covariates should be approximately one whereas the weights for irrelevant covariates should be close to zero. Both is visible for our procedure. The competing methods get comparable results where the random forest seems to have some difficulties identifying the functional noise and the ensemble approach with detecting the relevant categorical predictors.
For further comparison of our prediction results, we also compute the minimizer of Q under the restrictions
-
(i)
\(\omega _1=\omega _2=\ldots =\omega _p\),
-
(ii)
\(\omega _j=0\) for all covariates with no influence on the response.
Thus under restriction (ii), which we also call ‘oracle’, we determine the minimizing weights only for the relevant covariates, whereas restriction (i) leads to a single minimizing weight and can be interpreted as determination of a suitable overall/global bandwidth. Note, however, (ii) is only doable in simulations where the truth is known, and no option in practice. In Fig. 3 the squared estimation error of \({\hat{f}}\) is shown, where we display the average over 100 (minimal case) and 10000 (sparse case) \({{\mathbf {x}}}\)-values, respectively, and again compare our results to those of a random forest and the method of Fuchs et al. (2015). The \({{\mathbf {x}}}\)-values are generated randomly in the same way as the covariates. In each of the 500 replications, new \({{\mathbf {x}}}\)-values are generated. The explicit formula to calculate the squared estimation error for each replication is
where N is the number of \({{\mathbf {x}}}\)-values, f is the true regression function used to generate the data, \({{\mathbf {x}}}_1,\ldots ,{{\mathbf {x}}}_{N}\) are the x-values (generated at random) and \(\text {range}(f)=\max _{l}f({{\mathbf {x}}}_l)-\min _lf({{\mathbf {x}}}_l)\). The results for our procedure are comparable to those under restriction (ii) and better than those under restriction (i), as expected. The competing methods get worse prediction results. Especially compared to the random forest our method is superior. To get an insight in the influence of the \({{\mathbf {x}}}\)-values on the estimation error we ran the simulations also with \({{\mathbf {x}}}\)-values that are the same for each replication. The results are almost identical to those with varying \({{\mathbf {x}}}\)-values shown in Fig. 3. Only the variance of the estimation errors is slightly larger with varying \({{\mathbf {x}}}\)-values (as could be expected).
Another possible way to asses the performance of our procedure would be to look at the (test set) prediction error \(Y-{\hat{f}}({{\mathbf {x}}})=\varepsilon +f({{\mathbf {x}}})-{\hat{f}}({{\mathbf {x}}})\) instead of the estimation error as described above. The results would be similar since the errors \(\varepsilon \) are independent of the predictors and thus the mean squared prediction error and the mean squared estimation error only differ in the variance of \(\varepsilon \).

Normed minimizing weights \(\frac{{\hat{\omega }}_{{j}}}{\sum _{k=1}^p{\hat{\omega }}_{{k}}}\), variable importance of a random forest, and ensemble weights for model MixR in the minimal (left) and sparse (right) case, respectively

Estimation performance for model MixR in the minimal (left) and sparse (right) case with no restriction (‘data driven weights’), restriction (i, ‘equal weights’) and (ii, ‘oracle’), and with a random forest and the ensemble approach, respectively
3.2 Classification problems
3.2.1 Set-up
Similar to the regression case, we generate data according to a model (MixC) where we combine functional and categorical predictors. The functional observations are based on those built in model MixR, see Sect. 3.1. Let’s call them \(X_{ij}^{\text {(Fun)}}\). Then the functional observations for this classification model are \(X_{ij}(t)=X_{ij}^{\text {(Fun)}}(t)+0.3\cdot C_{ij}\) with \(C_{ij}\sim \mathcal {U}\{0,1\}\). Here \(\mathcal {U}\) stands for the discrete uniform distribution. The categorical covariates are \(X_{i(p_{\text {fun}}+1)},\) \(\ldots ,X_{i(p_{\text {fun}}+p_{\text {cat}})}\sim \)B(0.5), such that \(p_{\text {fun}}+p_{\text {cat}}=p\). With this,
\(q_{\text {fun}}\le p_{\text {fun}}\), \(q_{\text {cat}}\le p_{\text {cat}}\), and thus \(G=(q_{\text {fun}}+1)\cdot (q_{\text {cat}}+1)\).
As before we compare minimal (*.m) and sparse (*.s) cases, i. e., \(q_{\text {fun}}=q_{\text {cat}}=1\), \(p_{\text {fun}}=p_{\text {cat}}=2\) (*.m) and \(q_{\text {fun}}=q_{\text {cat}}=2\), \(p_{\text {fun}}=p_{\text {cat}}=8\) (*.s). The results are based on 500 replications. We use again the one-sided Picard kernel as described in Sect. 3.1. In contrast to the regression case, however, we use a pre-estimator for the weights instead of a starting value for the bandwidth. Thus, we set
with norming constants \(c_j^\text {fun}=\sqrt{\int \frac{1}{n-1}\sum _{l=1}^n(X_{lj}(t)-\frac{1}{n}\sum _{k=1}^nX_{kj}(t))^2dt}\), \(c_j^\text {cat}=\sqrt{\frac{1}{n-1}\sum _{l=1}^n(X_{lj}-\frac{1}{n}\sum _{k=1}^nX_{kj})^2}\), respectively, and determine the starting values \(({\hat{\omega }}_{1}^{\text {pre}},\ldots ,{\hat{\omega }}_{{p}}^{\text {pre}})\) for minimizing \(Q(\omega _1,\ldots ,\omega _p) = \sum _{i=1}^n\sum _{g=1}^G (I\{Y_i=g\} - \hat{P}_{g(-i)})^2\) by
with
where \(d_\text {fun/cat}\) means that \(d_\text {fun}\) or \(d_\text {cat}\) is used according to the type of the jth predictor. Of course it would have been possible to use the pre-estimator in the regression framework as well. Since in the regression case, however, there are well-known rules of thumb at hand for the bandwidth / weights selection, it may be preferable to use those to reduce computation time.
3.2.2 Results
As described in Sect. 3.1.2 we again compare our results to those of a random forest and the ensemble method of Fuchs et al. (2015). In Fig. 4 the minimizing normed weights for model MixC and \(n=500\) are displayed. The performance regarding the variable selection is very encouraging and for the functional covariates clearly better than that of the random forest.

Normed minimizing weights \(\frac{{\hat{\omega }}_{{j}}}{\sum _{k=1}^p{\hat{\omega }}_{{k}}}\), variable importance of a random forest, and ensemble weights for model MixC in the minimal (left) and sparse (right) case, respectively
The estimation performance of our procedure is shown in Fig. 5, where we display the squared error of \({\hat{P}}_g\) and compare it to the results under restriction (i) and (ii) as described in Sect. 3.1.2. Furthermore our approach is compared with the competing methods ‘Random Forest’ and ‘Ensemble’. For new \({{\mathbf {x}}}\)-values (that are generated in the same way as the observations from the training set), we predict the posterior probability with the random forest, the ensemble and with our \({\hat{P}}_g\) with the estimated weights, respectively. The data for the boxplots is calculated on test sets with \(N=100\) (minimal case) and \(N=1000\) (sparse case) as the Brier Score
where \(y({{\mathbf {x}}})\) is the response (class) resulting from the predictor \({{\mathbf {x}}}\). \(y({{\mathbf {x}}})\) are built in the same way as for the training observations. Similar to the regression case, the results achieved with new \({{\mathbf {x}}}\)-values for each replication and those with the same \({{\mathbf {x}}}\)-values in all replications are comparable. We display the results with varying \({{\mathbf {x}}}\)-values. It can be seen that the prediction works well and clearly better than the random forest and the ensemble method. Further in the sparse case, the results with data driven weights are much better than those with equal weights, which confirms the good variable selection/weighting performance.

Estimation performance for model MixC in the minimal (left) and sparse (right) case with no restriction (‘data driven weights’), restriction (i, ‘equal weights’) and (ii, ‘oracle’), and with a random forest and the ensemble approach, respectively
As additional information we display the missclassification rate as an arithmetic mean over
The results are summed up in Table 1. They confirm the good performance shown in Fig. 5, especially that our procedure works much better than the random forest and the ensemble approach. In particular, the superior performance of using weights within the kernel as proposed here instead of combining individual, covariate-specific nearest neighbor predictions as an ensemble can be explained as follows. Whereas the nonparametric, kernel-based approach as presented in Sect. 2 is able to handle/incorporate interactions between predictors, this is hardly possible by simply combining predictions each based on a single covariate only by means of a weighted average (as done with the ensemble). Furthermore, nearest neighbor predictions that use a single, binary predictor only, tend to be poor (which also affects the ensemble at least to some degree). As a result, the nearest neighbor ensemble approach may not be the way to go with categorical predictors that only have a small number of categories. The results for further models we simulated can be found in the online supplement.
4 Application to real world data
Finally, we apply our procedure to some real world data. The first one is the ArabicDigits data described in the Introduction. Further we consider trajectory data from a psychological experiment with virtual reality devices, as well as another three benchmark data sets. The first one is data from a medical survey investigating the response of patients to drug therapy. The second one is data from a psychological survey investigating the effect of different movies on the motivational state of participants. The third one is a well-known data set on the housing situation in Copenhagen.
4.1 Speech recognition
As an example for a multi-class classification problem with multiple functional predictors we consider the data set ArabicDigits from the R-package mfds by Górecki and Smaga (2017), see Sect. 1. Each time series in the 13 speech features contains 93 data points and the number of time series is 8800 (10 digits x 10 repetitions x 88 speakers) in total. We split the data in each group randomly in a training and a test set in the relation 70/30. Thus we estimate our weights based on \(n=6160\) observations with \(p=13\), \(G=10\) and \(T=93\).
The results show that all 13 MFCCs are relevant as expected. The 13 normed weights are all of the same size around 1/13, see Fig. 6. Further the prediction results for the test data set (2640 observations) are almost perfect as can be seen in Table 2. This very good prediction performance is comparable to results of other procedures applied on this data set. For instance, Górecki and Łuczak (2015) model the data as multivariate time series and use a 1NN classification where the distance measure is based on dynamic time warping. A (parametric) functional multivariate regression approach for multi-label classification is used by Krzyśko and Smaga (2017). In Möller and Gertheiss (2018) a classification tree is applied. The authors choose arbitrarily two out of the 10 digits to make the problem a binary classification task. They all get very good prediction results for this data set as well.

Estimated weights (normed) for the 13 MFCCs in the ArabicDigits data set
4.2 Virtual reality movement data

Examples for trajectories from one female individual. The orientational movement of the head (right chart) can be interpreted as follows: An increase in the x-component refers to looking to the right; a decrease to looking to the left. An increase in the y-component refers to looking up; a decrease to looking down. An increase in the z-component refers to tilting the head to the right; a decrease to tilting it to the left
Besides ‘classical’, one-dimensional functional data, also other types of functional data such as 3-dimensional trajectories are getting more and more attention; see, e.g., Fernández-Fontelo et al. (2021). The data set considered in the paper at hand contains 3-dimensional movement data of the hands and head of participants in a psychological experiment, compare Vogel et al. (2022). The participants were asked to perform guided upper body exercises like stretching their arms or embracing themselves. Furthermore, the participants were given a virtual reality headset and two joysticks, one for each hand. With these devices the movements of the hands and the head were recorded. The movements are recorded as ‘global’, ‘local’ and ‘orientational’, where ‘global’ describes the position in the lab, ‘local’ the position relative to the position of the feet and ‘orientational’ records rotational motions; see Vogel et al. (2022) for a more detailed description of the experimental setting, and Vahle and Tomasik (2021) for a similar experiment, with the focus being on memory performance, physical strength and endurance. Figure 7 shows some example trajectories. It is easy to identify from the left chart the time point when the participant is asked to raise her hands and to build the letter ‘T’ directly afterwards. The virtual reality that was created for the participants, was an avatar to mimic the movements. The participants were all young, while the avatars were either young or elderly people. One of the questions of this psychological experiment was whether the experimental condition, that is, the class of the avatar (young vs. elderly person) could be reconstructed from the movement data. Thus we have a binary classification problem with multiple 3-dimensional functional predictors (trajectories).
The task is to predict/identify the class of the avatar (young vs. elderly person) using the movement data. To allow for the multi-dimensional functional predictors (the trajectories), we set
where \(X^{(r)}(t)\) describes the r-th component of X(t) and

Estimated weights (normed) for the 9 predictors (3 body parts x 3 coordinate systems) in the VR data set. The first 3 weights belong to the head movements (global, local, orientational), the middle 3 weights to the left hand movements, and the last 3 weights to the right hand movements
In total there is data from \(n=72\) participants available and the movements are tracked with a frequency of 10 Hz, resulting in patterns consisting of \(T=4970\) time points per coordinate. The data is available at https://osf.io/h53rk/. We estimate the weights with all available observations. The results are shown in Fig. 8. It can be seen that the first two predictors (global and local position of the head) are weighted distinctly higher than the following 7 predictors. The reason for this effect, however, became clear after some closer inspection of the data as there is an artificial additive shift between groups for the local head data. Due to a coding error, the reference point for the local head data is different between groups. This shift is not apparent in the global head data and thus, since both components describe the same movements, their combination is a good predictor. Although this effect is only an artifact, we nevertheless present the results for the entire data set since they confirm the good performance of our procedure in terms of variable selection.
4.3 Impact of gene expressions on the responses to drug therapy
This real data example is considered due to its potential for variable selection. The data set contains gene expressions of \(p=76\) genes which are mainly related to the immune system from \(n=53\) multiple sclerosis patients that were treated with interferon beta (IFN-\(\beta \)). After an observation period of 2 years the patients were categorized into good and poor responders. Thus we deal with a binary classification problem with multiple functional predictors. The gene expression levels were measured at the beginning of the treatment and after 3, 6, 9, 12, 18, and 24 months. Since there are missing values the number of time points range from \(T=4\) to \(T=7\). In Baranzini et al. (2004) this data set is explained and examined elaborately including a longitudinal analysis of the genes responder effect using a repeated-measures analysis of variance. Kayano et al. (2016) take this data set as an application example for their method of differential analysis for time course gene expression profiles. They apply a functional logistic model to identify the genes with dynamic alterations in good/poor responders. The same data has also been analyzed by Hirose et al. (2007) who applied clustering algorithms.
We estimate the weights with all available observations (\(n=53\)) and afterwards predict the class for each observation in a leave-one-out manner with weights that are newly estimated with all but the one observation that shall be predicted. In Fig. 9 the estimated weights are shown and compared to the most significant genes for predicting the responder effect determined by Baranzini et al. (2004) and Kayano et al. (2016) respectively. In addition, in Table 3 the 20 genes weighted highest by our method are listed. It can be seen that 8 (resp. 6) of the 20 genes are also part of the 20 (resp. 15) most significant ones of Baranzini et al. (2004) (resp. Kayano et al. (2016)). Baranzini et al. (2004) and Kayano et al. (2016) match in 9 genes.

4.4 Effect of movies on motivational state
This data set is considered as an example for multi-class classification with categorical predictors. It is called msq and is included in the R-package psychTools by Revelle (2021). MSQ stands for motivational state questionnaire in which participants were asked to indicate their current standing on a four-point scale from 0 (‘not at all’) to 3 (‘very much’) for 72 emotions like ‘afraid’, ‘angry’, ‘cheerful’, ‘happy’, ‘relaxed’, etc. The whole data set contains data from 38 studies with different focuses. We were interested in the effect of different movies shown to the participants and thus used the data from the studies ‘FLAT’ and ‘Maps’. The movies shown were 9 minute clips from 1) a BBC documentary on British troops arriving at the Bergen-Belsen concentration camp, 2) a scene from the horror movie ‘Halloween’, 3) a documentary about lions on the Serengeti plain, and 4) a scene from the comedy ‘Parenthood’. Our aim was then to predict the movie a participant has seen based on his or her MSQ before and after seeing the clip. For this sake we built the differences between the ratings on the MSQ that was filled out after seeing the movie and the ratings on the MSQ from before the movie, and used these values as categorical predictors. Thus a value of e. g. \(-3\) means that this emotion was rated as 3 (‘very much’) before the movie and as 0 (‘not at all’) after the movie.
In total our weight estimation and prediction was based on \(n=188\) training observations with \(G=4\) and \(p=72\), where each of the 72 predictors is a categorical variable with values in \(\{-3,-2,-1,0,1,2,3\}\). Figure 10 shows the satisfying prediction results based on a 70/30 split in training and test data for our procedure and for a random forest in comparison.
Since the predictor-data is ordinal we also considered the distance measure
in addition to
which is similar to the distance measure introduced in (1). The norming constants are data dependent:
The weights displayed in Fig. 11 are the minimizing weights for a model with \(p=144\), where \(X_{i,73},\ldots ,X_{i,144}\) are copies of \(X_{i,1},\ldots ,X_{i,72}\) for all \(i=1,\ldots ,n\) and \(d_1\equiv \ldots \equiv d_{72}\equiv d_{\text {nom}}\) whereas \(d_{73}\equiv \ldots \equiv d_{144}\equiv d_{\text {ord}}\). It can be seen that the weights that correspond to \(d_{\text {ord}}\) (‘ordinal distance’) tend to be weighted higher than those that correspond to \(d_{\text {nom}}\) (‘nominal distance’), which confirms our expectations. Also a binomial test on the signs of the differences \((\omega _{j+72}-\omega _j)\) rejects the null that these differences have median zero with p-value 0.038. The prediction results shown in Fig. 10 are achieved with \(p=72\) and \(d_j\equiv d_{\text {ord}}\) for all j.

Prediction accuracy per class for the MSQ data set with our procedure (data driven weights) and with a random forest

Estimated weights for a combination of two copies of the MSQ data set with different distance measures, namely \(d_{\text {nom}}\) (‘nominal distance’) and \(d_{\text {ord}}\) (‘ordinal distance’). The bars indicate the differences between the weights that correspond to the ordinal and those that correspond to the nominal distance measure
4.5 Housing in copenhagen
As another example with categorical predictors we consider the Copenhagen housing data with a focus on variable selection. The data set is part of the R-package MASS by Venables and Ripley (2002). In the survey 1681 householders in Copenhagen where asked about their satisfaction with their present housing circumstances which could be high, medium or low. We handle this data as a classification problem with \(G=3\) and three categorical predictors, namely the influence householders have on the management of the property (high, medium or low), the type of rental accommodation (tower, atrium, apartment or terrace), and the contact residents have with other residents (low or high). Additionally, we simulate 6 further categorical covariates that are uniformly distributed on \(\{1,2\}\), \(\{1,2,3\}\) and \(\{1,2,3,4\}\) respectively. Thus our procedure should be able to identify the 3 true predictors in the 9 covariates. In Fig. 12 the estimated weights are displayed as boxplots over 500 independent repetitions (i.e., simulation of the additional, noise variables has been carried out 500 times). As distance measure we used the ordinal \(d_{\text {ord}}\) introduced in the previous example. It can be seen that the 3 true predictors get the highest weights, with the third one (‘contact’) seeming to have the lowest influence on the satisfaction of the householders.

Estimated weights (normed) for the Housing data set with 3 true predictors (\(\omega _1,\omega _2,\omega _3\)) and 6 additional noise variables (\(\omega _4,\ldots ,\omega _9\))
5 Concluding remarks
We proposed a nonparametric method for classification and regression estimation where the covariates may be functional, categorical, or a mixture of both. We allowed for multiple predictors as well as multi-class classification. A key property of our method is its ability of variable/feature weighting, which can also be used for selection purposes.
Although we focussed on functional and categorical predictors, our approach is also suitable for continuous, or continuous mixed with functional and/or categorical, covariates. Due to its universal structure our method works for all types of data that a distance measure can be applied on.
Additionally other loss functions can be considered instead of the Brier Score / the quadratic error. For example in medical applications it could be of interest to minimize false negative results, which is in general also possible with our procedure by adapting the loss function Q.
In our extensive simulation study and the application to real world data we showed the good performance of our procedure both in terms of variable weighting/selection as well as estimation and prediction. An interesting topic in addition could be a thorough theoretical analysis of the asymptotic properties similar to the considerations in Hall et al. (2007), who show for a model with continuous and categorical covariates that irrelevant predictors are smoothed out by an optimal bandwidths determination. However, this is beyond the scope of this paper and will be a topic for future research.
References
Aneiros G, Novo S, Vieu P (2022) Variable selection in functional regression models: A review. J of Multivariate Anal 188:104861
Baranzini SE, Mousavi P, Rio J, Caillier SJ, Stillman A, Villoslada P, Wyatt MM, Comabella M, Greller LD, Somogyi R, Montalban X, Oksenberg JR (2004) Transcription-based prediction of response to IFN\(\beta \) using supervised computational methods. PLoS Biol 3(1):e2
Brier GW (1950) Verification of forecasts expressed in terms of probability. Monthly Weather Rev 78(1):1–3
Fernández-Fontelo A, Henninger F, Kieslich PJ, Kreuter F, Greven S (2021) Predicting question difficulty in web surveys: A machine learning approach based on mouse movement features. Social Science Computer Review pp 1–22
Ferraty F, Vieu P (2006) Nonparametric Functional Data Analysis. Springer Series in Statistics, Springer, New York
Fuchs K, Gertheiss J, Tutz G (2015) Nearest neighbor ensembles for functional data with interpretable feature selection. Chemometrics and Intell Laboratory Syst 146:186–197
Gneiting T, Raftery AE (2007) Strictly proper scoring rules, prediction, and estimation. J of the Am Statistical Assoc 102(477):359–378
Goldsmith J, Scheipl F, Huang L, Wrobel J, Di C, Gellar J, Harezlak J, McLean MW, Swihart B, Xiao L, Crainiceanu C, Reiss PT (2021) refund: Regression with Functional Data. https://CRAN.R-project.org/package=refund, r package version 0.1-24
Górecki T, Łuczak M (2015) Multivariate time series classification with parametric derivative dynamic time warping. Expert Syst with Appl 42:2305–2312
Górecki T, Smaga Ł (2017) mfds: Multivariate Functional Data Sets. Adam Mickiewicz University, Poznan, https://github.com/Halmaris/mfds, r package version 0.1.0
Gul A, Perperoglou A, Khan Z, Mahmoud O, Miftahuddin M, Adler W, Lausen B (2018) Ensemble of a subset of kNN classifiers. Adv in Data Anal and Classif 12:827–840
Hall P, Li Q, Racine JS (2007) Nonparametric estimation of regression functions in the presence of irrelevant regressors. The Rev of Econ and Statistics 89(4):784–789
Härdle W, Müller M (2000) Multivariate and semiparametric kernel regression. In: Schimek MG (ed) Smoothing and Regression: Approaches, Computation, and Application. Wiley Series in Probability and Statistics, Wiley, New York (chap 12)
Hastie T, Tibshiranie R, Friedman J (2009) The Elements of Statistical Learning-Data Mining, Inference, and Prediction, 2nd edn. Springer Series in Statistics, Springer, New York
Hirose O, Yoshida R, Yamaguchi R, Imoto S, Higuchi T, Miyano S (2007) Clustering samples characterized by time course gene expression profiles using the mixture of state space models. Genome Inf 18:258–266
Kayano M, Matsui H, Yamaguchi R, Imoto S, Miyano S (2016) Gene set differential analysis of time course expression profiles via sparse estimation in functional logistic model with application to time-dependent biomarker detection. Biostat 17(2):235–248
Kokoszka P, Reimherr M (2017) Introduction to Functional Data Analysis. Texts in Statistical Science. CRC Press, New York
Koolagudi SG, Rastogi D, Rao KS (2012) Identification of language using mel-frequency cepstral coefficients (mfcc). In: Rajesh R, Ganesh K, Koh SCL (eds) Procedia Engineering 38: International Conference on Modelling, Optimisation and Computing (ICMOC). Elsevier, Amsterdam, pp 3391–3398
Krzyśko M, Smaga Ł (2017) An application of functional multivariate regression model to multiclass classification. Statistics in Trans New Ser 18(3):433–442
Liaw A, Wiener M (2002) Classification and regression by randomforest. R News 2(3):18–22. https://CRAN.R-project.org/doc/Rnews/
Mbina AM, Nkiet GM, Obiang FE (2019) Variable selection in discriminant analysis for mixed continuous-binary variables and several groups. Adv in Data Anal and Classif 13:773–795
Möller A, Gertheiss J (2018) A classification tree for functional data. In: Proceedings of the 33th International Workshop on Statistical Modelling. Statistical Modelling Society, pp 219–224
Nadaraya EA (1964) On non-parametric estimates of density functions and regression curves. Theory of Probab and its Appl 10:186–190
R Core Team (2020) R: A Language and Environment for Statistical Computing. R Foundation for Statistical Computing, Vienna, Austria. https://www.R-project.org/
Racine JS, Li Q (2004) Nonparametric estimation of regression functions with both categorical and continuous data. J of Econom 119:99–130
Racine JS, Hart JD, Li Q (2006) Testing the significance of categorical predictor variables in nonparametric regression models. Econom Theory 25:1–42
Ramsay J, Silverman B (2005) Functional Data Analysis. Springer Series in Statistics, Springer, New York
Revelle W (2021) psychTools:Tools to Accompany the ’psych; Package for Psychological Research. Northwestern University, Evanston, Illinois, https://CRAN.R-project.org/package=psychTools, r package version 2.1.6
Selten R (1998) Axiomatic characterization of the quadratic scoring rule. Exp Econom 1:43–62
Shang HL (2014) Bayesian bandwidth estimation for a functional nonparametric regression model with mixed types of regressors and unknown error density. J of Nonparametric Statistics 26(3):599–615
Vahle NM, Tomasik MJ (2021) Declines in memory and physical functioning when young adults experience being old in virtual reality. Preprint, Repository: OSF https://osf.io/h53rk/
Venables WN, Ripley BD (2002) Modern Applied Statistics with S, 4th edn. Springer, New York. http://www.stats.ox.ac.uk/pub/MASS4/, ISBN 0-387-95457-0
Vogel F, Vahle NM, Gertheiss J, Tomasik MJ (2022) Supervised learning for analysing movement patterns in a virtual reality experiment. Royal Soc Open Sci 9:211594
Watson GS (1964) Smooth regression analysis. Sankhya Ser A 26:359–372
Yao F, Müller HG, Wang JL (2005) Functional data analysis for sparse longitudinal data. J of the Am Statistical Assoc 100(470):577–590
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Statements and Declarations
There are no relevant financial or non-financial competing interests to report.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Selk, L., Gertheiss, J. Nonparametric regression and classification with functional, categorical, and mixed covariates. Adv Data Anal Classif 17, 519–543 (2023). https://doi.org/10.1007/s11634-022-00513-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11634-022-00513-7
Keywords
- Classification
- Nonparametric regression
- Multivariate functional predictors
- Multivariate categorical predictors
- Multi-class response
- Variable selection