
Abstract
We study kink and fluting waves in expanding and twisted magnetic flux tubes. We use the thin-tube and zero-beta plasma approximations. The equilibrium magnetic field is force free with a constant proportionality coefficient between the electrical current and the magnetic field. We derive the equation governing the kink and fluting waves in a tube. Using this equation we study the propagation of kink waves in a particular case of a magnetic tube homogeneous in the axial direction. We show that while there is only one propagating kink wave with the phase speed equal to the kink speed in an untwisted tube, in a twisted tube there are two wave modes, accelerated and decelerated. The phase speed of the accelerated wave exceeds the kink speed, while the phase speed of the decelerated wave is less than the kink speed. We also show that the standing modes are defined by the same eigenvalue problem as that in the case of an untwisted tube. Hence, the frequencies of the standing-wave modes are not affected by the twist. This implies that the seismological results based on the observation of the standing-wave mode frequencies remain valid when the twist is taken into account. The only effect of twist is the variation of the direction of polarisation of the coronal magnetic-loop displacement along the loop. As a result, an apparent node can be detected near the loop apex if only one component of the loop displacement is observed. This can lead to an incorrect conclusion that the observed coronal loop kink oscillation was the first overtone, while in fact it was the fundamental mode.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
It is generally accepted that the solar atmosphere is highly inhomogeneous and this inhomogeneity is intrinsically related to the magnetic field. One of the main blocks of the solar atmosphere structuring are coronal magnetic loops (see, e.g., the review by Reale, 2014). The footpoints are attached to the solar chromosphere. The coronal magnetic loops are elongated in the magnetic field direction. The characteristic size of a coronal loop cross section is a few Mm, and its length varies in a wide range and can be up to a few hundred Mm (e.g. Schrijver, 2007). The loops are also characterised by the enhanced plasma density. The ratio of these densities inside and outside of a loop can vary from a value only slightly higher than unity to more than one hundred (see, e.g., Aschwanden, Nakariakov, and Melnikov, 2004).
Coronal magnetic loops are highly dynamic. In particular, transverse oscillations of coronal loops are observed. The first observations of these oscillations were made by the Transition Region and Coronal Explorer (TRACE) spacecraft in 1998. They were reported by Aschwanden et al. (1999) and Nakariakov et al. (1999), and interpreted as kink oscillations of magnetic tubes. After this first observation kink oscillations of coronal magnetic loops have been routinely observed by space missions (e.g. Goddard et al., 2016; Abedini, 2018; Nechaeva et al., 2019).
The coronal loop kink oscillations observed by TRACE in 1998 were large-amplitude standing waves. Later, low-amplitude propagating waves were also detected with the Coronal Mulyi-Channel Polarimeters (CoMP). They have been observed propagating along coronal loops and plumes (Tomczyk et al., 2008; Morton, Weberg, and McLaughlin, 2019; Yang et al., 2020; Morton et al., 2021; Li et al., 2023). Propagating kink oscillations have been also observed in solar prominences (Okamoto et al., 2007).
The first application of the theory of magnetic tube kink waves to observations was based on early studies of waves in a magnetically structured atmosphere (e.g. Ryutov and Ryutova, 1976; Edwin and Roberts, 1983). In these studies, the simplest model of a coronal loop in the form of a straight homogeneous magnetic tube was used. Later, more complex models were adopted (for a review see Ruderman and Erdélyi, 2009; Nakariakov et al., 2021). One important property of magnetic waveguides is that both the plasma density and the cross-sectional radius vary along them. Dymova and Ruderman (2005) showed that kink waves in a straight magnetic tube are described by a wave equation with the variable phase velocity. Ruderman, Verth, and Erdélyi (2008) generalised this result and showed that even when not only the plasma density but also the cross-sectional radius varies along the magnetic tube the kink waves are still described by the wave equation.
Since the plasma \(\beta\) in the solar corona is very small, any equilibrium magnetic field in the solar corona must be approximately force free. The simplest force-free magnetic field is potential. The equilibria describing coronal magnetic loops that are based on using potential magnetic field predict sufficiently strong loop expansion. However, observations show that the loop expansion is quite weak with the ratio of the loop cross-sectional radius at the apex to that at the footpoints usually not exceeding two (Golub et al., 1990; Klimchuk et al., 1992; Klimchuk, 2000; Watko and Klimchuk, 2000; López Fuentes, Klimchuk, and Dómoulin, 2006; Brooks et al., 2007; Kucera et al., 2019; Li et al., 2020). One possible explanation of weak coronal loop expansion is that the coronal magnetic loops are twisted. Twisted magnetic flux tubes were first considered in relation to magnetohydrodynamic (MHD) stability (e.g. Dungey and Loughhead, 1954; Roberts, 1956; Shafranov, 1957; Kruskal and Tuck, 1958; Goedbloed, 1971; Parker, 1974; Browning and Priest, 1983). Later, twisted magnetic tubes were considered in connection with the MHD resonant absorption (e.g. Sakurai, Goossens, and Hollweg, 1991; Goossens, Ruderman, and Hollweg, 1995; Ballai and Erdélyi, 2002; Karami and Bahari, 2010; Bahari, 2018; Ebrahimi and Bahari, 2019).
To our knowledge, Bennett, Roberts, and Narain (1999) were the first who studied kink waves in twisted magnetic flux tubes. They used the approximation of incompressible plasmas and considered magnetic tubes homogeneous in the axial direction. Ruderman (2007) (Paper I below) studied the eigenmodes of kink oscillations in a twisted magnetic tube using the cold-plasma and thin-tube approximations. He took the plasma density variation along the tube into account. He also assumed that the twist is bounded to the tube interior, while there is no twist outside of the tube, and took the azimuthal magnetic field component proportional to the distance from the tube axis. It is worth noting that the equilibrium magnetic field is discontinuous at the tube boundary. One of the main results obtained in Paper I is that in this particular equilibrium the twist does not affect the oscillation frequency of kink waves. Later, a few authors studied kink waves in twisted magnetic flux tubes. Terradas and Goossens (2012) considered an equilibrium with the twist bounded to an annulus. They found that in such a tube the twist affected the oscillation frequency of the kink wave. Later, a few authors continued to study kink waves in twisted magnetic flux tubes. Ruderman (2015) studied propagating kink waves in an equilibrium with a continuous magnetic field, so that it is twisted both inside and outside of the tube. Ruderman and Terradas (2015) investigated standing kink waves in the same equilibrium. Recently, Bahari and Khalvandi (2017), Cheremnykh et al. (2017), Bahari, Petrukhin, and Ruderman (2020), Bahari and Ebrahimi (2020) and Bahari (2021) studied various properties of kink waves in a twisted magnetic tube in the presence of flow. Ruderman and Petrukhin (2022) considered the generation of fluting modes by a kink mode in a twisted magnetic tube.
In all previous studies the kink waves in twisted magnetic flux tubes were studied under the assumption that the cross-sectional radius does not vary along the tube. In this article we aim to study the kink waves in twisted and expanding magnetic tubes. The article is organised as follows. In the next section we formulate the problem. In Section 3 we describe the equilibrium state. In Section 4 we derive the wave equation for kink and fluting waves. In Section 5 we give the application of the obtained results to coronal seismology. Section 6 contains the summary and our conclusions.
2 Problem Formulation
We consider kink waves in a twisted magnetic tube. The plasma \(\beta\) in the solar corona is very low. In accordance with this we use the cold-plasma approximation and neglect the plasma pressure. Hence, the plasma motion is described by the system of equations
Here, is the plasma velocity, \(\rho \) the equilibrium plasma density, the equilibrium magnetic field, the magnetic field perturbation and \(\mu _{0}\) the magnetic permeability of free space.
Equations 1 and 2 must be complemented with the kinematic and dynamic boundary conditions at the magnetic tube boundary. The kinematic boundary condition is that the normal component of the plasma displacement must be continuous, and the dynamic boundary condition is that the magnetic pressure must be continuous. The linearised form of these conditions will be used in Section 4.
3 Equilibrium State
Since the plasma \(\beta\) in the solar corona is very low, the magnetic field is approximately force free. Then, the equilibrium magnetic field satisfies the equations
We consider the equilibrium with a straight magnetic flux tube and use cylindrical coordinates \(r\), \(\phi \), \(z\) with the \(z\)-axis coinciding with the tube axis. In cylindrical coordinates . Below, we assume that the equilibrium is axisymmetric, implying that is independent of \(\phi \). Then, we can write the first Equation 3 as
It follows from this equation that we can express \(B_{r}\) and \(B_{z}\) in terms of the flux function for a poloidal magnetic field \(\psi \):
The second Equation 3 implies that . Below, we assume that \(a\) is a constant. The three components of this equation are
It follows from the first and third of these equation, and the regularity condition for \(\psi \) at \(r = 0\) that
Substituting this expression in the second Equation 6 yields the equation for \(\psi \):
Below, we only need the expressions describing the equilibrium magnetic field inside the tube and its immediate vicinity, that is at the distances from the tube boundary of the order of the tube cross-section radius. The exact form of the equilibrium magnetic field far from the tube is not important because the amplitudes of the kink and fluting oscillations decay outside of the tube at a distance of the order of the characteristic tube cross-sectional radius. We note that the equilibrium magnetic field is continuous at the tube boundary.
We assume that the magnetic tube is thin, meaning that the ratio of characteristic scales in the radial and axial directions is \(\epsilon \ll 1\). In accordance with this we introduce the scaled variable \(Z = \epsilon z\). Then, it follows from Equation 4 that the ratio of the radial and axial components of the magnetic field is of the order of \(\epsilon \). This estimate prompts us to introduce the scaled magnetic field radial component \(B_{r} = \epsilon \widetilde{B}_{r}\). It follows from the stability condition (e.g. Shafranov, 1957; Kruskal and Tuck, 1958) that the magnetic twist must be weak, meaning that the ratio of the azimuthal and axial magnetic field components must be of the order of \(\epsilon \). In accordance with this estimate we introduce the scaled azimuthal component of the magnetic field \(B_{\phi }= \epsilon \widetilde{B}_{\phi}\). Introducing the characteristic spatial scale in the radial direction \(R_{\mathrm{ch}}\) we obtain from the second Equation 5 that \(\psi \sim B_{z} R_{\mathrm{ch}}^{2}\). Then, it follows from Equation 7 that \(a \sim (B_{\phi}/B_{z})R_{\mathrm{ch}}^{-1} \sim \epsilon R_{\mathrm{ch}}^{-1}\). In accordance with this estimate we write \(a = \epsilon \alpha \). Then, we transform Equation 8 into
It follows from this equation and the condition that \(\psi \) must be regular at \(r = 0\) that
where \(h(Z)\) is an arbitrary function. Using this equation and Equations 5 and 7 yields
Using these expressions we write the equations of a magnetic field line in the non-scaled variables as
It follows from these equations that the equations determining a magnetic field line are
where \(h(0) = h_{0}\). Hence, a magnetic field line is a helix with pitch \(4\pi /a\) and a variable radius.
The magnetic tube boundary must be a magnetic surface, that is, the magnetic field must be tangential to the tube boundary. Then, it is easy to show that its equation must be \(\psi = \text{const}\). Writing the equation of the tube boundary as \(r = R(Z)\) we obtain
where \(R_{0} = R(0)\). We see that we can take \(R(z)\) arbitrarily. Then, the magnetic field is defined by Equation 11.
To finalise the description of the equilibrium we also need to define the plasma density. We assume that it can vary along the tube axis, can be discontinuous at the tube boundary, and is independent of \(r\) inside the tube and outside the tube. Hence,
where \(\rho _{\mathrm{e}}(z) < \rho _{\mathrm{i}}(z)\).
4 Derivation of Wave Equation
To describe waves in magnetic flux tubes we use the linearised Equations 1 and 2:
where \(\boldsymbol{\xi} = (\xi _{r},\xi _{\phi},\xi _{z})\) is the plasma displacement related to the plasma velocity by .
4.1 Transformation of Governing Equations
The characteristic time with respect to the radial direction is \(R_{0}/V_{0}\), where \(V_{0}\) is the characteristic speed that can be taken equal to the Alfvén speed at \(z = 0\) inside the tube. On the other hand, the characteristic time with respect to the axial direction is \(\epsilon ^{-1}R_{0}/V_{0}\). This estimate inspires us to introduce the scaled time \(T = \epsilon t\). Then, using the equation we transform Equation 16 into
Below, we introduce
where \(B\) is the magnetic field magnitude and \(P\) is the magnetic pressure perturbation. It follows from the second Equation 3 that . Then, it follows from Equation 16 that .
Now, we need to obtain the equation for \(\xi _{\perp}\). To do this we take the scalar product of Equation 16 with , where and are the unit vectors in the radial and axial directions. As a result, using Equations 8, 9, and 11 we obtain
where
When deriving Equation 20 we used the relations
and took into account that \(\partial B/\partial r = \mathcal{O}(\epsilon ^{2})\). We consider \(\xi _{\perp}\) and \(\xi _{\phi}\) as quantities of the order of unity. Then, it follows from Equation 20 that \(P = \mathcal{O}(\epsilon )\). Later, we will show that \(b_{\perp}\) and \(b_{\phi}\) are of the order of \(\epsilon \), so that in fact \(P = \mathcal{O}(\epsilon ^{2})\). In accordance with this estimate we introduce the scaled magnetic pressure perturbation \(Q\) defined by \(P = \epsilon ^{2} Q\). Then, we reduce Equation 20 to
Next, we derive the equation for \(\xi _{\phi}\). For this we take the scalar product of Equation 16 with . As a result we obtain
It follows from the equation that \(\xi _{z} = \mathcal{O}(\epsilon )\). Then, we obtain \(\xi _{r} = \xi _{\perp }+ \mathcal{O}(\epsilon ^{2})\). Using this estimate we obtain from the first Equation 17
When deriving the last equation we took into account that \(P = \mathcal{O}(\epsilon ^{2})\). We also used Equation 27 when deriving Equation 26. Equations 25 and 26 show that the previously made statement that \(b_{\perp}\) and \(b_{\phi}\) are of the order of \(\mathcal{O}(\epsilon )\) is correct. Following Ruderman, Verth, and Erdélyi (2008) we use \(\psi \) as an independent variable instead of \(r\), so that \(r = r(\psi ,Z)\). Using Equation 10 we obtain that for an arbitrary function \(f\)
where the indices \(r\) and \(\psi \) indicate that a partial derivative is calculated at constant \(r\) and constant \(\psi \), respectively. Substituting \(f = r(\psi ,Z)\) in Equation 10 we obtain
Using Equations 28 and 29 we transform Equations 23 – 27 into
The next step is using Equations 25 and 26 to eliminate \(b_{\perp}\) and \(b_{\phi}\) from Equations 23 and 24. We also take all variables proportional to \(e^{{\mathrm{i}}m\phi}\), where \(|m| = 1\) corresponds to kink modes, while \(|m| \geq 2\) correspond to fluting modes. As a result, using Equation 10 we transform Equations 30, 31, and 34 into
where \(u = h^{1/2}\xi _{\perp}\), \(w = h^{1/2}\xi _{\phi}\), \(\sigma = \sqrt{2\psi}\) and \(V_{\mathrm{A}} = h(\rho \mu _{0})^{-1/2}\) is the Alfvén speed. Using Equation 37 to eliminate \(\xi _{\phi}\) from Equations 35 and 36 yields
Equations 38 and 39 are used below to derive the wave equation governing kink waves.
4.2 Governing Equation for Kink and Fluting Waves
Eliminating \(Q\) from Equations 38 and 39 yields
Looking for the solution to this equation in the form of normal modes we take \(F\) proportional to \(\exp (ikZ - i\omega T)\). Then, we obtain the dispersion equation \(\omega ^{2} = V_{A}^{2}(k + m\alpha /2)^{2}\). This dispersion equation corresponds to Alfvén waves that do not perturb the tube boundary. They propagate independently inside and outside of the tube. Eliminating these waves from our analysis we obtain \(F = 0\), that is
The two linearly independent solutions to this equation are \(u = \sigma ^{|m|-1}\) and \(u = \sigma ^{-|m|-1}\). Then, taking into account that \(u\) must be regular at \(\sigma = 0\), decay as \(\sigma \to \infty \) and be continuous at the tube boundary we obtain
where \(\sigma _{\mathrm{b}} = h^{1/2}R\) and \(\sigma = \sigma _{\mathrm{b}}\) is the equation of the tube boundary. It follows from Equation 10 that \(\sigma _{\mathrm{b}}\) is independent of \(Z\). Using Equation 42 we obtain from Equation 39
for \(\sigma < \sigma _{\mathrm{b}}\), and
for \(\sigma > \sigma _{\mathrm{b}}\). The magnetic pressure must be continuous at the tube boundary. This implies that \(Q\) must be continuous at \(\sigma = \sigma _{\mathrm{b}}\). Using this condition and returning to the non-scaled variables we obtain from Equations 43 and 44 the equation for \(W = h_{0}^{-1/2}R_{0}^{-1}U\):
where \(C_{\mathrm{k}}\) is the kink speed defined by
In the leading-order approximation \(\xi _{\perp }= \xi _{r}\). Introducing \(\eta = \xi _{r}\) at the tube boundary we obtain from Equation 42 that \(U = h^{1/2}\eta \). Then, using Equation 14 yields \(W = \eta /R\).
It is expedient to compare Equation 46 with the equation obtained in Paper I (see Equation 35 in that article). Formally, the tube expansion does not affect the form of Equation 46. It only effects the dependence of \(C_{\mathrm{k}}\) on \(z\) and the dependent variable in this equation is not \(\eta \) but \(\eta /R\). We can see that Equation 46 is different from Equation 35 in Paper I. In particular, it was obtained in Paper I that the magnetic twist does not affect kink waves corresponding to \(|m| = 1\). We can see that this is not the case in this article. The difference in results obtained in this article and in Paper I is related to the difference in the equilibrium state considered in the two articles. In Paper I the magnetic field is only twisted inside the tube, while it is not twisted outside the tube. This is not a realistic configuration because in this equilibrium the magnetic field is discontinuous at the tube boundary. This implies that there is an unphysical surface current on the tube boundary. In the present article there is no magnetic field discontinuity and the magnetic field is twisted both inside the tube as well as in its vicinity.
Substituting \(W = S\exp (-{\mathrm{i}}amz/2)\) in Equation 45 we reduce it to
This equation coincides with the similar equation derived by Ruderman, Verth, and Erdélyi (2008) for kink waves in an expanding but not twisted magnetic tube.
5 Kink Waves and Corona Seismology
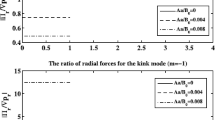
In this section we only study kink waves and take \(|m| = 1\). Since \(a\) and \(m\) are only present in Equation 45 in the form of the product \(am\) we can take \(a > 0\) without loss of generality. First, we consider propagating waves in a magnetic tube homogeneous in the axial direction. Looking for the solution to Equation 45 in the form \(W = W_{0}\exp ({\mathrm{i}}kz - {\mathrm{i}}\omega t)\) we obtain the dispersion equation
Again, without loss of generality, we can take \(k > 0\). When \(m = 1\) the wave with the frequency \(\omega _{+}\) propagates in the positive \(z\)-direction, and that with the frequency \(\omega _{-}\) in the negative \(z\)-direction. Both waves have the same phase speeds that exceed \(C_{\mathrm{k}}\). When \(m = -1\) the wave with the frequency \(\omega _{+}\) propagates in the positive \(z\)-direction, and that with the frequency \(\omega _{-}\) in the negative \(z\)-direction if \(k > a/2\). However, when \(k < a/2\) the wave with the frequency \(\omega _{+}\) propagates in the negative \(z\)-direction, and that with the frequency \(\omega _{-}\) in the positive \(z\)-direction. In both cases, the two waves have the same phase speeds that are less than \(C_{\mathrm{k}}\). Following Ruderman (2015) we call the wave with \(m = 1\) the accelerated wave, and the wave with \(m = -1\) the decelerated wave.
The observation of kink oscillations of coronal magnetic loops is one of the main tools of coronal seismology. The first application of observed kink oscillations of coronal magnetic loops to coronal seismology was made by Nakariakov and Ofman (2001) who estimated the magnetic field magnitude in coronal loops. Later, Verwichte et al. (2004) reported the simultaneous observation of two different frequencies of the kink oscillation of a coronal magnetic tube. They interpreted them as the fundamental frequency and first-overtone frequency. A remarkable property of the observational results was that the ratio of the two frequencies was less than 2. Andries, Arregui, and Goossens (2005) attributed this result to the fact that the plasma density varies along a loop. They developed a method of estimating the atmospheric scale height in the corona using observations of the fundamental frequency and the frequency of the first overtone. Dymova and Ruderman (2005) derived the equation describing kink waves in a thin magnetic tube with the density varying along the tube that makes it easy to relate the ratio of the two frequencies to the plasma density profile in a coronal loop. In particular, Dymova and Ruderman (2006) used this equation to study the effect of the coronal loop geometry on the estimate of the atmospheric scale height in the corona.
Afterwards, Ruderman, Verth, and Erdélyi (2008) showed that the equation similar to that derived by Dymova and Ruderman (2005) is valid for an expanding magnetic tube with the only difference that the dependent variable is not the loop displacement but the loop displacement divided by the tube radius. In particular, it follows from the equation derived by these authors that the decrease of the plasma density in the loop with the height reduces the ratio of the first-overtone frequency to the fundamental frequency, while the loop expansion acts in the opposite direction (see also Ruderman, Petrukhin, and Pelinovsky, 2016). This result was applied to coronal seismology by Verth, Erdélyi, and Jess (2008) to provide the correct interpretation to the observation of coronal loop kink oscillations where the frequency ratio exceeded 2 (e.g. De Moortel and Brady, 2007; O’Shea et al., 2007). They explained that these seemingly weird observational results are related to the effect of the loop expansion that overpowered the effect of the plasma density variation along the loop.
If we consider a magnetic loop with the length \(L\) then standing kink waves in this loop are described by the solutions to Equation 47 satisfying the boundary conditions
To find the eigenmodes we take \(S\) proportional to \(\cos (\omega t)\). Then, Equation 47 reduces to
This equation together with the boundary conditions in Equation 49 constitute the boundary value problem that is exactly the same as the one formulated by Ruderman, Verth, and Erdélyi (2008) in the case of expanding but untwisted magnetic tubes. This implies that the eigenfrequencies of the magnetic tube kink oscillations are not affected by the magnetic twist. This is good news for coronal seismology because it follows that the estimates of the magnetic field magnitude based on the observations of the fundamental harmonic frequency as well as the estimates of the coronal scale height based on the observations of the frequencies of the fundamental and first harmonic are not affected by the magnetic twist.
The only situation when the magnetic twist can affect seismological results is when observations of the loop displacement is used in addition to the observations of oscillation frequencies. Let us assume that only one component of the loop displacement is observed. Consider a linearly polarised oscillation of a coronal loop. If there is no twist then the direction of polarisation is the same along the loop. In particular, this implies that the loop displacement has its maximum at the loop apex. However, this is not the case in a twisted loop. Let us consider a twisted loop of the length \(L\). We introduce the auxiliary Cartesian coordinate system \(x\), \(y\), \(z\) with the \(z\)-axis coinciding with the loop axis. We assume that the loop oscillates with the fundamental frequency and the loop displacement is linearly polarised. We also assume that only the \(x\)-component of the loop displacement is observed. Obviously, we can take \(S\) in Equation 50 to be real. It follows from Equation 42 that \(\xi _{\perp}\) is independent of \(\sigma \) inside the tube. Hence, the tube is displaced as a whole without distortion. When we took all dependent variables proportional to \({\mathrm{e}}^{{\mathrm{i}}m\phi}\) we implicitly assumed that physical variables are given by the real parts of dependent variables. Restoring the \(\phi \)-dependence we obtain that the radial and azimuthal components of the tube displacement are \(\Re (\xi _{r}{\mathrm{e}}^{{\mathrm{i}}m\phi})\) and \(\Re (\xi _{\phi}{\mathrm{e}}^{{\mathrm{i}}m\phi})\), respectively, where \(\Re \) indicates the real part of a quantity. Then, the loop displacement in the \(x\)-direction is
Using Equation 37 we obtain that \(\xi _{\phi }= {\mathrm{i}}m\xi _{r}\), where \(m = \pm 1\). Using this relation we transform Equation 51 into
where \(\Im \) indicates the imaginary part of a quantity. Using the relation valid for kink waves,
and recalling that \(S\) is taken to be real we eventually obtain
We recall that \(a\) is an arbitrary positive quantity. The only restriction is that \(aL\) is on the order of unity. If we take \(S\) corresponding to the fundamental mode of kink oscillations then there are no nodes in the total loop displacement. However, this is not the case for \(\xi _{x}\). If \(a \leq \pi /L\), then \(\xi _{x}\) also does not have the nodes. When \(\pi /L < a < 3\pi /L\) then there is one node of \(\xi _{x}\) in the interval \([0,L]\). In general, there are \(n\) nodes of \(\xi _{x}\) when \(\pi n/L < a < \pi (n+2)/L\), \(n = 1,2,\dots \). In particular, if we take \(a = 2\pi /L\) then we obtain \(\xi _{x} = 0\) at \(z = L/2\), that is at the loop apex. Hence, it is possible that there is a node at the loop apex in the observed displacement in the fundamental mode. As a result, using the loop displacement we can draw an incorrect conclusion that the first overtone was observed while, in fact, it was a fundamental mode. De Moortel and Brady (2007) interpreted one of the observational results presented by Schrijver, Aschwanden, and Tilte (2002). In this observation the two frequencies were detected. The mode with the larger period has an amplitude much greater than that with the smaller period. Also, it has a node near the loop apex. On the basis of this result De Moortel and Brady (2007) suggested that the mode with the larger period was the first overtone. However, it is quite possible that the observed node was only apparent and it was related to the effect of twist, while the observed mode was fundamental.
6 Summary and Conclusions
In this article we study kink and fluting waves in expanding and twisted magnetic tubes. We use the cold-plasma and thin-tube approximations. The first approximation is viable when studying waves in the solar corona where the plasma \(\beta\) is very low. The second approximation works very well in application to structures like coronal magnetic loops because their transverse size is by about two orders of magnitude less than their lengths. We considered an axisymmetric equilibrium with the constant plasma density in the radial direction inside the tube and outside the tube. It follows from the cold-plasma approximation that the equilibrium state is force free with the electrical current proportional to the magnetic field. We made the assumption that the coefficient of proportionality is constant. In contrast to the previous two assumptions this third assumption is disputable. In general, the proportionality coefficient can depend on the spatial variables and even on the magnetic field. In the latter case the force-free equilibrium is called nonlinear. We assume that the proportionality coefficient is constant just for the sake of simplicity. We obtained that in the thin-tube approximation the magnetic field inside the tube and in its immediate vicinity is very simple. The axial component of this field is independent of the radial coordinate, while the radial and azimuthal components are proportional to the radial coordinate.
We derive the governing equation for the kink and fluting modes. It follows from this equation that there are two propagating kink wave modes in a homogeneous magnetic tube in its axial direction, the accelerated and decelerated, while in an untwisted tube there is only one propagating kink mode. The existence of the two modes is related to the magnetic twist. The phase speed of the accelerated wave mode exceeds the kink speed, while the phase speed of the decelerated wave mode is less than the kink speed.
The standing-wave modes are described by the same eigenvalue problem as in the case of an untwisted tube. This implies that twist does not affect the eigenfrequencies of kink oscillations. Hence, the account of twist does not affect the seismological results based on the observations of the frequencies of the fundamental harmonic and first overtone. The only effect related to the account of twist is the variation of the direction of polarisation of the coronal loop displacement along the loop. As a result, an apparent node can be detected near the loop apex if only one component of the loop displacement is observed. This can lead to an incorrect conclusion that the observed coronal loop kink oscillation was the first overtone, while in fact it was the fundamental mode.
Data Availability
There are no datasets.
References
Abedini, A.: 2018, Solar Phys. 293, 22. DOI.
Andries, J., Arregui, I., Goossens, M.: 2005, Astrophys. J. 624, L57. DOI.
Aschwanden, M.J., Nakariakov, V.M., Melnikov, V.F.: 2004, Astrophys. J. 600, 458. DOI.
Aschwanden, M.J., Fletcher, L., Schrijver, C.J., Alexander, D.: 1999, Astrophys. J. 520, 880. DOI.
Bahari, K.: 2018, Astrophys. J. 864, 2. DOI.
Bahari, K.: 2021, Solar Phys. 296, 126. DOI.
Bahari, K., Ebrahimi, Z.: 2020, Mon. Not. Roy. Astron. Soc. 497, 1135. DOI.
Bahari, K., Khalvandi, M.R.: 2017, Solar Phys. 292, 192. DOI.
Bahari, K., Petrukhin, N.S., Ruderman, M.S.: 2020, Mon. Not. Roy. Astron. Soc. 496, 67. DOI.
Ballai, I., Erdélyi, R.: 2002, J. Plasma Phys. 67, 79. DOI.
Bennett, K., Roberts, B., Narain, U.: 1999, Solar Phys. 185, 41. DOI.
Brooks, D.H., Warren, H.P., Ugarte-Urra, I., Matsuzaki, K., Williams, D.R.: 2007, Publ. Astron. Soc. Japan 59, S691. DOI.
Browning, P.K., Priest, E.R.: 1983, Astrophys. J. 266, 848. DOI.
Cheremnykh, O.K., Fedun, V., Kryshtal, A.N., Verth, G.: 2017, Astron. Astrophys. 604, A62. DOI.
De Moortel, I., Brady, C.S.: 2007, Astrophys. J. 664, 1210. DOI.
Dungey, J.W., Loughhead, R.E.: 1954, Aust. J. Phys. 293, 22. DOI.
Dymova, M.V., Ruderman, M.S.: 2005, Solar Phys. 229, 79. DOI.
Dymova, M.V., Ruderman, M.S.: 2006, Astron. Astrophys. 459, 241. DOI.
Ebrahimi, Z., Bahari, K.: 2019, Mon. Not. Roy. Astron. Soc. 490, 1644. DOI.
Edwin, P.M., Roberts, B.: 1983, Solar Phys. 88, 179.
Goddard, C.R., Nistico, G., Nakariakov, V.M., Zimovets, I.V.: 2016, Astron. Astrophys. 585, A137. DOI.
Goedbloed, J.P.: 1971, Physica 53, 412.
Golub, L., Herant, M., Kalata, K., Lovas, I., Nystrom, G., Pardo, F., Spiller, E., Wilczynski, L.J.: 1990, Nature 344, 842. DOI.
Goossens, M., Ruderman, M.S., Hollweg, J.V.: 1995, Solar Phys. 157, 75. DOI.
Karami, K., Bahari, K.: 2010, Solar Phys. 263, 87. DOI.
Klimchuk, J.A.: 2000, Solar Phys. 193, 53. DOI.
Klimchuk, J.A., Lemen, J.R., Feldman, U., Tsuneta, S., Uchida, Y.: 1992, Publ. Astron. Soc. Japan 44, L181.
Kruskal, J.A., Tuck, J.L.: 1958, Proc. Roy. Soc. London A 245, 222.
Kucera, T.A., Young, P.R., Klimchuk, J.A., DeForest, C.E.: 2019, Astrophys. J. 885, 7. DOI.
Li, D., Yuan, D., Gossens, M., Van Doorsselaere, T., Su, W., Wang, Y., Su, Y., Ning, Z.: 2020, Astron. Astrophys. 639, A114. DOI.
Li, D., Bai, X., Tian, H., Su, J., Hou, Z., Debg, Y., Ji, K., Ning, Z.: 2023, Astron. Astrophys. 675, A169. DOI.
López Fuentes, M.C., Klimchuk, J.A., Dómoulin, P.: 2006, Astrophys. J. 639, 459. DOI.
Morton, R.J., Weberg, M.J., McLaughlin, J.A.: 2019, Nat. Astron. 3, 223. DOI.
Morton, R.J., Tiwari, A.K., Van Doorsselaere, T., McLaughlin, J.A.: 2021, Astrophys. J. 923, 225. DOI.
Nakariakov, V.M., Ofman, L.: 2001, Astron. Astrophys. 372, L53. DOI.
Nakariakov, V.M., Ofman, L., DeLuca, E.E., Roberts, B., Davila, J.M.: 1999, Science 285, 862. DOI.
Nakariakov, V.M., Anfinogentov, S.A., Antolin, P., Jain, R., Kolotkov, D.Y., Kupriyanova, E.G., Li, D., Magyar, N., Nistico, G., Pascoe, D.J., Srivastava, A.K., Terradas, J., Farahani, S.V., Verth, G., Yuan, D., Zimovets, I.V.: 2021, Space Sci. Rev. 217, 73. DOI.
Nechaeva, A., Zimovets, I.V., Nakariakov, V.M., Goddard, C.A.: 2019, Astrophys. J. Suppl. 241, 31. DOI.
Okamoto, T.J., Tsuneta, S., Berger, T.E., Ichimoto, K., Katsukawa, Y., Lites, B.W., et al.: 2007, Science 318, 1577. DOI.
O’Shea, E., Srivastava, A.K., Doyle, J.G., Banerjee, D.: 2007, Astron. Astrophys. 473, L13. DOI.
Parker, T.J.: 1974, Astrophys. J. 191, 245.
Reale, F.: 2014, Living Rev. Solar Phys. 11, 4. DOI.
Roberts, P.H.: 1956, Astrophys. J. 124, 430.
Ruderman, M.S.: 2007, Solar Phys. 246, 119. DOI.
Ruderman, M.S.: 2015, Astron. Astrophys. 575, A130. DOI.
Ruderman, M.S., Erdélyi, R.: 2009, Space Sci. Rev. 149, 199. DOI.
Ruderman, M.S., Petrukhin, N.S.: 2022, Solar Phys. 297, 116. DOI.
Ruderman, M.S., Petrukhin, N.S., Pelinovsky, E.: 2016, Solar Phys. 291, 1143. DOI.
Ruderman, M.S., Terradas, J.: 2015, Astron. Astrophys. 580, A57. DOI.
Ruderman, M.S., Verth, G., Erdélyi, R.: 2008, Astrophys. J. 686, 694. DOI.
Ryutov, D.D., Ryutova, M.P.: 1976, Sov. Phys. JETP 43, 491.
Sakurai, T., Goossens, M., Hollweg, J.V.: 1991, Solar Phys. 133, 227. DOI.
Schrijver, C.J.: 2007, Astrophys. J. 662, L119. DOI.
Schrijver, C.J., Aschwanden, M.J., Tilte, A.M.: 2002, Solar Phys. 206, 69. DOI.
Shafranov, V.D.: 1957, J. Nucl. Energy II 5, 86.
Terradas, J., Goossens, M.: 2012, Astron. Astrophys. 548, A112. DOI.
Tomczyk, S., Card, G.L., Darnell, T., Elmore, D.F., Lull, R., Nelson, P.G., Streander, K.V., Burkepile, J., Casini, R., Judge, P.G.: 2008, Solar Phys. 247, 411. DOI.
Verth, G., Erdélyi, R., Jess, D.B.: 2008, Astrophys. J. Lett. 687, L45. DOI.
Verwichte, E., Nakariakov, V.M., Ofman, L., DeLuca, E.E.: 2004, Solar Phys. 223, 77. DOI.
Watko, J.A., Klimchuk, J.A.: 2000, Solar Phys. 193, 77. DOI.
Yang, Z.H., Bethge, C., Tian, H., Tomczyk, S., Morton, R., Del Zanna, G., McIntosh, S.W., Karak, B.B., Gibson, S., Samanta, T., He, J.S., Chen, Y.J., Wang, L.H.: 2020, Science 369, 694. DOI.
Acknowledgments
The authors gratefully acknowledge the support from RSF grant 20-12-00268.
Author information
Authors and Affiliations
Contributions
The authors equally contributed in the research.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ruderman, M.S., Petrukhin, N.S. Kink Waves in Twisted and Expanding Magnetic Tubes. Sol Phys 298, 125 (2023). https://doi.org/10.1007/s11207-023-02219-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11207-023-02219-1