
Abstract
The optimal design of gathering networks for the unconventional oil and gas production is a relevant problem, particularly with the shale boom. In this work, we address a network design problem in which the main decisions are the location and sizing of tank batteries for oil and gas separation together with the pipeline connections. The goal is to gather the oil, gas and water production from a large number of wellpads, being also possible to install junction nodes to merge the production at some points of the field. One major challenge is due to the steep production decline curves, requiring continued connections of new wells. To address this problem, we develop a complex multiperiod formulation accounting for the varying flows over the planning horizon. We propose an optimization framework to obtain efficient solutions within reasonable computational times. To circumvent the computational burden of a large-scale, nonlinear and non-convex model due to the fluid dynamics of multiphase flows, we propose a solution algorithm based on a bi-level decomposition. Near optimal solutions are found for real-world instances, suggesting that facility planning can considerably improve the economics of unconventional projects.


















Similar content being viewed by others

Availability of data and material
Not Applicable.
Code availability
Not Applicable.
Abbreviations
- BBL:
-
Barrel of oil/water
- CDP:
-
Centralized delivery point
- GOR:
-
Gas-to-oil ratio
- LM:
-
Lockhart–Martinelli
- MILP:
-
Mixed integer linear programming
- MINLP:
-
Mixed integer non-linear programming
- MSCF:
-
Thousand standard cubic feet of gas
- NLP:
-
Non-linear programming
- O&G:
-
Oil and gas
- SB:
-
SuperBattery
- TB:
-
Tank battery
- WOR:
-
Water-to-oil ratio
- B :
-
Tank batteries potential location
- BJ :
-
Battery junctions potential nodes
- BZ :
-
Batteries capacities
- C :
-
Components in the flow {oil, gas, water}
- CDP :
-
Centralized delivery points
- D :
-
Pipeline diameters
- J :
-
Potential wellpad junction nodes
- K :
-
Clusters of wellpads
- P :
-
Wellpads
- T :
-
Time in months
- B k :
-
Batteries able to receive production from cluster k
- BZ b :
-
Batteries capacities allowed at location b
- P k :
-
Wellpads that belong to cluster k
- P t :
-
Wellpads that start their production at period t
- J k :
-
Wellpad junctions that belong to cluster k
- CDP c :
-
Centralized delivery nodes available for component c
- P j − J p :
-
Wellpad-junctions possible connections
- J b − B j :
-
Junctions–batteries possible connections
- B bj − BJ b :
-
Batteries–batteries junctions possible connections
- CDP bj − BJ cdp :
-
Batteries junctions—centralized facilities possible connections
- TP :
-
Subset of periods with some wellpad increasing its production or reaching production peak
- TS :
-
Subset of periods with some wellpad starting its production
- dist p,j/dist j,b/dist b,bj/dist bj,cdp :
-
Euclidean distances between nodes
- i_jun j/i_junb bj :
-
Installation costs of a junction
- c_jun :
-
Costs per unit of volume being gathered in a junction node
- P j :
-
Minimum pressure at junction nodes
- P bj :
-
Estimated pressure after separation at battery junction nodes
- P gc :
-
Pressure after gas compression
- P cdp :
-
Pressure at the centralized delivery point
- \(\mu\) :
-
Synthesizes unit conversion and fluid parameters
- i :
-
Interest rate to assess the cash flows
- ε :
-
Roughness of the pipe
- \({\rho }^{LP}\) :
-
Average density of the liquid phase
- \({\rho }^{GP}\) :
-
Density of the gas phase
- \({\Delta p}^{max}\) :
-
Maximum pressure drop admitted
- \({\mu }^{LP}\) :
-
Average viscosity of the liquid phase
- \({\mu }^{GP}\) :
-
Viscosity of the gas phase
- T 0 :
-
Standard temperature conditions
- P 0 :
-
Standard pressure conditions
- T :
-
Average flow temperature
- P in :
-
Maximum pressure at the inlet of a pipeline
- z :
-
Compressibility factor
- r :
-
Gas/liquid ratio (ft3/bbl)
- sg :
-
Specific gravity of liquid phase relative to water
- s :
-
Specific gravity of the gas relative to air
- ζ:
-
SPE specific constant according to the flow regimen
- starttime p :
-
Start time (in months) for the production of wellpad p
- gor p :
-
Gas to oil ratio in the flows produced by pad p
- wor p :
-
Water to oil ratio in the flows produced by pad p
- \({v}_{p,\tau }^{c}\) :
-
Production of component c at wellpad p, t periods after its start date
- P p :
-
Flow pressure at the outlet of the wellpad p
- \({batcap}_{bz}^{c}\) :
-
Maximum flow rate of component c allowed by a battery with capacity bz
- i_bat bz :
-
Cost of a battery of type bz
- c_bat bz :
-
Costs per unit of volume being processed in a battery of size bz
- P b :
-
Minimum inlet pressure at tank batteries
- diam d :
-
Diameter of the pipeline d
- i_pipe d :
-
Unit investment cost of a pipeline of diameter d
- c_pipe d :
-
Unit operating cost of a pipeline of diameter d per unit of volume being transported
- vmax LP :
-
Maximum linear velocity of the liquid phase
- \({\widehat{x}}_{p,j,d,t}\) :
-
1 If a pipeline of diameter d connecting pad p to junction node j is installed at period t
- \({\widehat{y}}_{j,b,d,t}\) :
-
1 If a pipeline of diameter d connecting node j to battery b is installed at period t
- \({\widehat{u}}_{b,bj,d,t}^{c}\) :
-
1 If a pipeline of diameter d for component c connecting TB b and junction bj is installed at period t
- \({\widehat{w}}_{bj,cdp,d,t}^{c}\) :
-
1 If a pipeline of diameter d for component c connecting junction bj with cdp is installed at period t
- \({\widehat{z}bat}_{b,bz,t}\) :
-
1 If a battery of capacity bz is installed in the location b at period t
- \({\widehat{z}cdp}_{cdp,t}\) :
-
1 If the delivery point cdp is installed at period t
- \({zbat}_{b,bz,t}\) :
-
1 If a battery of capacity bz is available at location b during period t
- \({zcdp}_{cdp,t}\) :
-
1 If the delivery point cdp is active during period t
- \({x}_{p,j,d,t}\) :
-
1 If a pipeline of diameter d connecting pad p to junction node j is available at period t
- \({y}_{j,b,d,t}\) :
-
1 If a pipeline of diameter d connecting node j to battery b is available at period t
- \({u}_{b,bj,d,t}^{c}\) :
-
1 If a pipeline of diameter d for component c connecting TB b and junction bj is available at period t
- \({w}_{bj,cdf,d,t}^{c}\) :
-
1 If a pipeline of diameter d for component c connecting junction bj with cdp is available at period t
- \({FP}_{p,j,t}^{c}\) :
-
Flow of component c from wellpad p to junction node j during period t
- \({FPB}_{j,b,t}^{c}\) :
-
Flow of component c from junction node j to battery b during period t
- \({FBJ}_{b,bj,t}^{c}\) :
-
Flow of component c from battery b to battery junction bj during period t
- \({FCDP}_{bj,cdp,t}^{c}\) :
-
Flow of component c from battery junction bj to delivery point cdp during period t
- VS LP :
-
Superficial velocity of liquid phase (water + oil)
- VS GP :
-
Superficial velocity of gas phase
- RY LP :
-
Reynolds number for liquid phase
- RY GP :
-
Reynolds number for gas phase
- HFF LP :
-
Friction factor for liquid phase following Haaland equation
- \({maxflow}_{d}^{c}\) :
-
Single-phase transportation capacity for component c in a pipeline of diameter d
- \({\Delta P}^{LP}/L\) :
-
Pressure drop gradient for liquid phase
- \({\Delta P}^{GP}/L\) :
-
Pressure drop gradient for gas phase
- X LM :
-
Lockhart–Martinelli parameter
- Y LP :
-
Liquid phase multiplier for Lockhart–Martinelli
- Y GP :
-
Gas phase multiplier for Lockhart–Martinelli
- \(\Delta P/L\) :
-
Pressure drop for multiphase flow per unit of length
- \({\Delta P}^{Total}\) :
-
Total pressure drop in a pipeline segment
- \({P}_{in}\) :
-
Inlet pressure
- \({P}_{out}\) :
-
Outlet pressure
References
Accenture (2014) Achieving high performance in unconventional operations
Al-Hadhrami LM, Shaahid SM, Tunde LO, Al-Sarkhi A (2014) Experimental study on the flow regimes and pressure gradients of air-oil-water three-phase flow in horizontal pipes. Sci World J. https://doi.org/10.1155/2014/810527
Alvarez LP, Mohan RS, Shoham O, Avila C (2010) Multiphase flow splitting in parallel/looped pipelines. In: SPE annual technical conference and exhibition. Society of Petroleum Engineers
Azzopardi BJ, Smith PA (1992) Two-phase flow split at T junctions: effect of side arm orientation and downstream geometry. Int J Multiph Flow 18:861–875. https://doi.org/10.1016/0301-9322(92)90064-N
Baihly J, Malpani R, Altman RM, et al (2015) Shale gas production decline trend comparison over time and basins revisited. In: Proceedings of the 3rd unconventional resources technology conference. American Association of Petroleum Geologists, Tulsa
Cafaro DC, Grossmann IE (2014) Strategic planning, design, and development of the shale gas supply chain network. AIChE J 60:2122–2142
Dbouk HM, Hayek H, Ghorayeb K (2020) Modular approach for optimal pipeline layout. J Pet Sci Eng. https://doi.org/10.1016/j.petrol.2020.107934
Drouven MG, Grossmann IE (2016) Multi-period planning design, and strategic models for long-term. Qual Sens Shale Gas Dev. https://doi.org/10.1002/aic
Drouven MG, Grossmann IE (2017) Mixed-integer programming models for line pressure optimization in shale gas gathering systems. J Pet Sci Eng 157:1021–1032. https://doi.org/10.1016/j.petrol.2017.07.026
Duran MA, Grossmann IE (1986) A mixed-integer nonlinear programming algorithm for process systems synthesis. AIChE J 32:592–606. https://doi.org/10.1002/aic.690320408
Edwards L, Dhanpat D, Chakrabarti DP (2018) Hydrodynamics of three phase flow in upstream pipes. Cogent Eng. https://doi.org/10.1080/23311916.2018.1433983
Green DW, Southard MZ (2018) Perry’s chemical engineers’ handbook, 9th edn. McGraw-Hill Education, New York
Guerra OJ, Calderón AJ, Papageorgiou LG, Reklaitis GV (2019) Integrated shale gas supply chain design and water management under uncertainty. AIChE J 65:924–936. https://doi.org/10.1002/aic.16476
Gupta V, Grossmann IE (2012) An efficient multiperiod MINLP model for optimal planning of offshore oil and gas field infrastructure. Ind Eng Chem Res 51:6823–6840. https://doi.org/10.1021/ie202959w
Hong B, Li X, Di G et al (2019) An integrated MILP method for gathering pipeline networks considering hydraulic characteristics. Chem Eng Res Des 152:320–335. https://doi.org/10.1016/j.cherd.2019.08.013
Hong B, Li X, Di G et al (2020) An integrated MILP model for optimal planning of multi-period onshore gas field gathering pipeline system. Comput Ind Eng 146:106479. https://doi.org/10.1016/j.cie.2020.106479
Liu K, Biegler LT, Zhang B, Chen Q (2020) Dynamic optimization of natural gas pipeline networks with demand and composition uncertainty. Chem Eng Sci 215:115449. https://doi.org/10.1016/j.ces.2019.115449
Lockhart R, Martinelli RC (1949) Proposed correlation of data for isothermal two-phase, two-component flow in pipes. Chem Eng Prog 45:38–48
Mah RSH, Shacham M (1978) Pipeline network design and synthesis. Advances in Chemical Engineering 10:125–209. https://doi.org/10.1016/S0065-2377(08)60133-7
Montagna AF, Cafaro DC (2019) Supply chain networks servicing upstream operations in oil and gas fields after the shale revolution. AIChE J. https://doi.org/10.1002/aic.16762
Oddie G, Shi H, Durlofsky LJ et al (2003) Experimental study of two and three phase flows in large diameter inclined pipes. Int J Multiph Flow 29:527–558. https://doi.org/10.1016/S0301-9322(03)00015-6
Peng Z, Li C, Grossmann IE, Kwon K, Shin J, Feng Y (2021) Multi-period design and planning model of shale gas field development. AIChE J 67:e17195 (https://aiche.onlinelibrary.wiley.com/doi/10.1002/aic.1719)
Petalas N, Aziz K (2000) A mechanistic model for multiphase flow in pipes. J Can Pet Technol 39:43–55. https://doi.org/10.2118/00-06-04
Rexilius J (2015) The well factory approach to developing unconventionals: a case study from the permian basin wolfcamp play. In: SPE/CSUR Unconv Resour Conf
Sahinidis, NV (2021) BARON 21.1. 13: global optimization of mixed-integer nonlinear programs, User's manual.
Society of Petroleum Engineers (2006) Petroleum engineering handbook
Spedding PL, Donnelly GF, Cole JS (2005) Three phase oil-water-gas horizontal co-current flow: I. Experimental and regime map. Chem Eng Res Des 83:401–411. https://doi.org/10.1205/cherd.02154
Spedding PL, Benard E, Donnelly GF (2006) Prediction of pressure drop in multiphase horizontal pipe flow. Int Commun Heat Mass Transf 33:1053–1062. https://doi.org/10.1016/j.icheatmasstransfer.2006.05.004
Stevens P (2012) The ‘ shale gas revolution’: developments and changes. Chatham House, London
Tan L, Zuo L, Wang B (2018) Methods of decline curve analysis for shale gas reservoirs. Energies 11:552. https://doi.org/10.3390/en11030552
U.S. Energy Information Administration (EIA) (2018) Annual energy outlook 2018 with projections to 2050. Washington, DC
Vanorsdale CR (2013) Production decline analysis lessons from classic shale gas wells. In: SPE annual technical conference and exhibition. Society of Petroleum Engineers
Weymouth T (1912) Problems in natural gas engineering. ASME Trans 34:185–231
Wilkes JO (2005) Fluid mechanics for chemical engineers, 2nd edn. Prentice Hall, London
Wolsey LA (1998) Integer programming, 1st edn. Wiley-Interscience, New York
Worthen RA, Henkes RA (2015) CFD for the multiphase flow splitting from a single flowline into a dual riser. In: SPE annual technical conference and exhibition
Zaghloul J, Adewumi M, Ityokumbul MT (2008) Hydrodynamic modeling of three-phase flow in production and gathering pipelines. J Energy Resour Technol Trans ASME 130:0430041–0430048. https://doi.org/10.1115/1.3000135
Zhang H, Liang Y, Zhang W et al (2017) A unified MILP model for topological structure of production well gathering pipeline network. J Pet Sci Eng 152:284–293. https://doi.org/10.1016/j.petrol.2017.03.016
Acknowledgements
Financial support from Fulbright Commission Argentina, Bunge y Born and Williams Foundations, National University of Litoral and CONICET is gratefully acknowledged. Financial support from ExxonMobil Upstream Research Company through the Center of Advanced Process Decision-making at Carnegie Mellon University is also gratefully acknowledged.
Funding
Financial support from Fulbright Commission Argentina, Bunge y Born and Williams Foundations, University of Litoral and CONICET. Financial support from ExxonMobil Upstream Research Company through the Center of Advanced Process Decision-making at Carnegie Mellon University.
Author information
Authors and Affiliations
Contributions
AFM Conceptualization, Methodology, Data Curation, Investigation, Visualization, Software, Formal analysis, Writing-original manuscript, Writing-review and editing. DCC Conceptualization, Methodology, Investigation, Formal analysis, Visualization, Writing-original manuscript, Writing-review and editing. IEG Conceptualization, Supervision, Validation, Writing-review and editing, Project Administration, Funding Acquisition. DB Conceptualization, Data Curation, Visualization, Validation, Resources. YS Conceptualization, Methodology, Validation, Resources. X-HW Conceptualization, Methodology, Validation, Supervision, Project Administration. KF Conceptualization, Methodology.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix 1: Maximum flow in single phase pipelines
1.1 Liquid phase pipelines
When sizing liquid phase pipelines petroleum engineers seek to avoid corrosion, erosion and water hammer effect, among other negative phenomena associated with the flow velocity. Based on that, they usually impose a maximum mean velocity (\(vma{x}^{LP}\)) around 1.5 m/s (Society of Petroleum Engineers 2006). Equation 23 determines the maximum flow (in m3/s) for oil and water phases when linking tank batteries with battery junction nodes and these with central delivery points through a pipeline of diameter diamd (in m). In other words, the maximum admissible flow is assumed to be directly proportional to the pipeline section.
1.2 Gas phase pipelines
The compressibility of the gas phase makes the calculations of the pipeline transportation capacity more complex. Similar to Cafaro and Grossmann (2014) and Duran and Grossmann (1986), the head loss in a given pipeline segment of diameter diamd (in m) and length l (in km) is assumed to follow the Weymouth correlation (Weymouth 1912) for gas pipelines sizing, represented by Eqs. 24 and 25. The value of the gas density \({\rho }^{GP}\) is set to 0.729 kg/m3 for shale gas in standard conditions (P0 = 0.1013 MPa; T0 = 288.9 K). T is the average gas temperature (in this work, equal to T0) and the value of \(\alpha\) from the Weymouth correlation is 3/16. In the most general case, input and output pressures (Pin and Pout, in MPa) are model variables, whereas in model approximations they are assumed to be known (see Appendix 4). The final Eq. 26 represents the gas flow computation (in 106 m3/day).
Notice that \({maxflow}_{d}^{gas}\) is proportional to: (1) the pipeline diameter to the power of 2.667, and (2) the square root of the difference of squared inlet and outlet pressures.
Appendix 2: Lockhart–Martinelli correlation
This procedure is aimed at predicting the pressure drop for fully developed horizontal gas–liquid flows, and is widely used in the Chemical Engineering field (Green and Southard 2018; Lockhart and Martinelli 1949). It is based on the calculation of the pressure drops that would be expected for each of the phases as if flowing alone through the pipeline. Then, the Lockhart–Martinelli parameter is computed as the square root of the ratio between the individual expected pressure drops. Finally, the overall two-phase pressure drop is estimated by using phase-specific multipliers that are obtained from nonlinear correlations with the LM parameter. We assume oil and water streams as part of a common liquid phase. Even though this is not entirely valid since oil and water phases are not miscible, generating particularly complex flow-patterns, the assumption is made to gain simplicity. In fact, as reviewed by Edwards et al. (2018), the pressure drop might be affected by the apparent viscosity of the liquid mixture, which depends on the water fraction. However, in our view, this assumption does not excessively affect the pressure drops computations since the gor and wor are constant terms in our model.
From Eq. 27 we obtain the ratios between the component flow rates. Equation 28 computes the superficial velocities for liquid (VSLP) and gas (VSGP) phases, while Eq. 29 determines the estimated Reynolds numbers for liquid and gas phases (RYLP–RYGP). The remaining parameters account for: diamd, the pipeline diameter [m], \(\rho\) and \(\mu\), the average density [kg/m3] and viscosity [Pa.s] of each phase, respectively. The friction factor \({HFF}^{LP}\) for the liquid phase is computed through the Haaland correlation in Eq. 30, while the pressure drop gradient \({\Delta P}^{LP}/L\) is estimated by Eq. 31, as if the liquid phase were flowing alone in the pipeline. The parameter ε accounts for the pipeline internal wall roughness [m]. For the gas phase, the Weymouth equation (Weymouth 1912) estimates a pressure gradient along the pipeline, as in Eq. 32.
Note that in the most general case, only the pressure at the wellpads is given. As the gas flow FPgas increases, the difference of square pressures (P2in – P2out) also increases, leading to a larger single-phase pressure gradient \({\Delta P}^{GP}/L\) (Eq. 33). The other parameters account for the average gas temperature T [K], the temperature T0 [K] and pressure P0 [MPa] in standard conditions. Also, the inlet pressure Pin has an upper limit according to the segment of the network being considered. It can be easily proved that \({\Delta P}^{LP}/L\) and \({\Delta P}^{GP}/L\) are strictly increasing functions with the oil flow rate, for fixed gor and wor.
The Lockhart–Martinelli parameter XLM is a measure of the relation between the single-phase pressure gradients, which is computed by Eq. 34. The corresponding multipliers YLP and YGP are obtained in Eq. 35 to determine how much the single-phase pressure gradients are increased when both phases are flowing together in a multiphase flow. The latter equation follows the Wilkes approach (Wilkes, 2005) to fit the curves of the LM correlation (see Fig.

Liquid and gas pressure gradient multipliers versus Lockhart–Martinelli parameter
19). The parameter n depends on the flow regime of each phase, being equal to 4.12 if both liquid and gas phases have a turbulent regime, as usually seen in practice for unconventional streams. The overall multiphase pressure gradient \(\Delta P/L\) is computed by Eq. 36 and the total pressure drop \({\Delta P}^{Total}\) is given by Eq. 37. The maximum pressure drop (\({\Delta p}^{max}\)) is set according to the operating conditions of the manifolds and the tank batteries. Note that the overall pressure gradient \(\Delta P/L\) is also a strictly increasing function with the oil flow rate, for fixed gor and wor.
2.1 SPE (society of petroleum engineers) guidelines
According to the SPE (Society of Petroleum Engineers 2006), some recommendations should be taken into account to determine the diameter of a multiphase pipeline. These are related to maximum and minimum velocity constraints to prevent erosion, corrosion, noise or water hammer effects. The maximum velocity recommended by the SPE is 60 ft/s to inhibit noise, and 50 ft/s for CO2 corrosion inhibition. In turn, a minimum velocity of 10 to 15 ft/s is usually set to prevent surging and keep the line swept clear of solids.
The SPE guidelines for multiphase pipeline design and sizing are then added to the formulation. Equation 38 limits the flow in order not to exceed the maximum velocity vmax [ft/s], according to the given pipeline diameter. The parameter vmax is computed as the ratio between the constant ζ and the square root of the average density \({\rho }_{avg}\). ζ is an SPE specific constant with a value of 150 for solids-free fluids and continuous service operation. The average density is also a parameter computed as shown in Eq. 39. Moreover, z is the gas compressibility factor, r the gas/liquid ratio [ft3/bbl], T the gas/liquid flowing temperature [°R], \({P}_{in}\) the inlet pressure in PSI, sg the specific gravity of the liquid phase relative to water, and s the specific gravity of the gas, relative to air.
Appendix 3: Multiphase maximum flow computation
These illustrative examples are developed to show the results of the NLP formulation when applied to a horizontal pipeline segment with given inlet and outlet pressures.
3.1 Illustrative example 1
To estimate the transportation capacity of a pipeline segment, assume we are given two nodes: (1) the origin, representing the outlet of a wellpad with a pressure of 250 PSI (1.72 MPa), connected by a pipeline of diameter d and length dist with (2) a junction node with a pressure of 200 PSI (1.37 MPa) (see Fig.

Setting pressures in a pipeline segment
20). The NLP formulation is solved assuming ten different segment lengths: 250, 500, 750, 1000, 1250, 1500, 2000, 3000, 4500 and 6000 m. gor and wor values are fixed at 2 and 3.5 respectively, whereas alternative pipeline diameters are 8″, 12″ and 16”.
Figure

Maximum flows in multiphase pipelines for different diameters (only oil flowrates shown for reference)
21 shows the results after solving the NLP formulation for the maximum flow determination. For every diameter, the maximum flowrate is a decreasing function with the length. Some interesting conclusions can be drawn. First, there is an important increase in the maximum flowrate with the pipeline diameter. The increase is larger for shorter pipelines. Second, for a given pipeline diameter the SPE guidelines generate a unique result, independent of the length. This indicates that, for shorter pipelines, the SPE guidelines are more restrictive than the Lockhart–Martinelli (LM) correlation (dotted lines). The red circles represent the length at which the LM and SPE determine the same maximum admissible flow. In longer pipelines, the LM procedure restricts the flow to limit the head losses, while the SPE guidelines restrict the flow in shorter pipelines to avoid damage.
3.2 Illustrative example 2
We now change the gor and wor values with the aim of studying the effects of the different phases. We analyze three conditions: (1) gor = 2 and wor = 3.5 (444 standard cubic feet of gas per barrel of liquid, i.e. oil and water), (2) gor = 3 and wor = 2 (1000 [scf/bbl]), and (3) gor = 4 and wor = 2 (1333 [scf/bbl]). Figure

Results for the Illustrative Example 2
22 shows the maximum flows for each individual component through a pipeline segment of 8″ in diameter with different lengths. Note that, for the first two scenarios, the maximum oil flowrates are similar. The increase in the gas flowrate is compensated by the increase of oil concentration in the liquid phase. However, in the third scenario, both oil and water flowrates decrease due to the greater proportion of gas in the flow.
Next, we study the behavior of the NLP model when the gor and wor move towards extreme values (gor = 10 and wor = 0.5). By comparing with the first scenario (gor = 2, wor = 3.5) it is observed that the maximum oil flowrate decreases at the expense of a larger increase in the gas flow (see Fig.

Results of the NLP (pipeline sizing) model when gor and wor move to extreme values
23). Additionally, the SPE criteria impose an upper bound on the gas flowrate that is stronger for longer segments, before changing to the LM bounds.
Appendix 4: Pressure estimations for pipeline sizing
The values in Fig.

Setting pressures at the nodes of the network
24 are the reference pressures at every node in the network when the optimization framework is performed. In the most general case, only wellpads and compressors pressures are given, while the others stand for optimization variables. We assume that the pressure at the wellheads is high enough to make oil, gas and water flow towards the tank batteries. Even though in certain cases the pressure reaches 650 PSI (4.48 MPa) a conservative value of 250 PSI (1.72 MPa) is assumed at the outlet of the wellpads. For the purpose of pipeline sizing, the inlet pressure at tank batteries has to be of at least 80 PSI (0.55 MPa), resulting in a maximum pressure drop of 170 PSI. The distance between wellpads and junctions will be generally short, leading us to arbitrarily set the maximum pressure drop in these segments to 50 PSI (0.34 MPa). From junction nodes to batteries the pipelines operate at medium–low pressures, being the maximum head loss equal to 120 PSI (0.82 MPa). After the stream flows are separated in the tank batteries, the pressure is assumed to drop to 40 PSI at the tank battery junctions, where pumps and compressors push the fluids to the CDP at high pressure conditions. Gas pressure after compression reaches 1100 PSI, which is assumed to drop to 580 PSI at the centralized delivery point. Note that, if pipelines are not used at their maximum capacities, the outlet pressures can be larger, but never smaller than the reference values.
Appendix 5: Steps of the solution algorithm
5.1 Pre-processing step
According to the maximum flowrate estimation, for both multiphase and single-phase pipeline segments, straightforward logic can be applied to reduce the size of the problem without affecting the quality of the solutions:
-
For every wellpad-junction connection, the maximum flowrate over time is known in advance according to the wellpad production forecast. Hence, it is possible to minimize the pipeline costs by selecting the minimum diameter d that is able to handle the production peak of the wellpad. This is achieved by fixing the xp,j,d’ variables to zero for all d’ ≠ d.
-
For connections between junction nodes and tank batteries, the minimum flow to be transported is that coming from the less productive wellpad that might be connected to j. Then, it is possible to omit every diameter d that is not able to handle at least the production of that single wellpad.
-
Also, the maximum processing capacity of a single tank battery limits the flow in the segments connecting j with b. From that, one can omit alternative diameters that are larger than required.
5.2 MILP formulation with investments at the initial time
A strong assumption is introduced in this section to reduce the size of the MILP formulation, and thereby improving its computational performance. We assume that all the facilities selected by the model are installed and made available at time zero, yielding a compact formulation with a large reduction in the model size, both in variables and equations.
5.2.1 Model reformulation
The main changes with regards to the multiperiod MILP are as follows. Regarding the binary variables, all decisions related to the installation of a facility after the first period are omitted, as stated by Eqs. 40 and 41.
Moreover, after solving the simplified MILP, it is important to compute the actual net present cost of every facility by postponing the capital expenditures to the time they are used for the first time, according to the network design. These computations are introduced to determine the net present cost of the solution, which is comparable with those yielded by the original MILP.
It is also interesting to note that this formulation yields feasible solutions for the multiperiod MILP model presented in Sect. 5.2. This can be easily proved by considering that: (a) every solution of the reduced MILP model is a solution in the multiperiod approach, and (b) the objective function in the multiperiod MILP is always lesser or equal to the total present cost in the reduced MILP. The implications are: (1) the simplified MILP formulation with investments at the initial time is a valid starting point for the original MILP model, and (2) it imposes a valid upper bound to the optimal solution of the MILP.
5.3 Bounds on the number of tank batteries
In this section, an iterative procedure is developed to establish the minimum and maximum number of tank batteries among which the optimal solution lies. This reduces the feasible region of the problem, limits the combination of potential locations to be activated, and also improves the search for a lower bound of the objective function.
5.3.1 Heuristic determination of the number of tank batteries
The minimum number of tank batteries required (MinBat) is determined by adding Eq. 42 to the MILP, where the parameter nTB is iteratively increased (starting from 1) until the problem becomes feasible, as shown in Fig.

Heuristic Determination of the number of tank batteries. *Adapted for feasibility search. **#TB = all potential TB locations. ***Checked during the first 2 h of CPU usage for every iteration
25. In other words, it seeks to determine the minimum number of TB at which the problem becomes feasible, regardless of the quality of the solution. Note that many constraints of the original formulation can be relaxed in order to improve this procedure. Particularly, we may relax pipeline sizing equations yielding a simple pad-battery assignment problem.
On the other hand, by imposing a minimum number of batteries to use (through the same parameter nTB) we can determine the number of tank batteries (MaxBat) above which the solution is guaranteed to be suboptimal (Eq. 43). Taking into consideration the best integer solution found so far, the heuristic procedure starts with a large value for nTB (in an extreme case, all potential tank batteries are enforced to be used), and compares the lower bound of the branch and bound search with the best solution. If the lower bound exceeds the net present cost of the best solution found, the total number of batteries has to be smaller than the imposed value, interrupting the execution, reducing the value of nTB by 1 and repeating the procedure, as depicted in Fig. 25.
5.4 Lower bound improvement strategies
In this section, we introduce the concept of SuperBatteries and new topological constraints for cutting off suboptimal solutions. Both ideas aim to provide better optimality gaps for the overall problem.
5.4.1 SuperBatteries (SB) concept
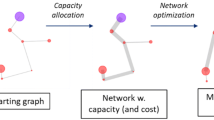
We seek to aggregate the tank batteries capacities within the same geographical location, looking for a valid relaxation whose optimal solution has a much faster convergence. Through the synthesis of multiple batteries, the element SB replaces the tank batteries in the same site with a SuperBattery with a capacity that is an integer multiple of a single battery, which is captured by the aggregate integer variable nBat (see Fig.

Original topology (left) and SuperBattery topology (right) of the problem
26).
We prove that this aggregation provides a valid lower bound for the original problem because: (1) every solution in the original problem is also a solution of the SB relaxation (it is simply obtained by summing single flows reaching the SB); and (2) the objective function of the SB relaxation is always lesser or equal to that in the original formulation. More specifically, from the original Eq. 5, adding up the incoming flows to the potential tank batteries in every SuperBattery location SB (as in Eqs. 44 and 45), it is possible to obtain the integer variable \(nba{t}_{{\varvec{s}}{\varvec{b}},bc}\) as the sum of the corresponding \(zba{t}_{b,bc}\) binary variables. Clearly, the number of SuperBatteries may be significantly smaller than the tank batteries in the original formulation, which allows to: (1) reduce the model size, and (2) reduce the problem complexity by cutting off the number of potential links between junctions and tank batteries (now SuperBatteries).
However, the relaxation gives rise to two important issues: first, it may lead to almost feasible solutions, which is illustrated in Fig.

Aggregate/disaggregate assignment of wellpads when the SuperBattery relaxation is applied
27. In that example, 11 wellpads are developed and assigned month after month to a double-capacity SuperBattery, but it turns to be impossible to re-assign the flows to the individual tank batteries without exceeding their single capacities. Secondly, it tends to consolidate flows from many wellpads into a single junction before sending them to the SB, as observed in Fig.

Infeasible gathering of the production into a single pipeline (left), which is overcome by limiting the intermediate pipeline’s capacity (right)
28 (left). That solution is infeasible in terms of the original formulation since a single flow towards the SB exceeds the capacity of a single tank battery. To overcome this issue, Eq. 46 can be added to the relaxation, which also turns out to be an effective tightening constraint. Other topological constraints to cut off infeasible solutions are developed in the next section.
5.4.2 Topological constraints to cutoff infeasible solutions
It is worth to analyze how we can gather the production from a given cluster of wellpads in order to add special topological constraints. More specifically, we may determine if the total production from a cluster of wellpads can be sent to a single tank battery, or, in other words, determine the maximum number of wellpads from a cluster whose production can be merged in a single junction. Figure

Effects of gathering the total production from a cluster of wellpads in a single tank battery
29 shows the cumulative production of 4 wellpads of the same cluster (each of them with an initial production peak of 22,750 bbl/day of water). Note that production start dates are planned for periods 38, 41, 44 and 46, yielding an excess of 7.3% above the capacity of the largest possible tank battery.
Therefore, installing a single junction node in that cluster is an infeasible option. Two ways to avoid this are illustrated in Fig.

Logic of topological cuts
30. The first option is to install at least two junction nodes in that cluster, and the second is by sending the production of at least one of the wellpads to a junction of another cluster of wellpads. This can be generalized and applied to the models through Eq. 47. This constraint limits the number of pipelines in the cluster k connected to a junction j to be lesser or equal to the maximum number of wellpads nwk from the same cluster k whose production can be merged and processed by a single tank battery.
Rights and permissions
About this article

Cite this article
Montagna, A.F., Cafaro, D.C., Grossmann, I.E. et al. Pipeline network design for gathering unconventional oil and gas production using mathematical optimization. Optim Eng 24, 539–589 (2023). https://doi.org/10.1007/s11081-021-09695-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11081-021-09695-z