
Abstract
This paper investigates a discrete-time (DT) adaptive optimal control policy based on broad learning system (BLS) and adaptive dynamic programming (ADP) for dynamic positioning (DP) of marine vessels, focusing on the unknown system dynamics, fuel saving and pollution reduction. Firstly, a BLS-based model structure in ADP is utilized to identify the unknown system dynamics. The weights of this flat architecture can be calculated without the process of iteration. Then, critic and action structures in ADP are established by two BLSs to solve the optimal problems of fuel saving and pollution reduction. These two structures are utilized to approximate the optimal performance index function and controller, respectively. The weights of these two structures are updated with the current and historical data. The proposed adaptive optimal controller is proved to be able to hold the vessel at a fixed position and heading in a more energy-saving and time-saving way than traditional neural network (NN)-based ADP method. It is proved that all the signals in the closed-loop DP system guarantee the uniform ultimate boundedness (UUB) simultaneously. Finally, simulations and comparisons are provided to illustrate the validity of the proposed adaptive optimal control scheme.













Similar content being viewed by others

References
International maritime organization (IMO).: Guidelines for vessels with dynamic positioning systems. MSC/Circ.645 (1994)
Du, J., Hu, X., Liu, H., Chen, C.P.: Adaptive robust output feedback control for a marine dynamic positioning system based on a high-gain observer. IEEE Trans. Neural Netw. Learn. Syst. 26(11), 2775–2786 (2015)
Balchen, J. G., Jenssen, N. A., Mathisen, E., Sælid, S.: Dynamic positioning of floating vessles based on Kalman filtering and optimal control. In 1980 19th IEEE Conference on Decision and Control including the Symposium on Adaptive Processes, pp. 852–864. IEEE (1980)
Loria, A., Fossen, T.I., Panteley, E.: A separation principle for dynamic positioning of ships: theoretical and experimental results. IEEE Trans. Control Syst. Technol. 8(2), 332–343 (2000)
Fossen, T.I., GrØvlen, A.: Nonlinear output feedback control of dynamically positioned ships using vectorial observer backstepping. IEEE Trans. Control Syst. Technol. 6(1), 121–128 (1998)
Liu, H., Chen, G.: Robust trajectory tracking control of marine surface vessels with uncertain disturbances and input saturations. Nonlinear Dyn. 100, 3513–3528 (2020)
Hu, X., Wei, X., Zhang, H., et al.: Global asymptotic regulation control for MIMO mechanical systems with unknown model parameters and disturbances. Nonlinear Dyn. 95, 2293–2305 (2019)
Du, J., Hu, X., Krstić, M., Sun, Y.: Dynamic positioning of ships with unknown parameters and disturbances. Control Eng. Pract. 76, 22–30 (2018)
Hu, X., Du, J.: Robust nonlinear control design for dynamic positioning of marine vessels with thruster system dynamics. Nonlinear Dyn. 94, 365–376 (2018)
Guan, Z., Ma, Y., Zheng, Z., et al.: Prescribed performance control for automatic carrier landing with disturbance. Nonlinear Dyn. 94, 1335–1349 (2018)
Lin, X.G., Nie, J., Jiao, Y., et al.: Nonlinear adaptive fuzzy output-feedback controller design for dynamic positioning system of ships. Ocean Eng. 158, 186–195 (2018)
Sælid, S., Jenssen, N.A., Balchen, J.G.: Design and analysis of a dynamic positioning system based on Kalman filtering and optimal control. IEEE Trans. Automat. Control 28, 31–339 (1983)
Xu, H., Qu, Y., Yu, W.: Inverse optimal backstepping control of dynamic positioning ships. J. Dalian Univ. Technol. 57(1), 46–54 (2017)
Veksler, A., Johansen, T.A., Borrelli, F., Realfsen, B.: Dynamic positioning with model predictive control. IEEE Trans. Control Syst. Technol. 24(4), 1340–1353 (2016)
Ho, W.H., Chen, S.H., Chou, J.H.: Optimal control of Takagi-Sugeno fuzzy-model-based systems representing dynamic ship positioning systems. Appl. Soft Comput. 13(7), 3197–3210 (2013)
Huang, H., Sharma, S., Zhuang, Y., et al.: Dynamic Positioning of an Uninhabited Surface Vehicle Using State-Dependent Riccati Equation and Pseudospectral Method. Ocean Eng. 133, 215–223 (2017)
Werbos, P.: Advanced forecasting methods for global crisis warning and models of intelligence. General System Yearbook, pp. 25–38 (1977)
Werbos, P.J., Miller, W.T., Sutton, R.S.: A menu of designs for reinforcement learning over time. Neural Netw. Control 67–95 (1990)
Wang, F.Y., Zhang, H., Liu, D.: Adaptive dynamic programming: an introduction. IEEE Comput. Intell. Mag. 4(2), 39–47 (2009)
Gao, X., Li, T., Shan, Q., et al.: Online optimal control for dynamic positioning of vessels via time-based adaptive dynamic programming. J. Amb. Intell. Human. Comput. (2019). https://doi.org/10.1007/s12652-019-01522-9
Lewis, F.L., Cui, B., Ma, T., Song, Y., Zhao, C.: Heterogeneous multi-agent systems: reduced-order synchronization and geometry. IEEE Trans. Autom. Control 61(5), 1391–1396 (2016)
Bai, W., Li, T., Tong, S.: NN reinforcement learning adaptive control for a class of nonstrict-feedback discrete-time systems. IEEE Trans. Cybernet. 50(11), 4573–4584 (2020)
Bai, W., Zhou, Q., Li, T., Li, H.: Adaptive reinforcement learning neural network control for uncertain nonlinear system with input saturation. IEEE Trans. Cybernet. (2019). https://doi.org/10.1109/tcyb.2019.2921057
Murray, J.J., Cox, C.J., Lendaris, G.G., Saeks, R.: Adaptive dynamic programming. IEEE Trans. Syst. Man Cybern. Part C 32(2), 140–153 (2002)
Dierks, T., Jagannathan, S.: Online optimal control of affine nonlinear discrete time systems with unknown internal dynamics by using time-based policy update. IEEE Trans. Neural Netw. Learn. Syst. 23(7), 1118–1129 (2012)
Zhang, H., Cui, L., Zhang, X., Luo, Y.: Data-driven robust approximate optimal tracking control for unknown general nonlinear systems using adaptive dynamic programming method. IEEE Trans. Neural Netw. 22(12), 2226–2236 (2011)
Vamvoudakis, K.G., Lewis, F.L.: Online actor-critic algorithm to solve the continuous-time infinite horizon optimal control problem. Automatica 46(5), 878–888 (2010)
Liu, D., Wang, D., Zhao, D., Wei, Q., Jin, N.: Neural-network-based optimal control for a class of unknown discrete-time nonlinear systems using globalized dual heuristic programming. IEEE Trans. Autom. Sci. Eng. 9(3), 628–634 (2012)
Xiao, G.Y., Zhang, H.G., Luo, Y.: Online optimal control of unknown discrete-time nonlinear systems by using time-based adaptive dynamic programming. Neurocomputing 165, 163–170 (2015)
Ge, S.S., Zhang, J., Lee, T.H.: Adaptive neural network control for a class of mimo nonlinear systems with disturbances in discrete-time. IEEE Trans. Syst. Man Cybern. B Cybern. 34(4), 1630–1645 (2004)
Gao, J., Wu, P., Li, T., et al.: Optimization-based model reference adaptive control for dynamic positioning of a fully actuated underwater vehicle. Nonlinear Dyn. 87, 2611–2623 (2017)
Zhang, H., Cui, L., Zhang, X., et al.: Data-driven robust approximate optimal tracking control for unknown general nonlinear systems using adaptive dynamic programming method. IEEE Trans. Neural Netw. 22(12), 2226–2236 (2011)
Kim, J., Ho, T., Son, S., et al.: Convergence analysis of the deep neural networks based globalized dual heuristic programming. Automatica 122, 109222 (2020)
Yin, L., Yu, T., Zhang, Z., et al.: Deep adaptive dynamic programming based integration algorithm for generation control and optimization of islanded active distribution network. Control Theory Appl. 35, 169–183 (2018)
Chen, C.P., Liu, Z.: Broad learning system: An effective and efficient incremental learning system without the need for deep architecture. IEEE Trans. Neural Netw. Learn. Syst. 29(1), 10–24 (2017)
Kong, Y., Wang, X., Cheng, Y., et al.: Hyperspectral imagery classification based on semi-supervised broad learning system. Remote Sens. 10(5), 685–698 (2018)
Zhao, H., Zheng, J., Deng, W., et al.: Semi-supervised broad learning system based on manifold regularization and broad network. IEEE Trans. Circuits Syst. I Regular Papers 67(3), 983–994 (2020)
Sui, S., Chen, C.L.P., Tong, S., et al.: Finite-time adaptive quantized control of stochastic nonlinear systems with input quantization: a broad learning system based identification method. IEEE Trans. Indus. Electron. 67(10), 8555–8565 (2020)
Chen, C.P., Liu, Z., Feng, S.: Universal approximation capability of broad learning system and its structural variations. IEEE Trans. Neural Netw. Learn. Syst. 30(4), 1191–1204 (2018)
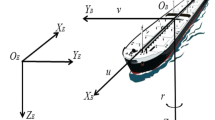
Fossen, T.I.: Handbook of Marine Craft Hydrodynamics and Motion Control. John Wiley & Sons (2011)
Sørensen, A.J.: A survey of dynamic positioning control systems. Ann. Rev. Control 35(1), 123–136 (2011)
Lin, X., Jiao, Y., Zhao, D.: An improved Gaussian filter for dynamic positioning ships With colored noises and random measurements loss. IEEE Access 6, 6620–6629 (2018)
Skjetne, R., Smogeli, Ø., Fossen, T.I.: Modeling, identification and adaptive maneuvering of Cybership II: a complete design with experiments. In: Proceedings of IFAC Conference Control Applications in Marine System, pp. 203–208 (2004)
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work is supported in part by the National Natural Science Foundation of China (under Grant Nos. 51939001, 61976033, 61903092); the Science and Technology Innovation Funds of Dalian (under Grant No. 2018J11CY022); the Liaoning Revitalization Talents Program (under Grant Nos. XLYC1908018); the Natural Foundation Guidance Plan Project of Liaoning (under Grant Nos. 2019-ZD-0151, 2020-HYLH-26); the Fundamental Research Funds for the Central Universities (under Grant No. 3132019345); the Doctoral Innovation Project of Dalian Maritime University (under Grant No. BSCXXM002).
Rights and permissions
About this article

Cite this article
Gao, X., Bai, W., Li, T. et al. Broad learning system-based adaptive optimal control design for dynamic positioning of marine vessels. Nonlinear Dyn 105, 1593–1609 (2021). https://doi.org/10.1007/s11071-021-06634-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-021-06634-6