
Abstract
The development of efficient computational methods for cracked structures is critical in the fields of civil, mechanical, and aerospace engineering since the influence of cracks on structural dynamics can play an important role in design, prognosis, and health monitoring. The nonlinearity caused by the intermittent contact on the crack surfaces typically excludes the use of fast linear methods, without which the computation of the dynamics of complex cracked structures becomes very challenging. In this paper, an efficient computational scheme for predicting both the transient and steady-state responses of cracked structures with multiple contact pairs is introduced. The new algorithm is referred to as the generalized hybrid symbolic–numeric computational (HSNC) method. The generalized HSNC method extends the original HSNC method, which was recently developed for bilinear systems, to general piecewise-linear nonlinear systems. This work also combines the HSNC with the \(\hbox {X}-\hbox {X}_{r}\) method, a reduced-order modeling technique for cracked structures, to efficiently predict the dynamics of complex structures with cracks. The generalized HSNC approach is based on the idea that the nonlinear response of a cracked structure with multiple contact pairs can be obtained by combining linear responses of the system in each of its linear states. These linear responses can be symbolically expressed as functions of the initial conditions at starting time points in each time range where the system behaves linearly. The transition time where the system switches from one linear state to another is found using a nonlinear optimization solver with the initial values provided by an incremental search process. The method is able to individually track status of each contact pair; therefore, it can be used to predict the dynamics of the system when the crack surfaces are not completely open or closed. Moreover, both the transient and steady-state responses of complex cracked structures under various forcing conditions can be captured by the new method. The generalized HSNC method provides a flexible computational framework that is several orders of magnitude faster than traditional numerical integration methods. The dynamics of a spring–mass system and cantilever beam models that contain one crack and multiple cracks are investigated using the proposed method.












Similar content being viewed by others

References
Allemang, R.: Investigation of Some Multiple Input/Output Frequency Response Experimental Modal Analysis Techniques. Ph.D .Thesis, University of Cincinnati, Mechanical Engineering Department (1980)
Bennighof, J.K., Lehoucq, R.B.: An automated multilevel substructuring method for eigenspace computation in linear elastodynamics. SIAM J. Sci. Comput. 25(6), 2084–2106 (2004). https://doi.org/10.1137/S1064827502400650
Bovsunovsky, A., Surace, C.: Non-linearities in the vibrations of elastic structures with a closing crack: a state of the art review. Mech. Syst. Signal Process. 62–63, 129–148 (2015). https://doi.org/10.1016/j.ymssp.2015.01.021
Brake, M.: A hybrid approach for the modal analysis of continuous systems with discrete piecewise-linear constraints. J. Sound Vib. 330(13), 3196–3221 (2011). https://doi.org/10.1016/j.jsv.2011.01.028
Brownjohn, J.M.W., De Stefano, A., Xu, Y.L., Wenzel, H., Aktan, A.E.: Vibration-based monitoring of civil infrastructure: challenges and successes. J. Civ. Struct. Health Monit. 1(3), 79–95 (2011). https://doi.org/10.1007/s13349-011-0009-5
Burlayenko, V.N., Sadowski, T.: Influence of skin/core debonding on free vibration behavior of foam and honeycomb cored sandwich plates. Int. J. Non-Linear Mech. 45, 959–968 (2009). https://doi.org/10.1016/j.ijnonlinmec.2009.07.002
Castanier, M.P., Óttarsson, G., Pierre, C.: A reduced order modeling technique for mistuned bladed disks. J. Vib. Acoust. 119(3), 439–447 (1997). https://doi.org/10.1115/1.2889743
Craig, R.R., Bampton, M.C.C.: Coupling of substructures for dynamic analyses. AIAA J. 6(7), 1313–1319 (1968)
Della, C.N., Shu, D.: Vibration of delaminated composite laminates: a review. Appl. Mech. Rev. 60(1), 1–20 (2007). https://doi.org/10.1115/1.2375141
Dimarogonas, A.D.: Vibration of cracked structures: a state of the art review. Eng. Fract. Mech. 55(5), 831–857 (1996)
Doebling, S.W., Farrar, C.R., Prime, M.B.: A summary review of vibration-based damage identification methods. Shock Vib. Dig. 30(2), 91–105 (1998)
Doebling, S.W., Farrar, C.R., Prime, M.B., Shevitz, D.W.: Damage identification and health monitoring of structural and mechanical systems from changes in their vibration characteristics: a literature review. In: Los Alamos National Laboratory Report LA-13070-MS. Los Alamos, NM (1996)
Dormand, J., Prince, P.: A family of embedded Runge–Kutta formulae. J. Comput. Appl. Math. 6(1), 19–26 (1980). https://doi.org/10.1016/0771-050X(80)90013-3
D’Souza, K., Epureanu, B.I.: Multiple augmentations of nonlinear systems and generalized minimum rank perturbations for damage detection. J. Sound Vib. 316(1–5), 101–121 (2008). https://doi.org/10.1016/j.jsv.2008.02.018
D’Souza, K., Epureanu, B.I., Pascual, M.: Forecasting bifurcations from large perturbation recoveries in feedback ecosystems. PLOS ONE 10(9), 1–19 (2015). https://doi.org/10.1371/journal.pone.0137779
Ewins, D.J.: Modal Testing: Theory and Practice. Research Studies Press, Taunton (1984)
Friswell, M.I., Penny, J.E.T., Garvey, S.D.: Using linear model reduction to investigate the dynamics of structures with local non-linearities. Mech. Syst. Signal Process. 9(3), 317–328 (1995)
Guyan, R.J.: Reduction of stiffness and mass matrices. AIAA J. 3(2), 380 (1965). https://doi.org/10.2514/3.2874
Hein, H., Feklistova, L.: Computationally efficient delamination detection in composite beams using Haar wavelets. Mech. Syst. Signal Process. 25(6), 2257–2270 (2011). https://doi.org/10.1016/j.ymssp.2011.02.003
Hestenes, M.R.: Multiplier and gradient methods. J. Optim. Theory Appl. 4, 303–320 (1969)
Irons, B.: Structural eigenvalue problems: elimination of unwanted variables. AIAA J. 3(5), 961–962 (1965). https://doi.org/10.2514/3.3027
Jaumouill, V., Sinou, J.J., Petitjean, B.: An adaptive harmonic balance method for predicting the nonlinear dynamic responses of mechanical systems–application to bolted structures. J. Sound Vib. 329(19), 4048–4067 (2010). https://doi.org/10.1016/j.jsv.2010.04.008
Jung, C., D’Souza, K., Epureanu, B.I.: Nonlinear amplitude approximation for bilinear systems. J. Sound Vib. 333(13), 2909–19 (2014)
Kim, J.G., Lee, P.S.: An accurate error estimator for guyan reduction. Comput. Methods Appl. Mech. Eng. 278, 1–19 (2014). https://doi.org/10.1016/j.cma.2014.05.002
Kim, J.G., Park, Y.J., Lee, G.H., Kim, D.N.: A general model reduction with primal assembly in structural dynamics. Comput. Methods Appl. Mech. Eng. 324, 1–28 (2017). https://doi.org/10.1016/j.cma.2017.06.007
Kurstak, E., D’Souza, K.: Multistage blisk and large mistuning modeling using fourier constraint modes and PRIME. J. Eng. Gas Turbines Power Trans. ASME 140(7), 072505 (2018). https://doi.org/10.1115/1.4038613
Ma, O., Wang, J.: Model order reduction for impact-contact dynamics simulations of flexible manipulators. Robotica 25(04), 397–407 (2007)
Marinescu, O., Epureanu, B., Banu, M.: Reduced order models of mistuned cracked bladed disks. J. Vib. Acoust. 133(5), 051,014 (2011)
MATLAB: version: R2017b. The MathWorks Inc., Natick, Massachusetts (2017)
Newmark, N.M.: A method of computation for structural dynamics. J. Eng. Mech. 85(EM3), 67–94 (1959)
Poudou, O.: Modeling and analysis of the dynamics of dry-friction-damped structural systems. Ph.D. thesis, The University of Michigan (2007)
Saito, A., Castanier, M.P., Pierre, C., Poudou, O.: Efficient nonlinear vibration analysis of the forced response of rotating cracked blades. J. Comput. Nonlinear Dyn. Trans. ASME 4(1), 011,005 (2009)
Shampine, L.F., Reichelt, M.W.: The matlab ode suite. SIAM J. Sci. Comput. 18(1), 1–22 (1997). https://doi.org/10.1137/S1064827594276424
Shiiryayev, O.V., Slater, J.C.: Detection of fatigue cracks using random decrement signatures. Struct. Health Monit. 9(4), 347–360 (2010)
Theodosiou, C., Natsiavas, S.: Dynamics of finite element structural models with multiple unilateral constraints. Int. J. Non-Linear Mech. 44(4), 371–382 (2009). https://doi.org/10.1016/j.ijnonlinmec.2009.01.006
Tien, M.H., D’Souza, K.: A generalized bilinear amplitude and frequency approximation for piecewise-linear nonlinear systems with gaps or prestress. Nonlinear Dyn. 88(4), 2403–2416 (2017). https://doi.org/10.1007/s11071-017-3385-5
Tien, M.H., D’Souza, K.: Analyzing bilinear systems using a new hybrid symbolic-numeric computational method. J. Vibr. Acoust. 141(3), 031008 (2019). https://doi.org/10.1115/1.4042520
Tien, M.H., Hu, T., D’Souza, K.: Generalized bilinear amplitude approximation and X-Xr for modeling cyclically symmetric structures with cracks. Journal of Vibration and Acoustics 140(4), 041,012–041,012–10 (2018). https://doi.org/10.1115/1.4039296
Tien, M.H., Hu, T., D’Souza, K.: Efficient analysis of cyclic symmetric structures with mistuning and cracks. In: AIAA Scitech 2019 Forum, pp. AIAA 2019–0489 (2019). https://doi.org/10.2514/6.2019-0489
Zhou, T., Xu, J., Sun, Z.: Dynamic analysis and diagnosis of a cracked rotor. J. Vib. Acoust. Trans. ASME 123, 534–539 (2001)
Zucca, S., Epureanu, B.I.: Reduced order models for nonlinear dynamic analysis of structures with intermittent contacts. J. Vib. Control 24(12), 2591–2604 (2018). https://doi.org/10.1177/1077546316689214
Zucca, S., Firrone, C.M., Gola, M.M.: Numerical assessment of friction damping at turbine blade root joints by simultaneous calculation of the static and dynamic contact loads. Nonlinear Dyn. 67(3), 1943–1955 (2012). https://doi.org/10.1007/s11071-011-0119-y
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declared that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A: Changing coordinates along crack surfaces
This appendix details how the local coordinates along the crack surfaces are defined and the transformation that is applied to the system matrices.

Normal vector of the pth contact pair with \(N_e^p=4\)
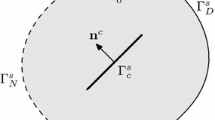
The normal vector of the pth contact pair schematically shown in Fig. 13 is defined as the mean norm of the vectors normal to the adjacent element surfaces [32]:
Note that \(\mathbf{a}_{1}^{m}\) and \(\mathbf{a}_{2}^{m}\) are the vectors from the contacting node to its adjacent nodes on the mth element, and \(N_{e}^{p}\) is the number of elements on the crack surfaces that share the contacting node. For example, \(N_{e}^{p} = 4\) represents the case where the contacting node forms a vertex of four elements as shown in Fig. 13. The contact status of the pth contact pair is tracked along the \(\mathbf{n}^{p}\) direction for \(p=1 \cdots N_{p}\), where \(N_{p}\) is the number of contact pairs in the structure.
Next, a coordinate transformation is applied such that the coordinates of the contacting nodes are aligned along the normal direction. The new local coordinates are defined using three mutually perpendicular unit vector \(\mathbf{n}^{p}\), \(\mathbf{t}_{1}^{p}\), and \(\mathbf{t}_{2}^{p}\), where (\(\mathbf{t}_{1}^{p}\), \(\mathbf{t}_{2}^{p}\)) is an arbitrary set of perpendicular unit vectors tangent to the contacting surface and perpendicular to \(\mathbf{n}^{p}\). The coordinate transformation can be expressed as
where \(\mathbf{P}_{c}^{p} = \begin{bmatrix}{} \mathbf{n}^{p}&\mathbf{t}_{1}^{p}&\mathbf{t}_{2}^{p}\end{bmatrix}\). The transformation matrix can be assembled into the global form
where \(\mathbf{P}_{c}\) is a block diagonal matrix with submatrices \(\mathbf{P}_{c}^{p}\) on the diagonal. Applying this transformation to Eq. (4) yields
where
The submatrices of \(\hat{\mathbf{M}}\) in Eq. (23) can be expressed as
Note that \(\hat{\mathbf{C}}\) and \(\hat{\mathbf{K}}\) have the same expressions in their submatrices.
Appendix B: \(\hbox {X}-\hbox {X}_{r}\) reduction method
This appendix discusses the creation of a ROM of a cracked structure using the \(\hbox {X}-\hbox {X}_r\) method and CB-CMS [28]. First, the relative coordinate transformation is performed
Note that \(\hat{\mathbf{x}}_{r} = \hat{\mathbf{x}}_{c1} - \hat{\mathbf{x}}_{c2}\) represents the relative displacement between the contact pairs and \(\mathbf{x}_{h}\) = \([\hat{\mathbf{x}}^{T}_{c2},\mathbf{x}^{T}_{l}]^{T}\) represents the coordinates of the healthy structure (i.e., the structure where the crack does not exist). A new set of equations of motion can be obtained by applying the transformation to Eq. (22)
where
Specific expressions for the submatrices of \(\overline{\mathbf{M}}\) in Eq. (27) can be expressed as
Note that \(\overline{\mathbf{C}}\) and \(\overline{\mathbf{K}}\) have the same expressions in their submatrices.
Next, the CB-CMS method is used to reduce the model size by reducing all the DOFs in \(\mathbf{x}_{h}\) using a truncated set of normal modes. The Craig–Bampton transformation matrix \({{\varvec{\beta }}}\) can be expressed as
where \({{\varvec{\Psi }}_{c}}\) includes the constraint modes and \({{\varvec{\Phi }}}_{n}\) includes the fixed interface normal modes of the healthy structure. The constraint modes are a set of static displacements of the DOFs in \(\mathbf{x}_{h}\) that can be calculated by enforcing successive unit displacements of each relative DOF in \(\mathbf{x}_{r}\) while keeping all other relative DOFs fixed. The normal modes can be obtained by solving for the eigenvectors of (\(\overline{\mathbf{K}}_{\mathbf{x}_{h}}\), \(\overline{\mathbf{M}}_{\mathbf{x}_{h}}\)). The model size is reduced by truncating the normal modes over the frequency range of interest. The coordinates are reduced using the Craig–Bampton transformation
where all the contacting DOFs \(\hat{\mathbf{x}}_{r}\) are kept active in the reduced coordinate system \(\mathbf{u}\). The equations of motion can also be reduced to
where
The explicit expressions for the submatrices of \(\mathbf{M}_{\mathrm{ROM}}\) in Eq. (32) can be expressed as
Note that \(\mathbf{C}_{\mathrm{ROM}}\) and \(\mathbf{K}_{\mathrm{ROM}}\) have the same expressions in their submatrices. Moreover, \({\mathbf{M}}_{{\varvec{\eta }}} = {{\varvec{\Phi }}}_{n}^{T}\overline{\mathbf{M}}_{{\mathbf{x}_{h}}}{{\varvec{\Phi }}}_{n} = \mathbf{I}\) and \({\mathbf{K}}_{{\varvec{\eta }}} = {{\varvec{\Phi }}}_{n}^{T}\overline{\mathbf{K}}_{{\mathbf{x}_{h}}}{{\varvec{\Phi }}}_{n} = {{\varvec{\Lambda }}}\), where \({{\varvec{\Lambda }}}\) is the eigenvalue matrix of the healthy structure.
Appendix C: Expressions for modal responses
This appendix gives the solutions for the ordinary differential equation given in Eq. (15) subject to known initial conditions, for both underdamped and overdamped modes.
For underdamped modes, the modal response can be written as
where \(\omega _{d,j}^{i}\) is the damped frequency corresponding to the natural frequency \(\omega _{j}^{i}\); \(\theta _{k,j}^{i}=\tan ^{-1}\Big [\frac{2\zeta _{j}^{i} \omega _{j}^{i} {\alpha }_{k}}{({\omega }_{j}^{i})^2-{\alpha }_{k}^2}\Big ]\); \({X}_{k,j}^{i}= \frac{G_{k,j}^{i}}{\root \of {[({\omega }_{k,j}^{i})^2 - {\alpha }_{k}^2]^2+(2\zeta _{j}^{i} \omega _{j}^{i} {\alpha }_{k})^2}}\) and \({Y}_{k,j}^{i}= \frac{H_{k,j}^{i}}{\root \of {[({\omega }_{k,j}^{i})^2 - {\alpha }_{k}^2]^2+(2\zeta _{j}^{i} \omega _{j}^{i} {\alpha }_{k})^2}}\) are the steady-state amplitudes; \({D}_{j}^{i}\) is the transient response amplitude; and \({\psi }_{j}^{i}\) is the phase angle of the transient response. Note that \({D}_{j}^{i}\) and \({\psi }_{j}^{i}\) depend on the initial modal positions \({q}_{0,j}^{i}\) and velocity \(\dot{q}_{0,j}^{i}\) that can be calculated using
The explicit expressions for \({D}_{j}^{i}\) and \({\psi }_{j}^{i}\) can be obtained by enforcing the initial conditions in Eq. (34) and its derivative, namely,
These transient parameters can be expressed as
where
For overdamped modes, the modal response can be expressed as
where \({s_{1,j}^{i}}\) and \({s_{2,j}^{i}}\) are the roots of the characteristic polynomial of the system that can be expressed as \({s_{1,j}^{i}} = {\omega }_{j}^{i}\big [-\zeta _{j}^{i} +\root \of {({\zeta _{j}^{i}})^2-1}\big ]\) and \({s_{2,j}^{i}} = {\omega }_{j}^{i}\big [-\zeta _{j}^{i} -\root \of {({\zeta _{j}^{i}})^2-1}\big ]\), respectively. \({E}_{1,j}^{i}\) and \({E}_{2,j}^{i}\) are the transient response amplitudes that can also be obtained by enforcing the initial conditions in Eq. (39) and its derivative. These parameters can be expressed as
Rights and permissions
About this article

Cite this article
Tien, MH., D’Souza, K. Transient dynamic analysis of cracked structures with multiple contact pairs using generalized HSNC. Nonlinear Dyn 96, 1115–1131 (2019). https://doi.org/10.1007/s11071-019-04844-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-019-04844-7