
Abstract
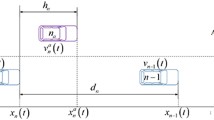
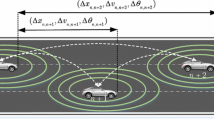
This study proposes a new car-following (CF) model considering the effect of visual angle under the non-lane-discipline environment. In particular, a car-following model is proposed to capture the impacts from the visual angle of the driver between the following vehicle and the preceding vehicle as well as its change rate on a road without lane discipline. Stability analysis of the proposed CF model is performed using the perturbation method to obtain the stability condition. Numerical experiments analyze three scenarios: start process, stop process, and evolution process for lane-discipline-based FVD model, non-lane-discipline-based CF model with lateral gap, and the proposed model, respectively. Results from numerical experiments illustrate that the proposed CF model that considers the effects of both lateral gap and visual angle has larger stable region compared with FVD model and the NLBCF model. Also, the responsiveness and smoothness of the proposed CF model is improved with respect to the velocity, and acceleration or deceleration profiles.








Similar content being viewed by others

References
Wilson, R., Ward, J.: Car-following models: fifty years of linear stability analysis-a mathematical perspective. Transp. Plan. Technol. 34(1), 3–18 (2011)
Li, Y., Sun, D.: Microscopic car-following model for the traffic flow: the state of the art. J. Control Theory Appl. 10(2), 133–143 (2012)
Saifuzzaman, M., Zheng, Z.: Incorporating human-factors in car-following models: a review of recent developments and research needs. Transp. Res. C 48, 379–403 (2014)
Li, Y., Yang, B., Zheng, T., Li, Y., Cui, M., Peeta, S.: Extended-state-observer-based double loop integral sliding mode control of electronic throttle valve. IEEE Trans. Intell. Transp. Syst. 16, 2501–2510 (2015)
Li, Y., Li, K., Zheng, T., Hu, X., Feng, H., Li, Y.: Evaluating the performance of vehicular platoon control under different network topologies of initial states. Phys. A 450, 359–368 (2016)
Ouyang, M., Zhao, L., Hong, L., Pan, Z.: Comparisons of complex network based models and real train flow model to analyze Chinese railway vulnerability. Reliab. Eng. Syst. Saf. 123, 38–46 (2014)
Hong, L., Ouyang, M., Peeta, S., He, X., Yan, Y.: Vulnerability assessment and mitigation for the Chinese railway system under floods. Reliab. Eng. Syst. Saf. 137, 58–68 (2015)
Li, Y., Zhang, L., Zheng, T., Li, Y.: Lattice hydrodynamic model based delay feedback control of vehicular traffic flow considering the effects of density change rate difference. Commun. Nonlinear Sci. Numer. Simul. 29(1–3), 224–232 (2015)
Gazis, D., Herman, R., Rothery, R.: Nonlinear follow the leader models of traffic flow. Oper. Res. 9(4), 545–567 (1961)
Gipps, P.: A behavioral car-following model for computer simulation. Transp. Res. B 15(2), 105–111 (1981)
Bando, M., Hasebe, K., Nakayama, A., Shibata, A., Sugiyama, Y.: Dynamics model of traffic congestion and numerical simulation. Phys. Rev. E 51(2), 1035–1042 (1995)
Helbing, D., Tilch, B.: Generalized force model of traffic dynamics. Phys. Rev. E 58, 133–138 (1998)
Jiang, R., Wu, Q., Zhu, Z.: Full velocity difference model for a car-following theory. Phys. Rev. E 64, 017101–017105 (2001)
Sun, D., Li, Y., Tian, C.: Car-following model based on the information of multiple ahead and velocity difference. Syst. Eng. Theory Pract. 30(7), 1326–1332 (2010)
Zhao, X., Gao, Z.: A new car-following model: full velocity and acceleration difference model. Eur. Phys. J. B 47(1), 145–150 (2005)
Wang, T., Gao, Z., Zhao, X.: Multiple velocity difference model and its stability analysis. Acta Phys. Sin. 55, 634–640 (2006)
Li, Y., Sun, D., Liu, W., Zhang, M., Zhao, M., Liao, X., Tang, L.: Modeling and simulation for microscopic traffic flow based on multiple headway, velocity and acceleration difference. Nonlinear Dyn. 66(1), 15–28 (2011)
Tang, T., Wang, Y., Yang, X., Wu, Y.: A new car-following model accounting for varying road condition. Nonlinear Dyn. 70(2), 1397–1405 (2012)
Tang, T., Shi, W., Shang, H., Wang, Y.: A new car-following model with consideration of inter-vehicle communication. Nonlinear Dyn. 76, 2017–2023 (2014)
Tang, T., Wang, Y., Yang, X., Huang, H.: A multilane traffic flow model accounting for lane width, lane-changing and the number of lanes. Netw. Spat. Econ. 14, 465–483 (2014)
Tang, T., He, J., Yang, S., Shang, H.: A car-following model accounting for the driver’s attribution. Phys. A 413, 583–591 (2014)
Tang, T., Chen, L., Yang, S., Shang, H.: An extended car-following model with consideration of the electric vehicle’s driving range. Phys. A 430, 148–155 (2015)
Yu, S., Shi, Z.: Analysis of car-following behaviors considering the green signal countdown device. Nonlinear Dyn. 82(1–2), 731–740 (2015)
Delpiano, R., Laval, J., Coeymans, J., Herrera, J.: The kinematic wave model with finite decelerations: a social force car-following model approximation. Transp. Res. B 71, 182–193 (2015)
Tang, T., Shi, W., Shang, H., Wang, Y.: An extended car-following model with consideration of the reliability of inter-vehicle communication. Measurement 58, 286–293 (2014)
Yu, S., Shi, Z.: An extended car-following model considering relative velocity fluctuation. Commun. Nonlinear Sci. Numer. Simul. 36, 319–326 (2016)
Yu, S., Shi, Z.: Dynamics of connected cruise control systems considering velocity changes with memory feedback. Measurement 64, 34–48 (2015)
Yu, S., Shi, Z.: An extended car-following model at signalized intersections. Phys. A 407, 152–159 (2014)
Ge, J., Orosz, G.: Dynamics of connected vehicle systems with delayed acceleration feedback. Transp. Res. C 46, 46–64 (2014)
Yu, S., Shi, Z.: The effects of vehicular gap changes with memory on traffic flow in cooperative adaptive cruise control strategy. Phys. A 428, 206–223 (2015)
Yu, S., Liu, Q., Li, X.: Full velocity difference and acceleration model for a car-following theory. Commun. Nonlinear Sci. Numer. Simul. 18, 1229–1234 (2013)
Treiber, M., Hennecke, A., Helbing, D.: Congested traffic states in empirical observations and microscopic simulations. Phys. Rev. E 62, 1805–1824 (2000)
Kikuchi, C., Chakroborty, P.: Car following model based on a fuzzy inference system. Transp. Res. Rec. 1365, 82–91 (1992)
Michaels, R.: Perceptual factors in car following. In: Proceedings of the Second International Symposium on the Theory of Road Traffic Flow, pp. 44–59. London (1963)
Wolfram, O.: Theory and application of cellular automata. In: Proceedings of World Scientific, Singapore (1986)
Biham, O., Middleton, A., Levine, D.: Self-organization and a dynamical transition in traffic-flow models. Phys. Rev. A 46(10), 6124–6127 (1992)
Nagel, K., Schreckenberg, M.: A cellular automaton model for freeway traffic. J. Phys. 2(12), 2221–2229 (1992)
Chandra, S., Kumar, U.: Effect of lane width on capacity under mixed traffic conditions in India. J. Transp. Eng. 129(2), 155–160 (2003)
Gunay, B.: Car following theory with lateral discomfort. Transp. Res. B 41(7), 722–735 (2007)
Jin, S., Wang, D., Tao, P., Li, P.: Non-lane-based full velocity difference car following model. Phys. A 389(21), 4654–4662 (2010)
Li, Y., Zhang, L., Peeta, S., Pan, H., Zheng, T., Li, Y., He, X.: Non-lane-discipline-based car-following model considering the effects of two-sided lateral gaps. Nonlinear Dyn. 80(1–2), 227–238 (2015)
Li, Y., Zhang, L., Zheng, H., He, X., Peeta, S., Zheng, T., Li, Y.: Evaluating the energy consumption of electric vehicles based on car-following model under non-lane discipline. Nonlinear Dyn. 82(1), 1–13 (2015)
Anderson, G., Suner, C., Sardpour, A.: Visual information for car following by drivers: role of scene information. Transp. Res. Rec. J. Transp. Res. Board 1899(1), 104–108 (2004)
Anderson, G., Sauer, C.: Optical information for car following: the driving by visual angle model. Hum. Factors 49(5), 878–896 (2007)
Zhou, J.: An extended visual angle model for car-following theory. Nonlinear Dyn. 81(1), 549–560 (2015)
Jin, S., Wang, D., Yang, X.: Non-lane-based car-following model with visual angle information. Transp. Res. Rec. J. Transp. Res. Board 2249, 7–14 (2011)
Acknowledgments
This work is jointly supported by the National Natural Science Foundation of China under Grant 61304197, the Scientific and Technological Talents of Chongqing under Grant cstc2014kjrc-qnrc30002, the Key Project of Application and Development of Chongqing under Grant No. cstc2014yykfB40001, Wenfeng Talents of CQUPT, 151 Science and Technology Major Project of Chongqing-General Design and Innovative Capability of Full Information based Traffic Guidance and Control System under Grant No. cstc2013jcsfzdzxqqX0003, the Natural Science Funds of Chongqing under Grant No. cstc2014jcyjA60003, and the Doctoral Start-up Funds of CQUPT under Grant No. A2012-26.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Li, Y., Zhang, L., Zhang, B. et al. Non-lane-discipline-based car-following model considering the effect of visual angle. Nonlinear Dyn 85, 1901–1912 (2016). https://doi.org/10.1007/s11071-016-2803-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-016-2803-4