
Abstract:
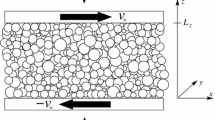
We introduce a simple model to describe the frictional properties of granular media under shear. We model the friction force in terms of the horizontal velocity and the vertical position z of the slider, interpreting z as a constitutive variable characterizing the contact. Dilatancy is shown to play an essential role in the dynamics, inducing a stick-slip instability at low velocity. We compute the phase diagram, analyze numerically the model for a wide range of parameters and compare our results with experiments on dry and wet granular media, obtaining a good agreement. In particular, we reproduce the hysteretic velocity dependence of the frictional force.
Similar content being viewed by others

Author information
Authors and Affiliations
Additional information
Received 16 November 1999
Rights and permissions
About this article
Cite this article
Lacombe, F., Zapperi, S. & Herrmann, H. Dilatancy and friction in sheared granular media. Eur. Phys. J. E 2, 181–189 (2000). https://doi.org/10.1007/s101890050052
Issue Date:
DOI: https://doi.org/10.1007/s101890050052